目录
-
- 1.摘要
- 2.建模与问题表述
- [3. 灾后供电恢复求解方法](#3. 灾后供电恢复求解方法)
- 4.实验结果
- 5.参考文献
- 6.算法辅导·应用定制·读者交流
1.摘要
本文研究灾后供电恢复场景:避难所电池的可充电时间由自身荷电状态(SoC)和耗电速度动态决定,电动汽车既负责运输,也承担移动储能。目标是在每个避难所电池的动态充电时间约束内满足其用电需求,并最小化车队总配送成本。模型显式考虑道路坡度对电动汽车行驶能耗的影响。方法分两阶段:先从受灾道路网络中抽取简化图,再建立混合整数线性规划模型。
2.建模与问题表述
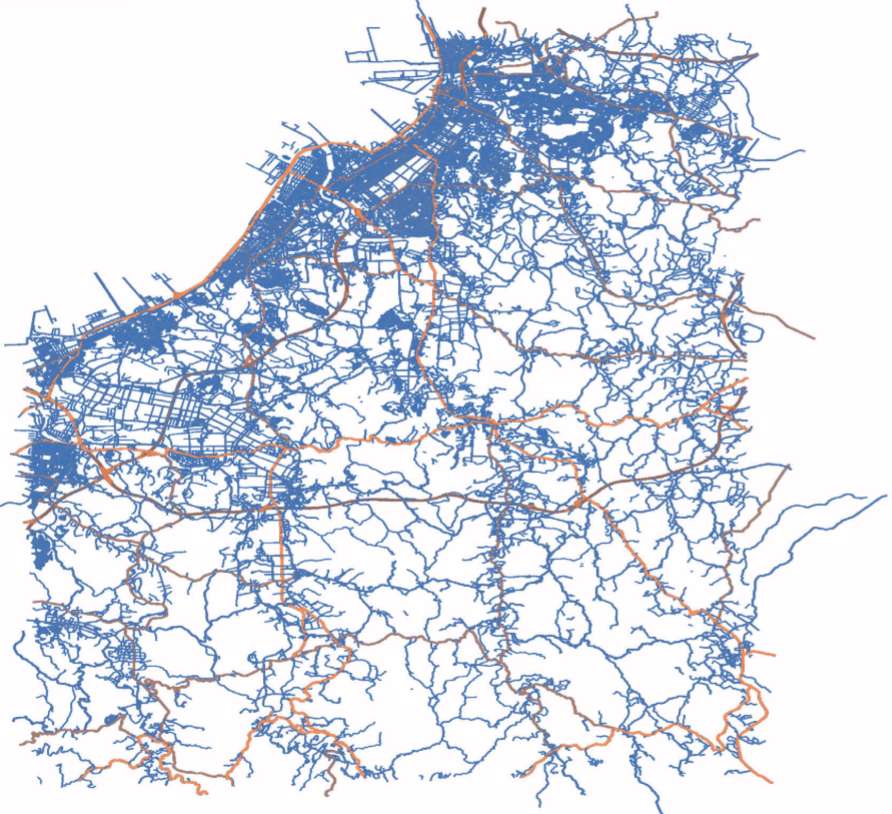
受灾道路网络表示为原始图 (G=(V,E,D,P)),节点集合包含配送中心、避难所和道路交叉口,边表示道路连接,(D) 为距离矩阵,(P) 为电动汽车在边上行驶的能耗矩阵。
避难所电池需求由 SoC 动态给出。第 i i i个避难所电池在车辆开始充电时刻 s i k s_{ik} sik 的 SoC 为:
S o C i ( s i k ) = S o C i ( 0 ) − ∫ 0 s i k η ρ i ( t ) Q i d t SoC_i(s_{ik})=SoC_i(0)-\int_0^{s_{ik}}\frac{\eta\rho_i(t)}{Q_i}\,dt SoCi(sik)=SoCi(0)−∫0sikQiηρi(t)dt
车辆到达时补电需求:
ϕ i ( s i k ) = Q i U ( S o C m a x − S o C i ( s i k ) ) \phi_i(s_{ik})=Q_iU\left(SoC_{max}-SoC_i(s_{ik})\right) ϕi(sik)=QiU(SoCmax−SoCi(sik))
若充电速度为 c s c_s cs,则充电时长为:
c i k = ϕ i ( s i k ) c s c_{ik}=\frac{\phi_i(s_{ik})}{c_s} cik=csϕi(sik)
目标是使所有避难所电池在动态时间窗内被充电,同时最小化总恢复成本。成本由行驶时间、充电时间和等待时间组成:
min Z ( x , s , t ) = Z 1 ( x ) + Z 2 ( s ) + Z 3 ( t ) \min Z(x,s,t)=Z_1(x)+Z_2(s)+Z_3(t) minZ(x,s,t)=Z1(x)+Z2(s)+Z3(t)
其中:
Z 1 = ∑ k ∈ K ∑ i , j ∈ V s d ˉ i j v ˉ x i j k , Z 2 = ∑ k ∈ K ∑ i ∈ V s c i k , Z 3 = α ∑ k ∈ K ∑ i ∈ V s w i k Z_1=\sum_{k\in K}\sum_{i,j\in V_s}\frac{\bar d_{ij}}{\bar v}x_{ijk},\quad Z_2=\sum_{k\in K}\sum_{i\in V_s}c_{ik},\quad Z_3=\alpha\sum_{k\in K}\sum_{i\in V_s}w_{ik} Z1=k∈K∑i,j∈Vs∑vˉdˉijxijk,Z2=k∈K∑i∈Vs∑cik,Z3=αk∈K∑i∈Vs∑wik
本文本质是带动态时间窗VRPTW 变体,目标包含行驶时间、服务时间和等待时间的加权和,时间窗由避难所电池 SoC 动态生成,更贴近灾后应急能源配送。
3. 灾后供电恢复求解方法
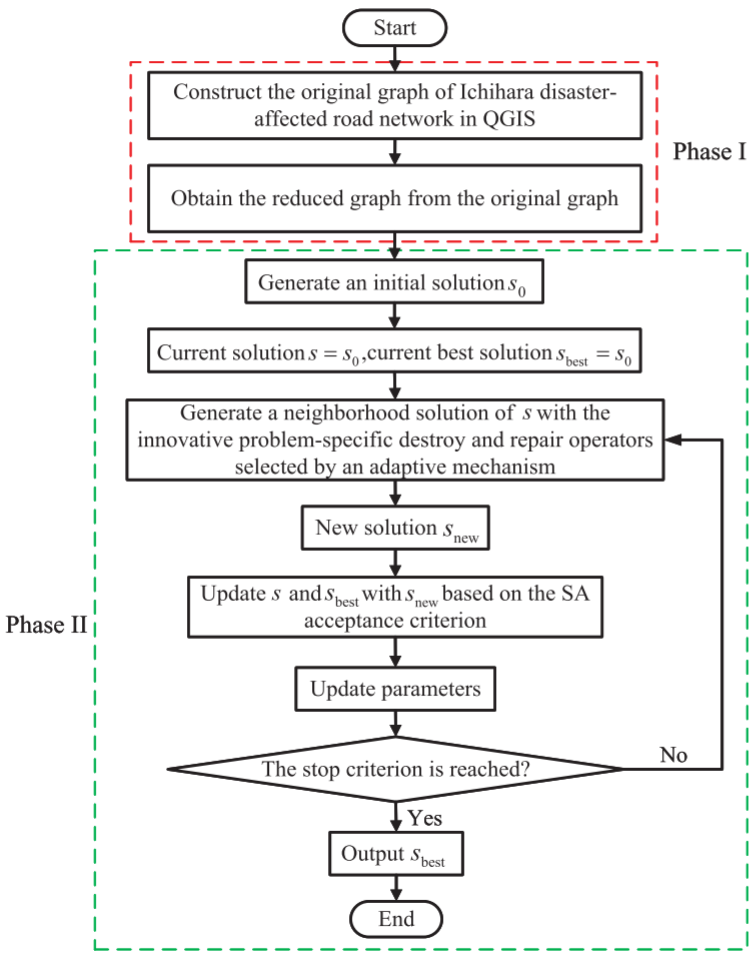
采用两阶段方法,第一阶段用 Dijkstra 算法从原始道路网络得到只含配送中心和避难所的简化图,生成最短距离矩阵和对应能耗矩阵。第二阶段基于简化图用 ALNS 生成配送方案。解用整数序列编码,0 表示配送中心,也用于划分不同车辆路线。
第一阶段:获得简化图
简化图 G ˉ = ( V ˉ , E ˉ , D ˉ , P ˉ ) \bar G=(\bar V,\bar E,\bar D,\bar P) Gˉ=(Vˉ,Eˉ,Dˉ,Pˉ) 中, V ˉ \bar V Vˉ只保留配送中心和避难所。任意两服务节点间的距离 d ˉ i j \bar d_{ij} dˉij由原始图中的最短路确定:
d ˉ i j = min R ∑ ( u , v ) ∈ R d u v \bar d_{ij}=\min_R\sum_{(u,v)\in R}d_{uv} dˉij=Rmin(u,v)∈R∑duv
能耗矩阵由最短距离路径上的坡度与车辆动力模型计算。道路坡度为:
θ v i , v j = arctan z v i − z v j ( x v i − x v j ) 2 + ( y v i − y v j ) 2 \theta_{v_i,v_j}=\arctan\frac{z_{v_i}-z_{v_j}}{\sqrt{(x_{v_i}-x_{v_j})^2+(y_{v_i}-y_{v_j})^2}} θvi,vj=arctan(xvi−xvj)2+(yvi−yvj)2 zvi−zvj
沿路径积分得到 SoC 消耗,再乘以电池容量得到节点对之间的行驶能耗。
第二阶段:求解配送计划
ALNS 从随机初始解开始,循环执行破坏和修复操作生成邻域解,并用模拟退火准则决定是否接受。破坏算子包括随机移除、整条路线移除、相关性移除、最差贡献移除和轮盘赌移除。相关性由两避难所间行驶时间、等待时间差和充电时间差构成:
R ( i , j ) = 1 ψ d ˉ i j v ˉ r + χ ∣ w i − w j ∣ + ω ∣ c i − c j ∣ R(i,j)=\frac{1}{\psi}\frac{\bar d_{ij}}{\bar v_r}+\chi|w_i-w_j|+\omega|c_i-c_j| R(i,j)=ψ1vˉrdˉij+χ∣wi−wj∣+ω∣ci−cj∣
修复算子包括随机插入、贪婪插入、轮盘赌插入,以及基于行驶时间、等待时间和充电时间变化的专用插入。算子权重按阶段自适应更新:若产生全局最优解、优于当前解或虽更差但被接受,分别给不同奖励。
4.实验结果
实验采用 Anaheim 公共道路网络,随机选择 200 个节点构造不同规模算例。
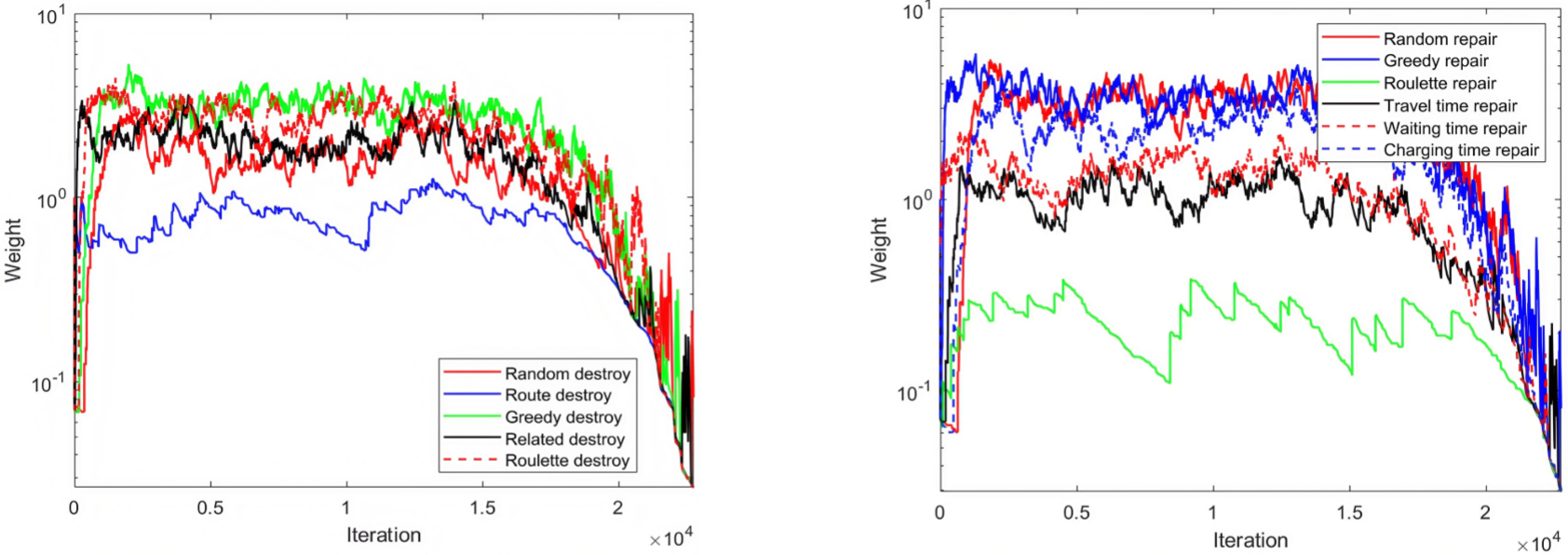
算例分为小规模(5--12 个避难所)、中规模(20--70 个避难所)和大规模(80--200 个避难所)。小规模算例用 CPLEX 验证模型和算法,三个启发式算法均能得到与 CPLEX 相同的结果。中大规模中,本文 ALNS 在总成本、车辆使用数、平均值和标准差上整体最好,稳定性最强。虽在少数小规模和中规模算例中耗时略长,但规模增大后求解时间低于两个对比算法。算子权重变化表明,不同破坏和修复算子在搜索中作用差异明显,自适应选择机制能够提高算法效果。
5.参考文献
Liu Q, Xu P, Wu Y, et al. Efficient Post-Disaster Emergency Energy Delivery Under Dynamic Constraints: An Electric Vehicle Routing ApproachJ. IEEE Transactions on Intelligent Transportation Systems, 2026.
6.算法辅导·应用定制·读者交流
xx