Ultralytics:解读DeformableTransformerDecoder模块
- 前言
- 相关介绍
-
- [Ultralytics 简介](#Ultralytics 简介)
- 前提条件
- 实验环境
- DeformableTransformerDecoder(可变形Transformer解码器)
- 参考文献
前言
- 由于本人水平有限,难免出现错漏,敬请批评改正。
- 更多精彩内容,可点击进入Python日常小操作专栏、OpenCV-Python小应用专栏、YOLO系列专栏、自然语言处理专栏、人工智能混合编程实践专栏或我的个人主页查看
- YOLOs-CPP:一个免费开源的YOLO全系列C++推理库(以YOLO26为例)
- PaddleOCR:Win10上安装使用PPOCRLabel标注工具
- 目标检测:使用自己的数据集微调DEIMv2进行物体检测
- 图像分割:PyTorch从零开始实现SegFormer语义分割
- 图像超分:使用自己的数据集微调Real-ESRGAN-x4plus进行超分重建
- 图像生成:PyTorch从零开始实现一个简单的扩散模型
- Stable Diffusion:使用自己的数据集微调 Stable Diffusion 3.5 LoRA 文生图模型
- 图像超分:使用自己的数据集微调Real-ESRGAN-x2plus进行超分重建
- Anomalib:使用Anomalib 2.1.0训练自己的数据集进行异常检测
- Anomalib:在Linux服务器上安装使用Anomalib 2.1.0
- 人工智能混合编程实践:C++调用封装好的DLL进行异常检测推理
- 人工智能混合编程实践:C++调用封装好的DLL进行FP16图像超分重建(v3.0)
- 隔离系统Python:源码编译3.11.8到自定义目录(含PGO性能优化)
- 在线机的Python环境迁移到离线机上
- Nuitka 将 Python 脚本封装为 .pyd 或 .so 文件
- Ultralytics:使用 YOLO11 进行速度估计
- Ultralytics:使用 YOLO11 进行物体追踪
- Ultralytics:使用 YOLO11 进行物体计数
- Ultralytics:使用 YOLO11 进行目标打码
- 人工智能混合编程实践:C++调用Python ONNX进行YOLOv8推理
- 人工智能混合编程实践:C++调用封装好的DLL进行YOLOv8实例分割
- 人工智能混合编程实践:C++调用Python ONNX进行图像超分重建
- 人工智能混合编程实践:C++调用Python AgentOCR进行文本识别
- 通过计算实例简单地理解PatchCore异常检测
- Python将YOLO格式实例分割数据集转换为COCO格式实例分割数据集
- YOLOv8 Ultralytics:使用Ultralytics框架训练RT-DETR实时目标检测模型
- 基于DETR的人脸伪装检测
- YOLOv7训练自己的数据集(口罩检测)
- YOLOv8训练自己的数据集(足球检测)
- YOLOv5:TensorRT加速YOLOv5模型推理
- YOLOv5:IoU、GIoU、DIoU、CIoU、EIoU
- 玩转Jetson Nano(五):TensorRT加速YOLOv5目标检测
- YOLOv5:添加SE、CBAM、CoordAtt、ECA注意力机制
- YOLOv5:yolov5s.yaml配置文件解读、增加小目标检测层
- Python将COCO格式实例分割数据集转换为YOLO格式实例分割数据集
- YOLOv5:使用7.0版本训练自己的实例分割模型(车辆、行人、路标、车道线等实例分割)
- 使用Kaggle GPU资源免费体验Stable Diffusion开源项目
- Stable Diffusion:在服务器上部署使用Stable Diffusion WebUI进行AI绘图(v2.0)
- Stable Diffusion:使用自己的数据集微调训练LoRA模型(v2.0)
相关介绍
Ultralytics 简介
Ultralytics 基于多年的计算机视觉和人工智能基础研究,创建了最先进的 (SOTA) YOLO 模型。我们的模型不断更新性能和灵活性,快速、准确且易于使用。他们擅长对象检测、跟踪、实例分割、语义分割、图像分类和姿势估计任务。
前提条件
- 熟悉Python、Pytorch
实验环境
bash
Package Version
------------------------ ------------
Python 3.11.8
absl-py 2.4.0
accelerate 1.13.0
annotated-doc 0.0.4
anyio 4.13.0
calflops 0.3.2
certifi 2026.4.22
charset-normalizer 3.4.7
click 8.3.3
colorama 0.4.6
contourpy 1.3.3
cycler 0.12.1
filelock 3.29.0
flatbuffers 25.12.19
fonttools 4.62.1
fsspec 2026.4.0
grpcio 1.80.0
h11 0.16.0
hf-xet 1.5.0
httpcore 1.0.9
httpx 0.28.1
huggingface_hub 1.14.0
idna 3.15
Jinja2 3.1.6
kiwisolver 1.5.0
Markdown 3.10.2
markdown-it-py 4.2.0
MarkupSafe 3.0.3
matplotlib 3.10.9
mdurl 0.1.2
ml_dtypes 0.5.0
mpmath 1.3.0
networkx 3.6.1
numpy 1.26.4
nvidia-cublas-cu12 12.8.3.14
nvidia-cuda-cupti-cu12 12.8.57
nvidia-cuda-nvrtc-cu12 12.8.61
nvidia-cuda-runtime-cu12 12.8.57
nvidia-cudnn-cu12 9.7.1.26
nvidia-cufft-cu12 11.3.3.41
nvidia-cufile-cu12 1.13.0.11
nvidia-curand-cu12 10.3.9.55
nvidia-cusolver-cu12 11.7.2.55
nvidia-cusparse-cu12 12.5.7.53
nvidia-cusparselt-cu12 0.6.3
nvidia-nccl-cu12 2.26.2
nvidia-nvjitlink-cu12 12.8.61
nvidia-nvtx-cu12 12.8.55
onnx 1.19.0
onnxruntime-gpu 1.26.0
onnxslim 0.1.94
opencv-python 4.6.0.66
packaging 26.2
pillow 12.2.0
pip 24.0
polars 1.40.1
polars-runtime-32 1.40.1
protobuf 7.34.1
psutil 7.2.2
pycocotools 2.0.11
Pygments 2.20.0
pyparsing 3.3.2
python-dateutil 2.9.0.post0
PyYAML 6.0.3
regex 2026.5.9
requests 2.34.1
rich 15.0.0
safetensors 0.7.0
scipy 1.16.0
setuptools 65.5.0
shellingham 1.5.4
six 1.17.0
sympy 1.14.0
tabulate 0.10.0
tensorboard 2.20.0
tensorboard-data-server 0.7.2
tokenizers 0.22.2
torch 2.7.1+cu128
torchaudio 2.7.1+cu128
torchvision 0.22.1+cu128
tqdm 4.67.3
transformers 5.8.1
triton 3.3.1
typer 0.25.1
typing_extensions 4.15.0
ultralytics 8.4.58
ultralytics-thop 2.0.19
urllib3 2.7.0
Werkzeug 3.1.8DeformableTransformerDecoder(可变形Transformer解码器)
DeformableTransformerDecoder 是 Deformable-DETR 解码器的完整实现,它由多个 DeformableTransformerDecoderLayer 堆叠而成,并集成了 迭代边界框细化 和 多层预测 机制。该模块以解码器嵌入、参考框和多尺度特征为输入,通过多层可变形注意力逐步优化目标框和分类分数,是目标检测任务中高效且强大的解码组件。
代码实现
python
import cv2
import math
import copy
import torch
import numpy as np
import matplotlib.pyplot as plt
from torch import nn
import torch.nn.functional as F
from torch.nn.init import constant_, xavier_uniform_
def inverse_sigmoid(x, eps=1e-5):
"""Calculate the inverse sigmoid function for a tensor.
This function applies the inverse of the sigmoid function to a tensor, which is useful in various neural network
operations, particularly in attention mechanisms and coordinate transformations.
Args:
x (torch.Tensor): Input tensor with values in range [0, 1].
eps (float, optional): Small epsilon value to prevent numerical instability.
Returns:
(torch.Tensor): Tensor after applying the inverse sigmoid function.
Examples:
>>> x = torch.tensor([0.2, 0.5, 0.8])
>>> inverse_sigmoid(x)
tensor([-1.3863, 0.0000, 1.3863])
"""
x = x.clamp(min=0, max=1)
x1 = x.clamp(min=eps)
x2 = (1 - x).clamp(min=eps)
return torch.log(x1 / x2)
def multi_scale_deformable_attn_pytorch(
value: torch.Tensor,
value_spatial_shapes: list,
sampling_locations: torch.Tensor,
attention_weights: torch.Tensor,
) -> torch.Tensor:
"""Implement multi-scale deformable attention in PyTorch.
Folds the (num_levels, num_points) axes into a single num_total_points axis so every traced tensor stays at rank <=
5, the maximum rank supported by CoreML's MIL converter. Numerically equivalent to the rank-6 reference
implementation on CUDA and CPU.
Args:
value (torch.Tensor): Value tensor with shape (bs, num_keys, num_heads, embed_dims).
value_spatial_shapes (list): Per-level spatial shapes as [(H_0, W_0), ..., (H_{L-1}, W_{L-1})].
sampling_locations (torch.Tensor): Sampling locations with shape (bs, num_queries, num_heads, num_levels *
num_points, 2).
attention_weights (torch.Tensor): Attention weights with shape (bs, num_queries, num_heads, num_levels *
num_points).
Returns:
(torch.Tensor): Output tensor with shape (bs, num_queries, num_heads * embed_dims).
References:
https://github.com/IDEA-Research/detrex/blob/main/detrex/layers/multi_scale_deform_attn.py
"""
bs, _, num_heads, embed_dims = value.shape
_, num_queries, _, num_total_points, _ = sampling_locations.shape
num_points = num_total_points // len(value_spatial_shapes)
# (bs, num_keys, num_heads, embed_dims) -> tuple of (bs*num_heads, embed_dims, H*W) per level
value_list = value.permute(0, 2, 3, 1).flatten(0, 1).split([h * w for h, w in value_spatial_shapes], dim=-1)
# Map to grid_sample coords in [-1, 1] and split per level: tuple of (bs*num_heads, num_queries, num_points, 2)
sampling_grids = (2 * sampling_locations - 1).permute(0, 2, 1, 3, 4).flatten(0, 1).split(num_points, dim=-2)
sampling_value_list = []
for level, (h, w) in enumerate(value_spatial_shapes):
value_l = value_list[level].reshape(bs * num_heads, embed_dims, h, w)
sampling_value_list.append(
F.grid_sample(value_l, sampling_grids[level], mode="bilinear", padding_mode="zeros", align_corners=False)
)
attention_weights = attention_weights.permute(0, 2, 1, 3).reshape(bs * num_heads, 1, num_queries, num_total_points)
output = (
(torch.cat(sampling_value_list, dim=-1) * attention_weights)
.sum(-1)
.view(bs, num_heads * embed_dims, num_queries)
)
return output.transpose(1, 2).contiguous()
class MSDeformAttn(nn.Module):
"""Multiscale Deformable Attention Module based on Deformable-DETR and PaddleDetection implementations.
This module implements multiscale deformable attention that can attend to features at multiple scales with learnable
sampling locations and attention weights.
Attributes:
im2col_step (int): Step size for im2col operations.
d_model (int): Model dimension.
n_levels (int): Number of feature levels.
n_heads (int): Number of attention heads.
n_points (int): Number of sampling points per attention head per feature level.
sampling_offsets (nn.Linear): Linear layer for generating sampling offsets.
attention_weights (nn.Linear): Linear layer for generating attention weights.
value_proj (nn.Linear): Linear layer for projecting values.
output_proj (nn.Linear): Linear layer for projecting output.
References:
https://github.com/fundamentalvision/Deformable-DETR/blob/main/models/ops/modules/ms_deform_attn.py
"""
def __init__(self, d_model: int = 256, n_levels: int = 4, n_heads: int = 8, n_points: int = 4):
"""Initialize MSDeformAttn with the given parameters.
Args:
d_model (int): Model dimension.
n_levels (int): Number of feature levels.
n_heads (int): Number of attention heads.
n_points (int): Number of sampling points per attention head per feature level.
"""
super().__init__()
if d_model % n_heads != 0:
raise ValueError(f"d_model must be divisible by n_heads, but got {d_model} and {n_heads}")
_d_per_head = d_model // n_heads
# Better to set _d_per_head to a power of 2 which is more efficient in a CUDA implementation
assert _d_per_head * n_heads == d_model, "`d_model` must be divisible by `n_heads`"
self.im2col_step = 64
self.d_model = d_model
self.n_levels = n_levels
self.n_heads = n_heads
self.n_points = n_points
self.sampling_offsets = nn.Linear(d_model, n_heads * n_levels * n_points * 2)
self.attention_weights = nn.Linear(d_model, n_heads * n_levels * n_points)
self.value_proj = nn.Linear(d_model, d_model)
self.output_proj = nn.Linear(d_model, d_model)
self._reset_parameters()
def _reset_parameters(self):
"""Reset module parameters."""
constant_(self.sampling_offsets.weight.data, 0.0)
thetas = torch.arange(self.n_heads, dtype=torch.float32) * (2.0 * math.pi / self.n_heads)
grid_init = torch.stack([thetas.cos(), thetas.sin()], -1)
grid_init = (
(grid_init / grid_init.abs().max(-1, keepdim=True)[0])
.view(self.n_heads, 1, 1, 2)
.repeat(1, self.n_levels, self.n_points, 1)
)
for i in range(self.n_points):
grid_init[:, :, i, :] *= i + 1
with torch.no_grad():
self.sampling_offsets.bias = nn.Parameter(grid_init.view(-1))
constant_(self.attention_weights.weight.data, 0.0)
constant_(self.attention_weights.bias.data, 0.0)
xavier_uniform_(self.value_proj.weight.data)
constant_(self.value_proj.bias.data, 0.0)
xavier_uniform_(self.output_proj.weight.data)
constant_(self.output_proj.bias.data, 0.0)
def forward(
self,
query: torch.Tensor,
refer_bbox: torch.Tensor,
value: torch.Tensor,
value_shapes: list,
value_mask: torch.Tensor | None = None,
) -> torch.Tensor:
"""Perform forward pass for multiscale deformable attention.
Args:
query (torch.Tensor): Query tensor with shape [bs, query_length, C].
refer_bbox (torch.Tensor): Reference bounding boxes with shape [bs, query_length, 1, 2 or 4], range in [0,
1], top-left (0,0), bottom-right (1, 1). The size-1 axis broadcasts across n_levels.
value (torch.Tensor): Value tensor with shape [bs, value_length, C].
value_shapes (list): List with shape [n_levels, 2], [(H_0, W_0), (H_1, W_1), ..., (H_{L-1}, W_{L-1})].
value_mask (torch.Tensor, optional): Mask tensor with shape [bs, value_length], True for padding elements,
False for non-padding elements.
Returns:
(torch.Tensor): Output tensor with shape [bs, Length_{query}, C].
References:
https://github.com/PaddlePaddle/PaddleDetection/blob/develop/ppdet/modeling/transformers/deformable_transformer.py
"""
bs, len_q = query.shape[:2]
len_v = value.shape[1]
assert sum(s[0] * s[1] for s in value_shapes) == len_v
value = self.value_proj(value)
if value_mask is not None:
value = value.masked_fill(value_mask[..., None], float(0))
value = value.view(bs, len_v, self.n_heads, self.d_model // self.n_heads)
# Fold (n_levels, n_points) into one axis so every traced tensor stays at rank <= 5 (required for CoreML
# export); refer_bbox arrives as (bs, len_q, 1, 2 or 4) and its size-1 axis broadcasts implicitly.
n_total_points = self.n_levels * self.n_points
sampling_offsets = self.sampling_offsets(query).view(bs, len_q, self.n_heads, n_total_points, 2)
attention_weights = self.attention_weights(query).view(bs, len_q, self.n_heads, n_total_points)
attention_weights = F.softmax(attention_weights, -1)
num_points = refer_bbox.shape[-1]
if num_points == 2:
offset_normalizer = torch.as_tensor(value_shapes, dtype=query.dtype, device=query.device).flip(-1)
offset_normalizer = offset_normalizer[:, None, :].expand(-1, self.n_points, -1).reshape(n_total_points, 2)
sampling_locations = refer_bbox[:, :, None, :, :] + sampling_offsets / offset_normalizer
elif num_points == 4:
sampling_locations = (
refer_bbox[:, :, None, :, :2] + sampling_offsets / self.n_points * refer_bbox[:, :, None, :, 2:] * 0.5
)
else:
raise ValueError(f"Last dim of reference_points must be 2 or 4, but got {num_points}.")
output = multi_scale_deformable_attn_pytorch(value, value_shapes, sampling_locations, attention_weights)
return self.output_proj(output)
class DeformableTransformerDecoderLayer(nn.Module):
"""Deformable Transformer Decoder Layer inspired by PaddleDetection and Deformable-DETR implementations.
This class implements a single decoder layer with self-attention, cross-attention using multiscale deformable
attention, and a feedforward network.
Attributes:
self_attn (nn.MultiheadAttention): Self-attention module.
dropout1 (nn.Dropout): Dropout after self-attention.
norm1 (nn.LayerNorm): Layer normalization after self-attention.
cross_attn (MSDeformAttn): Cross-attention module.
dropout2 (nn.Dropout): Dropout after cross-attention.
norm2 (nn.LayerNorm): Layer normalization after cross-attention.
linear1 (nn.Linear): First linear layer in the feedforward network.
act (nn.Module): Activation function.
dropout3 (nn.Dropout): Dropout in the feedforward network.
linear2 (nn.Linear): Second linear layer in the feedforward network.
dropout4 (nn.Dropout): Dropout after the feedforward network.
norm3 (nn.LayerNorm): Layer normalization after the feedforward network.
References:
https://github.com/PaddlePaddle/PaddleDetection/blob/develop/ppdet/modeling/transformers/deformable_transformer.py
https://github.com/fundamentalvision/Deformable-DETR/blob/main/models/deformable_transformer.py
"""
def __init__(
self,
d_model: int = 256,
n_heads: int = 8,
d_ffn: int = 1024,
dropout: float = 0.0,
act: nn.Module = nn.ReLU(),
n_levels: int = 4,
n_points: int = 4,
):
"""Initialize the DeformableTransformerDecoderLayer with the given parameters.
Args:
d_model (int): Model dimension.
n_heads (int): Number of attention heads.
d_ffn (int): Dimension of the feedforward network.
dropout (float): Dropout probability.
act (nn.Module): Activation function.
n_levels (int): Number of feature levels.
n_points (int): Number of sampling points.
"""
super().__init__()
# Self attention
self.self_attn = nn.MultiheadAttention(d_model, n_heads, dropout=dropout)
self.dropout1 = nn.Dropout(dropout)
self.norm1 = nn.LayerNorm(d_model)
# Cross attention
self.cross_attn = MSDeformAttn(d_model, n_levels, n_heads, n_points)
self.dropout2 = nn.Dropout(dropout)
self.norm2 = nn.LayerNorm(d_model)
# FFN
self.linear1 = nn.Linear(d_model, d_ffn)
self.act = act
self.dropout3 = nn.Dropout(dropout)
self.linear2 = nn.Linear(d_ffn, d_model)
self.dropout4 = nn.Dropout(dropout)
self.norm3 = nn.LayerNorm(d_model)
@staticmethod
def with_pos_embed(tensor: torch.Tensor, pos: torch.Tensor | None) -> torch.Tensor:
"""Add positional embeddings to the input tensor, if provided."""
return tensor if pos is None else tensor + pos
def forward_ffn(self, tgt: torch.Tensor) -> torch.Tensor:
"""Perform forward pass through the Feed-Forward Network part of the layer.
Args:
tgt (torch.Tensor): Input tensor.
Returns:
(torch.Tensor): Output tensor after FFN.
"""
tgt2 = self.linear2(self.dropout3(self.act(self.linear1(tgt))))
tgt = tgt + self.dropout4(tgt2)
return self.norm3(tgt)
def forward(
self,
embed: torch.Tensor,
refer_bbox: torch.Tensor,
feats: torch.Tensor,
shapes: list,
padding_mask: torch.Tensor | None = None,
attn_mask: torch.Tensor | None = None,
query_pos: torch.Tensor | None = None,
) -> torch.Tensor:
"""Perform the forward pass through the entire decoder layer.
Args:
embed (torch.Tensor): Input embeddings.
refer_bbox (torch.Tensor): Reference bounding boxes.
feats (torch.Tensor): Feature maps.
shapes (list): Feature shapes.
padding_mask (torch.Tensor, optional): Padding mask.
attn_mask (torch.Tensor, optional): Attention mask.
query_pos (torch.Tensor, optional): Query position embeddings.
Returns:
(torch.Tensor): Output tensor after decoder layer.
"""
# Self attention
q = k = self.with_pos_embed(embed, query_pos)
tgt = self.self_attn(q.transpose(0, 1), k.transpose(0, 1), embed.transpose(0, 1), attn_mask=attn_mask)[
0
].transpose(0, 1)
embed = embed + self.dropout1(tgt)
embed = self.norm1(embed)
# Cross attention
tgt = self.cross_attn(
self.with_pos_embed(embed, query_pos), refer_bbox.unsqueeze(2), feats, shapes, padding_mask
)
embed = embed + self.dropout2(tgt)
embed = self.norm2(embed)
# FFN
return self.forward_ffn(embed)
def _get_clones(module, n):
"""Create a list of cloned modules from the given module.
Args:
module (nn.Module): The module to be cloned.
n (int): Number of clones to create.
Returns:
(nn.ModuleList): A ModuleList containing n clones of the input module.
Examples:
>>> import torch.nn as nn
>>> layer = nn.Linear(10, 10)
>>> clones = _get_clones(layer, 3)
>>> len(clones)
3
"""
return nn.ModuleList([copy.deepcopy(module) for _ in range(n)])
class DeformableTransformerDecoder(nn.Module):
"""Deformable Transformer Decoder based on PaddleDetection implementation.
This class implements a complete deformable transformer decoder with multiple decoder layers and prediction heads
for bounding box regression and classification.
Attributes:
layers (nn.ModuleList): List of decoder layers.
num_layers (int): Number of decoder layers.
hidden_dim (int): Hidden dimension.
eval_idx (int): Index of the layer to use during evaluation.
References:
https://github.com/PaddlePaddle/PaddleDetection/blob/develop/ppdet/modeling/transformers/deformable_transformer.py
"""
def __init__(self, hidden_dim: int, decoder_layer: nn.Module, num_layers: int, eval_idx: int = -1):
"""Initialize the DeformableTransformerDecoder with the given parameters.
Args:
hidden_dim (int): Hidden dimension.
decoder_layer (nn.Module): Decoder layer module.
num_layers (int): Number of decoder layers.
eval_idx (int): Index of the layer to use during evaluation.
"""
super().__init__()
self.layers = _get_clones(decoder_layer, num_layers)
self.num_layers = num_layers
self.hidden_dim = hidden_dim
self.eval_idx = eval_idx if eval_idx >= 0 else num_layers + eval_idx
def forward(
self,
embed: torch.Tensor, # decoder embeddings
refer_bbox: torch.Tensor, # anchor
feats: torch.Tensor, # image features
shapes: list, # feature shapes
bbox_head: nn.Module,
score_head: nn.Module,
pos_mlp: nn.Module,
attn_mask: torch.Tensor | None = None,
padding_mask: torch.Tensor | None = None,
):
"""Perform the forward pass through the entire decoder.
Args:
embed (torch.Tensor): Decoder embeddings.
refer_bbox (torch.Tensor): Reference bounding boxes.
feats (torch.Tensor): Image features.
shapes (list): Feature shapes.
bbox_head (nn.Module): Bounding box prediction head.
score_head (nn.Module): Score prediction head.
pos_mlp (nn.Module): Position MLP.
attn_mask (torch.Tensor, optional): Attention mask.
padding_mask (torch.Tensor, optional): Padding mask.
Returns:
dec_bboxes (torch.Tensor): Decoded bounding boxes.
dec_cls (torch.Tensor): Decoded classification scores.
"""
output = embed
dec_bboxes = []
dec_cls = []
last_refined_bbox = None
refer_bbox = refer_bbox.sigmoid()
for i, layer in enumerate(self.layers):
output = layer(output, refer_bbox, feats, shapes, padding_mask, attn_mask, pos_mlp(refer_bbox))
bbox = bbox_head[i](output)
refined_bbox = torch.sigmoid(bbox + inverse_sigmoid(refer_bbox))
if self.training:
dec_cls.append(score_head[i](output))
if i == 0:
dec_bboxes.append(refined_bbox)
else:
dec_bboxes.append(torch.sigmoid(bbox + inverse_sigmoid(last_refined_bbox)))
elif i == self.eval_idx:
dec_cls.append(score_head[i](output))
dec_bboxes.append(refined_bbox)
break
last_refined_bbox = refined_bbox
refer_bbox = refined_bbox.detach() if self.training else refined_bbox
return torch.stack(dec_bboxes), torch.stack(dec_cls)功能
- 堆叠解码器层 :包含多个
DeformableTransformerDecoderLayer,每层通过自注意力和多尺度可变形交叉注意力逐步精炼特征。 - 迭代边界框细化:每一层都输出一个精炼的边界框,下一层以更新后的框作为参考,逐步逼近真实目标。
- 多层预测:在训练时,每一层都会输出类别分数和边界框,并参与损失计算,促进深层监督和更快收敛。
- 推理选择 :通过
eval_idx参数指定在推理时使用哪一层的输出,通常选择最后一层(-1)。
初始化参数
| 参数 | 类型 | 说明 |
|---|---|---|
hidden_dim |
int | 模型的特征维度(与编码器和解码器层一致) |
decoder_layer |
nn.Module | 一个 DeformableTransformerDecoderLayer 实例,将被克隆 num_layers 次 |
num_layers |
int | 解码器的层数 |
eval_idx |
int | 推理时使用的层索引(默认 -1,即最后一层) |
前向方法
-
forward(embed, refer_bbox, feats, shapes, bbox_head, score_head, pos_mlp, attn_mask=None, padding_mask=None):参数 类型 说明 embedtorch.Tensor 解码器初始嵌入 [bs, num_queries, hidden_dim]refer_bboxtorch.Tensor 初始参考框(通常在 [0,1]范围内)[bs, num_queries, 2]featstorch.Tensor 多尺度特征拼接 [bs, total_len, hidden_dim]shapeslist 各层特征图尺寸 [(H0,W0), ...]bbox_headnn.Module 边界框预测头(通常是 nn.ModuleList,每层一个)score_headnn.Module 分类预测头( nn.ModuleList,每层一个)pos_mlpnn.Module 位置编码 MLP,输入参考框,输出位置嵌入 attn_masktorch.Tensor, optional 自注意力掩码 padding_masktorch.Tensor, optional 特征填充掩码 输出:
dec_bboxes:所有层的边界框预测堆叠[num_layers, bs, num_queries, 4](训练)或单层[1, bs, num_queries, 4](推理)。dec_cls:所有层的分类分数堆叠[num_layers, bs, num_queries, num_classes](训练)或单层[1, bs, num_queries, num_classes](推理)。
使用示例
python
if __name__ == '__main__':
# 参数设置
bs, num_query, hidden_dim = 2, 100, 256
n_heads, d_ffn, dropout = 8, 1024, 0.1
n_levels, n_points, num_layers = 4, 4, 6
num_classes = 80
# 构建单个解码器层
decoder_layer = DeformableTransformerDecoderLayer(
d_model=hidden_dim,
n_heads=n_heads,
d_ffn=d_ffn,
dropout=dropout,
n_levels=n_levels,
n_points=n_points,
)
# 构建完整解码器
decoder = DeformableTransformerDecoder(
hidden_dim=hidden_dim,
decoder_layer=decoder_layer,
num_layers=num_layers,
eval_idx=-1,
)
# 模拟输入:refer_bbox 使用 4 维 (x, y, w, h)
embed = torch.randn(bs, num_query, hidden_dim)
refer_bbox = torch.rand(bs, num_query, 4) # 改为 4 维
# 多尺度特征
shapes = [(32, 32), (16, 16), (8, 8), (4, 4)]
total_len = sum(h * w for h, w in shapes)
feats = torch.randn(bs, total_len, hidden_dim)
# 预测头(每层一个)
bbox_head = nn.ModuleList([nn.Linear(hidden_dim, 4) for _ in range(num_layers)])
score_head = nn.ModuleList([nn.Linear(hidden_dim, num_classes) for _ in range(num_layers)])
# 位置 MLP:输入维度改为 4
pos_mlp = nn.Sequential(
nn.Linear(4, hidden_dim),
nn.ReLU(),
nn.Linear(hidden_dim, hidden_dim)
)
# 前向传播(训练模式)
decoder.train()
dec_bboxes, dec_cls = decoder(embed, refer_bbox, feats, shapes, bbox_head, score_head, pos_mlp)
print("训练时边界框形状:", dec_bboxes.shape) # [6, 2, 100, 4]
print("训练时分类形状:", dec_cls.shape) # [6, 2, 100, 80]
# 推理模式
decoder.eval()
with torch.no_grad():
dec_bboxes_eval, dec_cls_eval = decoder(embed, refer_bbox, feats, shapes, bbox_head, score_head, pos_mlp)
print("推理时边界框形状:", dec_bboxes_eval.shape) # [1, 2, 100, 4]
print("推理时分类形状:", dec_cls_eval.shape) # [1, 2, 100, 80]输出示例:
训练时边界框形状: torch.Size([6, 2, 100, 4])
训练时分类形状: torch.Size([6, 2, 100, 80])
推理时边界框形状: torch.Size([1, 2, 100, 4])
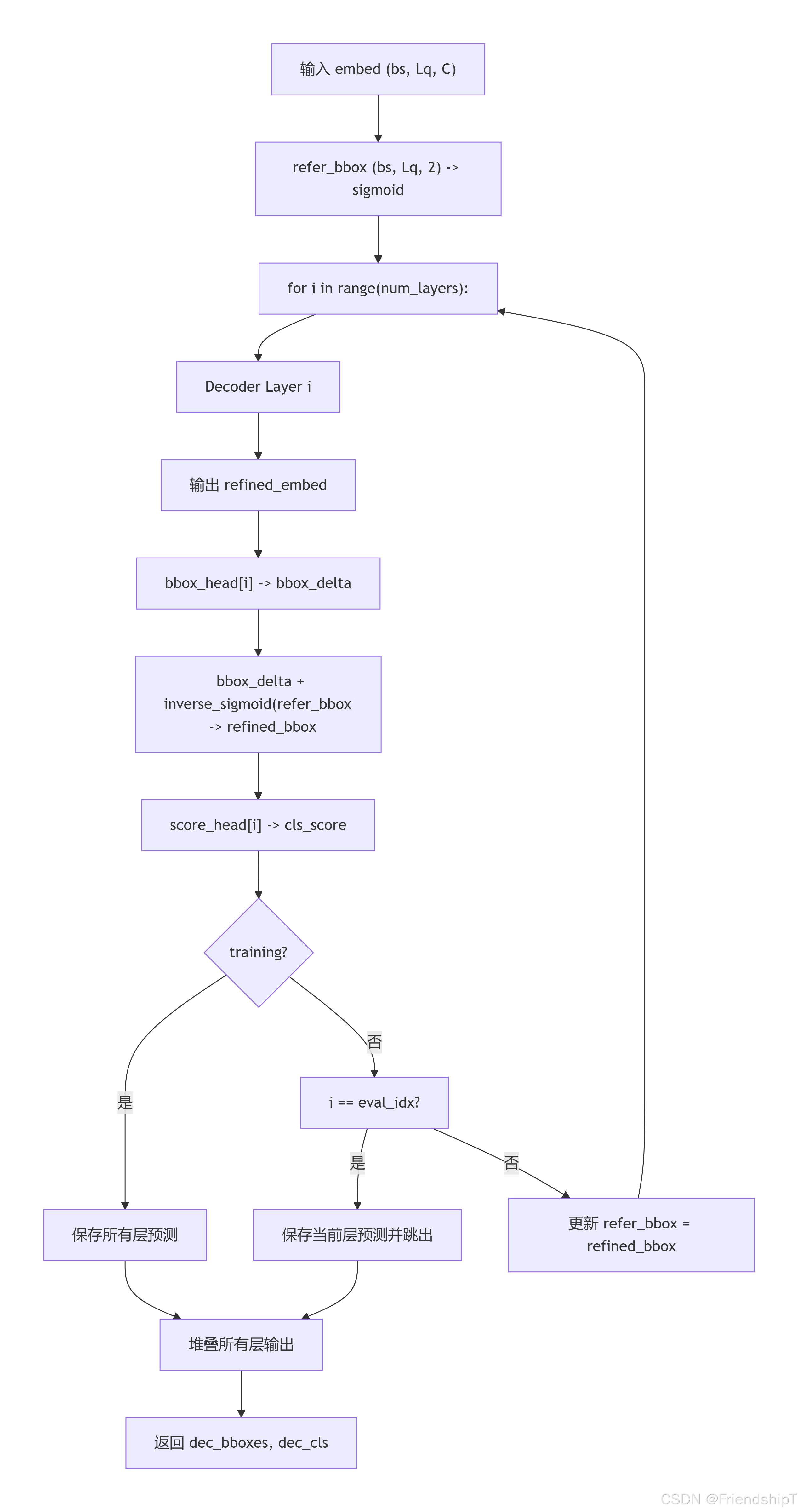
推理时分类形状: torch.Size([1, 2, 100, 80])流程示意图
代码解读
_get_clones 辅助函数
- 使用
copy.deepcopy克隆给定的模块n次,返回nn.ModuleList。确保每层具有独立的参数,即使结构相同。
__init__ 方法
- 调用
_get_clones创建num_layers个decoder_layer实例。 - 存储
hidden_dim、num_layers和eval_idx。若eval_idx为负,转换为正索引(num_layers + eval_idx)。
forward 方法
- 初始化 :
output = embed,refer_bbox = refer_bbox.sigmoid()确保参考框在[0,1]内。 - 迭代层 :
- 对第
i层,调用layer(output, refer_bbox, feats, shapes, padding_mask, attn_mask, pos_mlp(refer_bbox)),其中pos_mlp(refer_bbox)生成位置嵌入。 - 更新
output为当前层的输出。 - 预测边界框增量:
bbox = bbox_head[i](output)。 - 计算精炼框:
refined_bbox = sigmoid(bbox + inverse_sigmoid(refer_bbox))。其中inverse_sigmoid是logit函数,将refer_bbox映射到实数域,使得回归更稳定(需额外实现,但此处未定义,实际代码需提供)。 - 分类分数:
score = score_head[i](output)。
- 对第
- 训练与推理分支 :
- 训练 :保存所有层的
score和refined_bbox(第一层使用refined_bbox,后续层使用bbox + inverse_sigmoid(last_refined_bbox)后再 sigmoid)。 - 推理 :只保存
eval_idx指定的层,并跳出循环。
- 训练 :保存所有层的
- 更新参考框 :
last_refined_bbox = refined_bbox,并根据training模式决定是否detach()(训练时停止梯度,防止细化循环中的梯度干扰)。 - 返回 :将
dec_bboxes和dec_cls列表堆叠为张量。
注意 :代码中使用了 inverse_sigmoid 但未导入,实际使用时需定义:def inverse_sigmoid(x): return torch.log(x / (1 - x + 1e-8))。
注意事项
- 迭代细化 :参考框在各层之间传递并不断精炼,训练时需小心梯度传播(通常只在最后一层回传,或使用
detach控制)。 inverse_sigmoid函数:需自行实现,避免数值不稳定(添加小常数防止除以零)。- 预测头数量 :
bbox_head和score_head必须是num_layers个,每层共享或独立均可。 - 训练与推理行为:训练时输出所有层,可用于辅助损失;推理时仅输出指定层,节省计算。
- 位置编码 :
pos_mlp将参考框映射为位置嵌入,通常为 2 层 MLP,是可学习的。 - 掩码传递 :
attn_mask和padding_mask传递给每层,注意形状匹配。
优缺点
优点
- 多层精炼:通过迭代边界框细化,逐步提升定位精度,提高检测性能。
- 深层监督:训练时每层都提供预测损失,加速收敛并缓解梯度消失。
- 灵活推理:可选择任意层的输出,便于在精度和速度间权衡。
- 即插即用:可替换标准 Transformer 解码器,只需配合可变形注意力层。
缺点
- 实现复杂 :需配合
inverse_sigmoid和位置 MLP,代码依赖较多。 - 训练开销:训练时需计算所有层的损失,增加显存和计算量。
- 参数量大:每层都有独立的预测头和层参数,模型体积较大。
- 调参敏感 :迭代细化的学习率、
eval_idx等需仔细调节。
在 Deformable-DETR 和 RT-DETR 中,DeformableTransformerDecoder 是解码器的标准实现。使用时建议采用预训练权重,并设置合适的 eval_idx(通常为 -1),训练时注意梯度截断和损失权重分配。
参考文献
1 https://docs.ultralytics.com/
2 https://github.com/ultralytics/ultralytics.git
- 由于本人水平有限,难免出现错漏,敬请批评改正。
- 更多精彩内容,可点击进入Python日常小操作专栏、OpenCV-Python小应用专栏、YOLO系列专栏、自然语言处理专栏、人工智能混合编程实践专栏或我的个人主页查看
- YOLOs-CPP:一个免费开源的YOLO全系列C++推理库(以YOLO26为例)
- PaddleOCR:Win10上安装使用PPOCRLabel标注工具
- 目标检测:使用自己的数据集微调DEIMv2进行物体检测
- 图像分割:PyTorch从零开始实现SegFormer语义分割
- 图像超分:使用自己的数据集微调Real-ESRGAN-x4plus进行超分重建
- 图像生成:PyTorch从零开始实现一个简单的扩散模型
- Stable Diffusion:使用自己的数据集微调 Stable Diffusion 3.5 LoRA 文生图模型
- 图像超分:使用自己的数据集微调Real-ESRGAN-x2plus进行超分重建
- Anomalib:使用Anomalib 2.1.0训练自己的数据集进行异常检测
- Anomalib:在Linux服务器上安装使用Anomalib 2.1.0
- 人工智能混合编程实践:C++调用封装好的DLL进行异常检测推理
- 人工智能混合编程实践:C++调用封装好的DLL进行FP16图像超分重建(v3.0)
- 隔离系统Python:源码编译3.11.8到自定义目录(含PGO性能优化)
- 在线机的Python环境迁移到离线机上
- Nuitka 将 Python 脚本封装为 .pyd 或 .so 文件
- Ultralytics:使用 YOLO11 进行速度估计
- Ultralytics:使用 YOLO11 进行物体追踪
- Ultralytics:使用 YOLO11 进行物体计数
- Ultralytics:使用 YOLO11 进行目标打码
- 人工智能混合编程实践:C++调用Python ONNX进行YOLOv8推理
- 人工智能混合编程实践:C++调用封装好的DLL进行YOLOv8实例分割
- 人工智能混合编程实践:C++调用Python ONNX进行图像超分重建
- 人工智能混合编程实践:C++调用Python AgentOCR进行文本识别
- 通过计算实例简单地理解PatchCore异常检测
- Python将YOLO格式实例分割数据集转换为COCO格式实例分割数据集
- YOLOv8 Ultralytics:使用Ultralytics框架训练RT-DETR实时目标检测模型
- 基于DETR的人脸伪装检测
- YOLOv7训练自己的数据集(口罩检测)
- YOLOv8训练自己的数据集(足球检测)
- YOLOv5:TensorRT加速YOLOv5模型推理
- YOLOv5:IoU、GIoU、DIoU、CIoU、EIoU
- 玩转Jetson Nano(五):TensorRT加速YOLOv5目标检测
- YOLOv5:添加SE、CBAM、CoordAtt、ECA注意力机制
- YOLOv5:yolov5s.yaml配置文件解读、增加小目标检测层
- Python将COCO格式实例分割数据集转换为YOLO格式实例分割数据集
- YOLOv5:使用7.0版本训练自己的实例分割模型(车辆、行人、路标、车道线等实例分割)
- 使用Kaggle GPU资源免费体验Stable Diffusion开源项目
- Stable Diffusion:在服务器上部署使用Stable Diffusion WebUI进行AI绘图(v2.0)
- Stable Diffusion:使用自己的数据集微调训练LoRA模型(v2.0)