卡尔曼滤波辅助分布式OTFS-ISAC节点部署:面向通感一体化的几何优化设计
一、论文基础信息
原文标题 :Kalman Filtering-Assisted Node Deployment for Distributed OTFS-ISAC: A Geometry-Aware Design for the Joint Sensing and Communication
作者 :Jyotsna Rani, Kuntal Deka, Ganesh Prasad, Zilong Liu
期刊预印本 :arXiv:2509.16700v1
二、论文摘要
通感一体化(ISAC)作为下一代无线网络核心支撑技术,能够同时实现频谱高效利用与硬件架构简化。传统单站式通感一体化方案虽研究成熟,但观测维度单一、空间分集能力薄弱,在高速移动场景下目标跟踪可靠性大幅下降。分布式通感一体化通过多节点协同工作弥补该缺陷,但主流 OFDM 波形对多普勒频偏、多径衰落极度敏感,难以适配高动态车载通信环境。
正交时频空(OTFS)调制将信号映射至时延 - 多普勒域,信道具备稀疏稳定特性,可同时实现高可靠通信与高精度感知。基于此,本文将 OTFS 调制拓展至分布式通感一体化系统,针对目前研究较少的空间节点部署优化问题展开深入研究。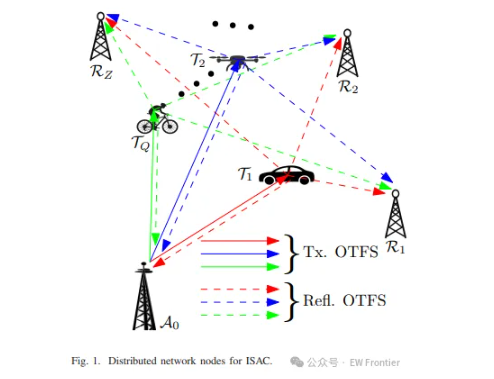
-
提出基于三角定位的分布式节点部署框架,利用空间分集提升目标定位、速度估计精度与通信可达速率,从理论推导部署几何结构对估计误差的约束关系;
-
将卡尔曼滤波(KF)融合至分布式 OTFS-ISAC 架构,分别设计主动感知、无源感知、通感协同三类跟踪算法,优化移动目标状态追踪效果;
-
推导通用拓扑下定位误差协方差迹、最大特征值闭式解析解,证明接收节点沿正交坐标轴布设可实现近最优部署;
-
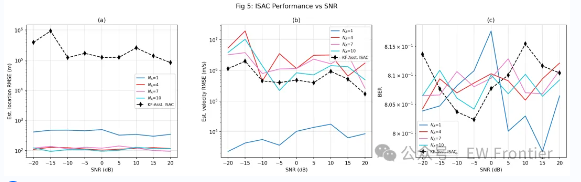
大量数值仿真验证:本文框架可显著降低定位均方根误差(RMSE)与通信误码率(BER),清晰量化感知精度与通信可靠性之间的性能权衡。
本文成果证明,融合卡尔曼滤波的节点几何优化部署方案,能够让分布式 OTFS 通感一体化系统在高速动态无线场景下实现高性能、高稳定运行。
三、研究背景与引言
3.1 研究大背景
车载网络向自动驾驶、智能交通快速演进,行业对 "高可靠通信 + 实时环境感知" 一体化技术需求爆发。通感一体化(ISAC)将通信、雷达感知硬件与频谱资源统一复用,兼顾频谱效率与设备轻量化,是解决该需求的核心方案。
传统 OFDM 波形在高速移动场景存在致命短板:多普勒频偏、多径衰落会严重劣化通信与感知性能。而 OTFS 调制在时延 - 多普勒域处理信号,信道稀疏稳定,天然适配车载高动态环境,可同时完成高精度雷达探测与稳定数据传输。
但 OTFS 通感一体化落地仍存在多重挑战:移动车辆持续跟踪、强多普勒信道下通信稳定性、多目标速度高精度估计、多径环境精准定位;同时单中心节点覆盖范围有限,大规模天线阵列硬件、计算成本过高。分布式通感一体化采用多低复杂度节点协同,可扩大覆盖、协同感知、降低单节点成本,完美解决上述痛点。本文结合卡尔曼滤波,进一步提升分布式 OTFS-ISAC 的通感综合性能。
3.2 现有研究综述
(1)单站式通感一体化
收发共址的单站 ISAC 硬件成本低、频谱利用率高,大量研究结合 MIMO 阵列实现距离、角度、速度联合估计,适配车联网 V2X 标准。但缺陷十分突出:仅单一观测视角,空间分集缺失,高速场景下多普勒与多径会大幅降低目标跟踪稳定性,必须依靠分布式架构优化。
(2)分布式通感一体化
多基站、多车载终端协同分布式 ISAC,依靠空间分集提升定位精度,是弥补单站缺陷的主流方案。现有研究围绕上行协同波形设计、资源分配、时分协同车联网、多点协作(CoMP)多静态雷达展开,通过互信息统一建模通感性能权衡。
但现有分布式 ISAC 几乎全部采用 OFDM 波形,时变信道鲁棒性差,高速场景感知、通信性能衰减严重。
(3)基于 OTFS 的通感一体化
OTFS 凭借时延 - 多普勒域抗多普勒、抗多径优势,成为新一代 ISAC 优选波形。现有研究围绕 DD 域预编码、分数阶时延多普勒估计算法、无蜂窝大规模 MIMO 功率分配、多静态 OTFS 目标关联定位、超分辨测距测速展开,验证了 OTFS 分布式通感一体化的性能优势。
现有研究空白:几乎没有文献结合卡尔曼滤波,研究分布式 OTFS-ISAC 的最优空间节点部署策略,而节点布设直接决定感知覆盖、定位精度与通信质量;同时卡尔曼滤波对移动目标时序跟踪的增益,尚未与节点几何优化结合。
3.3 本文研究动机与核心创新点
现有分布式 OTFS-ISAC 研究集中于波形、资源分配,忽略节点空间部署优化;同时卡尔曼滤波时序跟踪优势未和节点几何拓扑结合。针对该空白,本文提出卡尔曼滤波辅助节点几何优化部署方案,核心创新如下:
-
搭建完整分布式 OTFS-ISAC 系统拓扑,推导 OTFS 发射波形、接收信号处理流程,分别建立主动感知、无源通感协同两套参数估计算法,实现目标距离、径向速度、通信速率联合求解;
-
提出几何三角定位框架,利用多节点空间分集提升目标位置、速度估计精度;通过引理证明:最大化三角覆盖面积可最小化定位误差;推论证明:接收节点沿正交坐标轴布设可获得近最优拓扑;
-
推导随机部署通用拓扑下,目标位置估计协方差迹、最大特征值闭式表达式;证明多天线正交轴节点部署可将定位误差降低至单天线方案的 1 / N 3 1/N^3 1/N3(N 为单节点独立天线数);
-
基于相关随机游走(CRW)连续运动模型,离散化后设计三类卡尔曼滤波算法:KF 主动感知优化、KF 无源通感协同算法,完整分析三类算法时间复杂度;
-
大规模数值仿真:对比有无卡尔曼滤波、随机 / 最优节点部署、不同天线数量、不同信噪比下的定位 RMSE、速度 RMSE、通信 BER,量化感知 - 通信性能权衡。
四、核心方法与原理
4.1 系统整体架构
系统由 1 个锚节点 A 0 A_0 A0(发射端)+ Z 个分布式接收节点 R 1 , . . . , R Z {R_1,...,R_Z} R1,...,RZ组成,支持主动感知 、无源通感协同两种工作模式,同时兼容单站感知(锚节点自回波探测)、双站感知(锚发射、接收节点采集目标反射信号)。
-
主动感知:锚节点发射已知探测信号,所有接收节点利用完整波形完成双站协同感知;
-
无源感知:锚节点仅传输业务通信数据,接收端仅已知导频,同步完成通信解调与环境感知,无额外探测信号,节能且无额外干扰。
信道采用双扩展时频弥散信道,全部信号基于 OTFS 调制传输。
4.2 OTFS 信号收发原理
(1)发射端 OTFS 信号构造
-
QAM 信息符号向量重塑为时延 - 多普勒二维矩阵 D I D_I DI, M M M为时延区间数量、 N N N为多普勒区间数量;
-
插入单峰导频矩阵 D P D_P DP,叠加得到通感一体化 DD 域矩阵 D = D I + D P D=D_I+D_P D=DI+DP;
-
通过逆辛有限傅里叶变换(ISFFT)转换至时频域,脉冲成形滤波后生成时域发射信号;
-
信号维度与时延 / 多普勒分辨率绑定:带宽 M Δ f M\Delta f MΔf、帧时长 N T NT NT,时延分辨率 1 / M Δ f 1/M\Delta f 1/MΔf,多普勒分辨率 1 / N T 1/NT 1/NT。
(2)接收端信号处理
接收信号为多径信道叠加高斯噪声,每条路径引入独立信道增益、循环时延、多普勒偏移。接收端执行发射逆操作:时域信号恢复为 DD 域矩阵,分离多径分量,得到 DD 域接收向量,用于后续信道、目标参数估计。
4.3 两种感知工作模式算法
(1)主动感知参数估计算法
发射完整数据波形接收端全部已知,构建最大似然估计最小二乘代价函数,采用串行多径估计算法:
-
二维时延 - 多普勒网格互相关搜索,提取最强路径时延、多普勒;
-
闭式求解对应路径信道复增益;
-
从接收信号中抵消已估计路径分量,迭代估计剩余多径;
-
通过时延、多普勒换算目标距离、径向速度;
复杂度:单接收机单路径 O ( G τ G ν M N ) O(G_\tau G_\nu MN) O(GτGνMN),整体复杂度随节点数、路径数线性增长。
(2)无源通感协同迭代算法
接收端仅已知导频,信息数据为干扰,采用内外双层迭代优化:
-
外层迭代:交替执行通信数据解调、信道参数精细化感知;
-
内层梯度下降迭代:正则化 MMSE 准则解调通信符号,设置收敛阈值停止迭代;
-
解调后的完整 DD 域信号(数据 + 导频)用于重新高精度估计时延、多普勒、信道增益;
-
信道参数收敛后输出通信比特与目标距离、速度;
优势:无需专用探测波形,通信感知并行执行,适合低功耗终端。
4.4 多节点协同三角定位与测速
利用锚节点 + 双接收节点构成三角形,基于多站测得距离构建线性方程组,求解目标二维坐标;利用各节点径向速度观测值,构建速度投影矩阵求解目标真实二维速度。
-
多三角观测融合方案:所有节点配对三角估计结果算术平均,抑制随机噪声;
-
近邻筛选优化:剔除几何畸变(三点近似共线、基线过近)带来的异常估计值,仅保留空间一致性高的观测结果平均,大幅降低粗差干扰。
4.5 节点几何部署最优理论(核心几何引理)
-
引理 1:目标定位估计协方差迹、最大特征值由锚节点 + 双接收节点构成三角形面积决定,最大化三角形面积可最小化定位误差;
-
推论 1:接收节点分别布设至 X、Y 正交坐标轴,限定区域内最大化直角三角形面积,即可实现近最优部署;
-
引理 4 :锚节点、两个正交轴接收节点均配置 N 根独立天线时,定位估计误差可降低至原方案的 1 / N 3 1/N^3 1/N3,天线数量提升对精度增益呈三次方增长。
4.6 CRW 相关随机游走卡尔曼滤波跟踪算法
针对车辆、无人机平滑连续运动特性,采用 Ornstein-Uhlenbeck 过程构建连续相关随机游走(CRW)运动模型,离散化后搭建卡尔曼滤波时序跟踪框架:
-
目标状态向量: S t = 横坐标 , 纵坐标 , X 向速度 , Y 向速度 T S_t=横坐标,纵坐标,X向速度,Y向速度^T St=横坐标,纵坐标,X向速度,Y向速度T;
-
状态预测:基于历史位置、速度迭代预测下一时刻目标状态;
-
测量更新:将三角定位得到的目标位置、速度作为观测值,通过卡尔曼增益修正预测值;
-
三套完整 KF 算法:
-
算法 1:基础卡尔曼滤波通用迭代函数;
-
算法 2:KF 增强主动感知,时序平滑消除单次感知噪声;
-
算法 3:KF 增强无源通感协同,迭代解调 + 时序跟踪一体化;
卡尔曼滤波核心增益:平衡测量噪声与运动预测噪声,避免瞬时异常观测导致跟踪跳变,持续平滑目标轨迹。
-
五、仿真结果与结论
5.1 仿真核心参数
载波 30GHz 毫米波,OTFS 参数 M=256 时延格、N=16 多普勒格,4QAM 调制,方形 400m 测试区域,4 个移动目标,单节点天线数量 1~10 可调,信噪比 - 20dB~20dB。
5.2 关键仿真结论
-
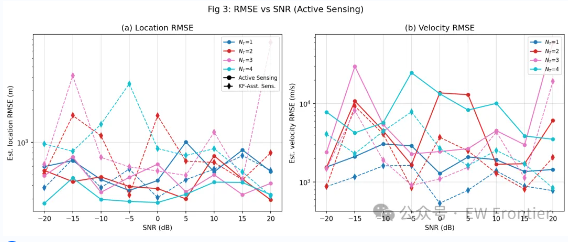
卡尔曼滤波对感知精度提升显著
无 KF 主动感知在 0dB 信噪比下,定位 RMSE 均值 25.06m、速度 RMSE31.63m/s;引入 KF 后分别降至 19.76m、25.46m/s。信噪比越低、目标数量越多,KF 误差抑制效果越明显。
-
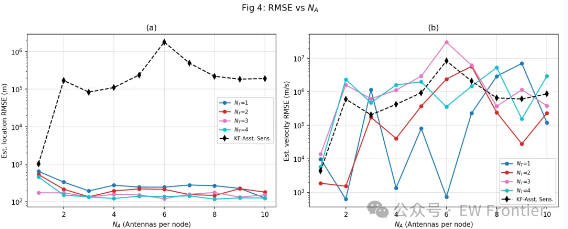
正交轴多天线部署精度呈三次方提升
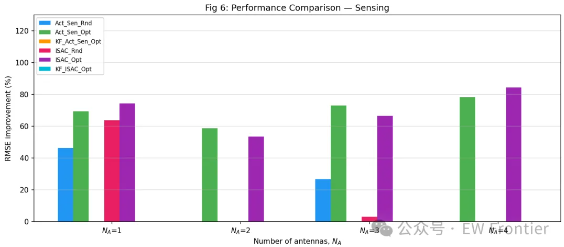
单天线定位 RMSE 约 3.53m,单节点 10 天线时定位 RMSE 低至 0.23m;天线数量提升,误差按 1 / N 3 1/N^3 1/N3快速衰减,正交最优部署性能远优于随机布设。
-
主动感知性能优于无源通感一体化
主动感知收发端完整波形已知,时延多普勒估计精度更高;无源仅依靠导频迭代解调,存在固有估计损耗,同等天线、信噪比下定位误差高于主动感知。
-
最优几何部署 + KF 联合优化通信误码
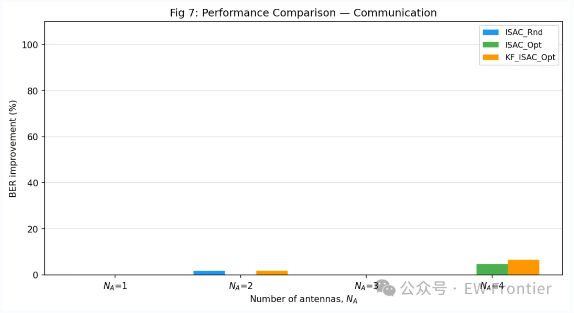
8dB 信噪比下,对比现有文献基准方案:随机部署 ISAC BER 改善 64.41%,正交最优部署 ISAC 改善 79.91%;KF 辅助正交最优 ISAC 误码改善高达 87.37%;天线数量越多,本方案相对优势越大。
-
节点部署几何的决定性作用
随机布设接收节点会形成大量窄小三角观测区,定位误差大幅抬升;沿正交坐标轴最大化三角覆盖面积,可从几何底层降低估计下界,是低成本提升通感性能的关键手段。
5.3 全文总结
-
本文搭建了一套完整卡尔曼滤波辅助几何优化分布式 OTFS-ISAC框架,完整覆盖 OTFS 信号收发、主动 / 无源感知、多节点三角协同定位、CRW-KF 时序跟踪全流程;
-
从几何理论证明:接收节点沿正交坐标轴布设、最大化三角观测面积是近最优部署方案,多天线配置可三次方量级降低定位误差;
-
设计三类卡尔曼滤波迭代算法,分别适配主动感知、无源通感协同场景,通过时序平滑有效抑制瞬时感知噪声,同步优化定位测速精度与通信误码率;
-
数值仿真验证:正交最优节点部署融合卡尔曼滤波,相比随机部署、无 KF 基准方案,同时实现更低定位 RMSE 与 BER,在高速车载、高多普勒动态场景具备极强实用性;
-
研究价值:填补了分布式 OTFS 通感一体化 "节点几何部署 + 时序跟踪滤波" 联合优化的研究空白,为自动驾驶车联网、毫米波分布式雷达通感一体化网络提供低复杂度、高性能工程设计思路。
六、文末科普小结
很多人会疑惑:为什么同样是通感一体化,OTFS + 分布式多节点 + 卡尔曼滤波这套方案更适合自动驾驶?
-
OFDM 怕高速移动带来的多普勒频偏,车辆快速行驶时雷达探测、通信传输双双拉胯,而 OTFS 在时延多普勒域处理信号,天生抗高速;
-
单基站雷达只能从一个角度观测车辆,遮挡、多径环境下容易丢失目标,多分布式节点协同三角定位,多视角融合鲁棒性更强;
-
节点随便摆放效果很差,论文从数学上证明,把接收节点放在横竖正交两个方向,观测三角形面积最大,定位误差直接大幅下降;
-
单次雷达观测容易受噪声干扰出现跳变,卡尔曼滤波结合车辆连续运动规律,平滑轨迹,持续稳定跟踪移动车辆;
整套方案无需大幅增加硬件成本,仅通过节点摆放优化 + 后端时序滤波算法,同时提升自动驾驶的车车通信、环境雷达探测两大核心能力,是下一代智能交通毫米波网络的可行落地方案。