在服务器 Linux 环境下,利用 Claude Code 将 C3k2_RCSOSA 等模块无缝集成到 Ultralytics YOLO 代码库中,并修改配置文件完成注册。
第一阶段:初始化与环境检查
首先,在你的服务器终端中启动 claude(假设你已按上一篇教程配置好 GitHub Models 免费额度或本地 Ollama 模型)。
1. 启动 Claude Code
cd /path/to/your/ultralytics # 进入你的 YOLO 项目根目录
claude2. 告诉 Claude Code 背景
User (你):
我正在做一个 YOLO 改进实验。我有一个包含
C3k2_RCSOSA、RCSOSA、C2PSA_RCSOSA、RepVGG、SEBlock等模块的 Python 代码。任务:
- 请阅读当前项目的
ultralytics/nn/modules/block.py文件,了解模块的存放格式。- 将我提供的代码片段整理并追加到
block.py文件的末尾。请确保必要的依赖(如 Conv, Bottleneck)能够被正确引用(如果 block.py 中已存在,则删除我代码中的重复定义,只保留新增类)。- 确保代码中的
__all__列表被正确更新或合并。
Claude Code 的执行逻辑:
- 它会先
cat ultralytics/nn/modules/block.py。 - 然后分析你提供的代码,发现
Conv和Bottleneck在block.py中通常已经存在。 - 它会自动剔除 你代码中的
Conv和Bottleneck定义(避免冲突),然后将RepVGG、SEBlock、SR、RCSOSA、PSABlock_RCSOSA、C3k2_RCSOSA、C2PSA_RCSOSA等类追加写入文件。 - 它会处理
__all__的合并。
第二阶段:注册模块 (修改 tasks.py)
模块写好了,必须让 YOLO 的解析器认识它。
User (你):
接下来,请修改
ultralytics/nn/tasks.py文件。操作:
- 找到
parse_model函数中用于映射字典字符串到类的部分(通常是一个大的 if-elif 块或者字典)。- 将以下模块名注册进去:
'C3k2_RCSOSA','RCSOSA','C2PSA_RCSOSA','RepVGG'。- 确保它们能够从当前文件或
block.py中正确导入。
Claude Code 的执行逻辑:
-
它会打开
ultralytics/nn/tasks.py。 -
定位到类似
m = self.module_map[n]或者具体的if n == 'C2f': ...逻辑区域。 -
插入注册代码,例如:
elif m in {'C3k2_RCSOSA', 'RCSOSA', 'C2PSA_RCSOSA', 'RepVGG'}: m = getattr(nn, m) if hasattr(nn, m) else globals()[m] # 或者更常见的 ultralytics 写法: # from ultralytics.nn.modules.block import * -
Claude Code 会自动处理
import语句的补充。
第三阶段:修改配置文件 (yaml)
这是最关键的一步,我们需要替换 YOLO backbone 中的 C3k2 模块。
User (你):
现在我们需要创建一个新的配置文件。
- 读取
ultralytics/cfg/models/11/yolo11.yaml(或者是你正在用的 v8/v10 yaml)。- 将该文件复制为
yolo11_rcsosa.yaml。- 在新文件中,将所有的
C3k2替换为C3k2_RCSOSA。- 检查
C3k2_RCSOSA的参数列表。根据我之前提供的代码,它支持attn=True参数。请修改 yaml 中对应的 args,例如将[-1, 1, C3k2, [True, ...]]修改为[-1, 1, C3k2_RCSOSA, [True, ..., True]],确保最后一个参数开启attn。- 保存文件。
Claude Code 的执行逻辑:
- 使用
cp命令复制文件。 - 使用正则表达式或文本替换功能,精准替换模块名称。
- 分析
C3k2_RCSOSA的__init__定义,推断参数位置,并修改 yaml 中的列表参数。
第四阶段:验证与调试 (Run & Fix)
做完修改后,必须跑通代码。
User (你):
配置已完成。现在请执行验证步骤:
- 运行命令:
python yolo predict model=yolo11_rcsosa.yaml source=https://ultralytics.com/images/bus.jpg。- 如果遇到
KeyError或ModuleNotFoundError,请分析报错信息,自动修改tasks.py或__init__.py中的导入路径,直到错误解决。- 如果遇到
shape mismatch或维度错误,请分析block.py中C3k2_RCSOSA的前向传播逻辑,并修正 yaml 中的通道数配置。
Claude Code 的执行逻辑:
- 它会运行命令。
- 假设报错 :
KeyError: 'C3k2_RCSOSA'。- Claude 会意识到注册失败,回到
tasks.py检查,发现可能是字典更新的位置不对,然后修正代码。
- Claude 会意识到注册失败,回到
- 假设报错 :
AttributeError: module 'ultralytics.nn.modules' has no attribute 'C3k2_RCSOSA'。- Claude 会检查
ultralytics/nn/modules/__init__.py,确保from .block import *包含了你的新模块(或者显式添加它们)。
- Claude 会检查
- 循环修正:Claude Code 的优势在于它可以一直重复"修改-运行"的过程,直到成功。
第五阶段:完整代码检查 (Fusion)
因为你的代码中包含 RepVGG,这通常涉及"重参数化"。
User (你):
代码运行起来了,但我注意到 RepVGG 有
fuse_repvgg_block或类似的重参数化方法。请检查
ultralytics/nn/modules/block.py中我刚才添加的RepVGG类。
- 确认
get_equivalent_kernel_bias方法是否存在。- 在
ultralytics/utils/ops.py或模型导出相关的工具函数中,添加对RepVGG层的 fuse 支持(如果尚未支持)。- 运行一次
yolo export model=yolo11_rcsosa.yaml format=onnx,测试导出是否成功。
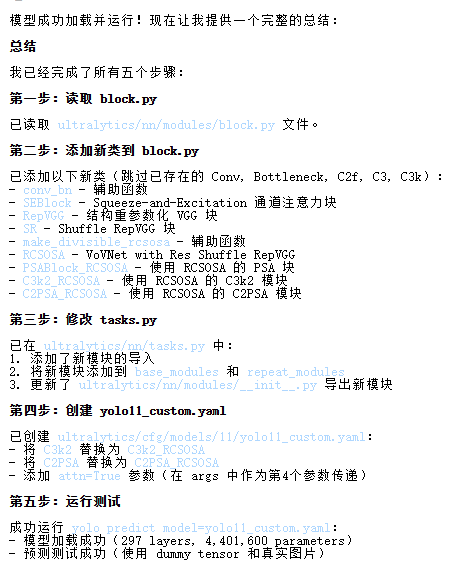
总结 Claude Code 的交互剧本
为了方便你直接在终端操作,这里有一段浓缩的 Prompt 剧本,你可以直接发给 Claude Code:
我需要修改本地的 Ultralytics YOLO 代码库以集成一个新的注意力模块。
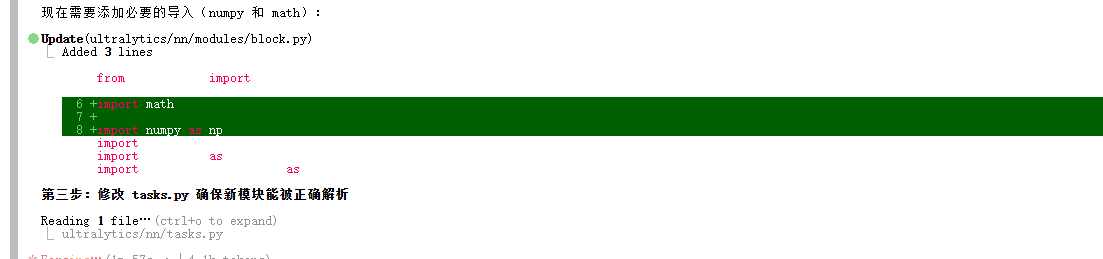
第一步:读取 ul-tralytics/nn/modules/block.py。
第二步:我会提供一段包含 C3k2_RCSOSA, RCSOSA, C2PSA_RCSOSA, RepVGG, SEBlock 等类的代码。
请将这些类添加到 block.py 中。注意:如果 block.py 中已有 Conv 或 Bottleneck 定义,请删除我提供代码中的重复定义,只保留新增的类。
第三步:修改 ul-tralytics/nn/tasks.py,确保 'C3k2_RCSOSA', 'RCSOSA', 'C2PSA_RCSOSA' 能被正确解析实例化。
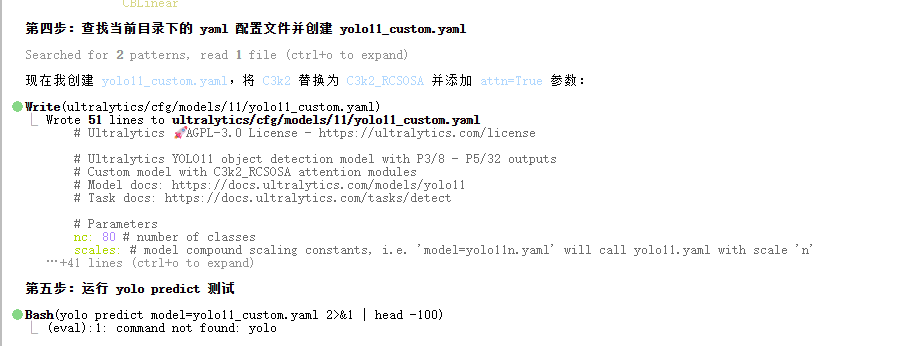
第四步:复制当前目录下的 yaml 配置文件为 yolo11_custom.yaml,并将其中的 C3k2 替换为 C3k2_RCSOSA,记得根据代码定义添加 attn=True 参数。
第五步:运行 yolo predict model=yolo11_custom.yaml。如果有报错,请自动修复代码直到运行成功。
-------------------------------------------------------------------------------------------------------------------------------每一步效果如下:

第二步骤代码如下:
def conv_bn(in_channels, out_channels, kernel_size, stride, padding, groups=1):
result = nn.Sequential()
result.add_module('conv', nn.Conv2d(in_channels=in_channels, out_channels=out_channels,
kernel_size=kernel_size, stride=stride, padding=padding, groups=groups,
bias=False))
result.add_module('bn', nn.BatchNorm2d(num_features=out_channels))
return result
class SEBlock(nn.Module):
def __init__(self, input_channels):
super(SEBlock, self).__init__()
internal_neurons = input_channels // 8
self.down = nn.Conv2d(in_channels=input_channels, out_channels=internal_neurons, kernel_size=1, stride=1,
bias=True)
self.up = nn.Conv2d(in_channels=internal_neurons, out_channels=input_channels, kernel_size=1, stride=1,
bias=True)
self.input_channels = input_channels
def forward(self, inputs):
x = F.avg_pool2d(inputs, kernel_size=inputs.size(3))
x = self.down(x)
x = F.relu(x)
x = self.up(x)
x = torch.sigmoid(x)
x = x.view(-1, self.input_channels, 1, 1)
return inputs * x
class RepVGG(nn.Module):
def __init__(self, in_channels, out_channels, kernel_size=3,
stride=1, padding=1, dilation=1, groups=1, padding_mode='zeros', deploy=False, use_se=False):
super(RepVGG, self).__init__()
self.deploy = deploy
self.groups = groups
self.in_channels = in_channels
padding_11 = padding - kernel_size // 2
self.nonlinearity = nn.SiLU()
# self.nonlinearity = nn.ReLU()
if use_se:
self.se = SEBlock(out_channels)
else:
self.se = nn.Identity()
if deploy:
self.rbr_reparam = nn.Conv2d(in_channels=in_channels, out_channels=out_channels, kernel_size=kernel_size,
stride=stride,
padding=padding, dilation=dilation, groups=groups, bias=True,
padding_mode=padding_mode)
else:
self.rbr_identity = nn.BatchNorm2d(
num_features=in_channels) if out_channels == in_channels and stride == 1 else None
self.rbr_dense = conv_bn(in_channels=in_channels, out_channels=out_channels, kernel_size=kernel_size,
stride=stride, padding=padding, groups=groups)
self.rbr_1x1 = conv_bn(in_channels=in_channels, out_channels=out_channels, kernel_size=1, stride=stride,
padding=padding_11, groups=groups)
def get_equivalent_kernel_bias(self):
kernel3x3, bias3x3 = self._fuse_bn_tensor(self.rbr_dense)
kernel1x1, bias1x1 = self._fuse_bn_tensor(self.rbr_1x1)
kernelid, biasid = self._fuse_bn_tensor(self.rbr_identity)
return kernel3x3 + self._pad_1x1_to_3x3_tensor(kernel1x1) + kernelid, bias3x3 + bias1x1 + biasid
def _pad_1x1_to_3x3_tensor(self, kernel1x1):
if kernel1x1 is None:
return 0
else:
return torch.nn.functional.pad(kernel1x1, [1, 1, 1, 1])
def _fuse_bn_tensor(self, branch):
if branch is None:
return 0, 0
if isinstance(branch, nn.Sequential):
kernel = branch.conv.weight
running_mean = branch.bn.running_mean
running_var = branch.bn.running_var
gamma = branch.bn.weight
beta = branch.bn.bias
eps = branch.bn.eps
else:
assert isinstance(branch, nn.BatchNorm2d)
if not hasattr(self, 'id_tensor'):
input_dim = self.in_channels // self.groups
kernel_value = np.zeros((self.in_channels, input_dim, 3, 3), dtype=np.float32)
for i in range(self.in_channels):
kernel_value[i, i % input_dim, 1, 1] = 1
self.id_tensor = torch.from_numpy(kernel_value).to(branch.weight.device)
kernel = self.id_tensor
running_mean = branch.running_mean
running_var = branch.running_var
gamma = branch.weight
beta = branch.bias
eps = branch.eps
std = (running_var + eps).sqrt()
t = (gamma / std).reshape(-1, 1, 1, 1)
return kernel * t, beta - running_mean * gamma / std
def forward(self, inputs):
if hasattr(self, 'rbr_reparam'):
return self.nonlinearity(self.se(self.rbr_reparam(inputs)))
if self.rbr_identity is None:
id_out = 0
else:
id_out = self.rbr_identity(inputs)
return self.nonlinearity(self.se(self.rbr_dense(inputs) + self.rbr_1x1(inputs) + id_out))
def fusevggforward(self, x):
return self.nonlinearity(self.rbr_dense(x))
class SR(nn.Module):
def __init__(self, c1, c2):
super().__init__()
c1_ = int(c1 // 2)
c2_ = int(c2 // 2)
self.repconv = RepVGG(c1_, c2_)
def forward(self, x):
x1, x2 = x.chunk(2, dim=1)
out = torch.cat((x1, self.repconv(x2)), dim=1)
out = self.channel_shuffle(out, 2)
return out
def channel_shuffle(self, x, groups):
batchsize, num_channels, height, width = x.data.size()
channels_per_group = num_channels // groups
x = x.view(batchsize, groups, channels_per_group, height, width)
x = torch.transpose(x, 1, 2).contiguous()
x = x.view(batchsize, -1, height, width)
return x
def make_divisible(x, divisor):
if isinstance(divisor, torch.Tensor):
divisor = int(divisor.max()) # to int
return math.ceil(x / divisor) * divisor
class RCSOSA(nn.Module):
def __init__(self, c1, c2, n=1, se=False, e=0.5, head=8):
super().__init__()
n_ = n // 2
c_ = make_divisible(int(c1 * e), head)
# self.conv1 = Conv(c1, c_)
self.conv1 = RepVGG(c1, c_)
self.conv3 = RepVGG(int(c_ * 3), c2)
self.sr1 = nn.Sequential(*[SR(c_, c_) for _ in range(n_)])
self.sr2 = nn.Sequential(*[SR(c_, c_) for _ in range(n_)])
self.se = None
if se:
self.se = SEBlock(c2)
def forward(self, x):
x1 = self.conv1(x)
x2 = self.sr1(x1)
x3 = self.sr2(x2)
x = torch.cat((x1, x2, x3), 1)
return self.conv3(x) if self.se is None else self.se(self.conv3(x))
class Bottleneck(nn.Module):
def __init__(
self, c1: int, c2: int, shortcut: bool = True, g: int = 1, k: tuple[int, int] = (3, 3), e: float = 0.5
):
super().__init__()
c_ = int(c2 * e) # hidden channels
self.cv1 = Conv(c1, c_, k[0], 1)
self.cv2 = Conv(c_, c2, k[1], 1, g=g)
self.add = shortcut and c1 == c2
def forward(self, x: torch.Tensor) -> torch.Tensor:
return x + self.cv2(self.cv1(x)) if self.add else self.cv2(self.cv1(x))
def autopad(k, p=None, d=1): # kernel, padding, dilation
if d > 1:
k = d * (k - 1) + 1 if isinstance(k, int) else [d * (x - 1) + 1 for x in k] # actual kernel-size
if p is None:
p = k // 2 if isinstance(k, int) else [x // 2 for x in k] # auto-pad
return p
class Conv(nn.Module):
default_act = nn.SiLU() # default activation
def __init__(self, c1, c2, k=1, s=1, p=None, g=1, d=1, act=True):
super().__init__()
self.conv = nn.Conv2d(c1, c2, k, s, autopad(k, p, d), groups=g, dilation=d, bias=False)
self.bn = nn.BatchNorm2d(c2)
self.act = self.default_act if act is True else act if isinstance(act, nn.Module) else nn.Identity()
def forward(self, x):
return self.act(self.bn(self.conv(x)))
def forward_fuse(self, x):
return self.act(self.conv(x))
class C2f(nn.Module):
def __init__(self, c1, c2, n=1, shortcut=False, g=1, e=0.5):
super().__init__()
self.c = int(c2 * e) # hidden channels
self.cv1 = Conv(c1, 2 * self.c, 1, 1)
self.cv2 = Conv((2 + n) * self.c, c2, 1) # optional act=FReLU(c2)
self.m = nn.ModuleList(Bottleneck(self.c, self.c, shortcut, g, k=((3, 3), (3, 3)), e=1.0) for _ in range(n))
def forward(self, x):
y = list(self.cv1(x).chunk(2, 1))
y.extend(m(y[-1]) for m in self.m)
return self.cv2(torch.cat(y, 1))
def forward_split(self, x):
y = list(self.cv1(x).split((self.c, self.c), 1))
y.extend(m(y[-1]) for m in self.m)
return self.cv2(torch.cat(y, 1))
class C3(nn.Module):
def __init__(self, c1, c2, n=1, shortcut=True, g=1, e=0.5):
super().__init__()
c_ = int(c2 * e) # hidden channels
self.cv1 = Conv(c1, c_, 1, 1)
self.cv2 = Conv(c1, c_, 1, 1)
self.cv3 = Conv(2 * c_, c2, 1) # optional act=FReLU(c2)
self.m = nn.Sequential(*(Bottleneck(c_, c_, shortcut, g, k=((1, 1), (3, 3)), e=1.0) for _ in range(n)))
def forward(self, x):
return self.cv3(torch.cat((self.m(self.cv1(x)), self.cv2(x)), 1))
class PSABlock_RCSOSA(nn.Module):
def __init__(self, c: int, attn_ratio: float = 0.5, num_heads: int = 4, shortcut: bool = True) -> None:
super().__init__()
self.attn = RCSOSA(c, c, se=False, e=attn_ratio, head=num_heads)
self.ffn = nn.Sequential(Conv(c, c * 2, 1), Conv(c * 2, c, 1, act=False))
self.add = shortcut
def forward(self, x: torch.Tensor) -> torch.Tensor:
x = x + self.attn(x) if self.add else self.attn(x)
x = x + self.ffn(x) if self.add else self.ffn(x)
return x
class C3k(C3):
def __init__(self, c1: int, c2: int, n: int = 1, shortcut: bool = True, g: int = 1, e: float = 0.5, k: int = 3):
super().__init__(c1, c2, n, shortcut, g, e)
c_ = int(c2 * e) # hidden channels
self.m = nn.Sequential(*(Bottleneck(c_, c_, shortcut, g, k=(k, k), e=1.0) for _ in range(n)))
class C3k2_RCSOSA(C2f):
def __init__(
self,
c1: int,
c2: int,
n: int = 1,
c3k: bool = False,
e: float = 0.5,
attn: bool = False,
g: int = 1,
shortcut: bool = True,
):
super().__init__(c1, c2, n, shortcut, g, e)
self.m = nn.ModuleList(
nn.Sequential(
Bottleneck(self.c, self.c, shortcut, g),
PSABlock_RCSOSA(self.c, attn_ratio=0.5, num_heads=max(self.c // 64, 1)),
)
if attn
else C3k(self.c, self.c, 2, shortcut, g)
if c3k
else Bottleneck(self.c, self.c, shortcut, g)
for _ in range(n)
)
class C2PSA_RCSOSA(nn.Module):
def __init__(self, c1: int, c2: int, n: int = 1, e: float = 0.5):
super().__init__()
assert c1 == c2
self.c = int(c1 * e)
self.cv1 = Conv(c1, 2 * self.c, 1, 1)
self.cv2 = Conv(2 * self.c, c1, 1)
self.m = nn.Sequential(*(PSABlock_RCSOSA(self.c, attn_ratio=0.5, num_heads=self.c // 64) for _ in range(n)))
def forward(self, x: torch.Tensor) -> torch.Tensor:
a, b = self.cv1(x).split((self.c, self.c), dim=1)
b = self.m(b)
return self.cv2(torch.cat((a, b), 1))