文章目录
-
- 每日一句正能量
- 一、引言
- 二、Modbus协议栈架构概览
- [三、Modbus RTU帧结构与数据模型](#三、Modbus RTU帧结构与数据模型)
-
- [3.1 RTU帧结构](#3.1 RTU帧结构)
- [3.2 数据模型](#3.2 数据模型)
- 四、功能码详解与从站状态机
-
- [4.1 常用功能码](#4.1 常用功能码)
- [4.2 从站状态机实现](#4.2 从站状态机实现)
- 五、CRC16校验算法实现
-
- [5.1 逐位计算法](#5.1 逐位计算法)
- [5.2 查表法优化](#5.2 查表法优化)
- [5.3 CRC校验集成](#5.3 CRC校验集成)
- 六、异常响应机制
-
- [6.1 异常响应格式](#6.1 异常响应格式)
- [6.2 标准异常码](#6.2 标准异常码)
- [6.3 异常处理实现](#6.3 异常处理实现)
- [七、Modbus TCP帧结构与MBAP头](#七、Modbus TCP帧结构与MBAP头)
-
- [7.1 MBAP头结构](#7.1 MBAP头结构)
- [7.2 RTU vs TCP关键差异](#7.2 RTU vs TCP关键差异)
- [7.3 Modbus TCP实现](#7.3 Modbus TCP实现)
- 八、主站设计架构与请求-响应流程
-
- [8.1 主站核心模块](#8.1 主站核心模块)
- [8.2 主站调度器实现](#8.2 主站调度器实现)
- 九、RS-485总线拓扑与通信时序
-
- [9.1 RS-485总线设计要点](#9.1 RS-485总线设计要点)
- [9.2 T3.5帧间隔实现](#9.2 T3.5帧间隔实现)
- 十、嵌入式代码实现架构
-
- [10.1 核心数据结构](#10.1 核心数据结构)
- [10.2 功能码路由表](#10.2 功能码路由表)
- 十一、完整代码实现示例
- 十二、调试与测试方法
-
- [12.1 常用调试工具](#12.1 常用调试工具)
- [12.2 常见问题排查](#12.2 常见问题排查)
- 十三、总结与展望
每日一句正能量
两件会阻碍我们自由的事:活在过去和活在他人眼中。
过去无法改变,执着于它会困住现在;活在他人眼中,等于把评判自己的尺子交出去。真正的自由,是能放下过往,也能不在意别人的目光。
一、引言
在工业自动化领域,Modbus协议以其简单、开放、免版税的特点,成为事实上的工业通信标准。从PLC、变频器到传感器、智能仪表,几乎所有工业设备都支持Modbus通信。本文将从零开始,手写实现一个完整的Modbus RTU/TCP协议栈,涵盖主从站设计、功能码解析、CRC校验、异常响应处理等核心技术,为嵌入式开发者提供可直接落地的工程实现方案。
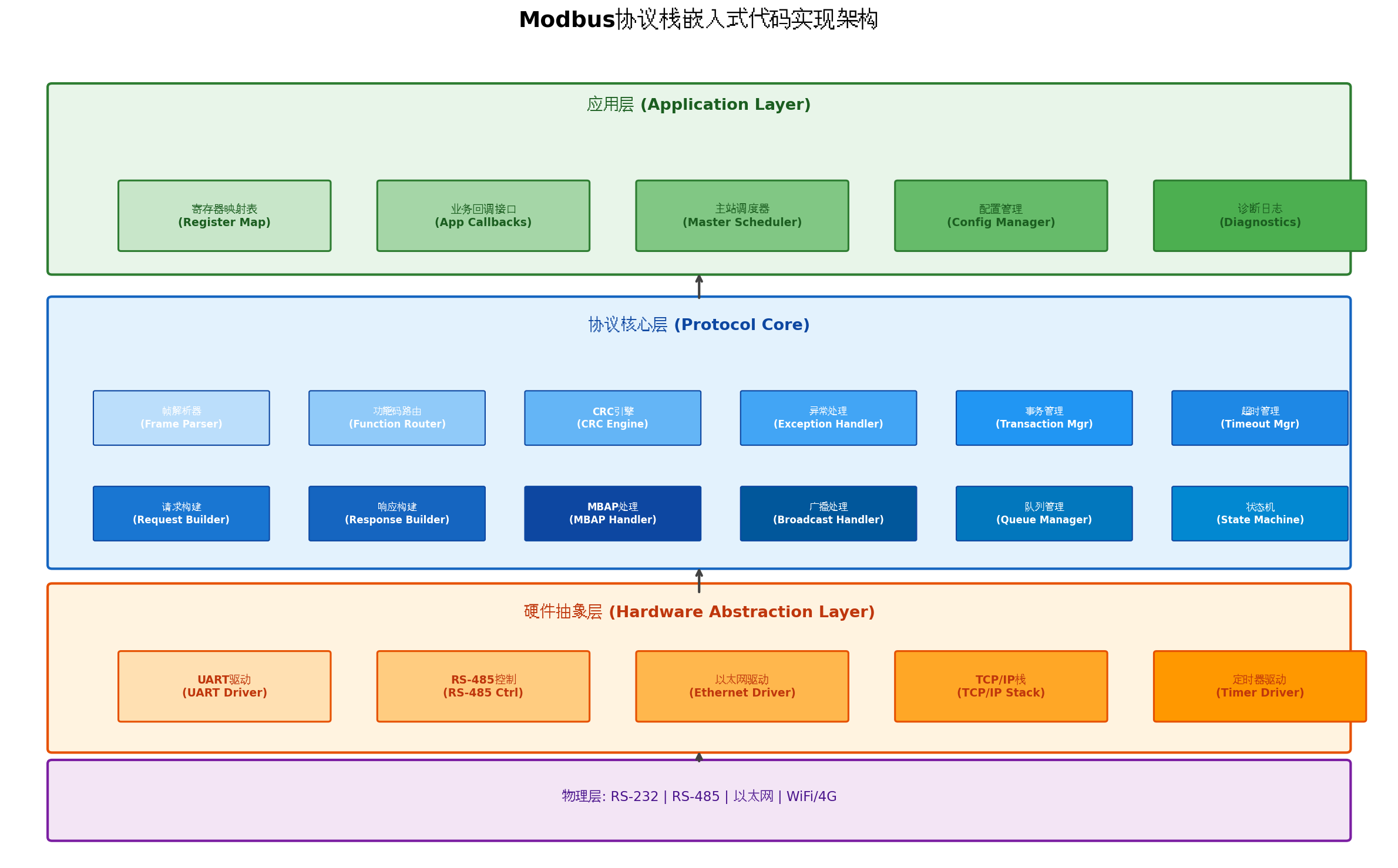
二、Modbus协议栈架构概览
Modbus协议栈采用经典的分层架构设计,在物理层之上构建完整的通信框架:
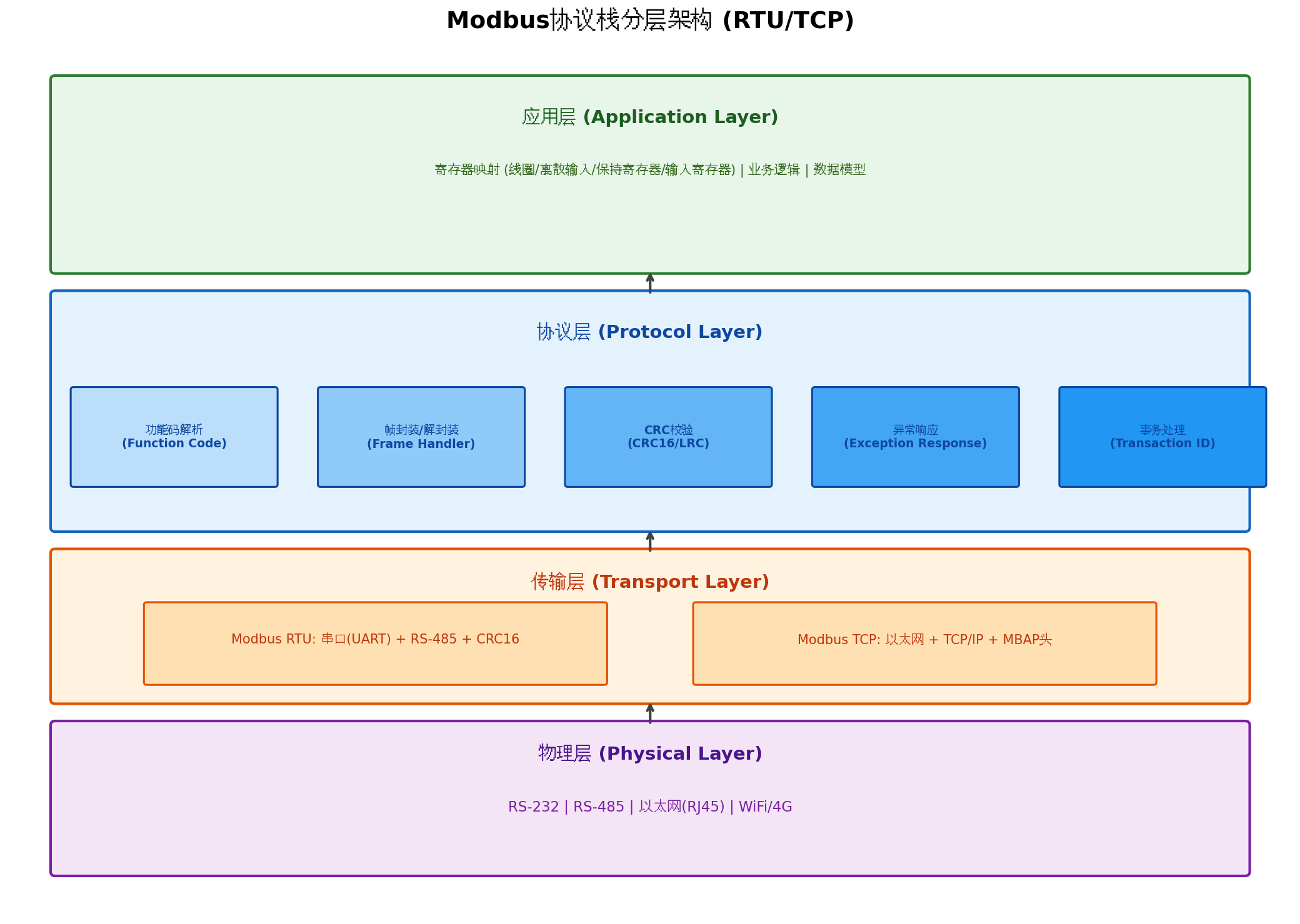
协议栈的核心层次包括:
- 物理层:RS-232/RS-485串口或以太网接口
- 传输层:Modbus RTU使用裸串口传输,Modbus TCP使用TCP/IP(端口502)
- 协议层:功能码路由、帧封装/解封装、CRC校验、异常响应处理
- 应用层:寄存器映射、业务逻辑、数据模型
Modbus协议栈的设计哲学是简单即可靠。相比CANopen等复杂协议,Modbus的帧格式简洁、状态机清晰,非常适合资源受限的嵌入式系统。
三、Modbus RTU帧结构与数据模型
3.1 RTU帧结构
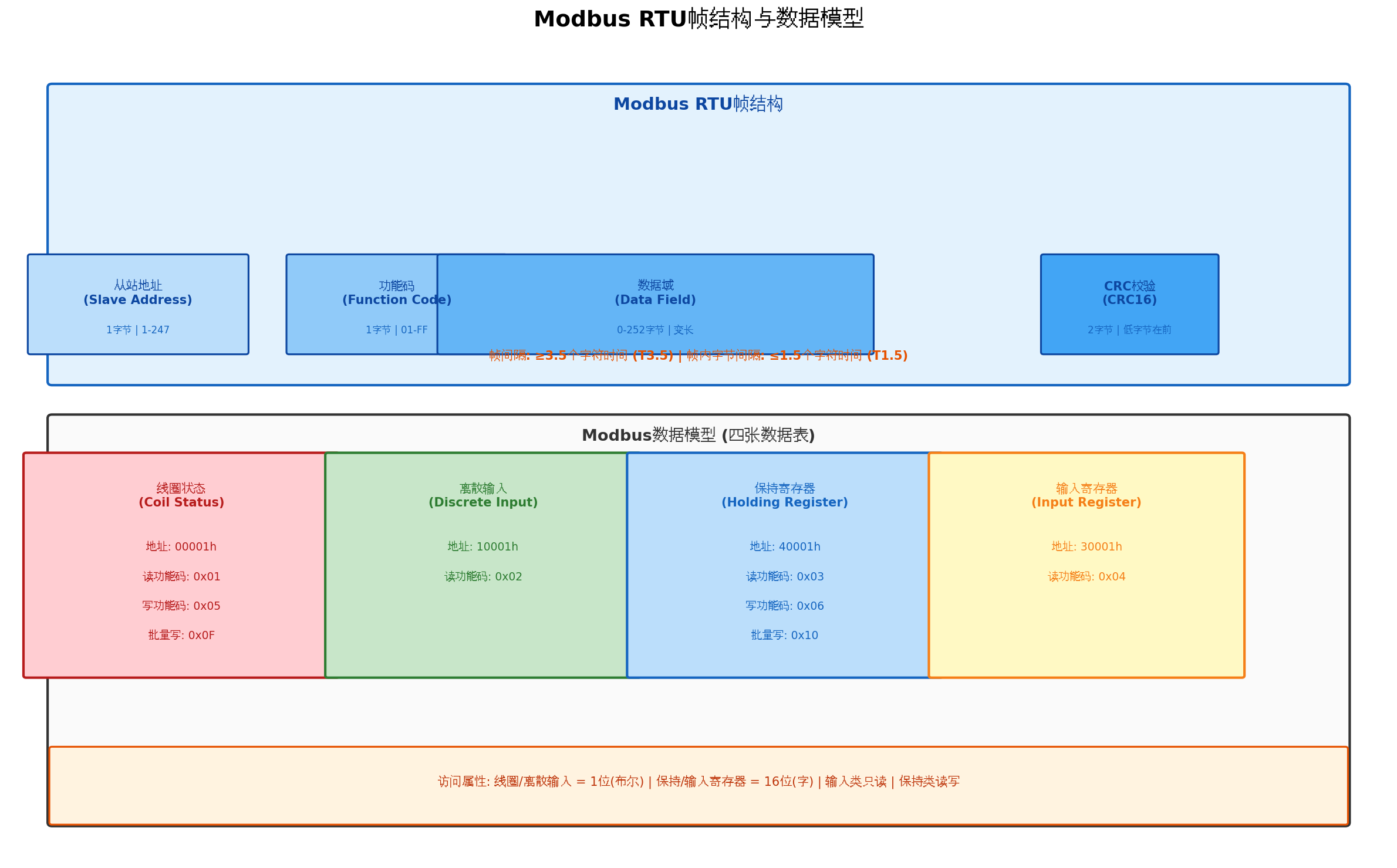
Modbus RTU帧由四个部分组成:
| 字段 | 长度 | 说明 |
|---|---|---|
| 从站地址 | 1字节 | 1-247有效,0为广播地址 |
| 功能码 | 1字节 | 定义操作类型 |
| 数据域 | 0-252字节 | 变长,内容由功能码决定 |
| CRC校验 | 2字节 | 低字节在前,高字节在后 |
帧间隔规则是RTU的关键特性:
- 帧内字节间隔:≤1.5个字符时间(T1.5),超时则认为帧错误
- 帧间间隔:≥3.5个字符时间(T3.5),用于帧边界识别
以9600bps、8N1配置为例:
- 1个字符时间 = 11位 / 9600bps ≈ 1.146ms
- T1.5 ≈ 1.72ms,T3.5 ≈ 4.01ms
3.2 数据模型
Modbus定义了四张数据表,对应不同的功能码:
| 数据表 | 地址范围 | 访问类型 | 数据宽度 | 读功能码 | 写功能码 |
|---|---|---|---|---|---|
| 线圈状态 (Coil) | 00001-09999 | 读写 | 1位 | 0x01 | 0x05/0x0F |
| 离散输入 (Discrete Input) | 10001-19999 | 只读 | 1位 | 0x02 | - |
| 保持寄存器 (Holding Register) | 40001-49999 | 读写 | 16位 | 0x03 | 0x06/0x10 |
| 输入寄存器 (Input Register) | 30001-39999 | 只读 | 16位 | 0x04 | - |
注意:Modbus协议文档中的地址是1-based(40001开始),但实际通信时使用0-based地址(0x0000开始),开发时务必注意这个"差一错误"。
四、功能码详解与从站状态机
4.1 常用功能码
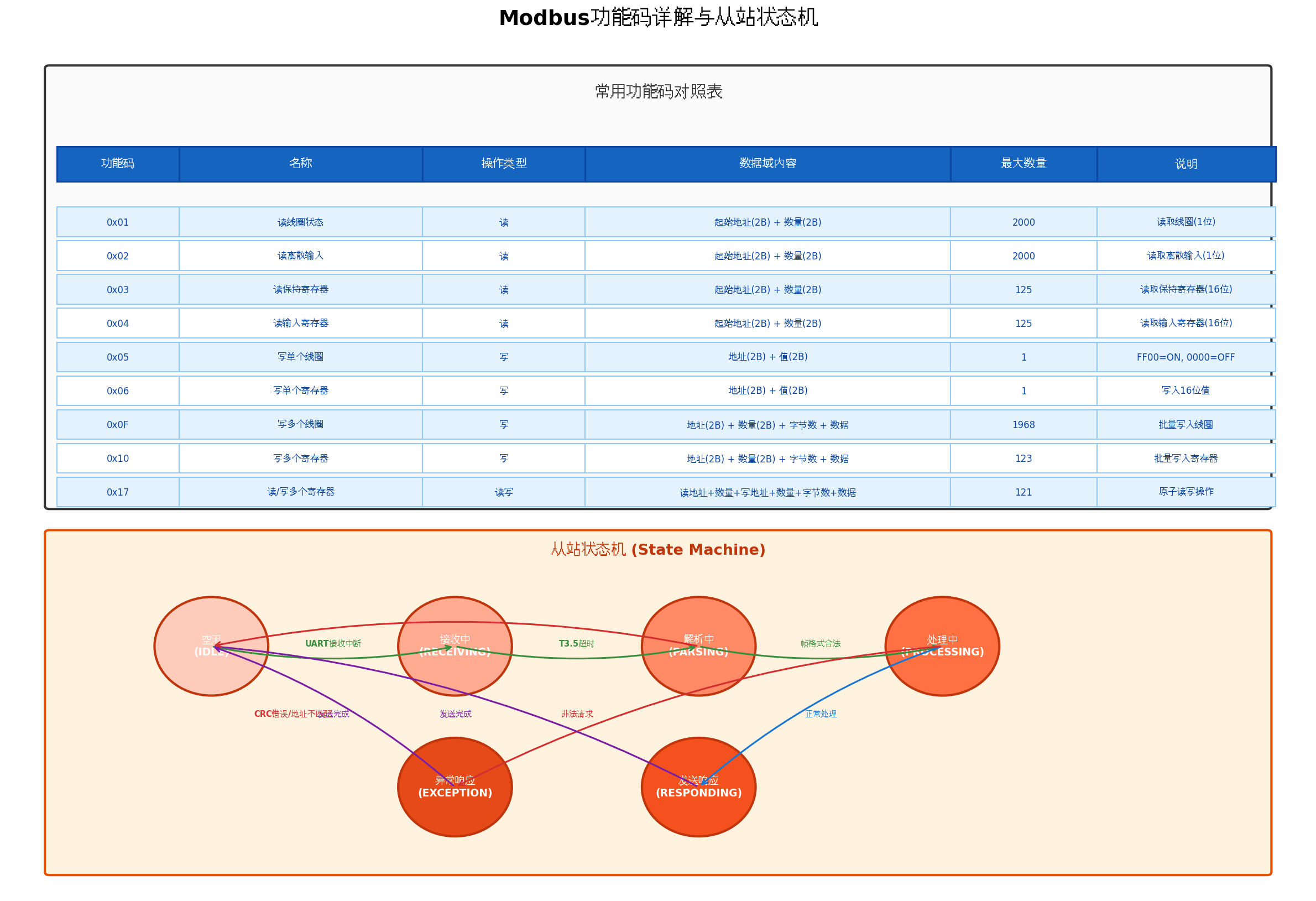
Modbus功能码采用1字节编码,最高位为0表示正常功能码,为1表示异常响应:
| 功能码 | 名称 | 操作 | 数据域内容 | 最大数量 |
|---|---|---|---|---|
| 0x01 | 读线圈 | 读 | 起始地址(2B) + 数量(2B) | 2000 |
| 0x02 | 读离散输入 | 读 | 起始地址(2B) + 数量(2B) | 2000 |
| 0x03 | 读保持寄存器 | 读 | 起始地址(2B) + 数量(2B) | 125 |
| 0x04 | 读输入寄存器 | 读 | 起始地址(2B) + 数量(2B) | 125 |
| 0x05 | 写单个线圈 | 写 | 地址(2B) + 值(2B) | 1 |
| 0x06 | 写单个寄存器 | 写 | 地址(2B) + 值(2B) | 1 |
| 0x0F | 写多个线圈 | 写 | 地址+数量+字节数+数据 | 1968 |
| 0x10 | 写多个寄存器 | 写 | 地址+数量+字节数+数据 | 123 |
| 0x17 | 读/写多个寄存器 | 读写 | 读地址+数量+写地址+数量+字节数+数据 | 121 |
4.2 从站状态机实现
从站采用状态机驱动的方式处理通信:
c
/* 从站状态定义 */
typedef enum {
SLAVE_STATE_IDLE = 0, // 空闲,等待接收
SLAVE_STATE_RECEIVING, // 接收中
SLAVE_STATE_FRAME_READY, // 帧接收完成,待解析
SLAVE_STATE_PROCESSING, // 处理请求
SLAVE_STATE_RESPONDING, // 发送响应
SLAVE_STATE_EXCEPTION // 发送异常响应
} SlaveState_t;
/* 从站主处理函数 */
void Modbus_SlavePoll(void) {
switch (g_slaveState) {
case SLAVE_STATE_IDLE:
/* 启动接收,等待UART中断 */
UART_StartReceive(g_rxBuffer, sizeof(g_rxBuffer));
g_slaveState = SLAVE_STATE_RECEIVING;
break;
case SLAVE_STATE_RECEIVING:
/* 检查T3.5超时,判断帧是否接收完成 */
if (Timer_Elapsed(g_rxStartTime) > T35_TIMEOUT) {
if (g_rxIndex > 0) {
g_slaveState = SLAVE_STATE_FRAME_READY;
}
}
break;
case SLAVE_STATE_FRAME_READY:
/* 验证帧格式 */
if (Modbus_ValidateFrame(g_rxBuffer, g_rxIndex)) {
g_slaveState = SLAVE_STATE_PROCESSING;
} else {
/* 帧错误,丢弃并返回空闲 */
g_rxIndex = 0;
g_slaveState = SLAVE_STATE_IDLE;
}
break;
case SLAVE_STATE_PROCESSING:
/* 路由到对应的功能码处理函数 */
Modbus_ProcessFunctionCode(g_rxBuffer, g_rxIndex);
g_slaveState = SLAVE_STATE_RESPONDING;
break;
case SLAVE_STATE_RESPONDING:
/* 发送正常响应 */
UART_Send(g_txBuffer, g_txLength);
g_slaveState = SLAVE_STATE_IDLE;
break;
case SLAVE_STATE_EXCEPTION:
/* 发送异常响应 */
UART_Send(g_exceptionBuffer, 5); // 地址+功能码+异常码+CRC
g_slaveState = SLAVE_STATE_IDLE;
break;
}
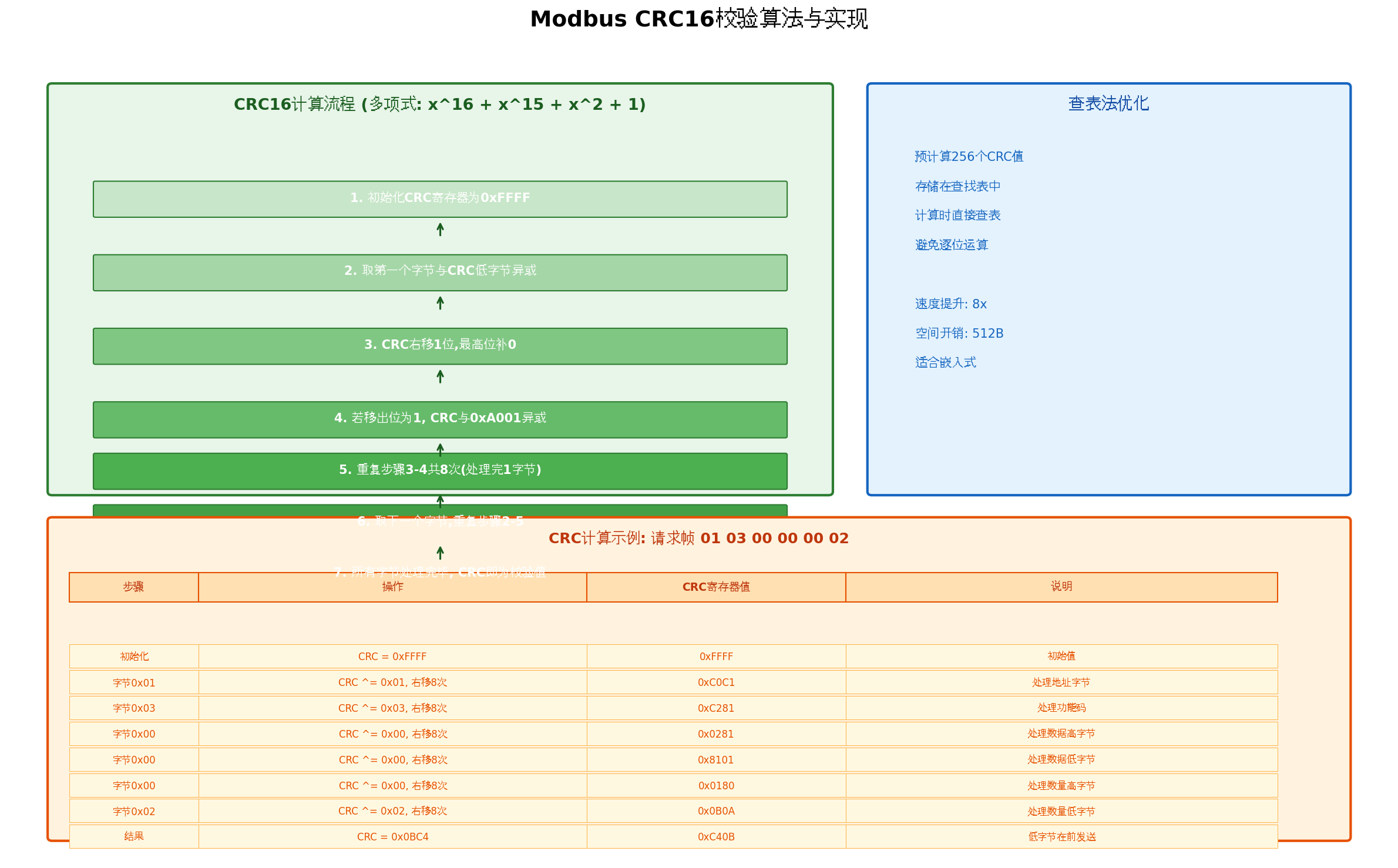
}五、CRC16校验算法实现
CRC16是Modbus RTU数据完整性的核心保障,采用多项式 x^16 + x^15 + x^2 + 1(0xA001)。
5.1 逐位计算法
c
/* CRC16逐位计算 - 适合ROM极小的系统 */
uint16_t Modbus_CRC16_Bitwise(uint8_t *data, uint16_t len) {
uint16_t crc = 0xFFFF;
for (uint16_t i = 0; i < len; i++) {
crc ^= data[i]; // 与当前字节异或
for (int j = 0; j < 8; j++) {
if (crc & 0x0001) {
crc = (crc >> 1) ^ 0xA001;
} else {
crc >>= 1;
}
}
}
return crc;
}5.2 查表法优化
查表法以512字节ROM空间换取8倍速度提升,是嵌入式系统的首选方案:
c
/* CRC16查表法 - 预计算256个CRC值 */
static const uint16_t crcTable[256] = {
0x0000, 0xC0C1, 0xC181, 0x0140, 0xC301, 0x03C0, 0x0280, 0xC241,
0xC601, 0x06C0, 0x0780, 0xC741, 0x0500, 0xC5C1, 0xC481, 0x0440,
/* ... 共256项 ... */
0x4400, 0x84C1, 0x8581, 0x4540, 0x8701, 0x47C0, 0x4680, 0x8641,
0x8201, 0x42C0, 0x4380, 0x8341, 0x4100, 0x81C1, 0x8081, 0x4040
};
uint16_t Modbus_CRC16(uint8_t *data, uint16_t len) {
uint16_t crc = 0xFFFF;
for (uint16_t i = 0; i < len; i++) {
crc = (crc >> 8) ^ crcTable[(crc ^ data[i]) & 0xFF];
}
return crc;
}5.3 CRC校验集成
c
/* 帧验证 */
bool Modbus_ValidateFrame(uint8_t *frame, uint16_t len) {
if (len < 4) return false; // 最小帧: 地址+功能码+CRC(2)
uint16_t rxCrc = (frame[len-1] << 8) | frame[len-2];
uint16_t calcCrc = Modbus_CRC16(frame, len - 2);
return (rxCrc == calcCrc);
}
/* 帧构建时附加CRC */
void Modbus_AppendCRC(uint8_t *frame, uint16_t len) {
uint16_t crc = Modbus_CRC16(frame, len);
frame[len] = crc & 0xFF; // CRC低字节
frame[len + 1] = crc >> 8; // CRC高字节
}六、异常响应机制
异常响应是Modbus协议健壮性的重要体现,当从站无法处理请求时,必须返回明确的错误信息。
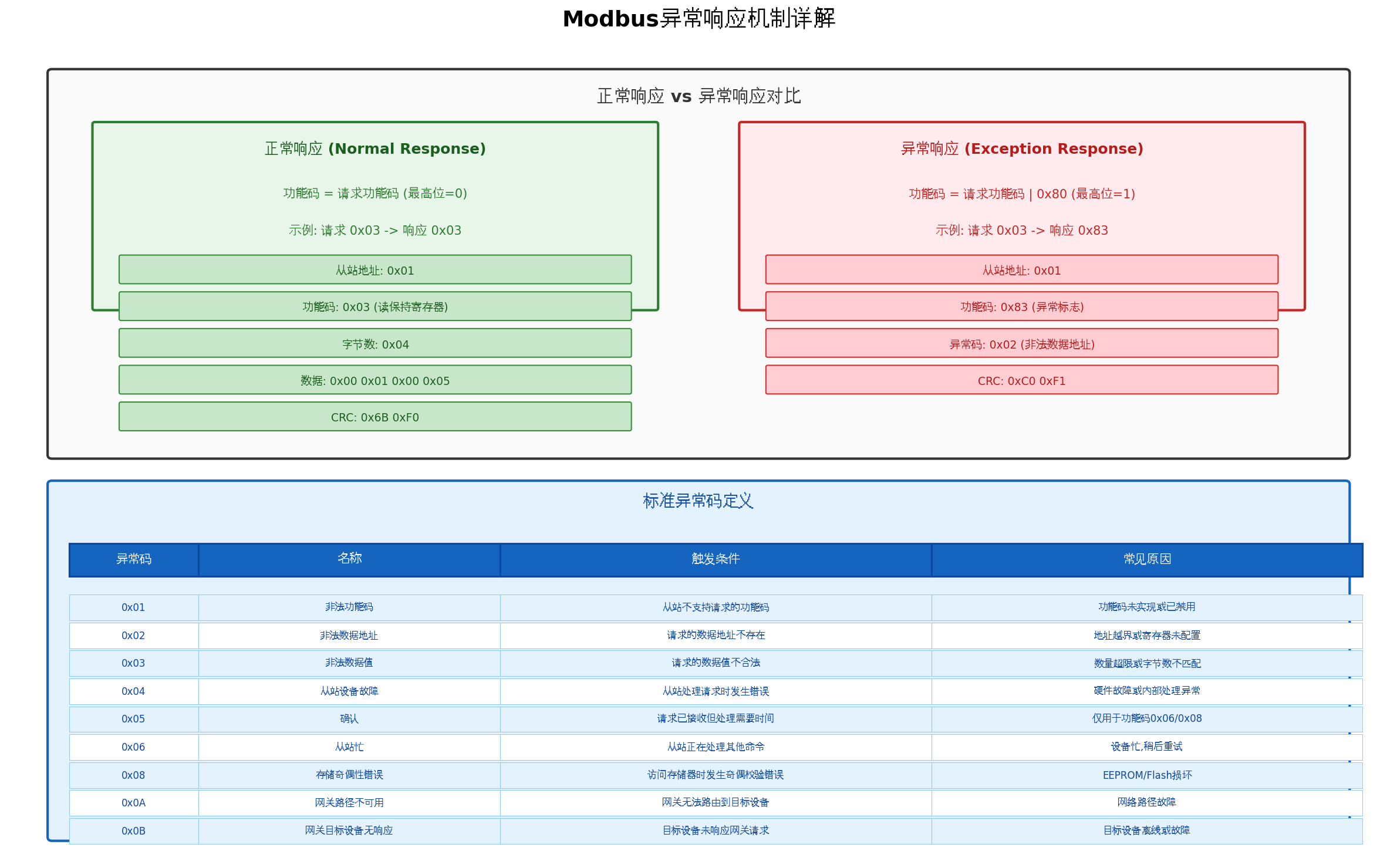
6.1 异常响应格式
异常响应帧结构:
- 从站地址:与请求相同
- 功能码:请求功能码 | 0x80(最高位置1)
- 异常码:1字节,描述错误原因
- CRC:2字节
6.2 标准异常码
| 异常码 | 名称 | 触发条件 | 常见原因 |
|---|---|---|---|
| 0x01 | 非法功能码 | 不支持的功能码 | 功能码未实现或已禁用 |
| 0x02 | 非法数据地址 | 请求地址不存在 | 地址越界或寄存器未配置 |
| 0x03 | 非法数据值 | 请求数据不合法 | 数量超限或字节数不匹配 |
| 0x04 | 从站设备故障 | 处理时发生错误 | 硬件故障或内部异常 |
| 0x05 | 确认 | 请求已接收但需时间处理 | 仅用于0x06/0x08功能码 |
| 0x06 | 从站忙 | 正在处理其他命令 | 设备忙,稍后重试 |
| 0x08 | 存储奇偶性错误 | 存储器访问错误 | EEPROM/Flash损坏 |
| 0x0A | 网关路径不可用 | 网关无法路由 | 网络路径故障 |
| 0x0B | 网关目标无响应 | 目标设备未响应 | 目标设备离线 |
6.3 异常处理实现
c
/* 发送异常响应 */
void Modbus_SendException(uint8_t funcCode, uint8_t exceptionCode) {
uint8_t resp[5];
resp[0] = g_slaveAddr; // 从站地址
resp[1] = funcCode | 0x80; // 功能码最高位置1
resp[2] = exceptionCode; // 异常码
uint16_t crc = Modbus_CRC16(resp, 3);
resp[3] = crc & 0xFF;
resp[4] = crc >> 8;
UART_Send(resp, 5);
}
/* 功能码处理中的异常检查 */
void Modbus_ReadHoldingRegs(uint8_t *req) {
uint16_t startAddr = (req[2] << 8) | req[3];
uint16_t quantity = (req[4] << 8) | req[5];
/* 检查数量范围 */
if (quantity < 1 || quantity > 125) {
Modbus_SendException(0x03, 0x03); // 非法数据值
return;
}
/* 检查地址范围 */
if (startAddr + quantity > HOLDING_REG_MAX) {
Modbus_SendException(0x03, 0x02); // 非法数据地址
return;
}
/* 正常处理... */
}七、Modbus TCP帧结构与MBAP头
Modbus TCP在以太网上运行,使用TCP端口502,其帧结构比RTU更简洁:
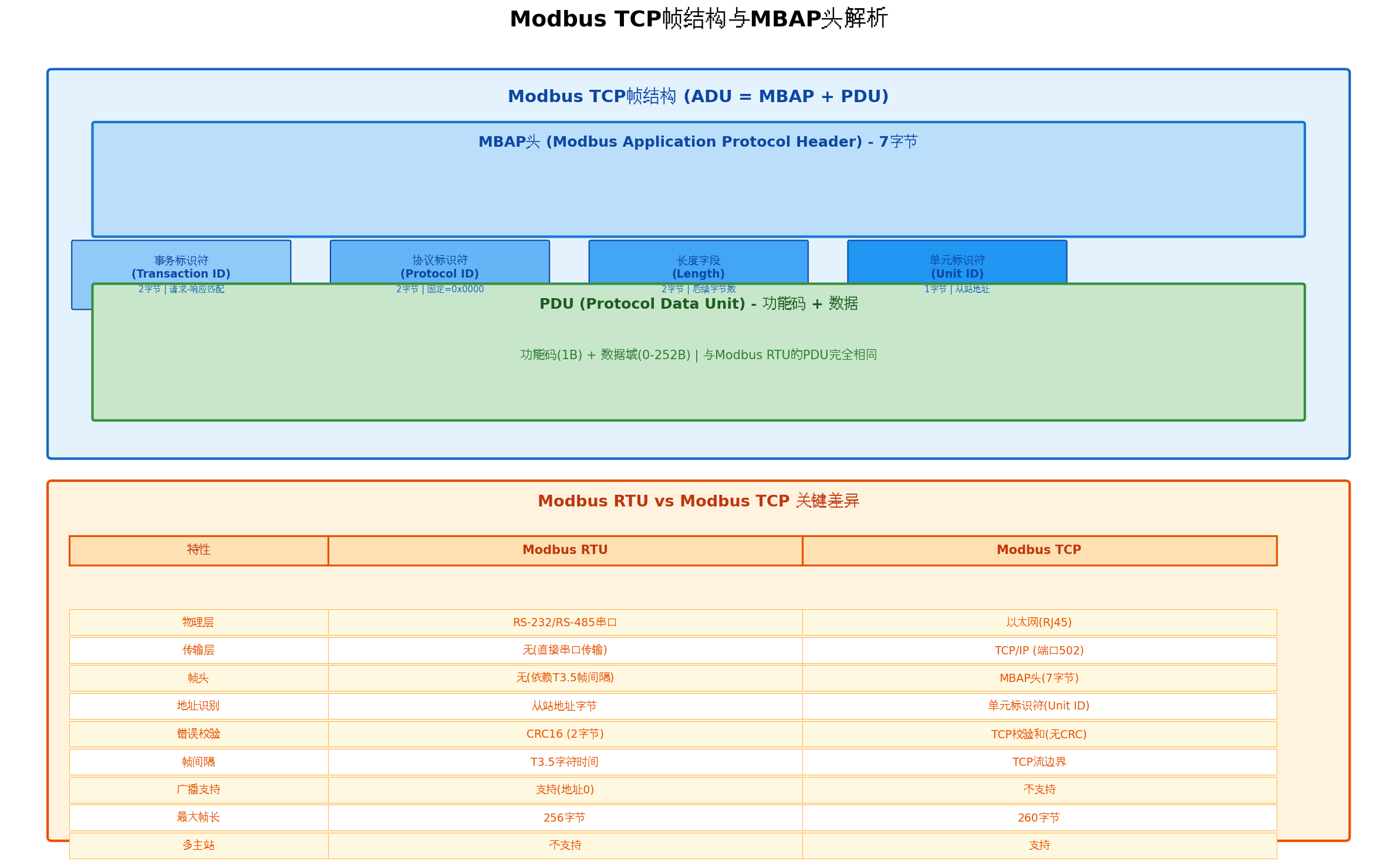
7.1 MBAP头结构
MBAP(Modbus Application Protocol Header)占7字节:
| 字段 | 长度 | 说明 |
|---|---|---|
| 事务标识符 | 2字节 | 请求-响应匹配,主站递增 |
| 协议标识符 | 2字节 | 固定为0x0000 |
| 长度字段 | 2字节 | 后续字节数(单元ID + PDU) |
| 单元标识符 | 1字节 | 从站地址(类似RTU的地址) |
7.2 RTU vs TCP关键差异
| 特性 | Modbus RTU | Modbus TCP |
|---|---|---|
| 物理层 | RS-232/RS-485 | 以太网 |
| 传输层 | 无 | TCP/IP(端口502) |
| 帧头 | 无(依赖T3.5) | MBAP头(7字节) |
| 地址识别 | 从站地址字节 | 单元标识符 |
| 错误校验 | CRC16 | TCP校验和(无CRC) |
| 帧间隔 | T3.5字符时间 | TCP流边界 |
| 广播支持 | 支持(地址0) | 不支持 |
| 多主站 | 不支持 | 支持 |
7.3 Modbus TCP实现
c
/* TCP帧结构 */
typedef struct {
uint16_t transactionId; // 事务标识符
uint16_t protocolId; // 协议标识符 = 0x0000
uint16_t length; // 长度
uint8_t unitId; // 单元标识符
uint8_t pdu[252]; // PDU(功能码+数据)
} ModbusTCP_Frame;
/* TCP帧解析 */
bool ModbusTCP_ParseFrame(uint8_t *rawData, uint16_t len, ModbusTCP_Frame *frame) {
if (len < 7) return false; // MBAP头至少7字节
frame->transactionId = (rawData[0] << 8) | rawData[1];
frame->protocolId = (rawData[2] << 8) | rawData[3];
frame->length = (rawData[4] << 8) | rawData[5];
frame->unitId = rawData[6];
if (frame->protocolId != 0x0000) return false;
if (frame->length != len - 6) return false;
memcpy(frame->pdu, &rawData[7], frame->length - 1);
return true;
}
/* TCP响应构建 */
uint16_t ModbusTCP_BuildResponse(ModbusTCP_Frame *req, uint8_t *respPdu, uint16_t pduLen, uint8_t *outBuf) {
outBuf[0] = req->transactionId >> 8;
outBuf[1] = req->transactionId & 0xFF;
outBuf[2] = 0x00; // protocolId高
outBuf[3] = 0x00; // protocolId低
outBuf[4] = (pduLen + 1) >> 8;
outBuf[5] = (pduLen + 1) & 0xFF;
outBuf[6] = req->unitId;
memcpy(&outBuf[7], respPdu, pduLen);
return 7 + pduLen;
}八、主站设计架构与请求-响应流程
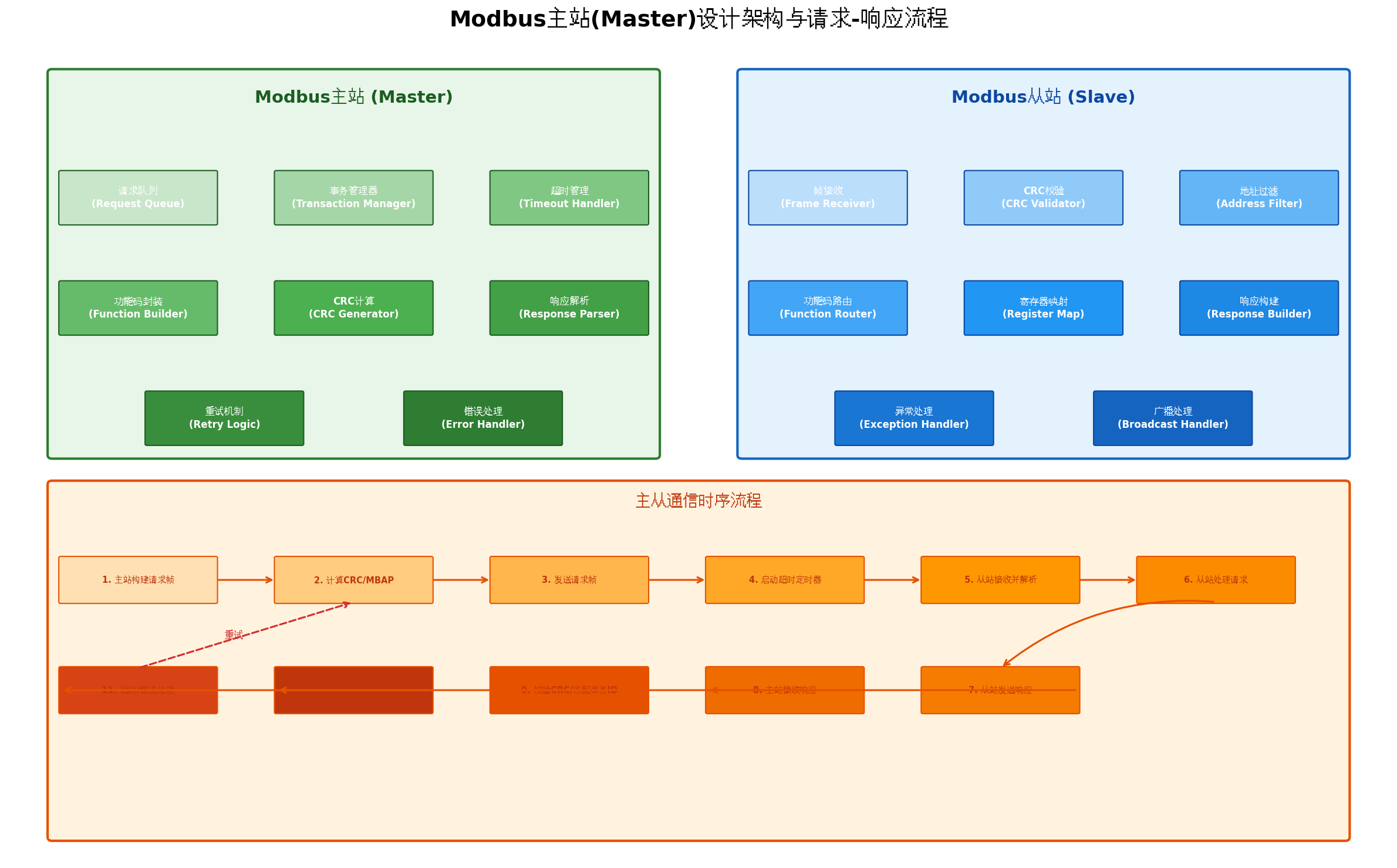
8.1 主站核心模块
主站相比从站更复杂,需要管理请求队列、超时重试、事务匹配等:
c
/* 主站请求结构 */
typedef struct {
uint8_t slaveAddr; // 目标从站地址
uint8_t funcCode; // 功能码
uint8_t reqData[252]; // 请求数据
uint16_t reqLen; // 请求长度
uint8_t respData[252]; // 响应数据缓冲区
uint16_t respLen; // 响应长度
uint16_t transactionId; // 事务ID(TCP)
uint32_t timeout; // 超时时间(ms)
uint8_t retryCount; // 重试次数
uint8_t maxRetry; // 最大重试次数
void (*callback)(uint8_t status, uint8_t *data, uint16_t len); // 完成回调
} ModbusRequest_t;
/* 主站状态机 */
typedef enum {
MASTER_STATE_IDLE = 0,
MASTER_STATE_SENDING,
MASTER_STATE_WAITING,
MASTER_STATE_PROCESSING,
MASTER_STATE_RETRY,
MASTER_STATE_ERROR
} MasterState_t;8.2 主站调度器实现
c
/* 主站轮询函数 */
void Modbus_MasterPoll(void) {
static MasterState_t state = MASTER_STATE_IDLE;
static ModbusRequest_t *currentReq = NULL;
static uint32_t sendTime = 0;
switch (state) {
case MASTER_STATE_IDLE:
/* 从队列取出请求 */
currentReq = ModbusQueue_Dequeue();
if (currentReq != NULL) {
state = MASTER_STATE_SENDING;
}
break;
case MASTER_STATE_SENDING:
/* 构建并发送请求帧 */
if (g_protocolType == PROTOCOL_RTU) {
ModbusRTU_SendRequest(currentReq);
} else {
ModbusTCP_SendRequest(currentReq);
}
sendTime = GetTickCount();
state = MASTER_STATE_WAITING;
break;
case MASTER_STATE_WAITING:
/* 检查响应或超时 */
if (Modbus_IsResponseReady()) {
state = MASTER_STATE_PROCESSING;
} else if (GetTickCount() - sendTime > currentReq->timeout) {
/* 超时处理 */
currentReq->retryCount++;
if (currentReq->retryCount <= currentReq->maxRetry) {
state = MASTER_STATE_RETRY;
} else {
state = MASTER_STATE_ERROR;
}
}
break;
case MASTER_STATE_PROCESSING:
/* 解析响应 */
if (Modbus_ParseResponse(currentReq)) {
/* 成功,调用回调 */
if (currentReq->callback != NULL) {
currentReq->callback(0, currentReq->respData, currentReq->respLen);
}
} else {
/* 异常响应 */
if (currentReq->callback != NULL) {
currentReq->callback(currentReq->respData[2], NULL, 0);
}
}
state = MASTER_STATE_IDLE;
break;
case MASTER_STATE_RETRY:
/* 重试 */
state = MASTER_STATE_SENDING;
break;
case MASTER_STATE_ERROR:
/* 最终失败 */
if (currentReq->callback != NULL) {
currentReq->callback(0xFF, NULL, 0); // 超时错误
}
state = MASTER_STATE_IDLE;
break;
}
}九、RS-485总线拓扑与通信时序
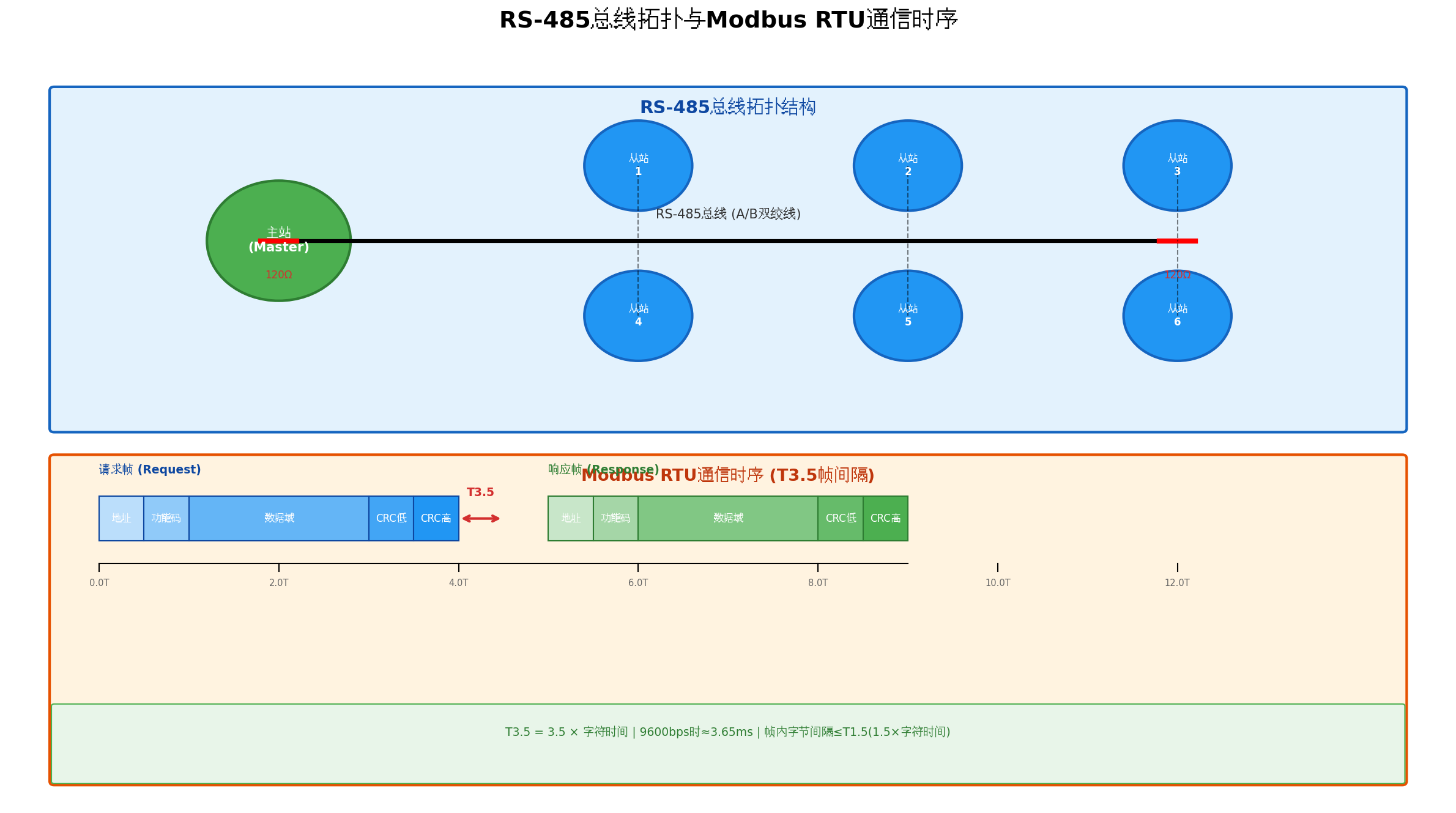
9.1 RS-485总线设计要点
- 终端电阻:总线两端各接120Ω电阻,消除信号反射
- 偏置电阻:空闲时提供偏置电压,避免误触发
- 最大节点数:32个(标准收发器),使用高阻抗收发器可达256个
- 最大距离:1200m(9600bps),速率越高距离越短
- 半双工控制:主站需要控制DE/RE引脚切换收发状态
c
/* RS-485发送控制 */
void RS485_SendData(uint8_t *data, uint16_t len) {
/* 切换为发送模式 */
RS485_DE_HIGH(); // 使能发送
RS485_RE_HIGH(); // 禁用接收
UART_Send(data, len);
/* 等待发送完成 */
while (!UART_IsTxComplete());
/* 切换回接收模式 */
RS485_DE_LOW();
RS485_RE_LOW();
/* 延时确保总线释放 */
DelayUs(20); // 根据波特率调整
}9.2 T3.5帧间隔实现
c
/* 使用定时器实现T3.5检测 */
#define BAUDRATE 9600
#define T35_US ((3500000UL + BAUDRATE - 1) / BAUDRATE) // 3.5字符时间(微秒)
volatile uint32_t g_lastRxTime = 0;
volatile uint16_t g_rxIndex = 0;
volatile uint8_t g_rxBuffer[256];
/* UART接收中断 */
void UART_IRQHandler(void) {
uint8_t data = UART_ReadByte();
uint32_t currentTime = GetMicros();
/* 检查帧间隔 */
if (g_rxIndex > 0 && (currentTime - g_lastRxTime) > T35_US) {
/* T3.5超时,帧接收完成 */
g_frameReady = true;
g_rxIndex = 0;
}
g_rxBuffer[g_rxIndex++] = data;
g_lastRxTime = currentTime;
}
/* 定时器轮询检查T3.5 */
void Modbus_PollFrameTimeout(void) {
if (g_rxIndex > 0 && !g_frameReady) {
if ((GetMicros() - g_lastRxTime) > T35_US) {
g_frameReady = true;
}
}
}十、嵌入式代码实现架构
10.1 核心数据结构
c
/* 寄存器映射表 */
#define COIL_MAX 2000
#define DISCRETE_INPUT_MAX 2000
#define HOLDING_REG_MAX 125
#define INPUT_REG_MAX 125
typedef struct {
uint8_t coils[COIL_MAX / 8 + 1]; // 线圈位图
uint8_t discreteInputs[DISCRETE_INPUT_MAX / 8 + 1]; // 离散输入位图
uint16_t holdingRegs[HOLDING_REG_MAX]; // 保持寄存器
uint16_t inputRegs[INPUT_REG_MAX]; // 输入寄存器
/* 访问回调 */
void (*onCoilWrite)(uint16_t addr, bool value);
void (*onHoldingRegWrite)(uint16_t addr, uint16_t value);
} ModbusRegMap_t;
/* 协议栈配置 */
typedef struct {
uint8_t slaveAddr; // 从站地址
uint32_t baudrate; // 波特率
ProtocolType_t protocol; // RTU/TCP
ModbusRegMap_t *regMap; // 寄存器映射
uint16_t responseTimeout; // 响应超时(ms)
uint8_t maxRetry; // 最大重试次数
} ModbusConfig_t;10.2 功能码路由表
c
/* 功能码处理函数指针 */
typedef void (*FuncHandler_t)(uint8_t *req, uint16_t reqLen);
typedef struct {
uint8_t funcCode;
FuncHandler_t handler;
const char *description;
} FuncCodeRoute_t;
/* 功能码路由表 */
static const FuncCodeRoute_t g_funcRoutes[] = {
{0x01, Modbus_ReadCoils, "Read Coils"},
{0x02, Modbus_ReadDiscreteInputs, "Read Discrete Inputs"},
{0x03, Modbus_ReadHoldingRegs, "Read Holding Registers"},
{0x04, Modbus_ReadInputRegs, "Read Input Registers"},
{0x05, Modbus_WriteSingleCoil, "Write Single Coil"},
{0x06, Modbus_WriteSingleReg, "Write Single Register"},
{0x0F, Modbus_WriteMultipleCoils, "Write Multiple Coils"},
{0x10, Modbus_WriteMultipleRegs, "Write Multiple Registers"},
{0x17, Modbus_ReadWriteMultipleRegs, "Read/Write Multiple Registers"},
{0x00, NULL, NULL} // 结束标记
};
/* 功能码路由 */
void Modbus_RouteFunctionCode(uint8_t *req, uint16_t reqLen) {
uint8_t funcCode = req[1];
for (int i = 0; g_funcRoutes[i].handler != NULL; i++) {
if (g_funcRoutes[i].funcCode == funcCode) {
g_funcRoutes[i].handler(req, reqLen);
return;
}
}
/* 未找到对应功能码 */
Modbus_SendException(funcCode, 0x01); // 非法功能码
}十一、完整代码实现示例

以下是完整的从站帧处理核心代码:
c
/* Modbus协议栈核心实现 */
#include "modbus.h"
/* CRC16查表法 */
static const uint16_t crcTable[256] = {
0x0000, 0xC0C1, 0xC181, 0x0140, 0xC301, 0x03C0, 0x0280, 0xC241,
/* ... 完整256项 ... */
0x8201, 0x42C0, 0x4380, 0x8341, 0x4100, 0x81C1, 0x8081, 0x4040
};
uint16_t Modbus_CRC16(uint8_t *data, uint16_t len) {
uint16_t crc = 0xFFFF;
for (uint16_t i = 0; i < len; i++) {
crc = (crc >> 8) ^ crcTable[(crc ^ data[i]) & 0xFF];
}
return crc;
}
/* 从站帧处理状态机 */
void Modbus_SlaveProcessFrame(uint8_t *rxBuf, uint16_t len) {
/* 1. 验证CRC */
uint16_t rxCrc = (rxBuf[len-1] << 8) | rxBuf[len-2];
if (Modbus_CRC16(rxBuf, len - 2) != rxCrc) {
return; // CRC错误,静默丢弃
}
/* 2. 地址过滤 */
uint8_t slaveAddr = rxBuf[0];
if (slaveAddr != g_slaveAddr && slaveAddr != 0) {
return; // 不是发给本站的
}
/* 3. 功能码路由 */
uint8_t funcCode = rxBuf[1];
switch (funcCode) {
case 0x01: Modbus_ReadCoils(rxBuf); break;
case 0x03: Modbus_ReadHoldingRegs(rxBuf); break;
case 0x06: Modbus_WriteSingleReg(rxBuf); break;
case 0x10: Modbus_WriteMultipleRegs(rxBuf); break;
default: Modbus_SendException(funcCode, 0x01); break;
}
}
/* 读保持寄存器 (0x03) */
void Modbus_ReadHoldingRegs(uint8_t *req) {
uint16_t startAddr = (req[2] << 8) | req[3];
uint16_t quantity = (req[4] << 8) | req[5];
/* 参数校验 */
if (quantity < 1 || quantity > 125) {
Modbus_SendException(0x03, 0x03); return; // 非法数据值
}
if (startAddr + quantity > HOLDING_REG_MAX) {
Modbus_SendException(0x03, 0x02); return; // 非法数据地址
}
/* 构建响应 */
uint8_t resp[256];
resp[0] = g_slaveAddr;
resp[1] = 0x03;
resp[2] = quantity * 2; // 字节数
for (int i = 0; i < quantity; i++) {
resp[3 + i*2] = g_holdingRegs[startAddr + i] >> 8; // 高字节
resp[4 + i*2] = g_holdingRegs[startAddr + i] & 0xFF; // 低字节
}
uint16_t crc = Modbus_CRC16(resp, 3 + quantity * 2);
resp[3 + quantity*2] = crc & 0xFF;
resp[4 + quantity*2] = crc >> 8;
UART_Send(resp, 5 + quantity * 2);
}十二、调试与测试方法
12.1 常用调试工具
| 工具 | 用途 | 特点 |
|---|---|---|
| Modbus Poll | 主站模拟 | 功能强大,支持脚本 |
| Modbus Slave | 从站模拟 | 易于配置,适合测试主站 |
| QModMaster | 开源主站 | 免费,跨平台 |
| 串口助手 | 查看原始数据 | 十六进制显示,便于分析 |
| 示波器 | 信号质量分析 | 检查RS-485波形 |
12.2 常见问题排查
| 现象 | 可能原因 | 解决方法 |
|---|---|---|
| 无响应 | 地址错误/波特率不匹配 | 检查地址和串口参数 |
| CRC错误 | 线路干扰/终端电阻缺失 | 检查接线,添加终端电阻 |
| 异常码0x02 | 寄存器地址越界 | 核对地址映射表 |
| 超时 | 从站处理慢/线路延迟 | 增加超时时间,检查从站负载 |
| 数据错乱 | 字节序问题 | 确认大端/小端转换 |
十三、总结与展望
本文从协议栈架构、帧结构、功能码、CRC校验、异常响应、主从站设计等多个维度,完整阐述了Modbus RTU/TCP协议栈的手写实现方案。关键技术要点包括:
- 帧间隔机制是RTU的核心,T3.5超时检测决定了帧边界识别
- CRC16查表法以512字节ROM换取8倍性能提升,适合嵌入式
- 功能码路由表实现可扩展的代码架构,便于新增功能
- 异常响应机制保障协议健壮性,每个错误都有明确反馈
- Modbus TCP在RTU基础上增加MBAP头,实现以太网扩展
在实际工业应用中,还需要考虑:
- 多核RTOS环境下的并发访问与线程安全
- RS-485总线的电气隔离与浪涌保护
- Modbus over TCP/UDP的网关设计
- 安全增强(TLS加密、访问控制)
通过本文的技术实现,开发者可以构建完整的Modbus主从站设备,并具备向多协议网关(Modbus转MQTT/OPC UA)扩展的基础能力。
转载自:https://blog.csdn.net/u014727709/article/details/162512176
欢迎 👍点赞✍评论⭐收藏,欢迎指正