1、特性
1.1、架构与数据处理
- 三通道架构,分别用于 UI、EIS、OIS 数据处理
- 可编程有限状态机,支持加速度计、陀螺仪、外部传感器高速数据处理,最高 960Hz 采样率
- 内置低功耗传感器融合算法
- 集成机器学习运算内核,可导出特征与滤波数据,适配 AI 应用
- 嵌入式自适应自配置(ASC)功能
1.2、低功耗与常驻运行
- 加速度计、陀螺仪支持 "永久在线" 工作模式,功耗极低
- 高性能组合模式下功耗仅 0.65mA
- 供电规格
- 模拟电源电压:1.71V ~ 3.6V
- 独立 IO 电源(宽压区间):1.08V ~ 3.6V
1.3、传感器量程规格
加速度计
满量程可选:±2g / ±4g / ±8g / ±16g
这里的 g = 重力加速度 ,1g ≈ 9.8 m/s²,代表地球标准重力。 这是加速度计的满量程测量范围,芯片可软件配置切换这四档量程。
- ±2 g 测量范围:-19.6 ~ +19.6 m/s² 适合:计步、姿态判断、手机平放 / 倾斜检测、日常 UI 翻转,精度最高。
- ±4 g 测量范围:-39.2 ~ +39.2 m/s² 适合:轻度运动、走路慢跑、小幅晃动检测。
- ±8 g 测量范围:-78.4 ~ +78.4 m/s² 适合:跑步、跳跃、颠簸场景、防抖基础采集。
- ±16 g 测量范围:-156.8 ~ +156.8 m/s² 适合:剧烈震动、跌落检测、高速运动、工业冲击采集。
芯片 ADC 总采样位数固定,量程越小,单 bit 分辨率越高,测量越精细:
- ±2g:灵敏度最高,微小晃动都能识别(双击、抬手亮屏)
- ±16g:量程最大,但微小加速度变化分辨能力最弱
陀螺仪
满量程可选:±125 / ±250 / ±500 / ±1000 / ±2000 / ±4000 dps
dps = degrees per second ,度每秒,是陀螺仪的量程单位,代表设备每秒旋转的角度。 这组参数是陀螺仪可配置的满量程测量范围,用来检测物体旋转、转动动作。
- ±125 dps 量程最小、分辨率最高,适合缓慢小幅转动:手机屏幕翻转、日常姿态微调、UI 交互。
- ±250 dps 轻度转动,适合普通手持设备日常姿态检测、慢速云台防抖。
- ±500 dps 手机常规拍摄 EIS 电子防抖、日常短视频拍摄。
- ±1000 dps 边走边拍、走路录像、小幅运动防抖。
- ±2000 dps 快速转动、跑步拍摄、运动镜头、手持云台大幅度摇摆。
- ±4000 dps 最大量程,适合极速旋转、剧烈运动、快速甩动、航拍、高速运动拍摄,能捕捉超大角度转动。
- 量程越小(如 ±125dps):每 1bit 代表的角度变化极小,微小转动都能精准捕捉,防抖、姿态检测精度更高;
- 量程越大(如 ±4000dps):能测高速旋转,但对细微转动的分辨能力会下降。
- g(重力加速度):测直线加速度、重力、震动、跌落、步数;
- dps(度 / 秒):测旋转、转动、摇晃,专门给 OIS 光学防抖、EIS 电子防抖提供数据。
1.4、存储与接口
- 智能 FIFO 缓冲区,最大 4.5KB
- 主通信接口:SPI / I²C / MIPI I3C® v1.1,支持与主控数据同步
- 辅助 SPI 接口:输出陀螺仪、加速度计 OIS 防抖数据
- OIS 防抖功能可通过辅助 SPI、主接口(SPI/I²C/MIPI I3C v1.1)配置
- 主接口独立 EIS 电子防抖通道,配套专用滤波
- 内置模拟集线器,用于 ADC 采集与模拟输入数据处理
1.5、运动 & 姿态检测功能
- 高级计步套件:步数检测、步数统计
- 有效运动检测、倾斜检测
- 标准中断触发源:自由落体、唤醒、6 轴 / 4 轴姿态、单击、双击
1.6、人机交互 UI 模块(内置 Qvar 静电传感器)
支持触控交互:单击、双击、三击、长按、左右滑动(L/R--R/L swipe)
1.7、内置外设
- 片内温度传感器
- Qvar 静电传感器(UI 交互专用)
1.8、系统兼容性
- 符合 Android 系统标准
1.9、封装与环保标准
- 小型化尺寸:2.5 mm × 3 mm × 0.83 mm
- ECOPACK 环保封装,符合 RoHS 标准
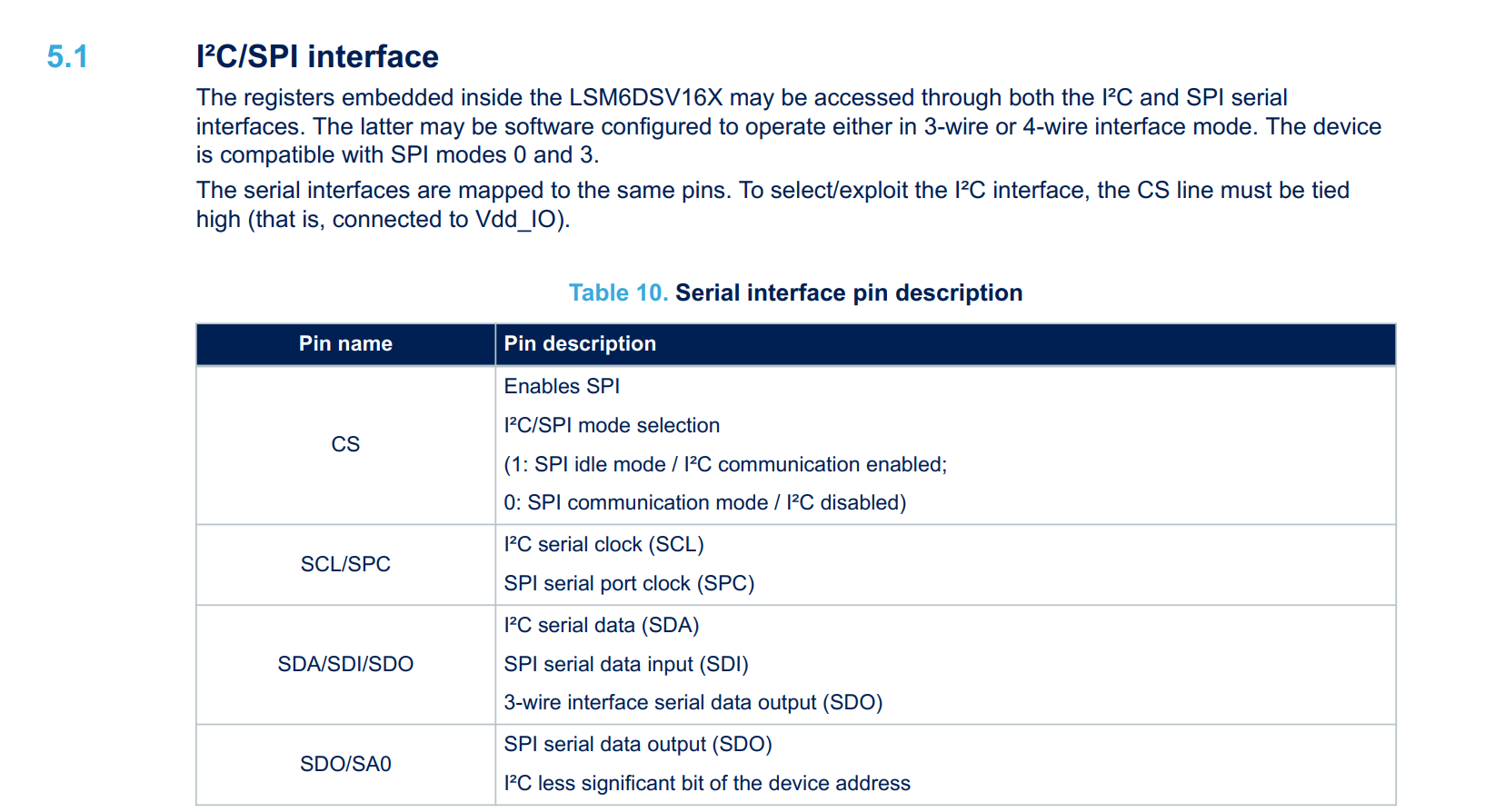
2、IIC接口
2.1、接线
这款芯片兼容iic和spi,笔者这里使用的是iic接口
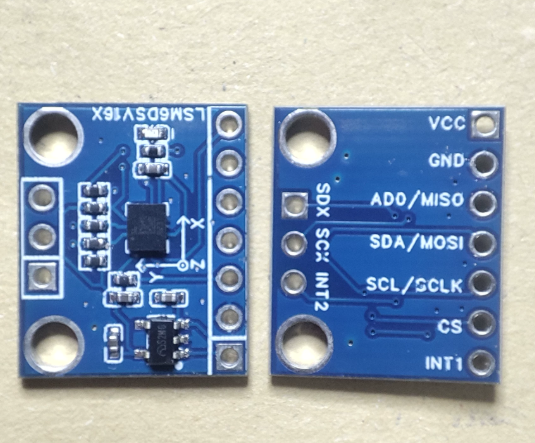
图片来源:春节不发货LSM6DSV16XTR模块六轴传感器,内置算法融合,AI应用-淘宝网
接线如下:
VCC接3.3V
GND接地
CS接3.3V拉高是iic模式,拉低是spi模式
ADO/MISO(SDO/SA0)决定iic从机地址,SDO/SA0接GND,地址:0X6A;SDO/SA0接VCC,地址:0X6B
必须固定电平,不能悬空
SCL/SCLK(SCL/SPC)、SDA/MOSI(SDA/SDI/SDO)正常接iic主机对应的接口
这里实物的接口名称和数据手册的接口名称不一样,括号里面的是数据手册的名称
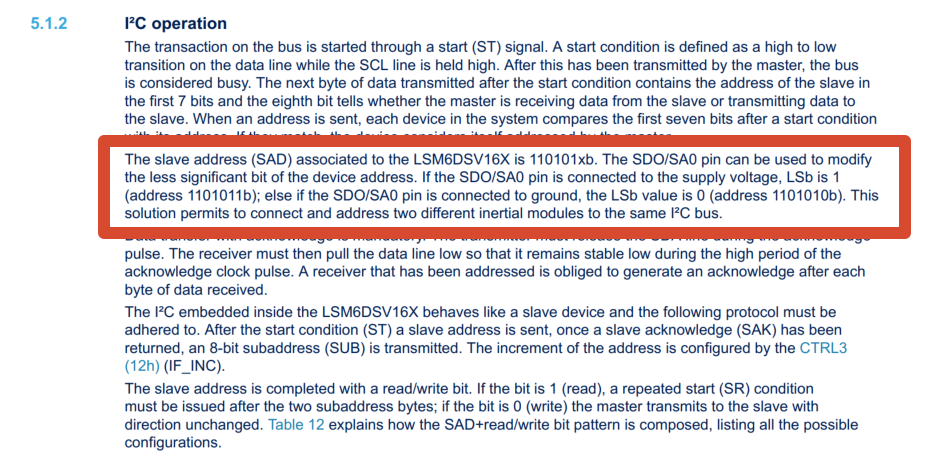
数据手册这里描述了:SDO/SA0接GND,地址:0X6A;SDO/SA0接VCC,地址:0X6B
LSM6DSV16X 作为 I2C 从机,通信流程固定:
- 主机发起始信号 ST;
- 发送 7 位从地址 + 读写位,等待芯片应答 SAK;
- 应答成功后,主机发送8 位寄存器子地址 SUB(要读 / 写的芯片内部寄存器地址,比如 CTRL1、MLC 相关寄存器);
- 寄存器地址自动递增功能,由寄存器
CTRL3 (0x12)的 IF_INC 位控制。
- 写操作(R/W 位 = 0) 发送从地址 + 写位 → ACK → 寄存器子地址 → 连续发多字节数据,总线方向不变,直接写入对应寄存器。
- 读操作(R/W 位 = 1) 流程:起始 ST → 从地址 (写) → ACK → 寄存器子地址 → 重复起始信号 SR → 再发从地址 (读) → 读取芯片返回的数据。
通俗讲:I2C 读传感器必须先发一次 "写地址" 指定寄存器,再发重复起始切换读模式,不能直接发读地址。

| 列名 | 含义 |
|---|---|
| Command | 操作类型:Read(读)/ Write(写) |
| SAD6:1 | 芯片固定高 6 位从机地址,固定二进制 110101,不可修改 |
| SAD0 = SA0 | 最低位,由硬件引脚 SDO/SA0 电平决定:SA0 接 GND → 0;SA0 接 3.3V (VDD) → 1 |
| R/W | I2C 读写控制位:0 = 写操作,1 = 读操作 |
| SAD+R/W | 完整 8 位 I2C 总线传输字节(二进制 + 十六进制) |
场景 1:SA0 接 GND(SAD 0=0)
- Write 写操作 SAD 6:1=110101 + SAD 0=0 + R/W=0 二进制:
11010100=0xD4对应你说的从机地址 0x6A(7 位地址是 0110101,即 0x6A,写字节 = 0x6A<<1=0xD4) - Read 读操作 SAD 6:1=110101 + SAD 0=0 + R/W=1 二进制:
11010101=0xD5读字节 =0x6A << 1 | 1 = 0xD5
场景 2:SA0 接 3.3V(SAD 0=1)
- Write 写操作 SAD 6:1=110101 + SAD 0=1 + R/W=0 二进制:
11010110=0xD6对应你说的从机地址 0x6B(7 位地址 01101011=0x6B,写字节 = 0x6B<<1=0xD6) - Read 读操作 SAD 6:1=110101 + SAD 0=1 + R/W=1 二进制:
11010111=0xD7读字节 =0x6B << 1 | 1 = 0xD7
- SA0/GND → 7 位地址
0x6A,写指令0xD4,读指令0xD5 - SA0/VCC → 7 位地址
0x6B,写指令0xD6,读指令0xD7
- 7 位从机地址:软件驱动里配置的设备 ID(0x6A / 0x6B)
- 8 位总线发送字节:硬件 I2C 实际发出去的字节(0xD4/D5/D6/D7),是 7 位地址左移 1 位,最低位填充 R/W 读写标记