文章目录
-
- 每日一句正能量
- 摘要
- 一、LoRaWAN网络架构与协议栈概览
-
- [1.1 星型网络拓扑](#1.1 星型网络拓扑)
- [1.2 协议栈分层模型](#1.2 协议栈分层模型)
- [二、Class A/B/C终端:功耗与实时性的三重奏](#二、Class A/B/C终端:功耗与实时性的三重奏)
-
- [2.1 三类终端的核心差异](#2.1 三类终端的核心差异)
- [2.2 Class A:超低功耗的王者](#2.2 Class A:超低功耗的王者)
- [2.3 Class B:定时唤醒的平衡艺术](#2.3 Class B:定时唤醒的平衡艺术)
- [2.4 Class C:实时性的极致追求](#2.4 Class C:实时性的极致追求)
- 三、扩频因子(SF):距离、速率与功耗的三角博弈
-
- [3.1 扩频因子的物理本质](#3.1 扩频因子的物理本质)
- [3.2 空中时间(Time on Air)计算](#3.2 空中时间(Time on Air)计算)
- [3.3 SF选择的工程实践](#3.3 SF选择的工程实践)
- 四、ADR自适应速率:智能网络的自优化引擎
-
- [4.1 ADR的设计目标](#4.1 ADR的设计目标)
- [4.2 ADR算法详解](#4.2 ADR算法详解)
- [4.3 终端端ADR实现](#4.3 终端端ADR实现)
- [4.4 ADR的边界条件](#4.4 ADR的边界条件)
- 五、功耗建模与电池寿命估算
-
- [5.1 Class A终端能耗模型](#5.1 Class A终端能耗模型)
- [5.2 功耗优化策略](#5.2 功耗优化策略)
- 六、LoRaWAN终端软件架构实现
-
- [6.1 协议栈分层架构](#6.1 协议栈分层架构)
- [6.2 状态机设计](#6.2 状态机设计)
- 七、终端选型决策矩阵
-
- [7.1 决策流程](#7.1 决策流程)
- [7.2 典型应用场景对照](#7.2 典型应用场景对照)
- 八、总结与展望

每日一句正能量
读懂他人是一种智慧,看清自己才是通透,战胜别人是一种能力,超越自己才是强大。
观察力、共情力,是聪明人的技能。但看清自己更难------需要勇气面对自己的阴暗、局限、真实欲望。看得清自己,才不会被他人的评价轻易带跑。超越自己是无限的游戏------今天比昨天多一分从容,今年比去年少一分内耗,这才是真正由内而外的强大。
摘要
摘要:LoRaWAN作为物联网领域最成熟的LPWAN技术之一,其核心设计哲学是在功耗、距离和实时性之间寻找最优平衡点。本文从协议栈底层出发,深入剖析Class A/B/C三类终端的接收窗口机制差异,详解扩频因子(SF)对通信距离与能耗的量化影响,并给出ADR自适应速率算法的完整实现方案,帮助开发者根据实际场景做出最优的终端选型与参数配置决策。
一、LoRaWAN网络架构与协议栈概览
1.1 星型网络拓扑
LoRaWAN采用经典的星型拓扑结构,终端设备(End Device)通过单跳直接与网关(Gateway)通信,网关再通过IP网络(以太网/4G/卫星)将数据转发至网络服务器(Network Server)和应用服务器(Application Server)。
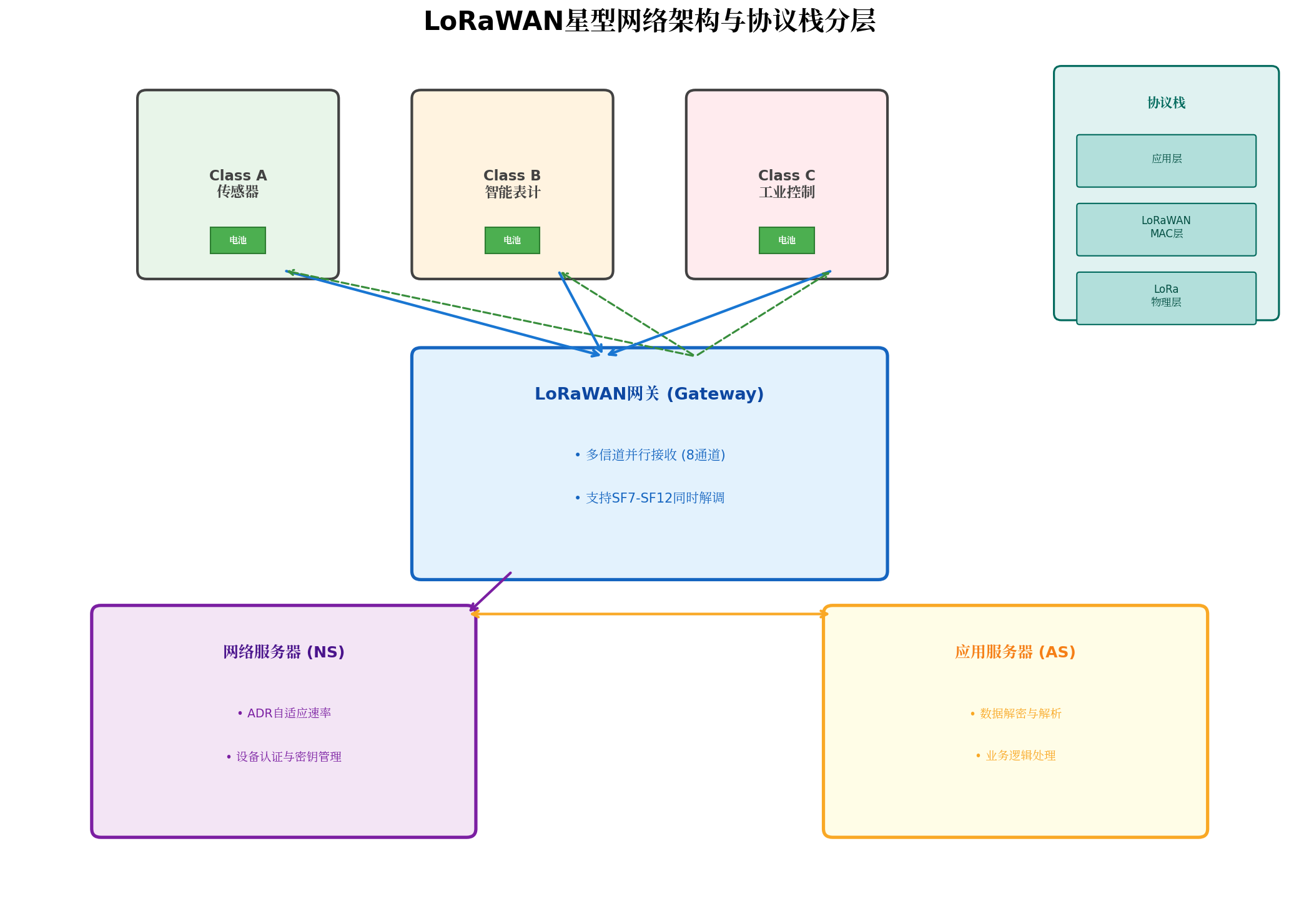
这种架构的优势在于:
- 简化终端设计:无需路由协议,终端仅需维护与网关的单跳链路
- 高容量:单个网关可同时监听8个信道和6种扩频因子(SF7-SF12),支持数千终端并发
- 双向通信:通过接收窗口机制实现下行控制,区别于传统单向LoRa
1.2 协议栈分层模型
LoRaWAN协议栈严格遵循分层设计原则:
┌─────────────────────────────────────────┐
│ 应用层 (Application Layer) │
│ - 传感器数据采集、业务逻辑、数据加密 │
├─────────────────────────────────────────┤
│ LoRaWAN MAC层 │
│ - 帧格式封装、Join入网、ADR、MAC命令 │
├─────────────────────────────────────────┤
│ 区域参数层 (Regional Parameters) │
│ - 信道规划、占空比限制、发射功率法规 │
├─────────────────────────────────────────┤
│ LoRa物理层 (PHY) │
│ - CSS扩频调制、前导码检测、CRC校验 │
└─────────────────────────────────────────┘MAC层是LoRaWAN的核心,负责管理终端与网络之间的所有控制面交互,包括设备入网(OTAA/ABP)、帧计数器管理、自适应速率(ADR)以及各类MAC命令的处理。
二、Class A/B/C终端:功耗与实时性的三重奏
2.1 三类终端的核心差异
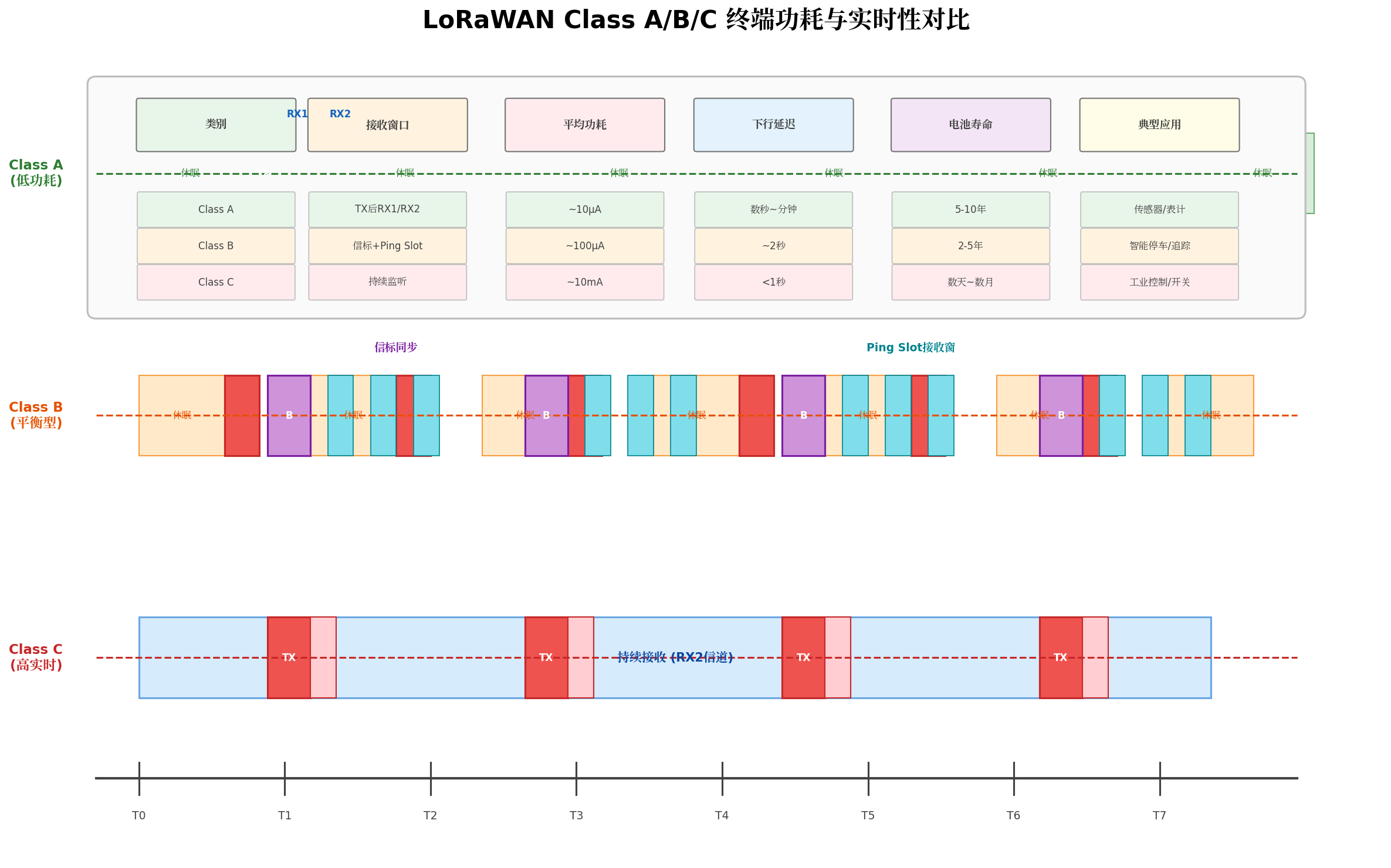
LoRaWAN协议定义了三种终端类别,本质上是功耗 与实时性之间的不同权衡方案:
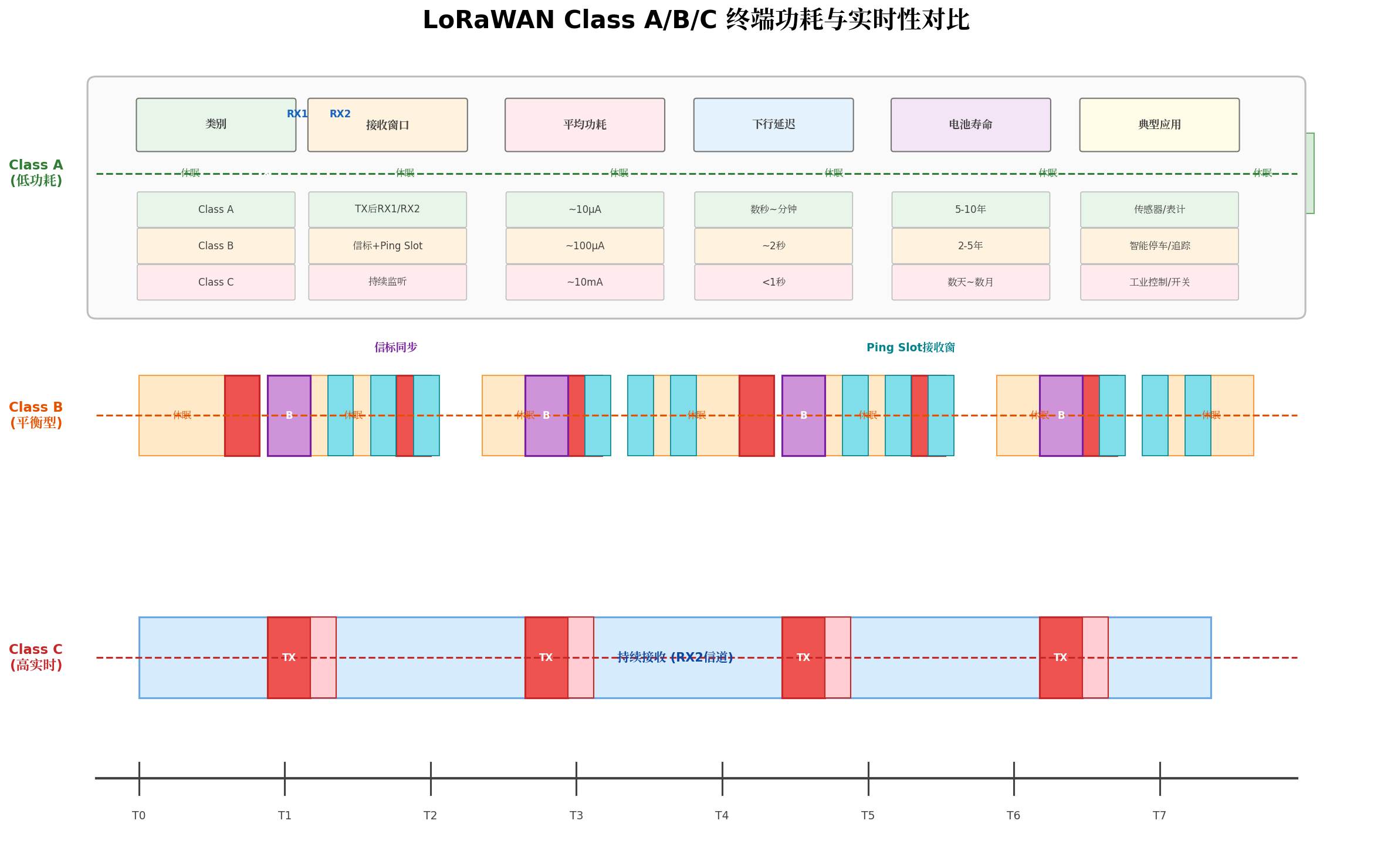
| 特性 | Class A | Class B | Class C |
|---|---|---|---|
| 接收窗口机制 | TX后开启RX1/RX2 | 信标同步+Ping Slot | 持续监听RX2 |
| 平均功耗 | ~10μA(深度休眠) | ~100μA | ~10mA |
| 下行延迟 | 数秒~分钟级 | ~2秒 | <1秒 |
| 电池寿命 | 5-10年(CR2032) | 2-5年 | 数天~数月 |
| 典型应用 | 传感器、智能表计 | 智能停车、资产追踪 | 工业控制、智能开关 |
2.2 Class A:超低功耗的王者
Class A是LoRaWAN的默认工作模式,也是绝大多数电池供电终端的选择。其核心机制是:终端仅在发送上行数据后,短暂开启两个接收窗口(RX1和RX2),其余时间处于深度休眠状态。
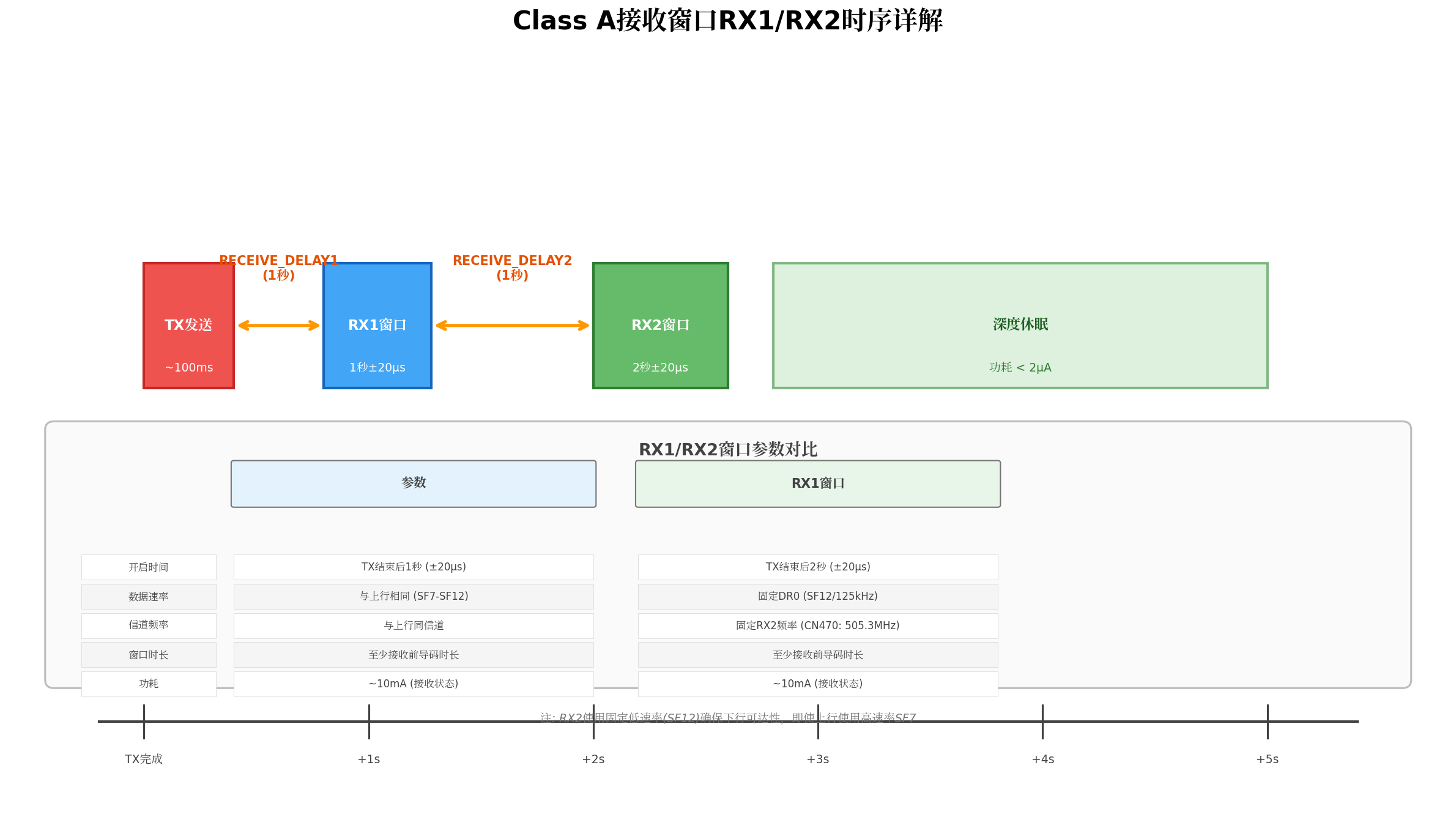
RX1窗口在TX结束后1秒(±20μs)开启,使用与上行相同的数据速率和信道。窗口持续时间至少为一个前导码时长(约5-10个符号周期),以确保能检测到网关发送的下行数据。
RX2窗口在TX结束后2秒开启,使用固定的数据速率(通常为DR0,即SF12/125kHz)和固定的RX2频率(CN470频段为505.3MHz)。RX2使用低速率是为了确保即使上行使用高速率SF7,下行指令依然能够以最高灵敏度被接收。
关键实现细节:
c
/**
* @brief Class A终端发送完成后的接收窗口处理
* @note 必须在TX Done中断中启动定时器
*/
void OnTxDone(void)
{
/* TX Done后立即设置RX1窗口定时器 */
TimerSetValue(&RxWindowTimer1, RX1_DELAY_MS); /* 1000ms */
TimerStart(&RxWindowTimer1);
/* 同时设置RX2窗口定时器 */
TimerSetValue(&RxWindowTimer2, RX2_DELAY_MS); /* 2000ms */
TimerStart(&RxWindowTimer2);
/* 进入低功耗等待 */
EnterLowPowerMode();
}
/**
* @brief RX1窗口回调
*/
void OnRxWindow1TimerEvent(void)
{
/* 切换到上行相同信道和速率 */
Radio.SetChannel(LastTxChannel);
Radio.SetRxConfig(MODEM_LORA, LastTxBandwidth, LastTxDatarate,
LastTxCoderate, 0, 8, RX1_WINDOW_TIMEOUT, false, 0, false, 0, false, true);
Radio.Rx(RX1_WINDOW_TIMEOUT);
}
/**
* @brief RX2窗口回调
*/
void OnRxWindow2TimerEvent(void)
{
/* 切换到RX2固定参数 */
Radio.SetChannel(RX2_CHANNEL_CN470); /* 505.3MHz */
Radio.SetRxConfig(MODEM_LORA, BW_125KHZ, DR_0, /* SF12 */
CR_4_5, 0, 8, RX2_WINDOW_TIMEOUT, false, 0, false, 0, false, true);
Radio.Rx(RX2_WINDOW_TIMEOUT);
}功耗优化要点:
- RX窗口结束后立即进入STOP模式(STM32L4系列约1.2μA)
- 关闭LoRa射频模块的DC-DC稳压器
- 使用RTC定时唤醒替代忙等循环
2.3 Class B:定时唤醒的平衡艺术
Class B在Class A的基础上增加了周期性接收窗口,通过网关广播的**信标(Beacon)**实现时间同步,使网络服务器能够在预定时间向终端发送下行数据。
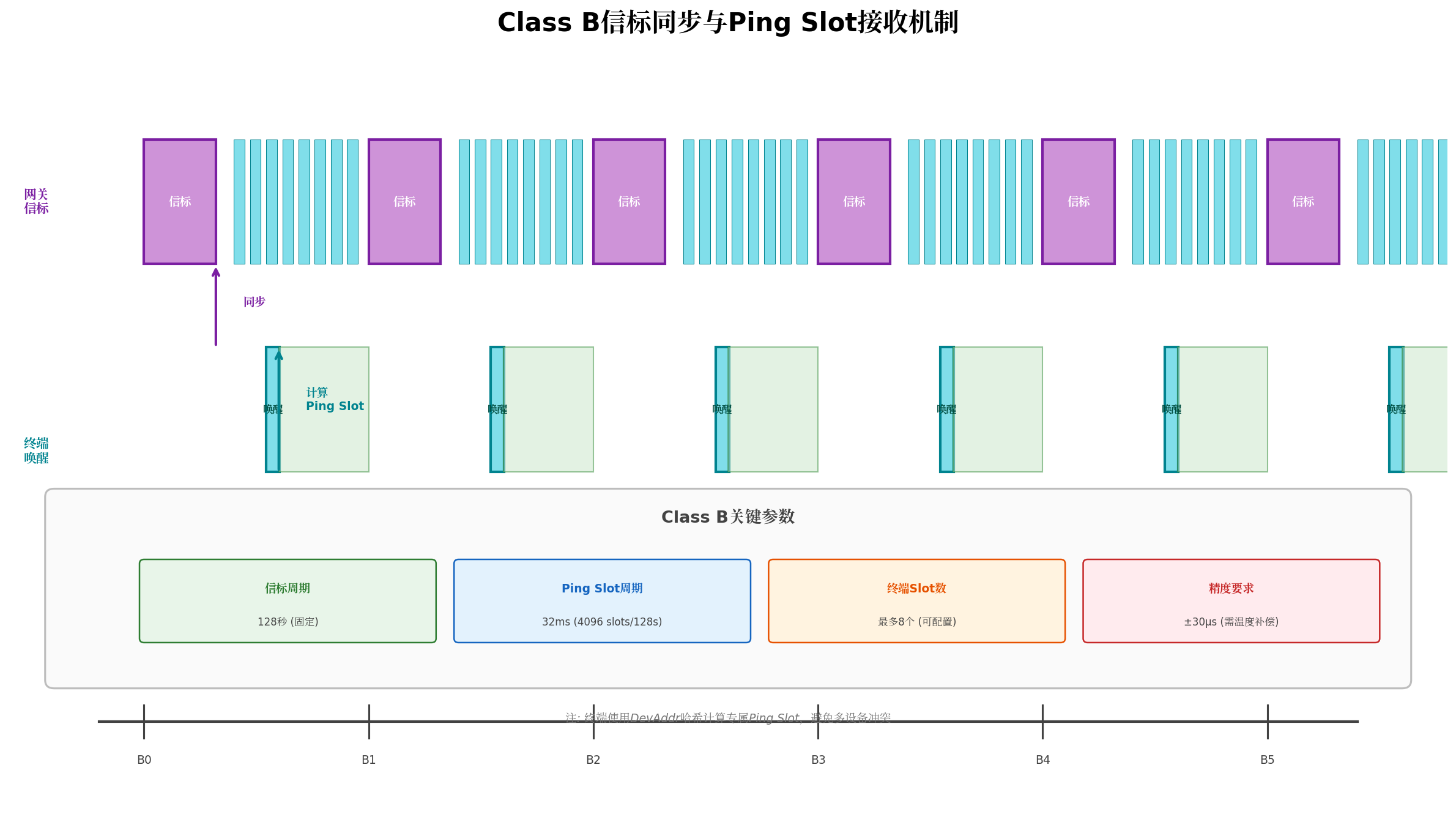
信标机制:
- 网关每128秒发送一次信标帧,包含当前GPS时间
- 终端接收信标后校准本地RTC,确保时间同步精度在±30μs以内
- 信标周期被划分为4096个Ping Slot,每个Slot时长约32ms
Ping Slot分配 :
终端使用自身的DevAddr通过哈希算法计算专属的Ping Slot编号,确保网络中不同终端的接收窗口不会重叠。终端最多可配置8个Ping Slot,在对应时间点唤醒接收下行数据。
c
/**
* @brief 计算终端的Ping Slot编号
* @param devAddr 设备地址
* @param beaconTime 当前信标周期起始时间
* @retval Ping Slot编号 (0-4095)
*/
uint16_t ComputePingSlot(uint32_t devAddr, uint32_t beaconTime)
{
uint32_t hash = 0;
uint8_t *addrBytes = (uint8_t *)&devAddr;
/* 使用FNV-1a哈希算法 */
hash = 2166136261U;
for (int i = 0; i < 4; i++) {
hash ^= addrBytes[i];
hash *= 16777619U;
}
/* 混合信标时间避免长期冲突 */
hash ^= (beaconTime >> 16) & 0xFFFF;
hash *= 16777619U;
return hash % 4096; /* 4096 slots per beacon period */
}Class B的功耗挑战:
- 每128秒需要唤醒接收信标(约200ms,消耗~10mA)
- 每个配置的Ping Slot需要提前唤醒射频预热(约5ms)
- 温度变化会导致RTC漂移,需要定期信标校准
2.4 Class C:实时性的极致追求
Class C终端持续保持接收状态(通常在RX2信道上),仅在发送上行数据时短暂关闭接收。这使得网络服务器可以随时下发指令,下行延迟控制在1秒以内。
功耗代价:
- 接收状态电流约10mA(SX1262典型值)
- 一颗220mAh的CR2032纽扣电池仅能维持约20小时
- 必须外接电源或使用大容量可充电电池
适用场景:
- 智能开关/插座(已接入市电)
- 工业实时控制(有稳定供电)
- 紧急告警设备(可接受频繁换电)
三、扩频因子(SF):距离、速率与功耗的三角博弈
3.1 扩频因子的物理本质
LoRa调制采用**啁啾扩频(Chirp Spread Spectrum, CSS)**技术,扩频因子(Spreading Factor, SF)决定了每个符号携带的比特数。SF取值范围为7-12(部分芯片支持SF6),每增加1级,符号周期翻倍,处理增益增加约2.5dB。
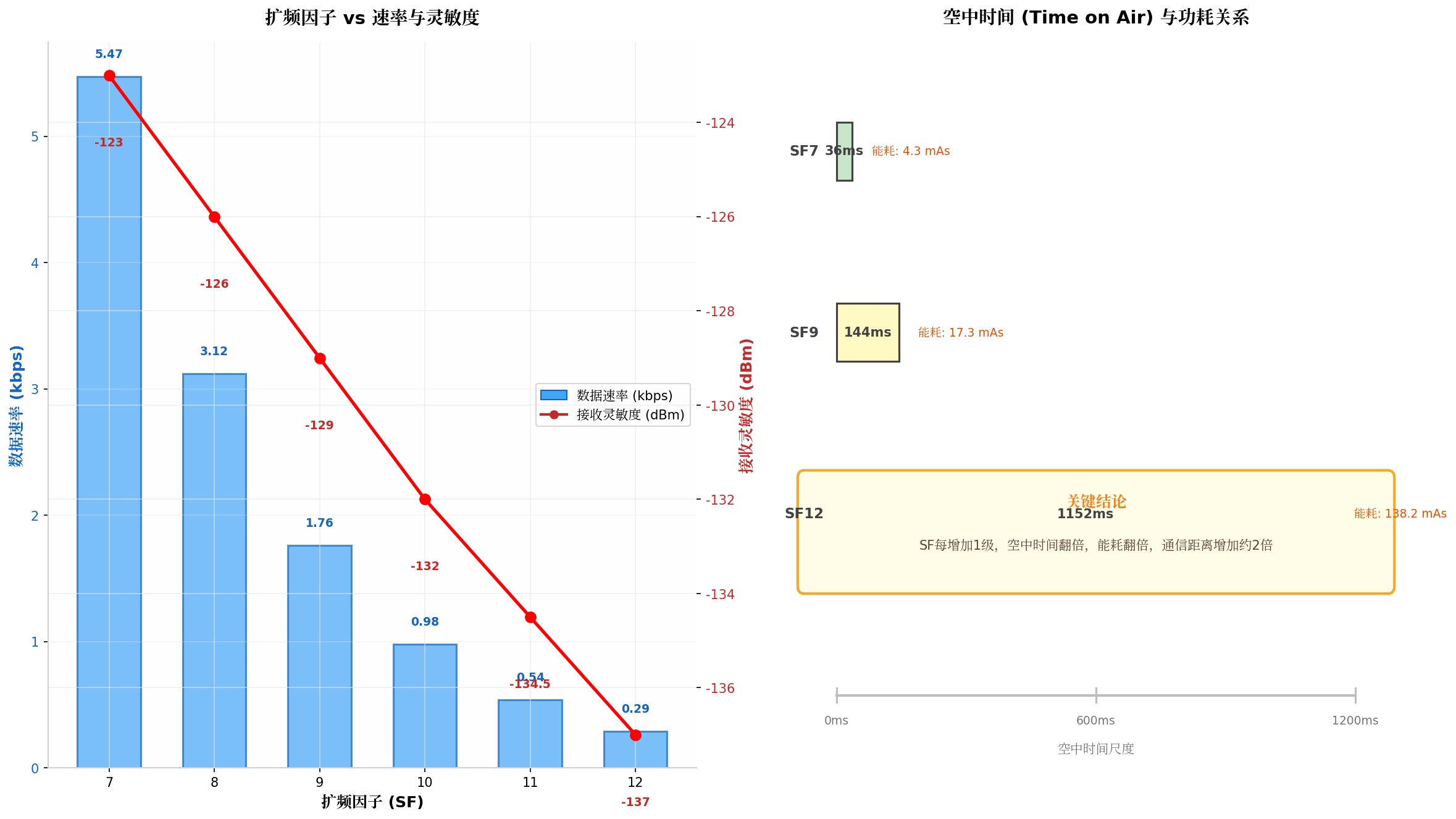
SF与关键参数的量化关系(125kHz带宽,EU868频段):
| SF | 数据速率 | 接收灵敏度 | 空中时间(10字节) | 理论距离 |
|---|---|---|---|---|
| SF7 | 5.47 kbps | -123 dBm | 36 ms | ~2 km |
| SF8 | 3.12 kbps | -126 dBm | 72 ms | ~3 km |
| SF9 | 1.76 kbps | -129 dBm | 144 ms | ~5 km |
| SF10 | 0.98 kbps | -132 dBm | 288 ms | ~8 km |
| SF11 | 0.54 kbps | -134.5 dBm | 576 ms | ~12 km |
| SF12 | 0.29 kbps | -137 dBm | 1152 ms | ~15 km |
核心规律:
- SF每增加1级,数据速率减半,空中时间翻倍
- SF每增加1级,接收灵敏度提升约2.5dB,通信距离增加约1.4-2倍
- SF每增加1级,发送同等数据的能耗约翻倍
3.2 空中时间(Time on Air)计算
空中时间是衡量LoRaWAN终端能耗的核心指标,直接决定了射频模块的工作时长:
T p a c k e t = T p r e a m b l e + T p a y l o a d T_{packet} = T_{preamble} + T_{payload} Tpacket=Tpreamble+Tpayload
其中:
- 前导码时长: T p r e a m b l e = ( N p r e a m b l e + 4.25 ) × T s y m T_{preamble} = (N_{preamble} + 4.25) \times T_{sym} Tpreamble=(Npreamble+4.25)×Tsym
- 有效载荷时长: T p a y l o a d = N p a y l o a d × T s y m T_{payload} = N_{payload} \times T_{sym} Tpayload=Npayload×Tsym
- 符号周期: T s y m = 2 S F B W T_{sym} = \frac{2^{SF}}{BW} Tsym=BW2SF
以SF12、125kHz带宽、10字节payload为例:
- T s y m = 2 12 / 125000 = 32.77 T_{sym} = 2^{12} / 125000 = 32.77 Tsym=212/125000=32.77 ms
- T p r e a m b l e = ( 8 + 4.25 ) × 32.77 = 401 T_{preamble} = (8 + 4.25) \times 32.77 = 401 Tpreamble=(8+4.25)×32.77=401 ms
- T p a y l o a d = 23 × 32.77 = 754 T_{payload} = 23 \times 32.77 = 754 Tpayload=23×32.77=754 ms
- 总空中时间约1155 ms(>1秒)
这意味着在SF12下发送一个10字节的数据包,射频模块需要持续工作超过1秒,消耗约120mA × 1.155s = 138.6 mAs的能量。
3.3 SF选择的工程实践
在实际部署中,SF的选择需要综合考虑以下因素:
- 链路预算:计算路径损耗,确保接收端SNR满足解调门限
- 占空比限制:EU868规定每信道占空比不超过1%,SF12的长空中时间更容易触发限制
- 网络容量:高SF占用信道时间更长,降低整体网络容量
- 电池寿命:高SF直接导致能耗翻倍,缩短电池寿命
推荐策略:
- 城区密集部署:优先使用SF7-SF9,缩短空中时间
- 郊区远距离:使用SF10-SF11,平衡距离与能耗
- SF12仅作为极端边缘覆盖的最后手段
四、ADR自适应速率:智能网络的自优化引擎
4.1 ADR的设计目标
自适应数据速率(Adaptive Data Rate, ADR)是LoRaWAN协议的核心创新之一,其目标是在保证通信可靠性的前提下,最大化网络容量并延长终端电池寿命。
ADR的核心思想是:"离网关近就讲快话,离得远就说慢话"------网络服务器根据终端上报的链路质量指标,动态调整每个终端的扩频因子和发射功率。
4.2 ADR算法详解
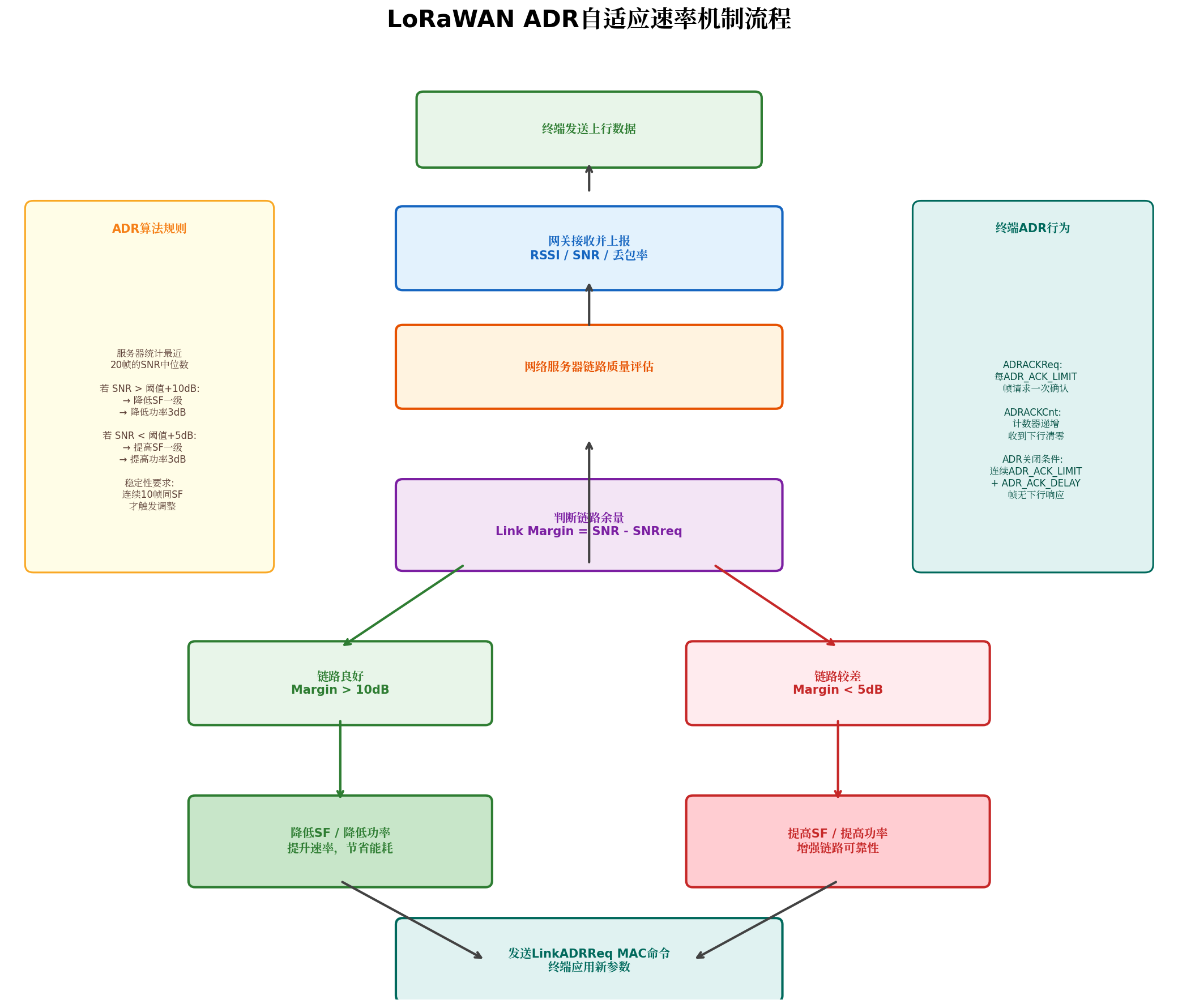
ADR算法由网络服务器主导,基于以下链路质量指标进行决策:
1. 链路余量(Link Margin)计算:
L i n k M a r g i n = S N R m e a s u r e d − S N R r e q u i r e d ( S F ) LinkMargin = SNR_{measured} - SNR_{required}(SF) LinkMargin=SNRmeasured−SNRrequired(SF)
其中 S N R r e q u i r e d ( S F ) SNR_{required}(SF) SNRrequired(SF)是各SF的解调门限:
- SF7: -7.5 dB
- SF8: -10 dB
- SF9: -12.5 dB
- SF10: -15 dB
- SF11: -17.5 dB
- SF12: -20 dB
2. ADR决策逻辑:
c
/**
* @brief ADR算法核心逻辑(网络服务器端)
* @param snrHistory 最近20帧的SNR中位数
* @param currentSF 当前扩频因子
* @param currentTxPower 当前发射功率
*/
void ADR_Algorithm(int16_t snrHistory[20], uint8_t *currentSF, int8_t *currentTxPower)
{
/* 计算SNR中位数 */
int16_t snrMedian = CalculateMedian(snrHistory, 20);
/* 计算当前SF所需的SNR门限 */
int16_t snrRequired = GetSNRThreshold(*currentSF);
/* 计算链路余量 */
int16_t linkMargin = snrMedian - snrRequired;
/* 决策逻辑 */
if (linkMargin > 10) {
/* 链路余量充足,可降低SF或功率 */
if (*currentSF > SF7) {
*currentSF -= 1; /* 降低SF一级 */
*currentTxPower = MIN(*currentTxPower + 3, MAX_TX_POWER);
} else if (*currentTxPower > MIN_TX_POWER) {
*currentTxPower -= 3; /* 降低功率3dB */
}
} else if (linkMargin < 5) {
/* 链路余量不足,需提高SF或功率 */
if (*currentSF < SF12) {
*currentSF += 1; /* 提高SF一级 */
*currentTxPower = MAX(*currentTxPower - 3, MIN_TX_POWER);
} else if (*currentTxPower < MAX_TX_POWER) {
*currentTxPower += 3; /* 提高功率3dB */
}
}
/* 5dB <= linkMargin <= 10dB: 维持当前参数 */
}3. 稳定性约束:
- 服务器需观察连续10帧稳定的链路质量才触发ADR调整
- 避免频繁切换导致网络不稳定
- 终端通过
ADRACKReq位请求网络确认链路状态
4.3 终端端ADR实现
终端通过MAC命令LinkADRReq接收服务器的参数调整指令,并回复LinkADRAns确认:
c
/**
* @brief 处理LinkADRReq MAC命令
* @param payload MAC命令载荷
* @retval 处理结果
*/
int8_t ProcessLinkADRReq(uint8_t *payload)
{
uint8_t datarate = (payload[0] >> 4) & 0x0F; /* 数据速率 */
uint8_t txPower = payload[0] & 0x0F; /* 发射功率 */
uint16_t chMask = (payload[2] << 8) | payload[1]; /* 信道掩码 */
uint8_t redundancy = payload[3];
uint8_t chMaskCntl = (redundancy >> 4) & 0x07;
uint8_t nbTrans = redundancy & 0x0F; /* 重传次数 */
uint8_t status = 0x07; /* 默认全部接受 */
/* 验证数据速率 */
if (datarate > GetMaxDatarate(Region)) {
status &= ~0x04; /* DataRate ACK = 0 */
}
/* 验证发射功率 */
if (txPower > GetMaxTxPower(Region)) {
status &= ~0x02; /* Power ACK = 0 */
}
/* 验证信道掩码 */
if (!ValidateChannelMask(chMask, chMaskCntl)) {
status &= ~0x01; /* ChannelMask ACK = 0 */
}
/* 如果全部验证通过,应用新参数 */
if (status == 0x07) {
ApplyDataRate(datarate);
ApplyTxPower(txPower);
ApplyChannelMask(chMask, chMaskCntl);
ApplyNbTrans(nbTrans);
}
return status;
}4.4 ADR的边界条件
ADR并非万能,以下场景需要特别注意:
- 移动设备:车辆、人员携带的设备信号变化快,ADR可能频繁调整甚至失效,建议关闭ADR
- 多径环境:城市峡谷、室内环境信号波动大,需增加ADR观察窗口
- 法规限制:某些地区对发射功率有严格限制,ADR的功率调整可能触发合规问题
五、功耗建模与电池寿命估算
5.1 Class A终端能耗模型
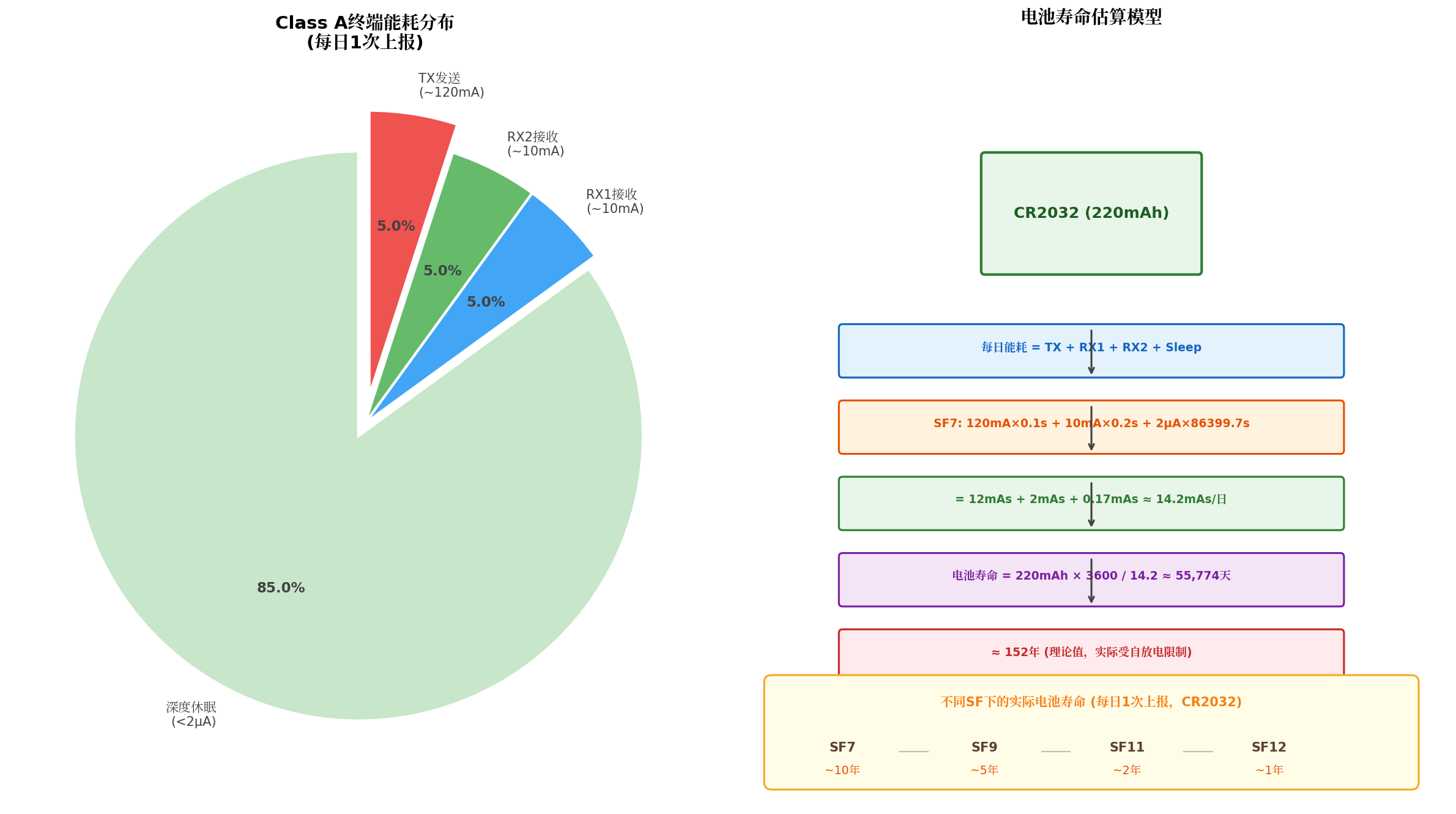
Class A终端的典型工作周期包含四个阶段:
| 阶段 | 电流 | 时长 | 单次能耗 |
|---|---|---|---|
| TX发送 | ~120 mA | 100 ms (SF7) | 12 mAs |
| RX1接收 | ~10 mA | 200 ms | 2 mAs |
| RX2接收 | ~10 mA | 200 ms | 2 mAs |
| 深度休眠 | ~2 μA | 其余时间 | 0.17 mAs/日 |
每日总能耗 (SF7,每日上报1次):
E d a i l y = 12 + 2 + 2 + 0.17 ≈ 16.2 mAs E_{daily} = 12 + 2 + 2 + 0.17 \approx 16.2 \text{ mAs} Edaily=12+2+2+0.17≈16.2 mAs
CR2032电池(220mAh)理论寿命 :
T l i f e = 220 × 3600 16.2 ≈ 48 , 888 天 ≈ 134 年 T_{life} = \frac{220 \times 3600}{16.2} \approx 48,888 \text{ 天} \approx 134 \text{ 年} Tlife=16.2220×3600≈48,888 天≈134 年
实际寿命受电池自放电(约1%/年)、温度、脉冲电流限制等因素影响,实际可达5-10年。
SF对电池寿命的影响:
| SF | 空中时间 | 单次TX能耗 | 实际电池寿命 |
|---|---|---|---|
| SF7 | 36 ms | 4.3 mAs | ~10年 |
| SF9 | 144 ms | 17.3 mAs | ~5年 |
| SF11 | 576 ms | 69.1 mAs | ~2年 |
| SF12 | 1152 ms | 138.2 mAs | ~1年 |
5.2 功耗优化策略
1. 数据聚合
将多次采样数据打包在一次传输中,减少TX次数:
c
/**
* @brief 数据聚合发送
* @note 每10次采样打包发送一次,降低90%的TX开销
*/
void AggregatedSend(void)
{
static SensorData_t buffer[10];
static uint8_t idx = 0;
buffer[idx++] = ReadSensor();
if (idx >= 10) {
/* 压缩打包 */
uint8_t compressed[32];
uint8_t len = CompressData(buffer, 10, compressed);
LoRaWAN_Send(compressed, len, UNCONFIRMED);
idx = 0;
}
}2. 确认机制权衡
- 非确认上行(UNCONFIRMED):无RX窗口等待,最低功耗
- 确认上行(CONFIRMED):需要等待ACK,增加RX窗口开销
- 建议:数据上报使用UNCONFIRMED,关键指令使用CONFIRMED
3. 温度补偿
RTC晶振频率随温度漂移,影响RX窗口定时精度。在Class B中,温度补偿是确保信标同步的关键:
c
/**
* @brief RTC温度补偿
* @param tempC 当前温度(摄氏度)
*/
void RTC_TemperatureCompensation(int16_t tempC)
{
/* 32.768kHz晶振典型温度系数: -0.04 ppm/°C² */
int32_t drift_ppm = ((tempC - 25) * (tempC - 25)) * (-4) / 100;
int32_t compensation = (drift_ppm * RX_WINDOW_MARGIN_US) / 1000000;
TimerSetRxWindowMargin(RX_WINDOW_MARGIN_US + compensation);
}六、LoRaWAN终端软件架构实现
6.1 协议栈分层架构
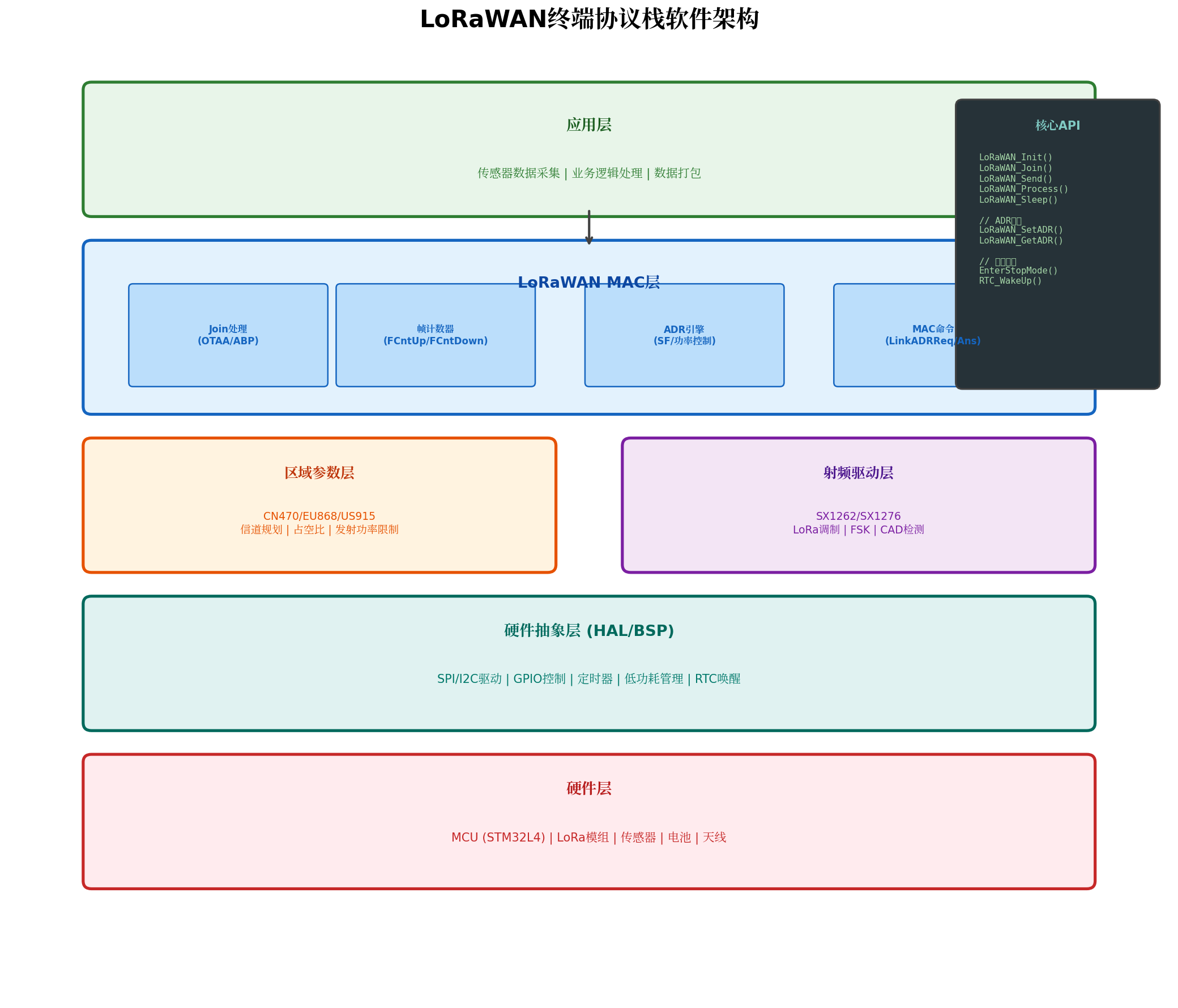
基于开源协议栈(如LoRaMAC-node)的实现通常采用以下分层:
应用层:负责传感器数据采集、业务逻辑处理和LoRaWAN帧的封装/解析。
MAC层:实现LoRaWAN协议的核心功能:
- Join处理:OTAA入网流程(Join Request/Accept)和ABP预配置
- 帧计数器:FCntUp和FCntDown的递增与验证(防重放攻击)
- ADR引擎:根据网络服务器指令调整SF和功率
- MAC命令:处理LinkADRReq、DevStatusReq等控制命令
区域参数层:封装不同地区的法规要求:
- CN470:470-510MHz,96个上行信道,最大发射功率17dBm
- EU868:868MHz,3个默认信道,占空比限制1%
- US915:915MHz,64个125kHz上行信道+8个500kHz信道
射频驱动层:通过SPI接口控制SX1262/SX1276等LoRa模组:
- 配置调制参数(SF/BW/CR)
- 发送/接收状态机管理
- CAD(Channel Activity Detection)检测
6.2 状态机设计
c
typedef enum {
DEVICE_STATE_INIT = 0,
DEVICE_STATE_JOIN,
DEVICE_STATE_SEND,
DEVICE_STATE_CYCLE,
DEVICE_STATE_SLEEP
} DeviceState_t;
DeviceState_t deviceState = DEVICE_STATE_INIT;
void LoRaWAN_Process(void)
{
switch (deviceState) {
case DEVICE_STATE_INIT:
LoRaWAN_Init();
deviceState = DEVICE_STATE_JOIN;
break;
case DEVICE_STATE_JOIN:
if (LoRaWAN_Join(OTAA) == LORAMAC_STATUS_OK) {
deviceState = DEVICE_STATE_CYCLE;
}
break;
case DEVICE_STATE_SEND:
PrepareTxFrame();
LoRaWAN_Send(txBuffer, txBufferSize, UNCONFIRMED);
deviceState = DEVICE_STATE_CYCLE;
break;
case DEVICE_STATE_CYCLE:
/* 计算下一次发送时间 */
TxDutyCycleTime = APP_TX_DUTYCYCLE + randr(-APP_TX_DUTYCYCLE_RND, APP_TX_DUTYCYCLE_RND);
TimerSetValue(&TxNextPacketTimer, TxDutyCycleTime);
TimerStart(&TxNextPacketTimer);
deviceState = DEVICE_STATE_SLEEP;
break;
case DEVICE_STATE_SLEEP:
/* 进入低功耗,等待RTC唤醒或射频中断 */
EnterStopMode();
break;
}
}七、终端选型决策矩阵
7.1 决策流程
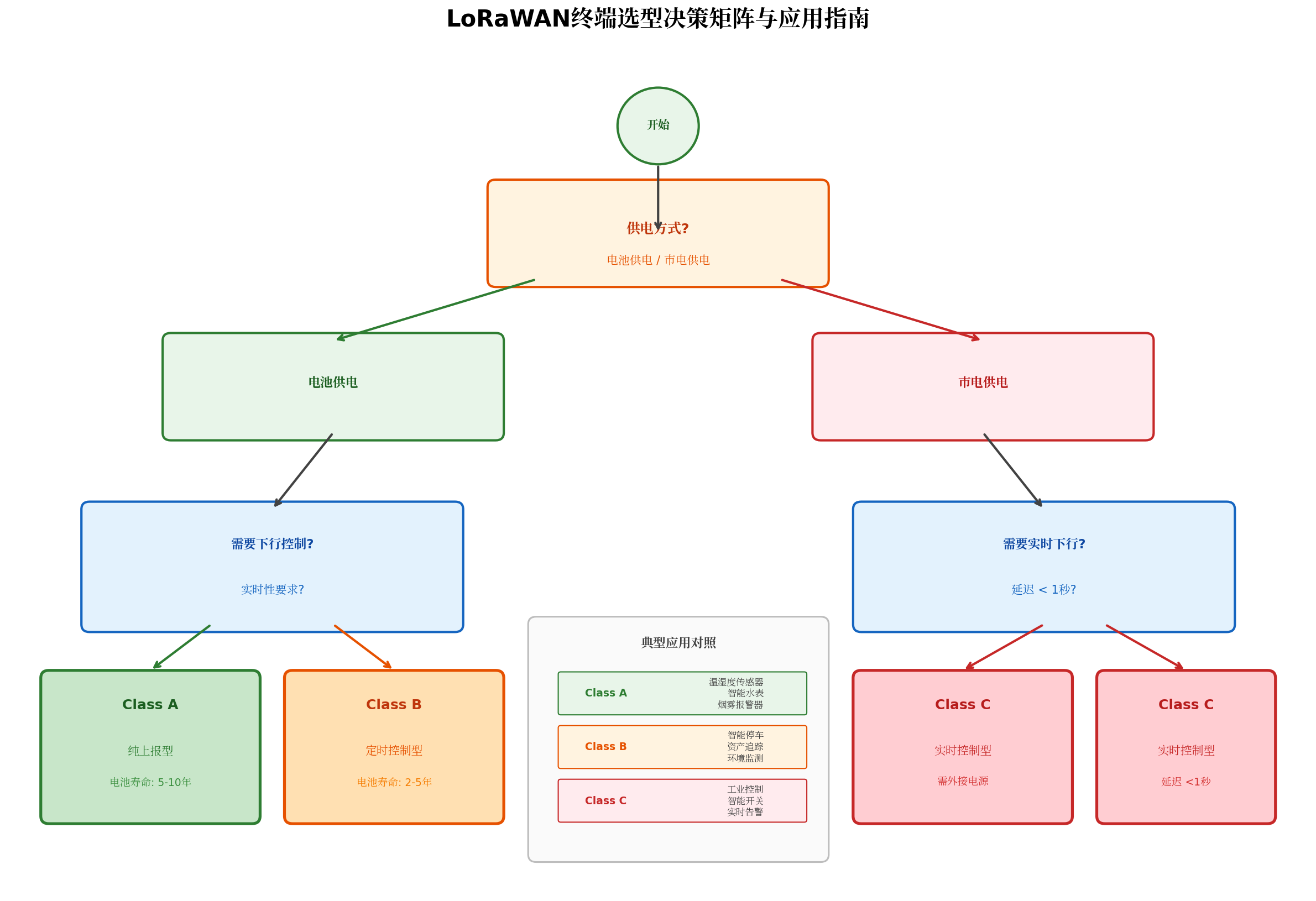
选择终端类别的决策流程:
第一步:供电方式
- 电池供电 → 优先考虑Class A或Class B
- 市电供电 → 可选择Class C
第二步:下行实时性需求
- 无需下行或延迟可接受(分钟级)→ Class A
- 需要定时下行控制(秒级)→ Class B
- 需要实时下行控制(<1秒)→ Class C
第三步:功耗预算验证
- 计算预期电池寿命是否满足产品要求
- 必要时通过ADR优化降低SF
7.2 典型应用场景对照
| 应用场景 | 推荐类别 | 推荐SF | ADR策略 | 电池寿命 |
|---|---|---|---|---|
| 温湿度传感器 | Class A | SF7-SF9 | 开启 | 5-10年 |
| 智能水表/气表 | Class A | SF8-SF10 | 开启 | 5-8年 |
| 智能停车地磁 | Class B | SF7-SF9 | 开启 | 3-5年 |
| 资产追踪器 | Class B | SF9-SF11 | 移动时关闭 | 2-3年 |
| 工业阀门控制 | Class C | SF7-SF9 | 开启 | 市电供电 |
| 智能路灯控制 | Class C | SF7-SF8 | 开启 | 市电供电 |
八、总结与展望
LoRaWAN协议通过Class A/B/C三类终端的差异化设计,在功耗与实时性之间提供了灵活的权衡方案。扩频因子作为物理层的核心调节旋钮,直接影响通信距离、数据速率和能耗三者的平衡。ADR自适应速率机制则为大规模部署提供了网络自优化的能力。
关键结论:
- Class A是电池供电场景的首选,通过RX1/RX2窗口机制实现最低功耗,适合绝大多数传感器应用
- Class B适用于需要定时下行控制的场景,信标同步机制在功耗和实时性之间取得平衡
- Class C仅适用于市电供电的实时控制场景,持续接收的功耗代价不可忽视
- SF选择遵循"够用即可"原则,过高的SF不仅降低速率,更直接翻倍能耗
- ADR应作为默认配置开启,但移动设备需要特殊处理
随着LoRaWAN 1.1和Regional Parameters 1.0.3的演进,协议在安全性(引入JS、AS分离)、漫游支持和多播能力方面持续增强。在HarmonyOS等分布式操作系统的生态中,LoRaWAN终端可以作为"远场感知节点",通过网关接入分布式软总线,实现与近场设备的协同感知与智能决策,为万物互联提供更广阔的可能性。
转载自:https://blog.csdn.net/u014727709/article/details/162542020
欢迎 👍点赞✍评论⭐收藏,欢迎指正