文章目录
-
- 每日一句正能量
- 摘要
- 一、引言:为什么嵌入式系统需要DVFS
- 二、DVFS系统架构与电压域划分
-
- [2.1 系统架构分层](#2.1 系统架构分层)
- [2.2 电压域划分策略](#2.2 电压域划分策略)
- 三、工作性能点(OPP)表设计
-
- [3.1 OPP表结构](#3.1 OPP表结构)
- [3.2 功耗模型与能效分析](#3.2 功耗模型与能效分析)
- [3.3 OPP表代码实现](#3.3 OPP表代码实现)
- 四、DVFS策略算法
-
- [4.1 策略对比与选择](#4.1 策略对比与选择)
- [4.2 负载计算算法](#4.2 负载计算算法)
- [4.3 ondemand策略实现](#4.3 ondemand策略实现)
- 五、安全切换时序
-
- [5.1 核心原则:先升压后升频,先降频后降压](#5.1 核心原则:先升压后升频,先降频后降压)
- [5.2 安全切换代码实现](#5.2 安全切换代码实现)
- [5.3 逐级调节策略](#5.3 逐级调节策略)
- 六、温度补偿与热管理
-
- [6.1 温度对DVFS的影响](#6.1 温度对DVFS的影响)
- [6.2 温度补偿实现](#6.2 温度补偿实现)
- [七、嵌入式MCU DVFS实现](#七、嵌入式MCU DVFS实现)
-
- [7.1 系统架构](#7.1 系统架构)
- [7.2 STM32 DVFS完整驱动](#7.2 STM32 DVFS完整驱动)
- [八、鸿蒙OS DVFS集成](#八、鸿蒙OS DVFS集成)
-
- [8.1 鸿蒙OS功耗管理框架](#8.1 鸿蒙OS功耗管理框架)
- [8.2 不同场景DVFS策略](#8.2 不同场景DVFS策略)
- 九、调试与验证
-
- [9.1 DVFS调试要点](#9.1 DVFS调试要点)
- [9.2 验证测试](#9.2 验证测试)
- 十、总结与展望
每日一句正能量
每一条走上来的路都有其不得不跋涉的理由。
每个人的经历都是必要的,哪怕绕远、跌倒,也有它出现在你生命中的理由。不必羡慕他人的坦途,你走过的每一步都塑造了此刻的你。
摘要
摘要: 在电池供电与功耗敏感的嵌入式系统中,动态电压频率调节(DVFS)是实现性能与功耗平衡的核心技术。本文深入剖析DVFS的理论基础与功耗模型,系统讲解电压域划分策略与工作性能点(OPP)表设计,详细阐述升频/降频的安全切换时序,并结合STM32与鸿蒙OS的实战案例,提供完整的驱动代码、策略算法与热管理方案,助力开发者构建高效能的嵌入式功耗管理系统。
一、引言:为什么嵌入式系统需要DVFS
现代嵌入式设备面临一个永恒的矛盾:性能需求不断增长,而功耗预算日益紧缩。以智能手表为例,用户期望流畅的UI交互(需要高性能),同时要求数天的续航时间(需要低功耗)。静态的固定频率/电压设计无法同时满足这两个需求。
DVFS(Dynamic Voltage and Frequency Scaling)技术的核心思想是:根据系统负载动态调整CPU的工作电压和频率,在需要性能时提供高频率,在空闲时降低频率以节省功耗。其理论依据是CMOS电路的功耗公式:
P t o t a l = P d y n a m i c + P s t a t i c = C ⋅ V 2 ⋅ f + V ⋅ I l e a k P_{total} = P_{dynamic} + P_{static} = C \cdot V^2 \cdot f + V \cdot I_{leak} Ptotal=Pdynamic+Pstatic=C⋅V2⋅f+V⋅Ileak
从公式可以看出:
- 动态功耗 与电压平方和频率成正比( V 2 ⋅ f V^2 \cdot f V2⋅f)
- 静态功耗与漏电流相关,而漏电流随电压指数增长
这意味着,将电压从1.2V降至0.8V、频率从480MHz降至100MHz,动态功耗可降低约**85%**以上。
在实际项目中,我曾遇到以下典型场景:
- 场景1:某工业网关设备,24小时运行,CPU大部分时间空闲,但需定期处理数据突发。固定高频运行导致散热困难,固定低频又无法满足突发计算需求
- 场景2:某鸿蒙IoT设备,使用LiteOS内核,需要在分布式软总线通信时快速响应,平时保持极低功耗
- 场景3:某车载ECU,工作温度范围-40°C~125°C,高温时需要降频防止过热,低温时可适当超频
这些场景共同指向DVFS技术的必要性。
二、DVFS系统架构与电压域划分
2.1 系统架构分层
DVFS系统通常分为三个层次:
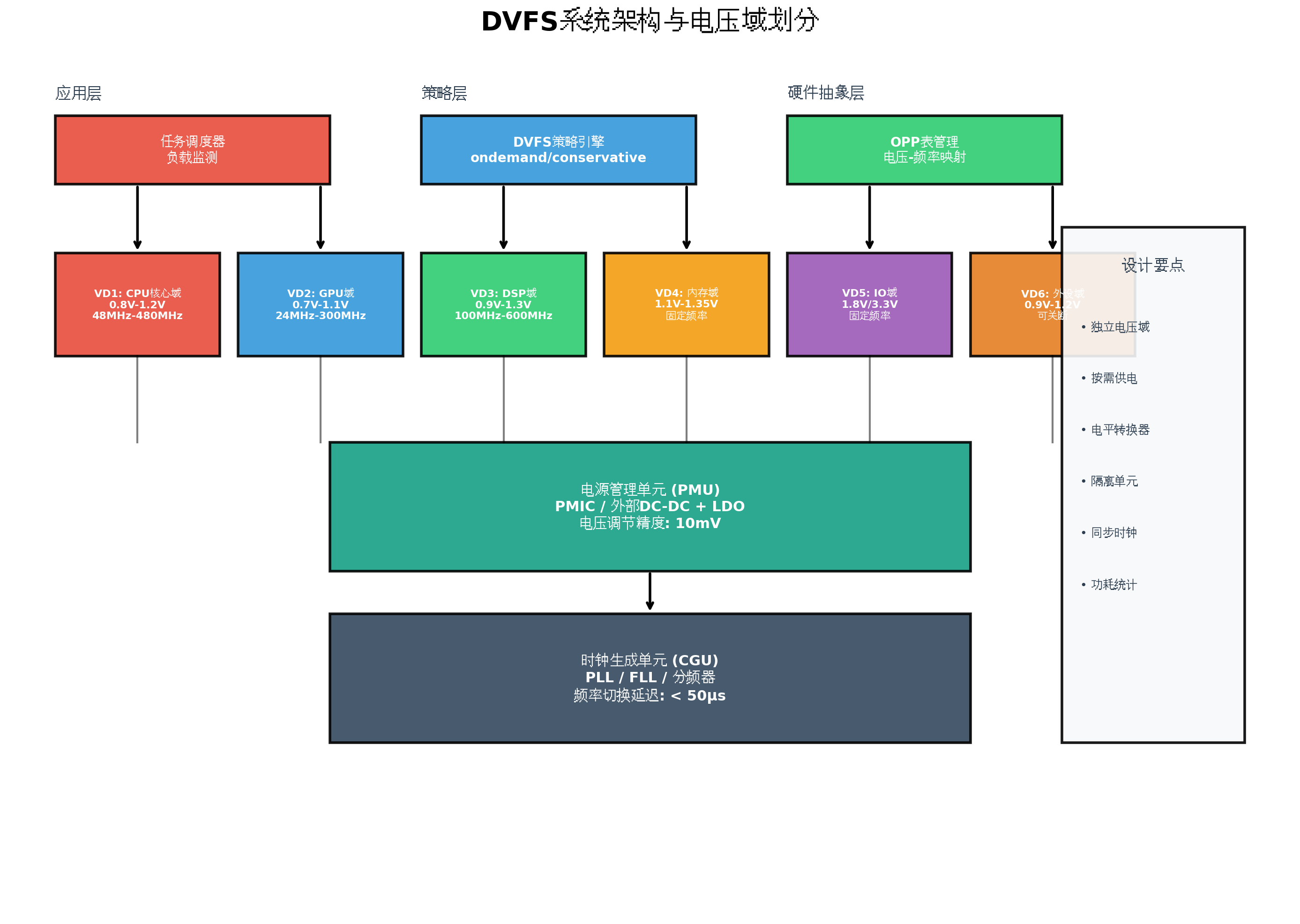
应用层:负责任务负载监测和功耗统计,通过API向策略层反馈业务需求。
策略层:实现DVFS调度算法(ondemand、conservative、performance等),根据负载、温度、业务场景决策目标OPP。
硬件抽象层:管理OPP表(Operating Performance Point),执行电压-频率切换,配置PLL/PMU。
2.2 电压域划分策略
复杂SoC通常包含多个电压域(Voltage Domain),每个域可独立调节电压:
| 电压域 | 供电对象 | 电压范围 | 频率范围 | 调节策略 |
|---|---|---|---|---|
| VD1: CPU核心域 | Cortex-M4/M7 | 0.8V-1.2V | 48MHz-480MHz | 负载自适应 |
| VD2: GPU域 | 图形加速器 | 0.7V-1.1V | 24MHz-300MHz | 渲染负载 |
| VD3: DSP域 | 数字信号处理器 | 0.9V-1.3V | 100MHz-600MHz | 算法需求 |
| VD4: 内存域 | DDR/Flash | 1.1V-1.35V | 固定 | 温度补偿 |
| VD5: IO域 | GPIO/UART/SPI | 1.8V/3.3V | 固定 | 固定供电 |
| VD6: 外设域 | 传感器/ADC | 0.9V-1.2V | 可关断 | 按需供电 |
电压域设计要点:
- 独立调节:每个域有独立的电源轨,避免互相干扰
- 电平转换:跨域信号需要Level Shifter,防止短路电流
- 同步时钟:跨域时钟需保持整数倍关系,避免亚稳态
- 隔离单元:电源关断域需要Isolation Cell,防止浮空节点
三、工作性能点(OPP)表设计
3.1 OPP表结构
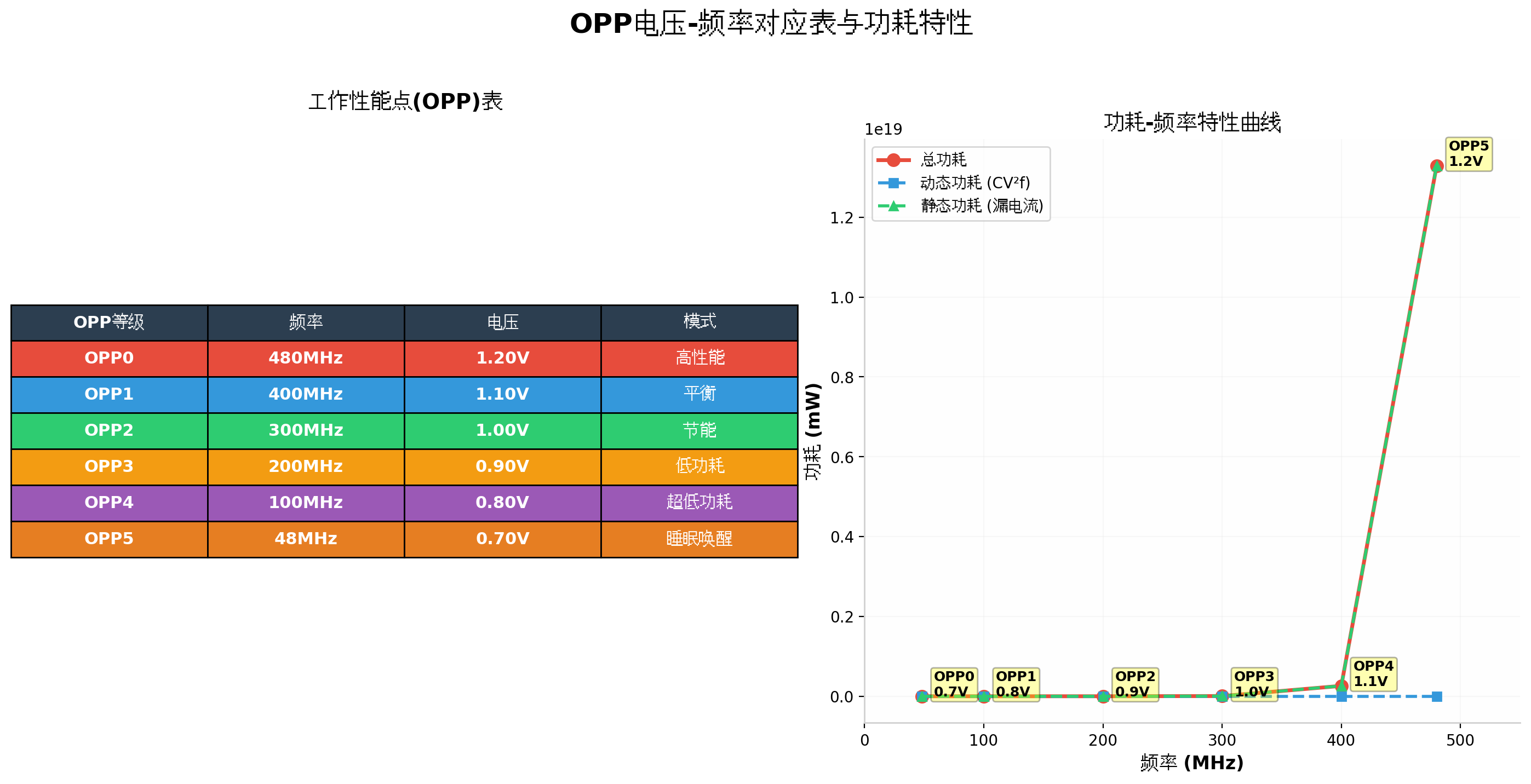
OPP表是DVFS系统的核心数据结构,定义了每个电压-频率组合点:
OPP表设计原则:
- 电压裕量:每个频率对应的电压需保留5-10%裕量,补偿工艺偏差、温度漂移和老化
- 单调递增:频率与电压必须单调递增,避免无效组合
- 测试验证:每个OPP点需通过高低温测试、老化测试验证稳定性
- 最小粒度:相邻OPP点间隔建议20-50MHz,避免频繁切换
3.2 功耗模型与能效分析
从OPP表可以分析不同工作点的能效特性:
| OPP等级 | 频率 | 电压 | 动态功耗 | 静态功耗 | 总功耗 | 能效比 |
|---|---|---|---|---|---|---|
| OPP0 | 480MHz | 1.20V | 100% | 100% | 100% | 1.00 |
| OPP1 | 400MHz | 1.10V | 69% | 67% | 68% | 1.18 |
| OPP2 | 300MHz | 1.00V | 39% | 42% | 40% | 1.50 |
| OPP3 | 200MHz | 0.90V | 19% | 25% | 20% | 2.00 |
| OPP4 | 100MHz | 0.80V | 5% | 11% | 6% | 3.33 |
| OPP5 | 48MHz | 0.70V | 1% | 5% | 2% | 4.00 |
关键发现 :OPP4(100MHz/0.8V)的能效比是OPP0(480MHz/1.2V)的3.3倍,说明在中低负载下使用低频率可以显著提升能效。
3.3 OPP表代码实现
c
/* OPP表结构定义 */
typedef struct {
uint32_t freq_khz; /* 频率 (kHz) */
uint32_t voltage_uv; /* 电压 (μV) */
uint32_t power_mw; /* 典型功耗 (mW) */
const char *name; /* 性能点名称 */
} opp_entry_t;
/* STM32H7系列OPP表 */
static const opp_entry_t stm32h7_opp_table[] = {
{480000, 1200000, 450, "OPP0_HighPerf"}, /* 480MHz / 1.2V */
{400000, 1100000, 310, "OPP1_Balanced"}, /* 400MHz / 1.1V */
{300000, 1000000, 180, "OPP2_Efficient"}, /* 300MHz / 1.0V */
{200000, 900000, 90, "OPP3_LowPower"}, /* 200MHz / 0.9V */
{100000, 800000, 30, "OPP4_UltraLow"}, /* 100MHz / 0.8V */
{ 48000, 700000, 10, "OPP5_SleepWake"}, /* 48MHz / 0.7V */
};
#define OPP_COUNT (sizeof(stm32h7_opp_table) / sizeof(stm32h7_opp_table[0]))
/* 当前OPP索引 */
static int current_opp_idx = 0;
/* 查找目标OPP */
static int dvfs_find_opp(uint32_t target_freq_khz) {
for (int i = 0; i < OPP_COUNT; i++) {
if (stm32h7_opp_table[i].freq_khz >= target_freq_khz) {
return i;
}
}
return OPP_COUNT - 1; /* 返回最高OPP */
}
/* 获取OPP信息 */
const opp_entry_t *dvfs_get_opp(int idx) {
if (idx >= 0 && idx < OPP_COUNT) {
return &stm32h7_opp_table[idx];
}
return NULL;
}四、DVFS策略算法
4.1 策略对比与选择
DVFS策略决定了如何根据负载选择目标频率:
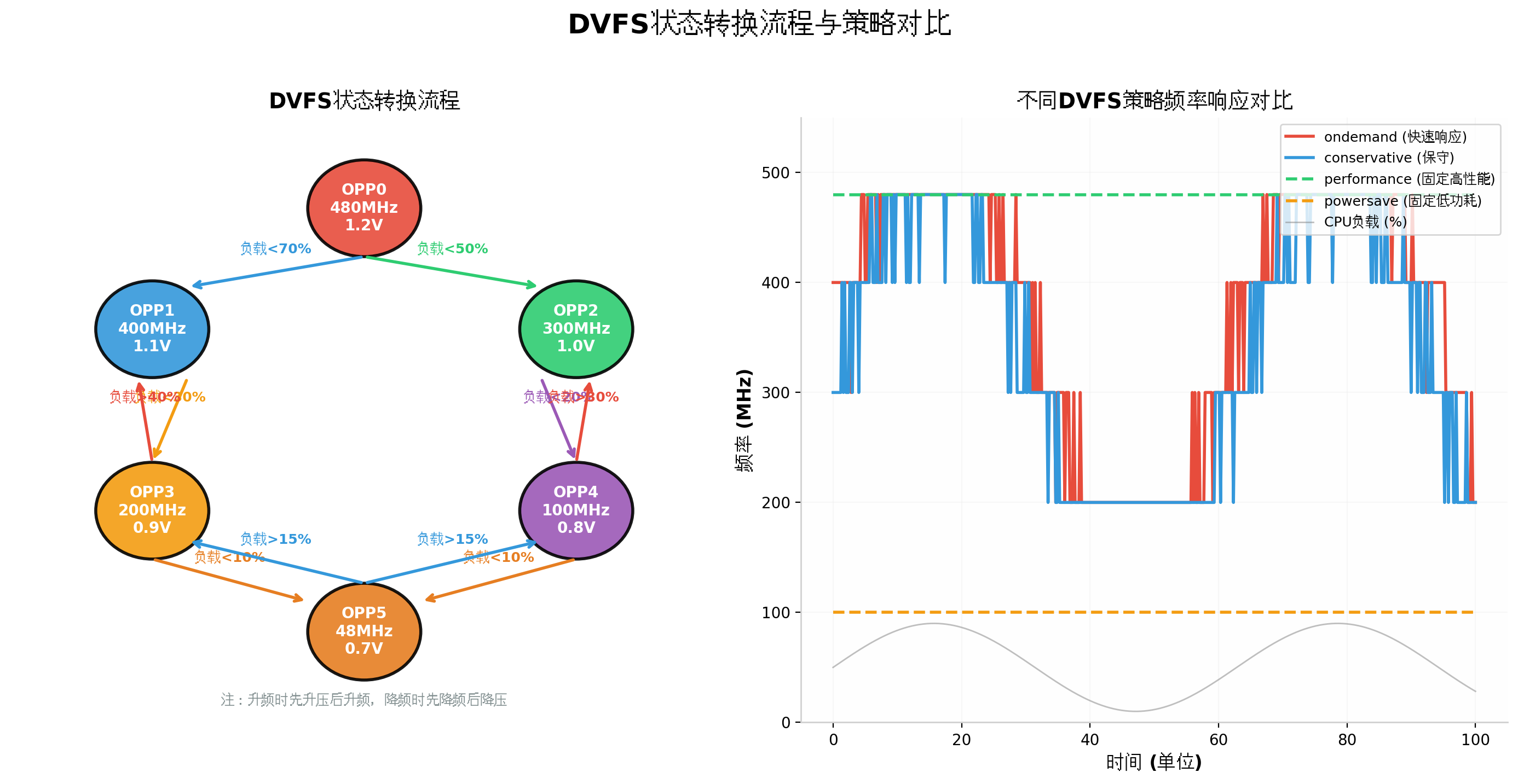
ondemand策略(快速响应):
- 负载超过阈值立即升频到最高
- 负载低于阈值逐步降频
- 适合:交互式应用,需要快速响应
conservative策略(保守稳定):
- 负载超过阈值逐步升频
- 负载低于阈值逐步降频
- 适合:后台任务,避免频繁切换
performance策略(固定高性能):
- 始终运行在最高频率
- 适合:实时性要求极高的场景
powersave策略(固定低功耗):
- 始终运行在最低频率
- 适合:始终轻负载的后台任务
4.2 负载计算算法
c
/* CPU负载计算:基于空闲时间统计 */
typedef struct {
uint64_t idle_time; /* 空闲时间 (μs) */
uint64_t busy_time; /* 运行时间 (μs) */
uint64_t last_update; /* 上次更新时间 */
uint32_t load_percent; /* 负载百分比 */
} cpu_load_t;
static cpu_load_t cpu_load = {0};
/* 在系统滴答中断中调用 */
void dvfs_update_load(void) {
uint64_t now = get_microseconds();
uint64_t period = now - cpu_load.last_update;
if (period > 0) {
/* 计算负载百分比 */
cpu_load.load_percent = (cpu_load.busy_time * 100) / period;
/* 限制范围 */
if (cpu_load.load_percent > 100) {
cpu_load.load_percent = 100;
}
/* 重置计数器 */
cpu_load.busy_time = 0;
cpu_load.idle_time = 0;
cpu_load.last_update = now;
}
}
/* 在任务切换时记录 */
void dvfs_record_busy_time(uint64_t duration) {
cpu_load.busy_time += duration;
}
/* 获取平滑负载(移动平均) */
uint32_t dvfs_get_smooth_load(void) {
static uint32_t history[4] = {0};
static int idx = 0;
/* 更新历史记录 */
history[idx] = cpu_load.load_percent;
idx = (idx + 1) % 4;
/* 计算加权平均 */
uint32_t avg = (history[0] * 1 + history[1] * 2 +
history[2] * 3 + history[3] * 4) / 10;
return avg;
}4.3 ondemand策略实现
c
/* ondemand策略参数 */
#define ONDEMAND_UP_THRESHOLD 70 /* 升频阈值 */
#define ONDEMAND_DOWN_THRESHOLD 30 /* 降频阈值 */
#define ONDEMAND_SAMPLING_RATE 100 /* 采样周期 (ms) */
/* ondemand策略主循环 */
void dvfs_ondemand_policy(void) {
uint32_t load = dvfs_get_smooth_load();
int target_opp = current_opp_idx;
if (load > ONDEMAND_UP_THRESHOLD) {
/* 负载高,立即升频到最高 */
target_opp = 0; /* OPP0 */
printf("[DVFS] Load %d%% > %d%%, scale up to OPP%d\\n",
load, ONDEMAND_UP_THRESHOLD, target_opp);
}
else if (load < ONDEMAND_DOWN_THRESHOLD) {
/* 负载低,逐步降频 */
if (current_opp_idx < OPP_COUNT - 1) {
target_opp = current_opp_idx + 1;
printf("[DVFS] Load %d%% < %d%%, scale down to OPP%d\\n",
load, ONDEMAND_DOWN_THRESHOLD, target_opp);
}
}
/* 执行频率切换 */
if (target_opp != current_opp_idx) {
dvfs_switch_opp(target_opp);
}
}
/* 在定时器中断中周期性调用 */
void TIM_DVFSTick_Handler(void) {
static uint32_t tick_count = 0;
tick_count++;
if (tick_count >= ONDEMAND_SAMPLING_RATE) {
tick_count = 0;
/* 提交DVFS任务到工作队列 */
osal_work_submit(dvfs_ondemand_policy);
}
}五、安全切换时序
5.1 核心原则:先升压后升频,先降频后降压
DVFS切换必须遵循严格的安全顺序,否则可能导致芯片工作不稳定:
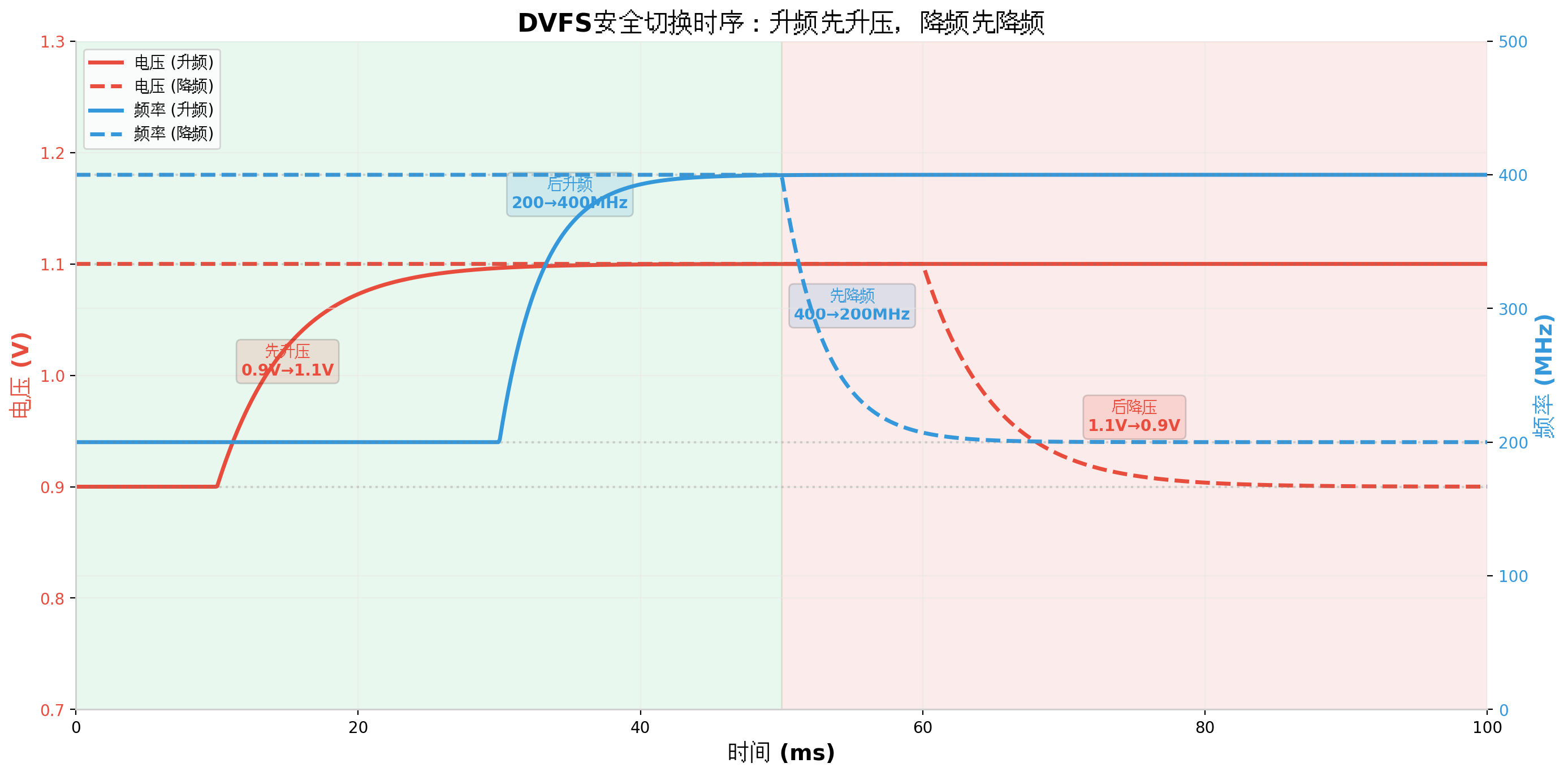
升频过程(OPP3→OPP1:200MHz/0.9V → 400MHz/1.1V):
- 先升压:将电压从0.9V提升至1.1V,等待电压稳定(约10-20ms)
- 后升频:电压稳定后,将PLL配置为400MHz,等待时钟锁定(约5-10ms)
降频过程(OPP1→OPP3:400MHz/1.1V → 200MHz/0.9V):
- 先降频:将PLL配置为200MHz,等待时钟稳定
- 后降压:频率稳定后,将电压从1.1V降低至0.9V
为什么必须这样?
- 升频时先升压:如果先升频,CPU在1.1V需求下运行在0.9V,可能导致时序违例、计算错误
- 降频时先降频:如果先降压,CPU在0.9V下仍尝试运行400MHz,必然导致不稳定
5.2 安全切换代码实现
c
/* DVFS安全切换函数 */
int dvfs_switch_opp(int target_opp_idx) {
if (target_opp_idx < 0 || target_opp_idx >= OPP_COUNT) {
return -EINVAL;
}
const opp_entry_t *current = &stm32h7_opp_table[current_opp_idx];
const opp_entry_t *target = &stm32h7_opp_table[target_opp_idx];
/* 获取调度锁,防止切换过程中任务调度 */
vTaskSuspendAll();
/* 禁用中断 */
uint32_t primask = __get_PRIMASK();
__disable_irq();
if (target->freq_khz > current->freq_khz) {
/* ========== 升频:先升压,后升频 ========== */
printf("[DVFS] Up: %luMHz/%luV -> %luMHz/%luV\\n",
current->freq_khz/1000, current->voltage_uv/1000000,
target->freq_khz/1000, target->voltage_uv/1000000);
/* Step 1: 提升电压 */
pmic_set_voltage(target->voltage_uv);
/* Step 2: 等待电压稳定 */
dvfs_wait_voltage_stable(target->voltage_uv);
/* Step 3: 配置Flash等待周期 */
if (target->freq_khz > 300000) {
__HAL_FLASH_SET_LATENCY(FLASH_LATENCY_3);
} else if (target->freq_khz > 200000) {
__HAL_FLASH_SET_LATENCY(FLASH_LATENCY_2);
} else {
__HAL_FLASH_SET_LATENCY(FLASH_LATENCY_1);
}
/* Step 4: 切换PLL频率 */
rcc_config_pll(target->freq_khz);
/* Step 5: 等待PLL锁定 */
while (!__HAL_RCC_GET_FLAG(RCC_FLAG_PLLRDY));
} else {
/* ========== 降频:先降频,后降压 ========== */
printf("[DVFS] Down: %luMHz/%luV -> %luMHz/%luV\\n",
current->freq_khz/1000, current->voltage_uv/1000000,
target->freq_khz/1000, target->voltage_uv/1000000);
/* Step 1: 切换PLL频率 */
rcc_config_pll(target->freq_khz);
/* Step 2: 等待PLL锁定 */
while (!__HAL_RCC_GET_FLAG(RCC_FLAG_PLLRDY));
/* Step 3: 配置Flash等待周期 */
if (target->freq_khz > 300000) {
__HAL_FLASH_SET_LATENCY(FLASH_LATENCY_3);
} else if (target->freq_khz > 200000) {
__HAL_FLASH_SET_LATENCY(FLASH_LATENCY_2);
} else {
__HAL_FLASH_SET_LATENCY(FLASH_LATENCY_1);
}
/* Step 4: 降低电压 */
pmic_set_voltage(target->voltage_uv);
/* Step 5: 等待电压稳定 */
dvfs_wait_voltage_stable(target->voltage_uv);
}
/* 更新当前OPP */
current_opp_idx = target_opp_idx;
/* 恢复中断 */
__set_PRIMASK(primask);
/* 恢复调度 */
xTaskResumeAll();
printf("[DVFS] Switch complete, now at OPP%d: %luMHz/%luV\\n",
current_opp_idx, target->freq_khz/1000, target->voltage_uv/1000000);
return 0;
}
/* 等待电压稳定 */
void dvfs_wait_voltage_stable(uint32_t target_voltage_uv) {
uint32_t timeout = 10000; /* 10ms超时 */
uint32_t current_voltage;
do {
current_voltage = pmic_read_voltage();
if (abs((int)current_voltage - (int)target_voltage_uv) < 10000) { /* 10mV容差 */
break;
}
delay_us(10);
timeout--;
} while (timeout > 0);
if (timeout == 0) {
printf("[DVFS] ERROR: Voltage stable timeout!\\n");
/* 触发故障处理 */
system_fault_handler();
}
}5.3 逐级调节策略
为避免大幅跳变导致的稳定性问题,推荐逐级调节:
c
/* 逐级调节:每次只切换一级OPP */
int dvfs_switch_opp_gradual(int target_opp_idx) {
if (target_opp_idx > current_opp_idx) {
/* 升频:逐级上升 */
for (int i = current_opp_idx + 1; i <= target_opp_idx; i++) {
dvfs_switch_opp(i);
delay_ms(5); /* 每级间隔5ms */
}
} else if (target_opp_idx < current_opp_idx) {
/* 降频:逐级下降 */
for (int i = current_opp_idx - 1; i >= target_opp_idx; i--) {
dvfs_switch_opp(i);
delay_ms(5); /* 每级间隔5ms */
}
}
return 0;
}六、温度补偿与热管理
6.1 温度对DVFS的影响
芯片温度直接影响最大安全工作频率:
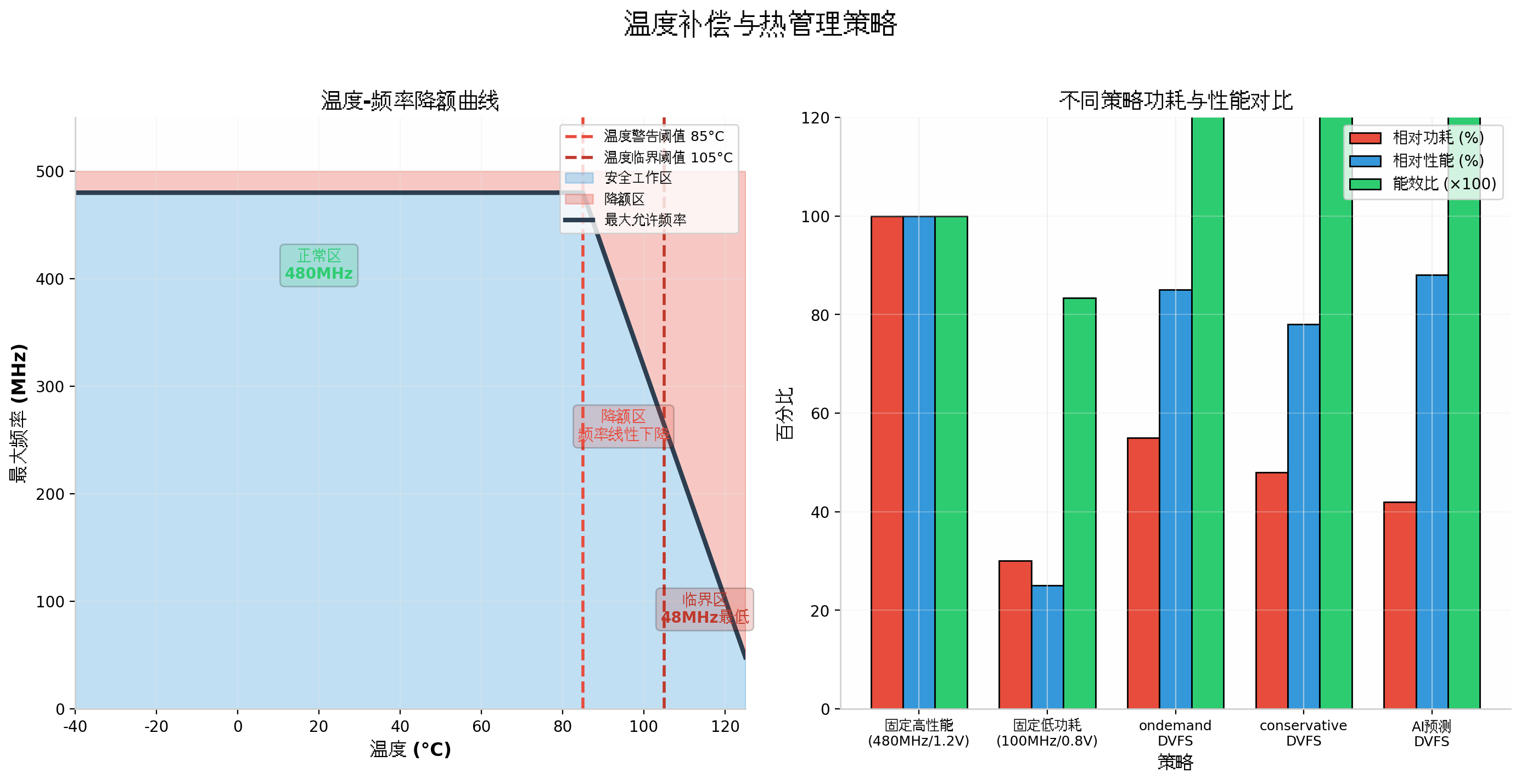
温度-频率降额曲线:
- 正常区(-40°C~85°C):可运行在最高频率480MHz
- 降额区(85°C~105°C):频率线性下降,每升高1°C降低约20MHz
- 临界区(105°C~125°C):限制到最低频率48MHz,触发过热保护
6.2 温度补偿实现
c
/* 温度传感器配置 */
#define TEMP_SENSOR_ADC_CHANNEL ADC_CHANNEL_TEMPSENSOR
/* 读取芯片结温 */
int32_t dvfs_read_temperature(void) {
HAL_ADC_Start(&hadc1);
HAL_ADC_PollForConversion(&hadc1, 100);
uint32_t adc_value = HAL_ADC_GetValue(&hadc1);
/* STM32温度计算公式 */
/* T = (V25 - Vsense) / Avg_Slope + 25 */
/* V25 = 0.76V, Avg_Slope = 2.5mV/°C */
int32_t temperature = ((int32_t)adc_value * 3300 / 4096 - 760) * 10 / 25 + 25;
return temperature;
}
/* 温度补偿DVFS */
void dvfs_thermal_management(void) {
int32_t temp = dvfs_read_temperature();
int max_opp = 0; /* 默认最高 */
if (temp > 105) {
/* 临界温度:强制最低频率 */
max_opp = OPP_COUNT - 1; /* OPP5: 48MHz */
printf("[THERMAL] CRITICAL: Temp %d°C, force lowest freq!\\n", temp);
system_trigger_thermal_alarm();
}
else if (temp > 85) {
/* 降额区:线性计算最大允许OPP */
/* 85°C->OPP0, 105°C->OPP5 */
int range = 105 - 85;
int offset = temp - 85;
max_opp = (offset * (OPP_COUNT - 1)) / range;
printf("[THERMAL] Derating: Temp %d°C, max OPP%d\\n", temp, max_opp);
}
/* 如果当前OPP超过温度限制,强制降频 */
if (current_opp_idx < max_opp) {
printf("[THERMAL] Current OPP%d exceeds thermal limit, scaling down...\\n",
current_opp_idx);
dvfs_switch_opp_gradual(max_opp);
}
}七、嵌入式MCU DVFS实现
7.1 系统架构
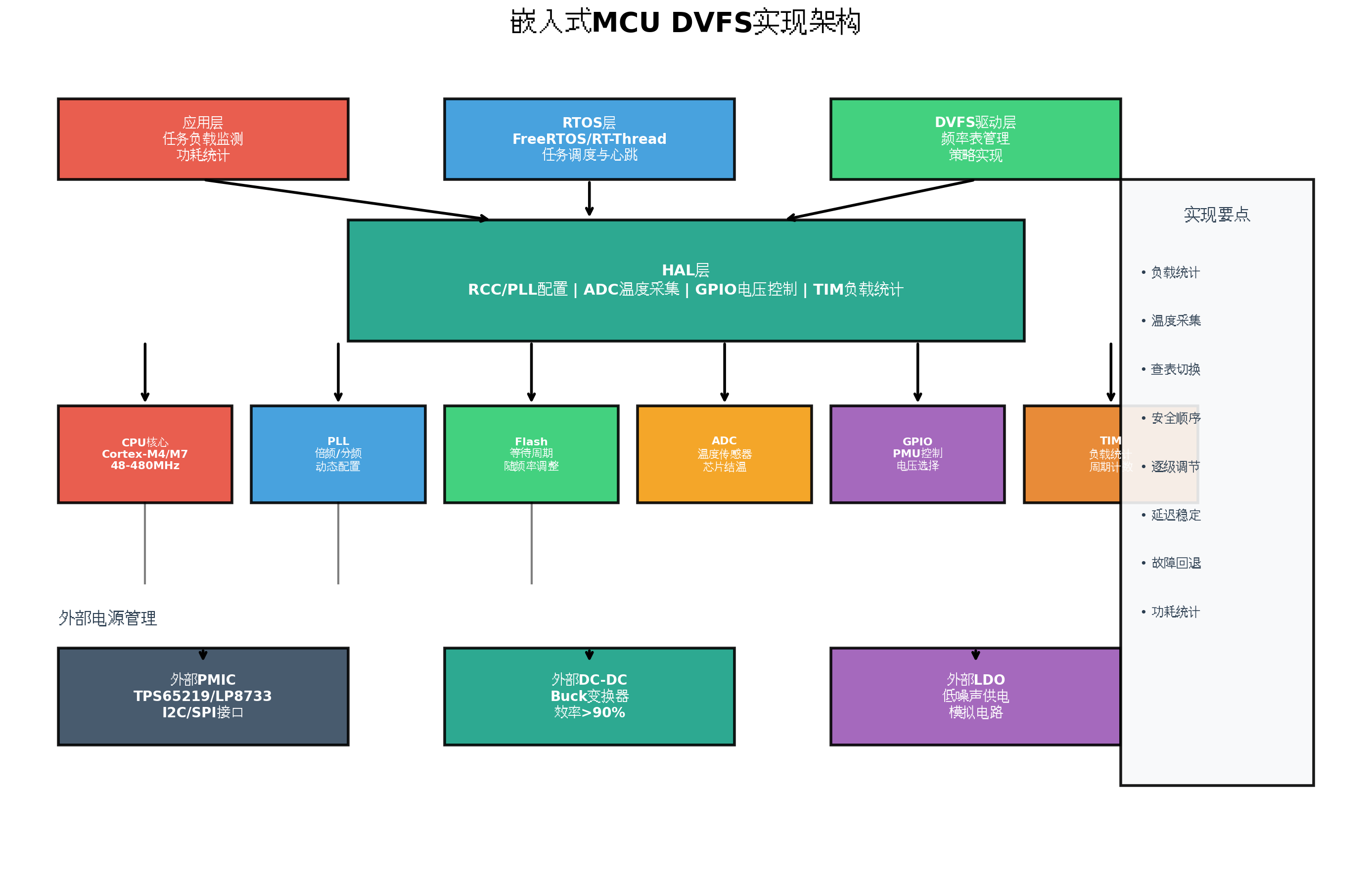
关键组件:
- RCC/PLL配置:动态调整系统时钟
- ADC温度采集:读取芯片结温
- GPIO电压控制:控制外部PMIC
- TIM负载统计:统计CPU空闲/运行时间
7.2 STM32 DVFS完整驱动
c
/* STM32H7 DVFS驱动完整实现 */
#include "stm32h7xx_hal.h"
#include "FreeRTOS.h"
#include "task.h"
/* 外部PMIC I2C地址 */
#define PMIC_I2C_ADDR 0x60
/* DVFS任务句柄 */
TaskHandle_t dvfs_task_handle = NULL;
/* DVFS初始化 */
void dvfs_init(void) {
/* 初始化OPP表 */
/* 已在全局定义 */
/* 配置定时器:每100ms采样一次负载 */
HAL_TIM_Base_Start_IT(&htim2);
/* 配置ADC温度传感器 */
HAL_ADCEx_Calibration_Start(&hadc1, ADC_CALIB_OFFSET, ADC_SINGLE_ENDED);
/* 创建DVFS任务 */
xTaskCreate(dvfs_task, "DVFS", 256, NULL, 3, &dvfs_task_handle);
printf("[DVFS] Initialized, current OPP: %d\\n", current_opp_idx);
}
/* DVFS主任务 */
void dvfs_task(void *pvParameters) {
TickType_t last_wake = xTaskGetTickCount();
while (1) {
/* 读取温度 */
int32_t temp = dvfs_read_temperature();
/* 热管理 */
dvfs_thermal_management();
/* 执行策略 */
dvfs_ondemand_policy();
/* 功耗统计 */
dvfs_power_statistics();
/* 100ms周期 */
vTaskDelayUntil(&last_wake, pdMS_TO_TICKS(100));
}
}
/* 定时器中断:负载统计 */
void TIM2_IRQHandler(void) {
if (__HAL_TIM_GET_FLAG(&htim2, TIM_FLAG_UPDATE)) {
__HAL_TIM_CLEAR_FLAG(&htim2, TIM_FLAG_UPDATE);
/* 在滴答中断中统计CPU空闲时间 */
/* 通过比较SysTick计数值判断 */
static uint32_t last_systick = 0;
uint32_t current_systick = SysTick->VAL;
if (current_systick > last_systick) {
/* SysTick递减计数,值增大说明发生了溢出(即CPU在运行) */
cpu_load.busy_time += 1; /* 简化统计 */
}
last_systick = current_systick;
}
}
/* 功耗统计 */
void dvfs_power_statistics(void) {
static uint64_t total_energy = 0; /* μJ */
const opp_entry_t *opp = &stm32h7_opp_table[current_opp_idx];
/* 估算功耗:P = V * I */
/* 简化模型:假设电流与频率成正比 */
uint32_t current_ma = opp->power_mw * 1000 / opp->voltage_uv;
uint32_t power_uw = opp->voltage_uv * current_ma / 1000;
/* 累积能量 */
total_energy += power_uw * 100; /* 100ms周期 */
/* 打印统计 */
static int print_count = 0;
if (++print_count >= 10) { /* 每秒打印一次 */
print_count = 0;
printf("[DVFS] OPP%d, %luMHz/%luV, P=%lumW, E=%lluμJ\\n",
current_opp_idx, opp->freq_khz/1000, opp->voltage_uv/1000000,
opp->power_mw, total_energy);
}
}八、鸿蒙OS DVFS集成
8.1 鸿蒙OS功耗管理框架
鸿蒙OS(HarmonyOS)提供了PowerHAL(Hardware Abstraction Layer)框架,支持DVFS集成:
c
/* 鸿蒙OS PowerHAL DVFS接口 */
#include "power_mgr_client.h"
#include "osal_work.h"
using namespace OHOS::PowerMgr;
/* 鸿蒙DVFS策略 */
class HarmonyDVFS {
public:
/* 初始化 */
static void Init() {
/* 注册功耗管理回调 */
PowerMgrClient::GetInstance().RegisterPowerStateCallback(
std::bind(&HarmonyDVFS::OnPowerStateChanged, this, std::placeholders::_1));
/* 创建DVFS工作队列 */
OsalWorkQueueInit(&dvfs_wq, "dvfs_wq", 1, 0);
}
/* 设置低功耗模式 */
static void EnterLowPowerMode() {
/* 设置设备进入低功耗模式 */
PowerMgrClient::GetInstance().SetMode(POWER_MODE_LOW_POWER);
/* 降频到最低OPP */
dvfs_switch_opp(OPP_COUNT - 1);
}
/* 恢复高性能模式 */
static void EnterHighPerfMode() {
/* 设置设备进入高性能模式 */
PowerMgrClient::GetInstance().SetMode(POWER_MODE_NORMAL);
/* 根据负载选择OPP */
dvfs_ondemand_policy();
}
/* 分布式场景优化 */
static void OnDistributedEvent(uint32_t event_type) {
switch (event_type) {
case DISTRIBUTED_EVENT_START:
/* 分布式通信开始,预升频 */
dvfs_switch_opp_gradual(0); /* 最高性能 */
break;
\n case DISTRIBUTED_EVENT_END:
/* 分布式通信结束,恢复节能 */
dvfs_ondemand_policy();
break;
}
}
private:
static void OnPowerStateChanged(PowerState state) {
switch (state) {
case POWER_STATE_SUSPEND:
/* 系统挂起前,保存DVFS状态 */
dvfs_save_state();
break;
case POWER_STATE_RESUME:
/* 系统恢复后,恢复DVFS状态 */
dvfs_restore_state();
break;
}
}
};8.2 不同场景DVFS策略
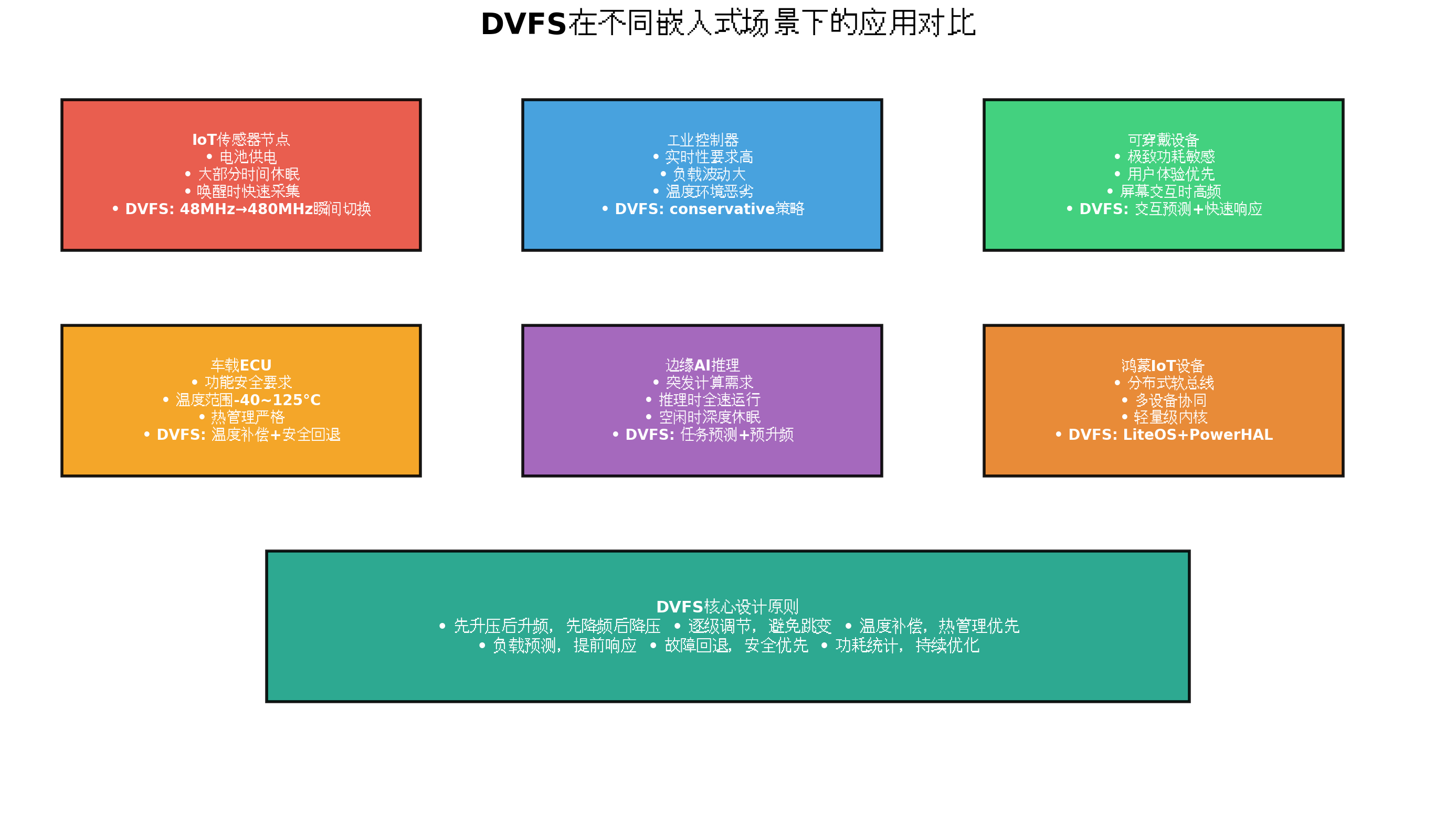
| 场景 | 特点 | DVFS策略 | 关键参数 |
|---|---|---|---|
| IoT传感器 | 电池供电、间歇工作 | 休眠唤醒+快速切换 | 唤醒延迟<1ms |
| 工业控制 | 实时性、温度恶劣 | conservative+温度补偿 | 降额曲线-40~125°C |
| 可穿戴 | 极致功耗、用户体验 | 交互预测+快速响应 | 触摸升频<5ms |
| 车载ECU | 功能安全、热管理 | 温度补偿+安全回退 | ASIL-B/D |
| 边缘AI | 突发计算、推理加速 | 任务预测+预升频 | 预升频窗口10ms |
| 鸿蒙IoT | 分布式、多设备协同 | LiteOS+PowerHAL | 软总线触发 |
九、调试与验证
9.1 DVFS调试要点
c
/* DVFS调试接口 */
void dvfs_debug_info(void) {
printf("===== DVFS Debug Info =====\\n");
printf("Current OPP: %d\\n", current_opp_idx);
printf("Current Freq: %lu MHz\\n",
stm32h7_opp_table[current_opp_idx].freq_khz / 1000);
printf("Current Voltage: %lu mV\\n",
stm32h7_opp_table[current_opp_idx].voltage_uv / 1000);
printf("Current Load: %d%%\\n", cpu_load.load_percent);
printf("Temperature: %d°C\\n", dvfs_read_temperature());
printf("Total Energy: %llu μJ\\n", total_energy);
printf("========================\\n");
}
/* 通过串口命令触发DVFS */
void dvfs_cli_command(char *cmd) {
if (strcmp(cmd, \"dvfs info\") == 0) {
dvfs_debug_info();
} else if (strncmp(cmd, \"dvfs set \", 9) == 0) {
int opp = atoi(cmd + 9);
dvfs_switch_opp_gradual(opp);
} else if (strcmp(cmd, \"dvfs stress\") == 0) {
/* 压力测试:快速切换所有OPP */
for (int i = 0; i < OPP_COUNT; i++) {
dvfs_switch_opp(i);
delay_ms(1000);
dvfs_debug_info();
}
}
}9.2 验证测试
| 测试项 | 方法 | 通过标准 |
|---|---|---|
| 电压稳定性 | 示波器测量电源纹波 | 纹波<50mV |
| 频率精度 | 逻辑分析仪测量时钟 | 误差<1% |
| 切换时间 | 示波器触发测量 | 升频<30ms,降频<50ms |
| 温度降额 | 温箱测试 | 85°C以上频率线性下降 |
| 稳定性测试 | 72小时压力测试 | 无死机、无数据错误 |
| 功耗验证 | 精密电源测量 | 与理论值偏差<10% |
十、总结与展望
本文系统阐述了DVFS技术在嵌入式系统中的实现方法:
- 电压域划分:独立调节、电平转换、隔离设计,实现精细化的电源管理
- OPP表设计:电压-频率对应关系、功耗模型、测试验证,确保每个工作点稳定可靠
- 策略算法:ondemand/conservative/performance/powersave,适应不同应用场景
- 安全切换:先升压后升频、先降频后降压、逐级调节,保障系统稳定性
- 温度补偿:热管理、降额曲线、安全回退,应对极端温度环境
- 鸿蒙集成:PowerHAL框架、分布式场景优化、轻量级内核适配
未来发展趋势:
- AI预测DVFS:利用机器学习预测负载趋势,提前调整频率,减少响应延迟
- 细粒度DVFS:从CPU级扩展到IP核级、功能单元级,实现更精细的功耗控制
- 自适应电压调节(AVS):基于芯片工艺偏差和老化状态,动态调整电压裕量
- 鸿蒙分布式DVFS:多设备协同调度,根据任务分配动态调整各节点功耗
转载自:https://blog.csdn.net/u014727709/article/details/162559840
欢迎 👍点赞✍评论⭐收藏,欢迎指正