1.开发背景
基于以上的章节,了解了 FreeRTOS 多线程间的信号量、队列的使用,已经满足了日常使用场景。其中信号量可以实现线程同步,对标的是裸机的 Flag 标识,但是在裸机中经常使用的不止一个标识,如果用二值信号量去实现无疑是增加了系统内存开销,申请多个信号量,实现本质是队列,消耗比较大并且带有迟滞性,所以 FreeRTOS 针对这种情况设计了事件组。
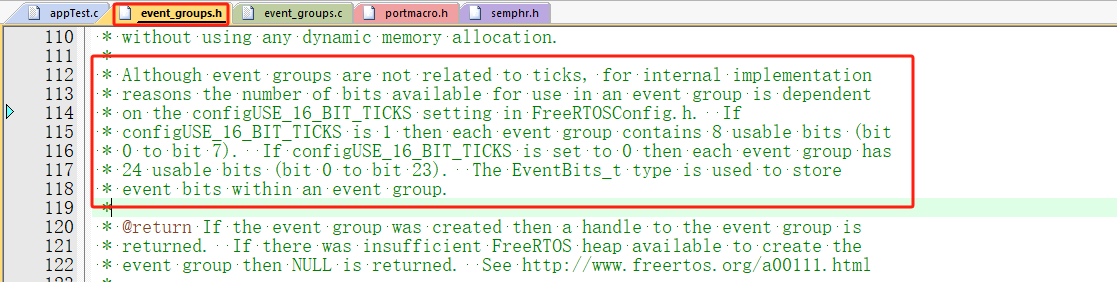
事件组是按 bit 操作的,每一个位都可以触发事件,需要注意的是时钟的配置会影响可用的位配置,源码解释如果设置 configUSE_16_BIT_TICKS 系统时钟 16 位,只能用 0~7bit,否则可以使用 0~23 bit。
2.开发需求
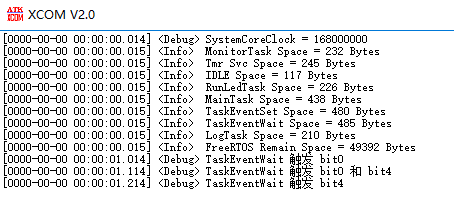
设计实验1:位事件设置和等待
1)创建 2 个线程,设置位事件线程和等待位事件线程
2)设置位事件线程分别设置 bit0、bit0 和 bit4、bit4
3)等待位事件线程等待信号并输出对应日志
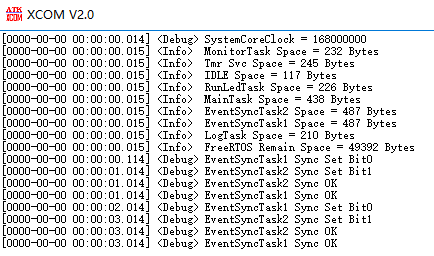
设计试验2:位事件同步
1)创建 2 个线程,同步线程1 控制 bit0, 同步线程2 控制 bit1
2)同步线程1 每 1s 同步一次,同步线程 2 每 2s 同步一次
3)观察线程同步的实时性。
3.开发环境
window10 + MDK + STM32F429 + FreeRTOS10.3.1
4.实现步骤
4.1 位事件设置和等待
4.1.1 实现编码
重点关注 xEventGroupWaitBits 的参数
uxBitsToWaitFor: 等待关注的事件(bit)
xClearOnExit: 是否清空,一般设置为是,清空不会反复触发
xWaitForAllBits: 是否等待所有位都满足条件才触发,看需求
cpp
#include "appTest.h"
#include <stdio.h>
#include <string.h>
#include <stdlib.h>
#include "mspDwt.h"
#include "mspGpio.h"
#include "mspExti.h"
#include "FreeRTOS.h"
#include "task.h"
#include "queue.h"
#include "stream_buffer.h"
#include "event_groups.h"
#include "appLog.h"
typedef struct
{
/* 事件组 */
EventGroupHandle_t event;
/* 任务线程 */
TaskHandle_t taskEventWait; // 接收线程
TaskHandle_t taskEventSet; // 发送线程
}Ctrl_t;
/* 文件指针 */
static Ctrl_t s_ctrl = {0};
static Ctrl_t *p = &s_ctrl;
static void TaskEventSet(void *pvParameters);
static void TaskEventWait(void *pvParameters);
#define BIT_0 ( 1 << 0 )
#define BIT_1 ( 1 << 1 )
#define BIT_2 ( 1 << 2 )
#define BIT_3 ( 1 << 3 )
#define BIT_4 ( 1 << 4 )
#define ALL_SYNC_BITS ( BIT_0 | BIT_4 )
/* 接收线程 */
static void TaskEventWait(void *pvParameters)
{
vTaskDelay(100);
for ( ; ; )
{
EventBits_t uxBits = xEventGroupWaitBits(p->event, ALL_SYNC_BITS, pdTRUE, pdFALSE, portMAX_DELAY);
switch (uxBits)
{
case ALL_SYNC_BITS:
Log_Debug("%s 触发 bit0 和 bit4\r\n", __func__);
break;
case BIT_0:
Log_Debug("%s 触发 bit0\r\n", __func__);
break;
case BIT_4:
Log_Debug("%s 触发 bit4\r\n", __func__);
break;
default:
break;
}
vTaskDelay(100);
}
}
/* 发送线程 */
static void TaskEventSet(void *pvParameters)
{
vTaskDelay(1000);
EventBits_t uxBits = 0;
/* 设置 bit0 */
uxBits &= 0x00000000;
uxBits |= BIT_0;
xEventGroupSetBits(p->event, uxBits);
vTaskDelay(100);
/* 设置 bit0 和 bit4 */
uxBits &= 0x00000000;
uxBits |= BIT_0 | BIT_4;
xEventGroupSetBits(p->event, uxBits);
vTaskDelay(100);
/* 设置 bit4 */
uxBits &= 0x00000000;
uxBits |= BIT_4;
xEventGroupSetBits(p->event, uxBits);
vTaskDelay(100);
for ( ; ; )
{
vTaskDelay(1000);
}
}
/* 测试初始化 */
void aTest_Init(void)
{
/* 创建事件组 */
p->event = xEventGroupCreate();
/* 创建动态任务 */
xTaskCreate(TaskEventWait, "TaskEventWait", 500, NULL, 5, &p->taskEventWait);
xTaskCreate(TaskEventSet, "TaskEventSet", 500, NULL, 5, &p->taskEventSet);
}
/* Key2 PC13 Key0 PH3 Key1 PH2 */
void Exti13_TriggerInterrupt(void)
{
mspExti_Close(13);
if (mspGpio_GetInput("PC13") == 0)
{
}
}4.1.2 结果显示
4.2 位事件同步
位事件同步主要实现多线程同步执行,相互等待,调用 xEventGroupSync,会先设置位在阻塞等待位,相当与 xEventGroupSetBits() + xEventGroupWaitBits();
4.2.1 实现编码
cpp
#include "appTest.h"
#include <stdio.h>
#include <string.h>
#include <stdlib.h>
#include "mspDwt.h"
#include "mspGpio.h"
#include "mspExti.h"
#include "FreeRTOS.h"
#include "task.h"
#include "queue.h"
#include "stream_buffer.h"
#include "event_groups.h"
#include "appLog.h"
typedef struct
{
/* 事件组 */
EventGroupHandle_t event;
/* 任务线程 */
TaskHandle_t taskEventSync1; // 线程
TaskHandle_t taskEventSync2; // 线程
}Ctrl_t;
/* 文件指针 */
static Ctrl_t s_ctrl = {0};
static Ctrl_t *p = &s_ctrl;
static void EventSyncTask1(void *pvParameters);
static void EventSyncTask2(void *pvParameters);
#define BIT_0 ( 1 << 0 )
#define BIT_1 ( 1 << 1 )
#define BIT_2 ( 1 << 2 )
#define BIT_3 ( 1 << 3 )
#define BIT_4 ( 1 << 4 )
#define ALL_SYNC_BITS (BIT_0 | BIT_1)
/* 线程 */
static void EventSyncTask1(void *pvParameters)
{
vTaskDelay(100);
for ( ; ; )
{
/* 设置 bit0 */
Log_Debug("%s Sync Set Bit0\r\n", __func__);
EventBits_t uxBits = xEventGroupSync(p->event, BIT_0, ALL_SYNC_BITS, portMAX_DELAY);
Log_Debug("%s Sync OK\r\n", __func__);
vTaskDelay(1000);
}
}
/* 线程 */
static void EventSyncTask2(void *pvParameters)
{
vTaskDelay(1000);
for ( ; ; )
{
/* 设置 bit1 */
Log_Debug("%s Sync Set Bit1\r\n", __func__);
EventBits_t uxBits = xEventGroupSync(p->event, BIT_1, ALL_SYNC_BITS, portMAX_DELAY);
Log_Debug("%s Sync OK\r\n", __func__);
vTaskDelay(2000);
}
}
/* 测试初始化 */
void aTest_Init(void)
{
/* 创建事件组 */
p->event = xEventGroupCreate();
/* 创建动态任务 */
xTaskCreate(EventSyncTask1, "EventSyncTask1", 500, NULL, 5, &p->taskEventSync1);
xTaskCreate(EventSyncTask2, "EventSyncTask2", 500, NULL, 5, &p->taskEventSync2);
}
/* Key2 PC13 Key0 PH3 Key1 PH2 */
void Exti13_TriggerInterrupt(void)
{
mspExti_Close(13);
if (mspGpio_GetInput("PC13") == 0)
{
}
}4.2.2 结果显示