进程和线程的区别
- 本质区别 :
- 进程是资源调度以及分配的基本单位。
- 线程是
CPU调度的基本单位。
- 所属关系:一个线程属于一个进程,一个进程可以拥有多个线程。
- 地址空间 :
- 进程有独立的虚拟地址空间。
- 线程没有独立的虚拟地址空间:线程有调用栈、程序计数器(
PC)、本地存储(LS)等少量独立空间。
- 内存 :
- 系统会为每个进程分配不同的内存空间。
- 系统不会为线程分配内存 ,线程所使用的资源来自其所属的进程。
- 并发性 :
- 进程的并发性较低。
- 线程的并发性较高。
- 对于单个
CPU,操作系统会把CPU的运行时间划分为多个时间段,再将时间段分配给各个线程执行。 - 切换效率:
- 进程切换效率低(因为所属的资源多) ,线程切换效率高。
- 都会涉及到上下文切换。
- 健壮性 :
- 一个进程崩溃后,不会影响其他进程,进程的健壮性高。
- 一个线程崩溃后,导致整个进程崩溃,线程的健壮性低。
- 进程隔离性强一些。
进程与线程的上下文切换过程
- 进程由哪几个部分构成:
task_struct。- 进程的虚拟地址空间。
- 上下文由哪几个部分构成:
- 用户级上下文 → 虚拟地址空间:
- 代码。
- 数据。
- 堆栈等。
- 系统级上下文 →
task_struct:- 进程标识信息。
- 进程现场信息。
- 进程控制信息。
- 系统内核栈。
- 寄存器上下文(硬件上下文)。
CPU各寄存器的内容。- 进程的现场信息 ,存储在系统内核栈(中断栈)。
- 用户级上下文 → 虚拟地址空间:
- 何时发生切换:
- 主动:系统调用,产生软中断。
- 被动:时间片到了,时间中断。
- 由中断来完成切换。
- 进程切换过程:
- 保存当前进程的硬件上下文。
- 修改当前进程的状态(存储在 PCB 中) ,状态由运行态改为就绪态或阻塞态 ,加入相关队列(就绪队列或阻塞队列)。
- 调度另外一个进程。
- 修改被调度进程的状态,将其状态改为运行态。
- 把当前进程的存储管理数据改为被调度进程的存储管理信息(页表、
cacheTLB) → 用户级上下文切换。 - 恢复被调度进程的硬件上下文,让
PC指向被调度的进程代码。
进程调度策略有哪几种
- 调度对象:
- 线程和进程相对于操作系统而言都是任务(
task_struct)。 - 线程也被称之为共享用户虚拟地址空间的进程。
- 包含多个线程的进程被称之为线程组。
- 只有一个线程的进程被称之为进程。
- 没有用户虚拟地址空间的进程被称之为内核线程(内核中的所有线程共享内核虚拟地址空间)。
- 线程和进程相对于操作系统而言都是任务(
- 进程调度用于决定由谁(哪个或哪几个)获得处理器的执行权。
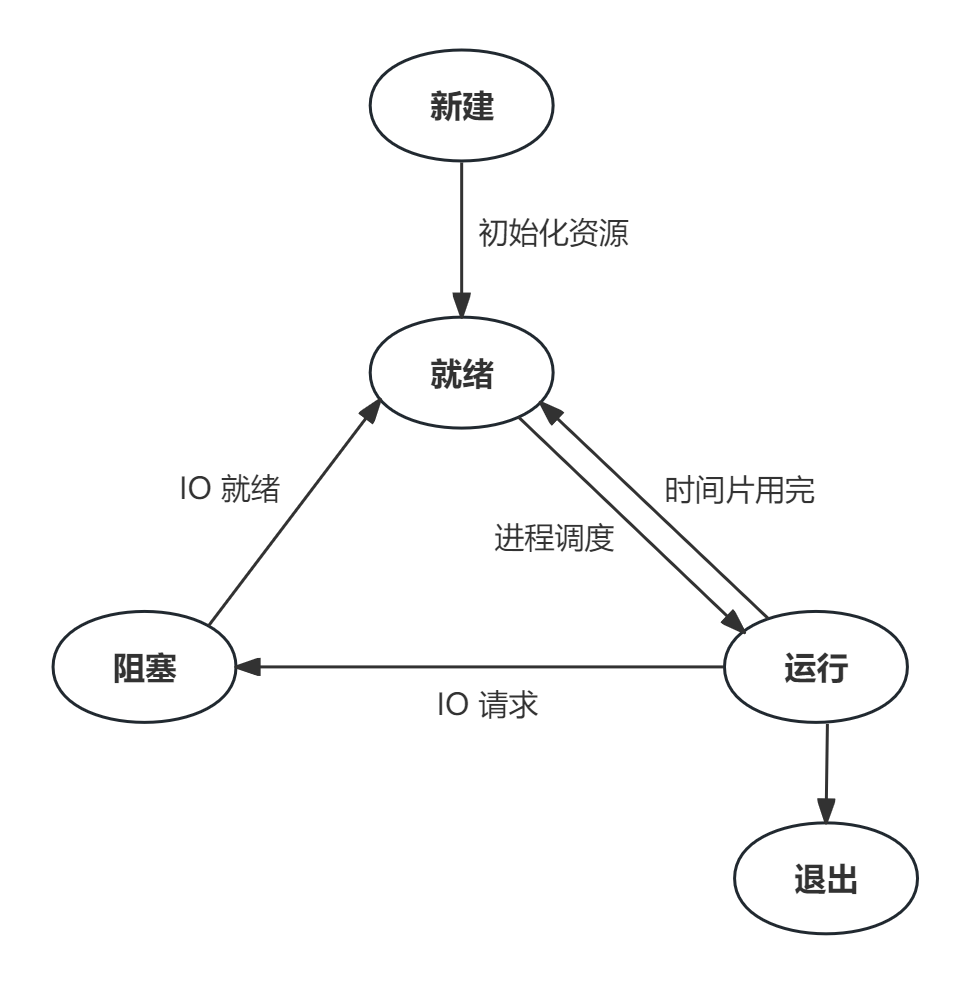
- 进程的状态:
- 从新建到就绪:当进程创建完毕,初始化所有必要资源后,它被放入就绪队列。
- 从就绪到运行:调度程序从就绪队列中选择一个进程并分配
CPU时间片。 - 从运行到就绪:当进程的时间片用完但进程尚未完成时,它会被放回就绪队列。
- 从运行到阻塞:如果进程请求了当前不可用的资源或等待操作完成,它将转入阻塞状态。
- 从阻塞到就绪:当进程等待的事件发生或资源变得可用时,它将被移回就绪队列。
- 从运行到退出:进程完成所有操作并自行退出或由于某种原因被操作系统终止。
- 调度时机:
- 主动调度:系统调用等待某个资源。
- 周期调度 :某些进程不主动让出
CPU,内核依靠周期性时钟来抢占调度。 - 唤醒抢占、创建新进程抢占、内核线程抢占。
- 进程调度算法:
- 先来先服务(
FCFS):- 也称为先进先出。
- 从就绪队列中选择存在时间最长的任务执行调度。
- 短作业优先(
SJF):- 从就绪队列中选择估计运行时间最短的任务执行调度。
- 高响应比优先 :
FCFS和SJF的综合。- 综合考虑等待时间和估计运行时间来选择任务执行调度。
- 时间片轮转调度:
- 为任务分配时间片,当执行完时间片后放入就绪队列。
- 优先级调度:
- 从就绪队列中选择优先级最高的若干任务执行调度。
- 优先级用来描述运行的紧迫程度。
- 多级反馈队列调度 :
- 时间片轮转调度和优先级调度的综合。
- 动态调整任务的优先级和时间片大小,从而兼顾多方面的系统目标。
linux(会根据时间片的剩余时间动态调整优先级,更加公平) 和windows(严格按照优先级取出任务分配时间片) 采用。
- 先来先服务(
后台进程有什么特点
- 前台进程:
- 运行在前台的进程。
- 终端是该进程的控制终端。
- 如果终端关闭,则向依赖该终端的所有进程发送一个
SIGHUP信号,然后进程退出。 - 可接收终端输入,并可在终端输出。
- 后台进程:
- 运行在后台的进程,若在终端运行,终端关闭,进程可能退出。
- 不可接收终端输入,可在终端输出。
- 前后台程序切换:
Ctrl + Z:将前台程序切换为后台程序,但是后台程序是挂起状态。jobs:显示所有的后台程序。fg %编号:将后台程序切换为前台程序。bg %编号:让后台程序处于运行状态。& = (Ctrl + Z) + bg %编号。nohup:忽略SIGHUP信号。Ctrl + D:断开终端session,依赖该终端的所有进程都会收到SIGHUP信号。
- 守护进程 :
-
后台进程的延伸,脱离终端的后台进程,不需要考虑
SIGHUP信号。 -
如何成为守护进程:
fork子进程,并让父进程退出 ,从而让子进程被init进程 接管,成为孤儿进程。- 使用
setsid()系统调用建立新的进程会话 ,让孤儿进程成为新建会话的首进程 ,从而脱离与终端的关联。 - 打开
/dev/null,把0,1,2重新定向到/dev/null,从而防止守护进程意外地从终端接收输入或向终端发送输出。
cppvoid daemonize(void) { int fd; if (fork() != 0) exit(0); // 父进程退出 setsid(); if ((fd = open("/dev/null", O_RDWR, 0)) != -1) { dup2(fd, STDIN_FILENO); dup2(fd, STDOUT_FILENO); dup2(fd, STDERR_FILENO); if (fd > STDERR_FILENO) close(fd); } }
-
用户态和内核态
- 用户态:用户程序运行时的状态。
- 内核态:操作系统运行时的状态。
- 为什么要区分用户态和内核态 ?
- 内核态具备特权,能够操作外部资源。
- 为了系统的安全与稳定。
- 如何实现用户态和内核态 ?
CPU:- 特权寄存器 → 操作系统使用。
- 普通寄存器 → 用户程序使用。
- 内存:
- 内核空间 → 操作系统使用。
- 用户空间 → 用户程序使用。
- 什么时候需要切换 ?
- 用户态程序在需要操作系统完成特权操作的时候才发生切换。
- 什么条件引起用户态与内核态之间的切换 ?
- 系统调用。
- 异常,比如缺页异常。
- 中断。
- 用户态和内核态的区别:
- 运行实体不同。
- 是否具备特权。
- 是否安全和稳定。
- 实现机制。
描述系统调用整个流程
- 系统调用是内核给用户程序提供的编程接口。
- 为什么需要系统调用:
- 内核具有最高的权限,可直接访问所有资源。
- 而用户只能访问受限资源,不能直接访问内存、网络、磁盘等硬件资源。
- 中断:使程序从用户态切换到内核态或者从内核态切换到用户态 。
- 属性:根据中断号去查询中断向量表,从而找到中断处理程序 。
- 中断号。
- 中断向量表。
- 中断处理程序。
- 类别:
- 硬件中断。
- 软件中断 :系统调用对应
int 0x80,中断号是0x80。
- 属性:根据中断号去查询中断向量表,从而找到中断处理程序 。
- 系统调用是否会引起进程或线程切换 ?
- 不一定。
- 如果是阻塞
IO,且IO未就绪,将引起线程切换;线程将由运行态转为阻塞态。 - 如果是非阻塞
IO,且IO未就绪,不会引起线程切换,仅仅涉及到用户态和内核态之间的切换。
- 系统调用引起中断上下文切换 :
- 进程状态先由用户态转为内核态,再由内核态转为用户态。
- 保存运行现场:保存
CPU寄存器原来的用户态指令。 - 运行内核代码:更新
CPU寄存器内容为内核态指令,执行内核代码。 - 恢复运行现场:更新
CPU寄存器内容为用户态指令。
- 系统调用流程:
- 触发中断:
- 将系统调用号放入
eax寄存器。 - 执行
int 0x80。
- 将系统调用号放入
- 切换堆栈:用户态切换为内核态。
- 执行中断处理:
- 根据中断号找到中断处理程序 → 通过
0x80找到system_call。 - 根据系统调用号从系统调用表上找到系统调用处理函数并调用。
- 根据中断号找到中断处理程序 → 通过
- 从中断处理程序返回:通过
iret将返回值返回,并且程序从内核态切换为用户态。
- 触发中断:
CPU 是怎么执行指令的
- 指令是二进制的机器码 ,由程序编译产生。
- 程序编译运行过程 :
- 编译阶段:通过词法句法分析,源代码 → 汇编代码。
- 汇编阶段:汇编代码 → 二进制机器码(
.o目标文件)。 - 链接阶段:目标文件
+库文件 → 可执行程序。 - 载入阶段:
- 将可执行程序加载到内存中 。
- 给进程分配虚拟内存地址空间。
- 创建页表。
- 加载代码段和数据段等数据,并在页表中写入映射关系。
- 加载器把入口指令地址写入程序计数器。
- 将可执行程序加载到内存中 。
CPU采用流水线的方式执行指令;指令执行过程被称之为指令周期 ;CPU周而复始地执行指令周期。- 指令执行过程涉及到两个组件:
CPU和内存,CPU和内存之间通过总线 进行交互。CPU:- 寄存器:
- 通用寄存器 → 存储计算时所需的数据。
- 程序计数器 → 存储要执行的指令的地址(虚拟内存地址)。
- 指令寄存器 → 存储要执行的指令。
- 控制单元(控制器)。
- 逻辑运算单元(运算器)。
- 寄存器:
- 总线:
- 地址总线 → 操作内存地址。
- 数据总线 → 读写内存数据。
- 控制总线 → 用来发送或者接收信号。
- 指令周期:
- 取得指令 :
- 控制单元 从程序计数器 获取指令地址,通过地址总线通知内存准备数据。
- 如果内存数据准备好了,控制单元 通过数据总线 获取指令内容,然后写入指令寄存器。
- 指令译码 :
CPU将指令解析成不同的操作信息。 - 执行指令 :
CPU将指令放入逻辑运算单元进行运算。 - 数据回写 :控制单元 将操作结果通过数据总线回写到内存中。
- 取得指令 :
- 开启下一个指令周期:控制单元 将程序计数器 中的指令地址
+8(如果是64位操作系统)。
内存管理有哪几种方式
- 背景:
- 为了多进程之间的内存地址访问不受影响并且相互隔离,操作系统会为每个进程独立分配虚拟地址空间。
- 每个进程都有虚拟地址空间,而物理内存只有一个,当启动程序过多时,实际使用的内存超过物理内存 ,则会发生内存交换。
- 内存交换:把不常用的内存交换到磁盘中(换出),需要的时候再加载回内存(换入)。
- 虚拟地址需要映射到物理地址。
- 怎么管理映射关系。
- 内存管理的方式有三种:分段 内存管理、分页 内存管理、段页式内存管理。
分段内存管理
- 程序逻辑分段:代码段、数据段、堆段、文件映射段、栈段。
- 虚拟地址:段号 、段内偏移量等构成。
- 根据段号 从段表 找到段内起始地址 加上段内偏移量 得到真实的物理地址。
- 优点:程序无需关注具体的物理内存地址。
- 缺点:
- 会产生外部内存碎片 → 段与段之间的间隙不足以容纳其他程序。
- 每次内存交换都会把一个程序的全部内存换出 ,内存交换效率低。
分页内存管理
- 将虚拟内存 和物理内存 划分为多个连续且固定大小的页 ,
linux页大小为4KB。 - 虚拟地址 通过查找页表 获得物理地址。
- 虚拟内存地址 转换为物理内存地址 的工作是由
CPU中的mmu来处理的。 - 若在页表中找不到物理地址 ,则会触发缺页异常(缺页中断)。
- 优点:
- 页与页是紧密排列的,不会有外部内存碎片。
- 在内存交换中,只会将若干个页换出 ,内存交换效率高。
- 装载程序时,无需一次性把程序装载到物理内存中,运行中需要时才会加载到内存。
- 缺点:
- 分配内存的最小单位是一页 ,可能没用到一页数据,造成内部内存碎片。
- 单级分页(每一个页表大约
4MB) 将耗费更多内存用于存储页表。
段页式内存管理
- 将程序划分为多个逻辑段。
- 将段 划分为多个页。
- 虚拟地址:段号 、段内页 、页内偏移。
- 段页式内存管理得到物理地址需要三次内存访问 :
- 访问段表 ,得到页表起始地址。
- 访问页表 ,得到物理页号。
- 根据物理页号 和页内偏移值 得到物理地址。
- 优点:提高了内存利用率。
- 缺点:增加了系统开销。
malloc 是如何分配内存的
- 背景:
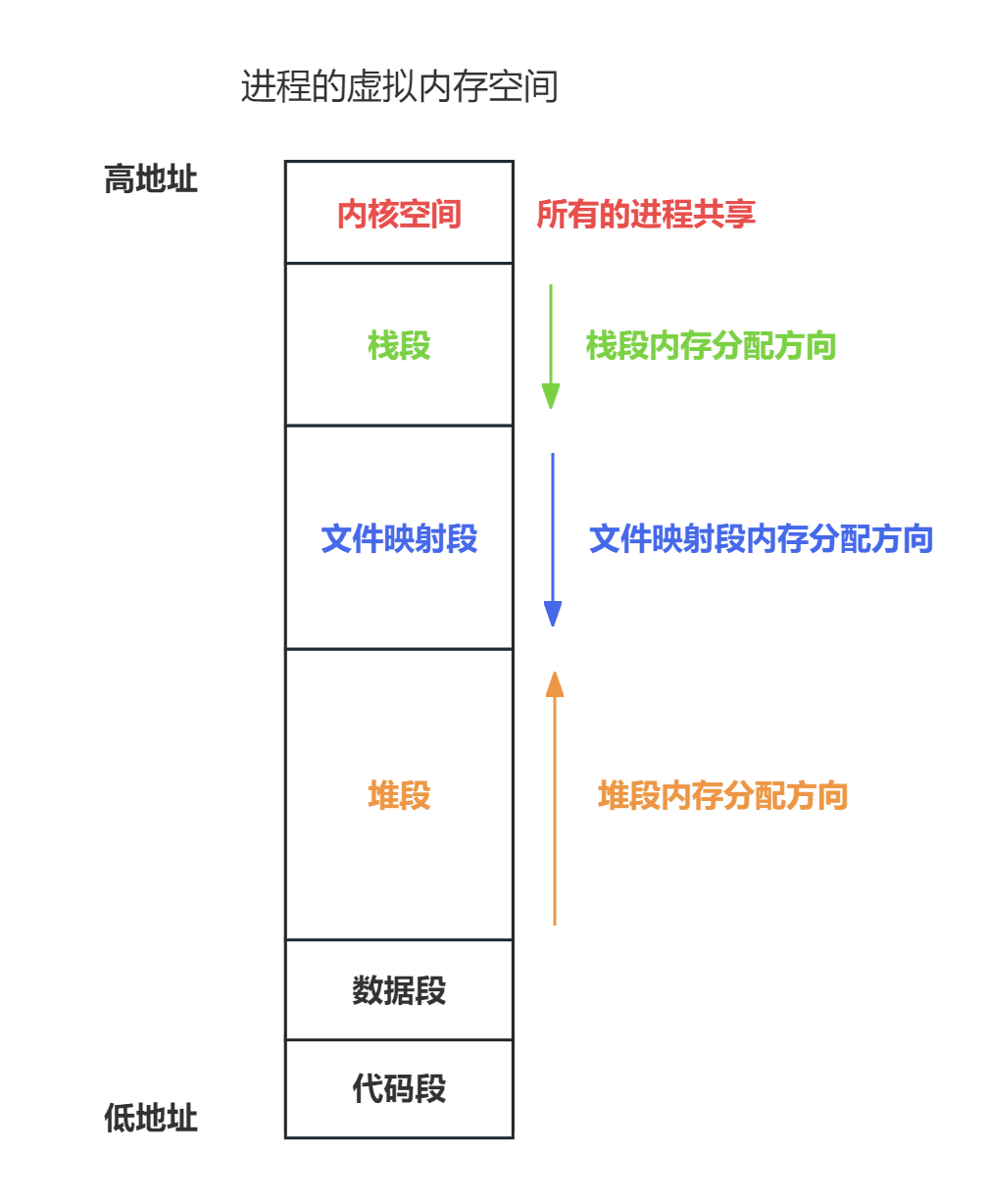
- 进程的虚拟内存空间分布(由低地址到高地址划分):
- 代码段:存储二进制可执行代码。
- 已初始化的数据段:静态常量。
- 未初始化的数据段:未初始化的静态变量或全局变量。
- 堆段:动态分配的内存,由低地址往高地址分配。
- 文件映射段:动态库、共享内存等,由高地址往低地址分配。
- 栈段:局部变量、函数调用的上下文等。
- 内核空间。
malloc分配的是物理内存还是虚拟内存 ?- 分配的是虚拟内存。
- 如果分配的内存没有被访问,则不会映射到物理内存 → 不访问就不会占用物理内存。
- 如果分配的内存被访问了,则通过缺页异常建立虚拟内存到物理内存的映射关系。
- 进程的虚拟内存空间分布(由低地址到高地址划分):
malloc分配内存的过程:- 如果分配内存的大小 < < <
128 KB,则通过brk系统调用 从堆区 分配内存。- 由低地址往高地址分配。
- 优先从内存池中进行分配 ,可以减少系统调用的次数。
- 页表中的映射关系仍然存在 ,可以减少缺页异常的次数。
- 缺点:频繁
malloc/free会出现很多的内部内存碎片。
- 如果分配内存的大小 ≥ \geq ≥
128 KB,则通过mmap系统调用 从文件映射区 分配内存。- 由高地址往低地址分配。
- 每次都会发生系统调用,进行用户态到内核态的切换。
- 第一次访问内存时将发生缺页异常。
- 如果分配内存的大小 < < <
free如何工作:- 释放内存后,是否会把内存归还给操作系统 ?
- 如果是通过
brk系统调用分配内存 ,该内存仍然在malloc的内存池中 ,下次可以继续使用。 - 如果是通过
mmap系统调用分配内存 ,free后会立刻归还给操作系统。
- 如果是通过
free(ptr)传入的是内存地址,如何知道释放多大的内存 ?malloc返回给用户态的内存起始地址比进程的堆空间起始地址多了16个字节。16个字节记录了内存块的描述信息,其中包含了内存块的大小。- 当释放内存时,会对
free传入的内存地址向左偏移16个字节 ,从而分析出该释放多大的内存。
- 释放内存后,是否会把内存归还给操作系统 ?
页面置换算法有哪些
- 背景:
- 缺页异常:当
CPU访问的页面不在物理内存时,便会产生缺页异常,请求操作系统将缺页调入到物理内存。 - 缺页异常处理流程(页面目前位于磁盘上的交换空间 ):
- 在
CPU中访问load M指令 ,接着查找M对应的页表项。 - 若页表项有效,
CPU直接访问物理内存,若无效,则CPU发起缺页异常。 - 操作系统收到缺页异常 ,执行缺页异常处理函数,先查找页面在磁盘中的位置。
- 找到磁盘中的页面后 ,把页面换入到物理内存空闲页中。
- 修改页表中对应页表项的状态位为有效。
CPU继续执行访问物理内存。
- 在
- 缺页异常处理流程(页面目前位于尚未初始化的内存区域 ):
- 进入内核态 、分配物理内存 、更新进程页表映射关系 、返回到用户态 ,恢复进程的运行。
- 如果没有找到物理内存空闲页 ,则需要调用页面置换算法 ,将一个物理页换出到磁盘 ,并将页表项置为无效。
- 缺页异常:当
- 页面置换算法:
- 当出现缺页异常 ,且物理内存无空闲页 时,选择被置换物理页面的过程。
- 选择物理页换出到磁盘,把需要访问的页换入到物理页。
- 目标:尽可能减少页面的换入换出次数。
最佳页面置换算法
- 置换在未来最长时间不访问的页面。
- 每个页需要记录访问时间。
- 实际系统不会实现,代价太大。
先进先出置换算法
- 选择在内存驻留时间最长的页面进行置换。
- 实际系统不会使用,可能没法实现目标。
最近最久未使用置换算法
- 选择最长时间没有被访问的页面进行置换。
- 代价很高,需要在内存中维护更新所有页面的链表,开销较大。
最不常用置换算法
- 选择访问次数最少的页面作为置换页。
- 每个页面都需要记录访问次数。
- 实际不会使用。
时钟页面置换算法
- 对
LRU的一种改进。 - 把所有页面保存在环形链表中 ,并用一个指针指向最久未使用的页面 ,检查具体页的访问位。
1:访问过。0:未访问。- 移动过程中若访问位为
1,则清除访问位(置为0);遇到0,选择为置换页。 - 优化:加一个修改位,由访问位和修改位构成元组 :
u = 0, m = 0→ 未访问且未修改。u = 1, m = 0→ 访问过但未修改。u = 0, m = 1→ 未访问但修改过。u = 1, m = 1→ 既访问又修改过。
写文件时进程宕机,数据会丢失吗
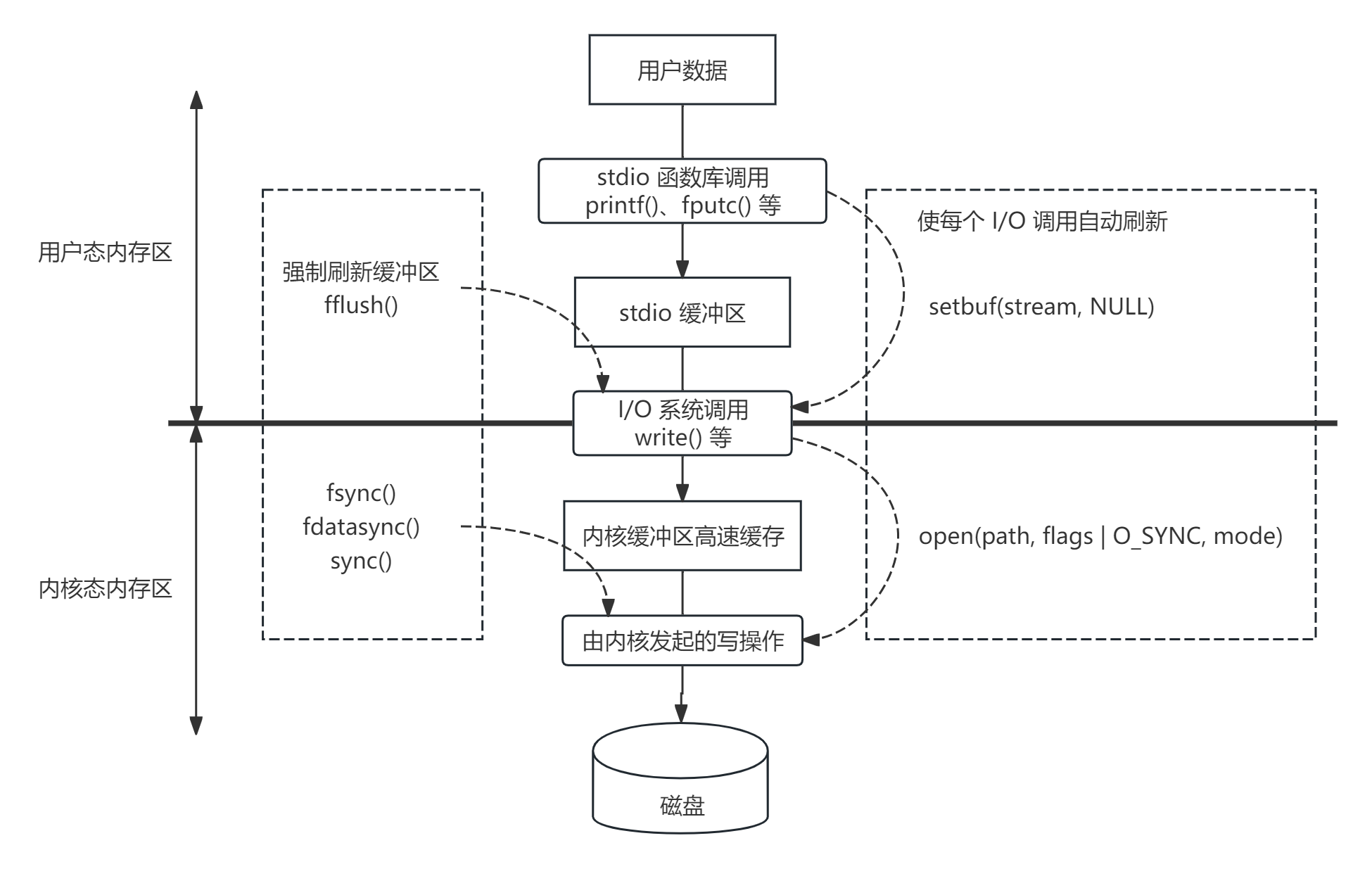
- 写文件流程:
- 通过
stdio函数库选择具体的函数,把数据先写到stdio缓冲区中 → 减少系统调用的次数 。- 也可以使用
setbuf自定义用户缓冲区。
- 也可以使用
- 通过
IO系统调用write等,写到内核缓冲区page cache中 → 减少磁盘 IO 的次数。 - 由内核发起的写操作(我们无法控制)。
- 用户层可以调用
fsync、fdatasync、sync将内核缓冲区中的数据刷到磁盘。
- 用户层可以调用
- 通过
page cache:- 优点:加快对数据的访问、减少磁盘
IO的次数。 - 缺点:
- 占用了物理内存空间,可能会引发频繁的
swap操作。 - 用户层无法优化
page cache的使用策略,通常数据库需要自己实现page管理。
- 占用了物理内存空间,可能会引发频繁的
- 优点:加快对数据的访问、减少磁盘
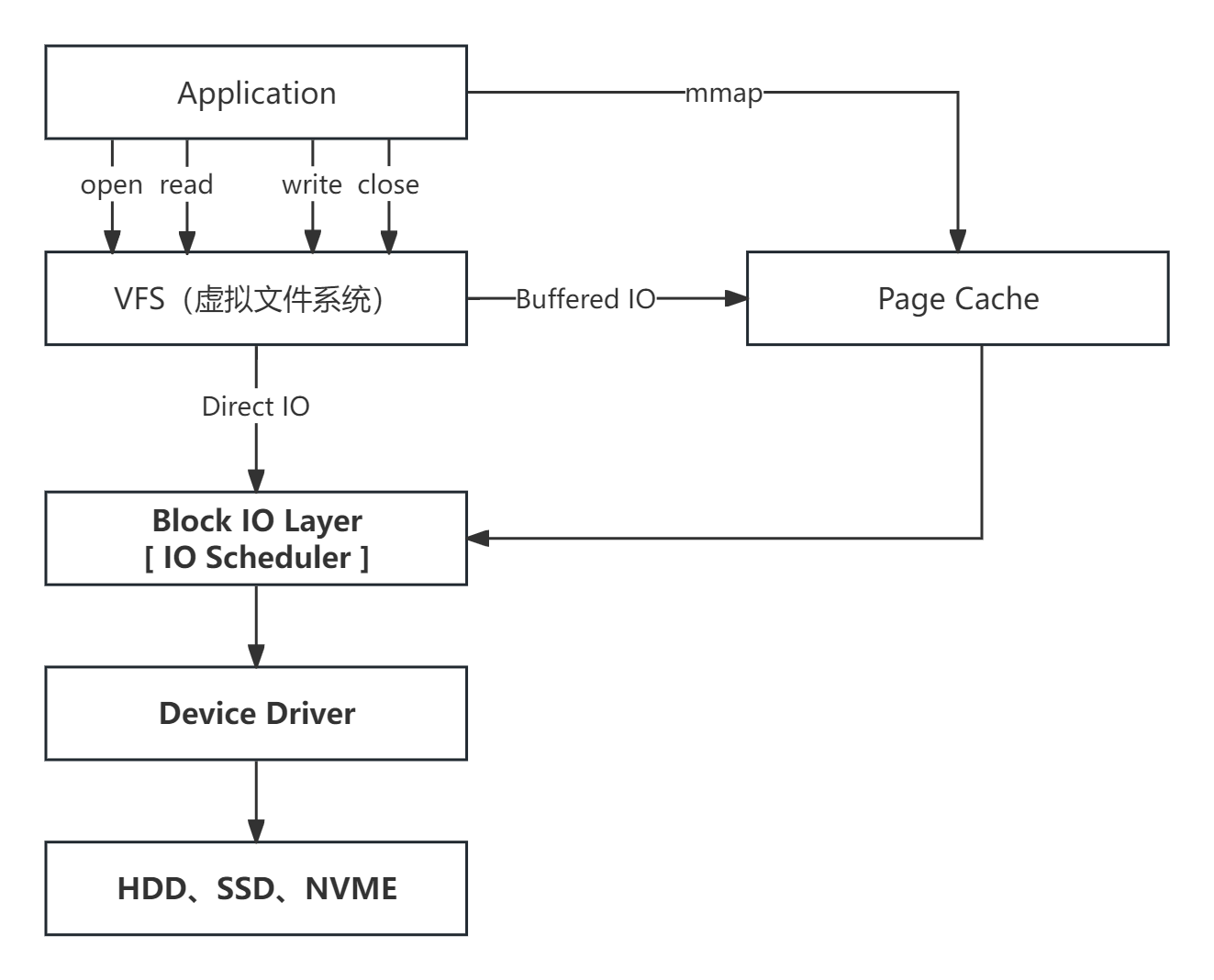
- 两种磁盘
IO方式:- 缓存文件
IO(小文件使用) :- 不直接与磁盘交互,而是通过
page cache进行缓存。
- 不直接与磁盘交互,而是通过
- 直接文件
IO(大文件使用) :- 不通过
page cache,直接与磁盘交互。
- 不通过
- 缓存文件
- 如果写文件没有调用
fflush/write,则数据丢失,因为数据还在用户态缓冲区。 - 如果写文件调用了
fflush/write,则数据在内核缓冲区,只要系统不关闭,那么数据就不会丢失。 - 假设进程宕机后,系统马上也关闭了:
- 如果系统关闭前调用了
fsync、fdatasync、sync,则数据不会丢失。 - 否则数据可能丢失,主要看系统是否调用了下面的三个接口。
- 如果系统关闭前调用了
磁盘调度算法有哪些
- 背景:
- 目的:为了提高磁盘的访问性能。
- 磁盘访问:
- 旋转时间:
4ms。 - 寻道时间:
10ms。 - 数据传输时间:
0.3ms。
- 旋转时间:
- 磁盘调度的主要目标:使磁盘的平均寻道时间最短。
先来先服务
- 按照磁盘访问的请求顺序进行调度。
- 优点:是公平的调度方式。
- 缺点:未做任何优化,平均寻道时间较长。
最短寻道时间优先
- 优先调度与当前磁道距离最近的磁道。
- 优点:平均寻道时间较短。
- 缺点:离密集访问磁道较远的请求将出现饥饿现象。
电梯扫描算法
- 先按一个方向来进行磁盘调度,直到处理完该方向的所有请求后才改变调度方向。
- 优点:解决了最短寻道时间优先的饥饿问题。
- 缺点:中间调度频率高,两边调度频率低。
循环扫描算法
- 朝特定方向进行磁盘调度,返回时直接复位磁头,仍朝原来的方向进行调度。
- 磁道只响应一个方向上的请求。
- 相较于电梯扫描算法,各个位置磁道响应频率相对平均。
进程间通信有哪几种方式
管道
- 父子进程间通信。
- 半双工。
- 速度慢、容量有限。
cpp
#include <unistd.h>
int pipe(int fd[2]);
read(fd[0], buffer, size);
write(fd[1], buffer, size);
cpp
// 获取上传后返回的信息 fileid
int fd[2];
if (pipe(fd) < 0) return; // 创建无名管道:fd[0] → read,fd[1] → write
pid_t pid;
pid = fork(); // fork 子进程
if (pid < 0) return;
if (pid == 0) { // 子进程
close(fd[0]); // 关闭读端
dup2(fd[1], STDOUT_FILENO); // 将标准输出重定向到写管道
// 往标准输出写的东西都会重定向到 fd 所指向的文件 → 当 fileid 产生时输出到管道 fd[1]
// 通过 execlp 执行 fdfs_upload_file → fdfs_upload_file /etc/fdfs/client.conf video.mp4
execlp("fdfs_upload_file", "fdfs_upload_file", s_dfs_path_client.c_str(), file_path, NULL);
// 如果 execlp 调用成功, 那么新程序将开始执行,原程序的代码则不会再继续执行, execlp 后边的代码也就不会执行了
LogError("execlp fdfs_upload_file error"); // 执行失败
close(fd[1]);
} else { // 父进程
close(fd[1]); // 关闭写端
read(fd[0], fileid, TEMP_BUF_MAX_LEN); // 等待管道写入然后读取
// 等待子进程结束, 回收其资源
wait(NULL);
close(fd[0]);
}FIFO
- 命名管道。
- 可以在无关的进程间交换数据。
- 速度慢。
cpp
#include <sys/types.h>
#include <sys/stat.h>
int mkfifo(const char* pathname, mode_t mode);
mkfifo("fifo_file", 0600);
int fd = open("./fifo_file");
read(fd, buffer, size);
write(fd, buffer, size);消息队列
- 消息的链接表,存储在内核中。
- 消息队列独立于进程。
- 速度慢、容量有限。
cpp
#include <sys/types.h>
#include <sys/ipc.h>
#include <sys/msg.h>
// ftok 生产一个 ipc key
key_t ftok(const char* pathname, int proj_id);
// 根据 ipc key 获取消息队列唯一标识
int msgget(key_t key, int flag);
int msgsnd(int msqid, const void* ptr, size_t size, int flag);
int msgrcv(int msqid, void* ptr, size_t size, long type, int flag);
key_t key = ftok(".", 'z');
int msgctl(int msqid, int cmd, struct msqid_ds* buf);共享内存
- 多个进程共享的一块存储区。
- 最快的一种
IPC。 - 需要和信号量配合使用。
cpp
#include <sys/types.h>
#include <sys/ipc.h>
#include <sys/shm.h>
// ftok 生产一个 ipc key
key_t ftok(const char* pathname, int proj_id);
// 根据 ipc key 获取共享内存唯一标识
int shmget(key_t key, size_t size, int flag);
void *shmat(int shm_id, const void* addr, int flag);
int shmdt(void* addr);
int shmctl(int shm_id, int cmd, struct shmid_ds* buf);信号量
- 信号量是一个计数器 ,用于进程间的互斥与同步。
cpp
#include <semaphore.h>
/*
pshared == 0 → 一个进程中的多线程之间通信
pshared != 0 并且是共享内存的唯一标识 → 多进程之间通信
*/
int sem_init(sem_t* sem, int pshared, unsigned int value);
int sem_post(sem_t* sem);
int sem_wait(sem_t* sem);
int sem_close(sem_t* sem);
int sem_destroy(sem_t* sem);信号
- 信号本质上是一种软中断 ,一种通知机制。
- 处理方法:忽略、捕获、默认动作。
cpp
sighandler_t signal(int signum, sighandler_t handler);
int kill(pid_t pid, int sig);
cpp
/*
默认情况下,往一个读端关闭的管道或 socket 连接中写数据将引发 SIGPIPE 信号。
我们需要在代码中捕获并处理该信号, 或者至少忽略它。
因为程序接收到 SIGPIPE 信号的默认行为是结束进程,而我们绝对不希望因为错误的写操作而导致程序退出。
SIG_IGN 忽略信号的处理程序
*/
signal(SIGPIPE, SIG_IGN); // 忽略 SIGPIPE 信号socket
- 不会局限是否在同一机器。
线程同步的方式
- 什么是线程同步 ?
- 让线程对临界资源的访问按照规定的次序执行。
- 主要解决线程之间的协同问题。
- 为什么需要线程同步 ?
- 在一个进程中的所有线程共享该进程的资源。
- 如果不干预线程对临界资源的访问可能造成意想不到的错误,甚至导致进程崩溃。
- 线程同步有哪些方式 ?
互斥锁
- 确保同一时间只有一个线程访问临界资源。
- 当锁被占用时,其他试图获取该锁的线程都会进入阻塞状态。
- 当锁被释放时,会通过信号通知其他被锁阻塞的线程,被阻塞线程可能修改为就绪状态,也可能直接调度执行。
- 如何实现互斥锁:
- 互斥锁首先需要做一个内存标记 ,记录的是线程
ID,因为互斥锁需要进行线程切换。 - 互斥锁是为了保护临界资源,同时只允许一个线程去访问临界资源,所以会有一个阻塞队列,通过阻塞队列唤醒其它线程去访问临界资源。
- 要屏蔽中断。
- 底层硬件自旋锁。
- 互斥锁首先需要做一个内存标记 ,记录的是线程
- 互斥锁的表现:
- 先在用户态自旋一会儿。
- 获取失败,把任务挂起(放到阻塞队列中),核心会切换其它线程去执行。
- 休眠一段时间再次尝试获取锁。
c
// 声明一个互斥量
pthread_mutex_t mtx;
// 初始化
pthread_mutex_init(&mtx, NULL);
// 加锁
pthread_mutex_lock(&mtx);
// 解锁
pthread_mutex_unlock(&mtx);
// 销毁
pthread_mutex_destroy(&mtx);自旋锁
- 当多个线程竞争锁的时候,只允许一个线程去访问临界资源,其他的线程不会处于阻塞态 ,也就是不会进行线程切换 ,会占用
CPU核心 ,轮询使用临界资源的线程是否释放锁。 - 在实际自旋锁的实现过程中,它不会一直占用
CPU不断地去轮询,它可能也会切换线程,但是和互斥锁的切换是有差别的:- 互斥锁被切换出去,会处于阻塞态 ,当互斥锁被释放的时候,会从阻塞队列中取出一个线程,把它转化为就绪态 ,进入就绪队列,未来被系统调度的时候再把它从就绪队列中取出,转化为运行态去运行。
- 自旋锁被切换出去,会处于就绪态,进入就绪队列,时刻等待被系统调度。
- 自旋锁适用于锁持有时间短的场景。
c
// 声明
pthread_spinlock_t spin;
// 初始化
pthread_spin_init(&spin, PTHREAD_PROCESS_PRIVATE);
// 加锁
pthread_spin_lock(&spin);
// 解锁
pthread_spin_unlock(&spin);
// 销毁
pthread_spin_destroy(&spin);条件变量
- 用户态的条件让当前线程发生阻塞,当另外一个线程判断特定条件为真时,通知当前线程解除阻塞。
- 对条件的判断需在互斥锁的保护下进行。
- 条件变量需要和互斥锁一起使用。
读写锁
- 当加写锁 成功时处于写状态 ,任何试图加读锁或写锁的线程都阻塞。
- 当加读锁 成功时处于读状态 ,其他试图加读锁的线程不阻塞 ,而试图加写锁的线程阻塞。
- 读写锁适用于读远大于写的场景。
MySQL数据库中的行锁 :S锁(读锁) 、X锁(写锁)。
c
// 声明一个读写锁
pthread_rwlock_t rwlock;
// 在读之前加读锁
pthread_rwlock_rdlock(&rwlock);
// 读完释放锁
pthread_rwlock_unlock(&rwlock);
// 在写之前加写锁
pthread_rwlock_wrlock(&rwlock);
// 写完释放锁
pthread_rwlock_unlock(&rwlock);
// 销毁读写锁
pthread_rwlock_destroy(&rwlock);信号量
- 非负的整数计数器,用来实现对资源的控制,既可以用于线程之间、也可以用于进程之间。
- 信号量适用于多份临界资源的访问。
- 只有当信号量大于
0的时候,才能访问资源。 - 比如
A线程调用sem_wait将信号量减为0了,A线程发生阻塞;如果B线程调用sem_post把信号量+ 1,将会解除A线程的阻塞,A线程继续执行。
c
// 初始化信号的个数
// pshared = 0 → 线程之间通信
// pshared > 0 → 进程之间通信
sem_init(&sem, pshared, value);
sem_wait(); // P 操作:--操作
sem_post(); // V 操作:++操作线程通信的方式
- 信号:
pthread_kill(thread, 0)→ 通常用于检测其他线程是否存活 → 返回0代表存活,返回错误代表线程不存在。 - 线程同步的方式。
互斥锁和自旋锁的区别
- 共同点:
- 都具备排他性。
- 谁持有锁谁释放锁。
- 不同点:
- 获取锁失败后的行为:
- 自旋锁轮询检测。
- 互斥锁进行阻塞。
- 获取锁失败后的行为:
一个线程加锁了,另一个线程可以解锁吗 ?
- 只有条件变量是通过另外一个线程来解锁的。
虚假唤醒
- 可能会有多个线程在
pthread_cond_wait休眠。 pthread_cond_signal会唤醒至少一个休眠的线程 ,也就是可能会唤醒多个休眠的线程。- 如果使用
if,消费者线程被唤醒后会少了重新检查条件的步骤,所以使用while。- 为什么消费者线程被唤醒后要重新检查条件 ? 也就是为什么会出现虚假唤醒 ?
- 在多线程环境下,可能会发生信号劫持 ,也就是
pthread_cond_signal唤醒了多个休眠的线程。
- 在多线程环境下,可能会发生信号劫持 ,也就是
- 为什么消费者线程被唤醒后要重新检查条件 ? 也就是为什么会出现虚假唤醒 ?
cpp
// 消费者线程
pthread_mutex_lock(&mtx);
...
while(condition) { // while 用来解决虚假唤醒
pthread_cond_wait(&cond, &mtx);
// pthread_cond_wait 内部:
// 1. 先 unlock(&mtx)
// 2. 在 cond 休眠
// --- __add_task 时唤醒
// 3. 在 cond 唤醒
// 4. 加上 lock(&mtx);
}
... 执行逻辑
pthread_mutex_unlock(&mtx);
// 生产者线程
pthread_mutex_lock(&mtx);
... 修改条件
pthread_mutex_unlock(&mtx);
pthread_cond_signal(&cond);
cpp
static inline void
__add_task(task_queue_t *queue, void *task) {
// 不限定任务类型,只要该任务的结构起始内存是一个用于链接下一个节点的指针
// link 指向 task 的 next 指针
void **link = (void**)task;
*link = NULL;
spinlock_lock(&queue->lock);
*queue->tail /* 等价于 queue->tail->next */ = link;
queue->tail = link;
spinlock_unlock(&queue->lock);
// 唤醒休眠的线程
pthread_cond_signal(&queue->cond);
}
static inline void *
__pop_task(task_queue_t *queue) {
spinlock_lock(&queue->lock);
if (queue->head == NULL) {
spinlock_unlock(&queue->lock);
return NULL;
}
task_t *task;
task = queue->head;
void **link = (void**)task;
queue->head = *link;
if (queue->head == NULL) {
queue->tail = &queue->head;
}
spinlock_unlock(&queue->lock);
return task;
}
static inline void *
__get_task(task_queue_t *queue) {
task_t *task;
// 虚假唤醒
while ((task = __pop_task(queue)) == NULL) {
pthread_mutex_lock(&queue->mutex);
pthread_cond_wait(&queue->cond, &queue->mutex);
pthread_mutex_unlock(&queue->mutex);
}
return task;
}CAS 是怎样的一种同步机制
-
CAS属于原子操作。 -
什么是原子操作 ?
- 底层级别的同步操作:
CPU指令。 - 不会被调度机制所打断的操作。
- 原子性:该原子操作是不可分割的,要么都做完了,要么还没开始,不会被其他线程看到只完成了一部分。
- 底层级别的同步操作:
-
什么时候使用原子操作 ?
- 背景:锁会造成性能损耗。
- 操作简单、冲突较少。
-
C++ 中的
CAS(compare and swap):-
CAS操作组成:- 内存中的值
V。 - 期待值
Expect。 - 替换值
New Value。
- 内存中的值
-
CAS操作流程:- 比较内存中的值与期待值是否相等。
- 如果相等,写入替换值 ,并返回
true。 - 如果不相等,直接返回
false。
cpp// 基于 CAS 实现自旋锁 #include <atomic> class SpinLock { public: SpinLock() : _flag(false) {} void lock() { bool expect = false; while (!_flag.compare_exchange_weak(expect, true)) { expect = false; // 解决伪失败问题 if (_flag.load() == true) { break; } } } void unlock() { _flag.store(false); } private: std::atomic<bool> _flag; };
-
-
ABA问题:- 线程
1取出A,修改为B,再次修改为A。 - 线程
2取出A,由于时间差没有感知到A值的变化。 - 解决:给
A增加版本号 ,将ABA问题转变为1A2B3C问题。
- 线程
-
伪失败问题:
compare_exchange_weak允许偶然错误返回(虽然内存中的值与期待值一样,但是返回了false)。- 通过循环解决。
compare_exchange_weak比compare_exchange_strong性能高。