4 - 拆包
小心拆包C-887
根据合同和发货注意比较发货范围的内容:
检查危险符号的内容。如果任何零件损坏或缺失,立即联系客服部门。
保存所有包装材料,以防产品需要返厂。
5 - 安装
本章中
安装一般注意
安装PC软件
确保通风
接地C-887
连接C-887到电源
安装Hexapod
用线缆套件连接Hexapod到C-887
为轴A和B连接定位器
连接模拟信号源
连接数字输入和输出
连接PC
连接EtherCAt主站
5.1 安装一般注意
可以在任何方位安装hexapod。
注意
 不允许机械负载和碰撞!
不允许机械负载和碰撞!
在hexapod, 要移动的负载和周边之间不允许会损坏hexapod的机械负载和碰撞。
- 仅通过基板搬运hexapod。
- 在安装负载前,确定用一个仿真程序确定hexapod的负载的限制值和工作空间。
- 在安装过程中避免在运动平台上大应力和扭力。
- 为了避免hexapod系统的无意失效并且导致hexapod系统的位置变化,确定电源不被中断。
- 确定hexapod, 要移动的负载和周边之间碰撞在hexapod工作空间中是不可能的。
5.2 安装PC软件
需要C-887和PC之间的通信,使用GCS命令配置C-887以及发送运动命令。各种PC软件应用为此目的可用。
5.2.1 进行初始安装
附件
- Windows(8.1, 10; 32位,64位)或者Linux操作系统PC,并且至少30MB空闲空间。
- 由来自PI软件的数据存储介质(在交货范围中包括)
在Windows中安装PC软件
- 双击安装目录(CD上根目录)中PISoftwareSuite.exe启动安装向导。
InstallSheild Wizard窗口打开来安装这个PC软件。
- 在平面上安装说明。
PI软件套件包括以下组件:
- 与NI LabVIEW软件一起使用的驱动程序。
- GCS动态程序库。
- PIMikroMove
- 用于更新C-887固件的PC软件
- 用于更新PC软件的PI Update Finder
- USB驱动程序
在Linux上安装PC软件
- 解包PI软件CD上/Linux目录的tar文档到你PC上的一个目录。
- 打开一个终端并且进入那个你解包这个tar文档的目录。
- 以超级用户登录(root特权)
- 输入./INSTALL来启动安装。在输入命令时注意大小写。
- 按照窗口上说明。
你可以安装的各自组件。
5.2.2 安装更新
PI持续改进PC软件。
- 安装最新版本的PC软件和定位器数据库。
要求
- 激活对Internet的连接。
- 如果你的PC使用Windows操作系统:
- 你从PI网站下载PI Update Finder手册(A000T0028)。链接在PI软件CD上\Manuals文件夹中"AT000T0081-Downloading Manuals from PI.pdf"。
在Windows中更新PC软件和PISTAGES3.DB
- 使用PI Update Finder:
- 按照PI Update Finder手册中说明(A000T0028)。
在Linux中更新PC软件
- 打开网站Open the website Software Suite
- 向下滚动到Downloads。
- 点击ADD TO LIST+对应PI Software Suite C-990.CD1
- 点击REQUEST
- 填完下载请求表格并且发送请求。下载链接将被发送到输入的邮箱地址。
- 在你PC上解包存档文件到一个单独的安装目录。
- 进入有解包文件目录的linux子目录。
- 通过在console上输入命令tar -xvpf <存储文件名>解包linux目录中存档文件。
- 以超级用户登录PC(root特权)。
- 安装更新。
信息
如果软件在Downloads区域中缺失或者下载时发生问题:
- 联系我们的客服部门。
在Linux中更新PISTAGE3.DB
- 联系客服部门获取最新版本PISTAGE3.DB的定位器数据库。
- 以超级用户登录到PC(root特权)。
- 安装从我们客服部门收到的更新到你的PC。
5.2.3 安装自定义定位器数据库
PI提供一个带有自定义定位器的CD,它有以下内容:
- Program Import PI CustomStage
- 带有定位器参数设置的自定义定位器数据库。
为了在PC软件中选择参数设置,必须首先通过Import PI Custom Stage软件插入它到PIStages3定位器数据库。
- 通过双击CD根目录中Import_PI_CustomStage.exe安装自定义定位器数据库。来自自定义定位器数据库的参数集被插入到PIStage3。
如果一条自定义定位器数据库安装失败的消息出现:
- 更新你PC上PIStage3数据库,见"安装更新"。
- 重复自定义定位器数据库的安装。
5.3 确保通风
高温会使C-887过热。
- 设置C-887到顶端距离至少10cm以及到侧边距离5cm。如果这不可能,确认这个区域充分地冷却。
- 确定在安装位置充分地通风。
- 保持环境温度到一个非临界级别(5℃到40℃)。
5.4 接地C-887

C-887没有通过电源连接接地。
- 在C-887外壳保护地导体符号上连接螺纹销到保护地导体。
5.5 连接C-887到电源
信息
当hexapod连接到控制器24V Out 7 A插座,控制器地电源电压也用于这个Hexapod。
仅限C-887.522, .523, .533型号:
E-Stop插座控制一个有N/O触点的内部继电器,它使得用于hexapod的24V输出(24V Out 7 A插座)失效或者生效。
要求
- 关闭C-887,即,on/off开关位于O位置。
- C-887安装靠近电源,使得电源插头可以快速和容易地从主电源断开。
工具和配件
- 包括24V宽输入范围电源(对应线路电压在50或60Hz的AC 100和240V之间)。
- 包括电源线。
- 替代:足够大的电压线。
连接C-887到电源
- 连接电源的M12接头(f)到C-887的24V In 8 A接头。
- 连接电源线到电源适配器。
- 用电源线连接电源适配器到电源插座。
5.6 安装Hexapod
5.6.1 确定Hexapod的工作空间和允许负载
- 根据文档" PI Hexapod Simulation Tool - Determining the Workspace and the Permissible Load for the Hexapod"中说明。
信息
仅在伺服模式启动时,限值才有效。仿真程序确定的hexapod负载的限值仅在对运动平台的轴启动了伺服模式时才有效。当伺服模式关闭时,最大保持力是基于hexapod structs中执行机构的自锁,并且小于启动伺服模式时的限值(见hexapod手册)。
信息
Hexapod的负载的限值根据以下因素变化:
- 伺服模式的生效状态。
- Hexapod的安装位置。
- 要被移动的负载:在运动平台上质量和质心位置。
- 作用在运动平台上的力和扭矩。
- 在操作过程中运动平台能够接近的位置和方位(平移和转动坐标)
信息
用于碰撞检查的可选的PIVeriMove hexapod软件使得数学上检查hexapod, 负载,和周边之间可能碰撞成为可能。当hexapod位于受限安装空间和/或操作空间上受限的负载时,推荐使用这个软件。有关PIVeriMove的激活和配置,见C887T0002技术注意(在软件发货范围内)。
5.6.2 接地hexapod
- 按照hexapod手册中说明。
5.6.3 在一个表面上安装hexapod
- 按照hexapod手册中说明。
5.6.4 在hexapod上固定负载
- 按照hexapod手册中说明。
5.7 用线缆套件连接Hexapod到C-887
信息
当hexapod连接了控制器的24V Out 7 A插座,控制器的电压也用于hexapod。
仅限C-887.522, .523, .532, 533型号:
E-Stop插座控制一个带N/O触点的内部继电器,它使得用于hexapod的24V输出(24V Out 7A插座)失效或者生效。
信息
如果需要安装有效标志的安全功能:
- 定义和实现合适的措施。可能措施的示例:
- 如果通过C-887向hexapod提供电源,用户合适的安全技术中断电源线。
- 为hexapod使用有合适安全技术的外部电源适配器。
- 仅C-887.522, .523, .532, .533型号:连接合适的安全技术到E-Stop插座。进一步信息参考"使用E-Stop"。
信息
从序列号121017873起,C-887也支持数据传输使用BiSS协议的hexapod微型机器人。
用线缆套件连接hexapod到C-887
- 根据hexapod手册中说明。
- 仅限C-887.522, .523, .532, .533型号:连接E-Stop插座,使得轴运动可能。详细,见"使用E-Stop插座"。
5.8 为轴A和B连接定位器
注意:
 如果连接了一个错误电机会损坏
如果连接了一个错误电机会损坏
连接定位器到一个步进电机,会造成对C-887的不可修复损坏。
- 仅连接带DC电机和集成电机驱动器的定位器到C-887的插座A和B。
信息
C-887的电机A和电机B插座(D-Sub 15(f))是为了连接带DC电机和集成电机驱动器的定位器。
如果在hexapod系统被发送前,你告诉PI有关电机类型,PI将根据你的订单配置C-887,因而相应的定位器类型被分配给了C-887的轴A和B。
- 如果你只订购了一个定位器,相应类型被分配给了轴A。
- 如果你订购了两个定位器,相应类型按字母升序被分配给 了轴A和B,例如,e, M-403.1DG 给 A 和 M-403.2PD 给 B; M-414.1PD 给 A 和 M-511.DD1 给 B。有关分配定位器类型的进一步信息,参考"轴A和B的操作参数"。
要求
- 关闭C-887,即,on/off开关位于O位置。
- 你已经阅读和理解了定位器的用户手册。
- 根据在相应用户手册中的描述,你已经安装了定位器。
工具和配件
- 来自PI的定位器安装了DC电机和PWM放大器,作为可选配件获取。
连接轴A和B的定位器到C-887
- 连接定位器到Motor A和Motor B插座。
- 如果已知,注意定位器类型分配的C-887设置。
Motor A处的定位器以轴A控制,而Motor B处的定位器以轴B控制。
- 使用一体式螺丝固定连接防止意外断开。
5.9 连接模拟信号源
所有C-887型号在I/O插座上安装了4路模拟输入。
C-887.521 523, .531和.533型号还在Analog In 5和Analog In 6 BNC插座安装了两路高分辨模拟输入。
参考"模拟输入说明"。
模拟输入信号的应用可能性:
- 在快速对齐例程中使用。你可以在"Fast MultiChannel Photonics Alignment(FMPA)"文档中找到更多信息。
- 在扫描过程中使用:
- 由C-887执行扫描过程:见AAP,FIO,FLM,FLS,FSA,FSC,FSM命令。
- 由PIMikroMove(在PIMikroMove的Tools菜单中获取)执行扫描过程:参考PIMikroMove手册。
- 在宏中使用:
- 条件运动宏:见WAC
- 条件停止宏:见MEX
- 条件跳转宏指针:见JRC
- 复制输入状态到一个变量:见CPY
在"控制器宏"中,找到宏的详情和示例。
信息
对于动态和高分辨应用,诸如,快速对齐例程或者扫描过程,推荐使用Analog In 5和Analog In 6 BNC插座。在I/O插座上模拟输入合适在宏中使用。
工具和配件
- 根据输入规格的合适信号源,例如,用于连接Analog In 5或Analog In 6的F-712.PM1光度计(作为可选配件获取)。
连接一个模拟信号源
- 连接信号源到模拟输入。
- 固定接头防止意外断开。
5.10 连接数字输入和输出
可以按以下使用C-887(TTL信号)的I/O插头上数字输入和输出:
- 输出:用DIO命令设置状态。
- 输入:用DIO?命令获取状态,在宏中使用:
- 条件运行宏:见WAC
- 条件停止宏:见MEX
- 条件跳转宏指针:见JRC
- 复制输入状态到一个变量:见CPY
在"控制器宏"中找到宏的详情和示例。
工具和配件
- 合适的HD D-Sub 26接头(m)
- 如果你想要使用数字输入:根据输入说明,合适的信号源。
- 如果你想要使用数字输出:根据输出说明,用于信号评估的合适设备。
连接数字输入和输出
- 数字输入:连接信号源到I/O插座的管脚7,16,17和25之一。
- 数字输出:连接用于信号评估的设备到I/O插座管脚8,9,18和26之一。
- 固定接头防止意外断开。
5.11 连接PC
C-887和PC之间的通信可以用来配置C-887并且用GCS命令发送运动指令。C-887有用于此目的的以下接口:
- TCP/IP
- RS-232接口。
在这部分中,你学习如何在C-887和PC之间建立相应的线路连接。在"通过TCP/IP接口建立通信"和"通过RS-232接口建立通信中找到C-887和PC之间建立通信所需的步骤"。
5.11.1 通过TCP/IP接口连接C-887
要求
- 如果C-887直连PC:PC有一个未用的RJ45以太网连接插座。
- 如果C-887和PC在一个网络中一起操作:一个对网络的访问点对C-887可用;如果需要,为此目的,一个合适的集线器和交换机连接到这个网络。
工具和配件:
- 如果C-887直连PC,交叉网线(C-815.561包含在交付范围内)
- 如果C-887连接了一个网络访问点:直连网线(C-815.553包含在交货范围内)。
C887直连PC
- 使用交叉网络线路连接C-887的RJ45插座到PC的RJ45以太网插座。
连接C-887到PC所在的网络
5.11.2 通过RS-232接口连接C-887
要求
- PC有一个未使用的RS-232接口(也称"串口"或者"COM端口",例如,COM1或COM2)
工具和配件
- RS-232非调制线缆(C-815.34包含在交货范围内)
连接C-887到PC
- 用非调制线缆连接C-887的RS-232面板插头和PC的RS-232接口(一个DB 9面板插头(m))。
5.12 连接EtherCAT主站
C-887.53x型号(.53x代表。53, .531, .532和.533)安装了EtherCAT接口。
在"EtherCAT接口描述"文档中可以找到EtherCAT接口使用的信息。

由于不正确连接的故障
错误线缆连接会导致错误寻址和通信故障。
- 使用Port1 RJ45插座(左)连接C-887.53x和EtherCAT主站(Port 2 RJ45插座(右)是为了连接下个EtherCAT从站)。
- 在一个物理网络中不要一起使用EtherCAT和标准的Ethernet。如果可能,对EtherCAT和标准Ethernet连接使用不同颜色。
工具和配件
- 合适的线缆:
- CAT 5或以上线缆,直连或交叉
- 线缆长度:0.3到100m
连接EtherCAT主站
- 通过合适线缆连接EtherCAT主站和C-887.53x的Port 1 RJ45。
6 启动
本章中
启动的一般注意
启动C-887
通过TCP/IP接口建立通信
通过RS-232接口建立通信
启动运动
6.1 启动的一般注意
小心

由移动零件造挤伤风险。
在hexapod和静止零件或障碍之间碰撞造成轻伤风险。
- 保持手指原理被被移动零件碰到的区域。

控制器的错误配置
控制器使用的配置数据(例如,集合数据和伺服控制参数)必须适配hexapod。如果使用错误的配置恩济,hexapod会由于不受控运动或碰撞而损坏。
当启动或重启控制器,使用从ID芯片装载的数据适配配置文件。
- 一旦你通过TCP/IP或RS-232建立了通信,发送CST?命令。响应展示控制器适配的hexapod。
- 仅用其配置数据适配这个hexapod的控制器操作这个hexapod。
注意:

错误定位器类型的分配
如果一个错误的定位器类型被分配给了轴A或B,会装载不适合的参数设定。不适合的参数设定会在启动和操作中对定位器造成损坏。
- 确定分配的定位器类型匹配连接的定位器。
- 仅在仔细思考后,为轴A和B更高参数值。
注意:由于碰撞造成损坏

碰撞会损坏hexapod, 要移动的负载和周边。
- 确定在hexapod工作空间中在hexapod, 要移动的负载和周边之间不可能发生碰撞。
- 不要再被移动部件碰到的地方放置任何东西。
- 如果控制器故障发生,立即停止运动。
注意:由于没有拆除运输保护件造成损坏。

如果hexapod的运输保护件没有被拆除并且控制仅限移动时,损坏会发生。
- 在你启动hexapod系统前,拆除运动保护件。
注意:

由无意的位置改变造成损坏
仅在为运动平台的轴启动伺服模式时,由仿真程序确定的hexapod的负载限值才成立。当关闭伺服模式时,最大保持李是基于hexapod structs的执行机构的自锁,并且低于启动伺服模式时的限值(见hexapod手册)。
当hexapod的实际负载超过了基于执行机构自锁的最大保持力时,在以下情况中发生hexapod的无意位置变化。
- 关闭C-887
- 重启C-887
- 关闭hexapod的运动平台的轴的伺服模式,例如,通过使用E-Stop插座。
结果,在hexapod, 要移动的负载和周边之间,碰撞是可能的。碰撞会损坏hexapod,要移动的负载或周边。
- 在你关闭伺服模式,重启或关闭C-887前,确定hexapod的运动平台的实际负载不超过基于执行机构的自锁的最大保持力。
注意:

在寻找参考位置移动过程中碰撞造成损坏
在参考移动中,hexapod运动无法预计。要给碰撞检查或者预防不发生,即使一个用于防止碰撞的配置用PIVeriMove hexapod软件存储在C-887上用于碰撞检查。在参考移动中,忽略用NLM和PLM命令为hexapod的运动平台已经设置了软限位。
结果,在hexapod, 要移动的负载和周边之间,碰撞是可能的。碰撞会损坏hexapod, 要移动的负载以及周边。
- 确定在hexapod的参考移动中, hexapod, 要移动的负载,和周边之间没有碰撞。
- 在参考移动中,在运动部件会碰到的区域中不要防止任何物体。
- 在一个成功参考移动后,为了从任何指定位置返回到参考位置(默认:0位置),为相应的目标位置提供一个命令。
注意:

由于hexapod不受控运动造成损坏
在以下情况中,Hexapod的运动平台的速度和加速度不是由C-887指定的:
- 目标位置的循环转移
- 当发送一条新运动命令时,hexapod(轴X, Y, Z, U, V, W)仍然在运动中。在hexapod的运动平台的速度和加速度没有被重新计算下,先前目标位置因而被重写。
Hexapod的平台接着在一条未定义路径上移动。在这条未定义路径上,与hexapod周边碰撞是可能的。碰撞会损坏hexapod,要移动的负载以及周边。
如果你通过目标位置的反复传送触发运动:
- 仅设置其相互之间距离的目标位置最大与Path Control Step Size参数(ID 0x19001504)的值一样大。
如果你用运动命令控制点到点运动:
- 在hexapod(轴X,Y,Z,U,V,W)仍在运动时,避免发送新目标位置。
- 如果在hexapod(轴X,Y,Z,U,V,W)仍在运动时,必须发送新目标位置:仅使用运动命令设置其最大偏离当前位置Path Control Step Size参数(ID 0x19001504)值的目标位置。
信息
用于碰撞检查的可选PIVeriMove hexapod软件使得数学上检查hexapod ,负载和周边之间可能的碰撞成为可能。当hexapod位于一个受限安装空间和/或用一个空间受限负载操作,推荐使用这个软件。PIVeriMove的激活和配置的详情,见C887T002技术注意(在软件发货范围内)。
信息
对应ID芯片探测的应用注意:
- 在你替代连接的hexapod前,在PC上包括控制器的当前参数值。
- 仅在关闭控制器时,连接hexapod。
- 当固件完成启动,发送CST命令来检查安装的配置是否已经由重启这个控制器而被激活。当响应是"NOSTAGE"时,重启是必要的。用RBT命令可以重启这个控制器。
- 发送ERR?命令检查配置是否成功被激活。如果对ERR?的响应包含了错误代码244或211,对应新hexapod的配置不在控制器中(可能例如,对应客户定制的hexapod或者新标准的hexapods)。为了接收合适的配置文件,联系我们客服部门。为了新配置文件的安装,见"更新固件和配置文件"。
- 发送VER?命令检查保存在ID芯片上对应这个hexapod类,序列号和生产日期的信息。例如:

信息:
C-887和PC之间的通信可以用于配置C-887和发送GCS命令的运动指令。
- 通过无需另外设置的RS-232接口,通信是可能的。
- 通过TCP/IP通信,需要一次相应地调整接口参数。
信息
C-887的通信接口(TCP/IP,RS-232)在同时有效。按命令行达到的顺序执行命令。但若干通信端口的同时使用引起PC软件的问题。
- 总是仅使用C-887的一个接口。
信息
当启动或重启,C-887为所有轴自动启动伺服模式。当对hexapod(X, Y Z, U, V, W)的运动平台的轴关闭伺服模式时,在启动参考运动时,它自动被开启。
信息
对于装了增量传感器的轴,只能在一个成功参考移动(也称"初始化")后,运动才能被控制。
在参考移动后,hexapod轴的行为是由Behaviour After Reference Move(ID 0x07030401)和Target For Motion After Reference Move参数(ID 0x070402)。取决于参数值,在参考运动后,平台的轴可以被自动移动到,例如,一个指定位置。
- 参数值0x07030401=0:在参考运动后,轴留在参考位置。
- 参数值0x07030401=1:在参考运动后,轴移动到由参数0x07030402指定的位置。
对于装了绝对测量传感器的轴,不需要参考运动。但仍然推荐对这些轴使用FRF命令。对于安装了绝对传感器的轴,FRF不启动参考运动,但设置目标位置为当前位置值。以上描述的参数值也生效,因而轴可以被移动到一个定义号的"初始位置。"
6.2 启动C-887
要求
- 你已经阅读并且理解了有关启动的一般注意。
- C-887已经正确地安装了。
启动C-887
- 设置C-887面板上波动开关为|位置。
C-887启动操作系统和固件。启动过程持续约40秒;有一个信号音表示开始和结束。在启动过程结束后,PWR和STA LEDs亮起。
在启动过程中,C-887仅限以下操作,以及其它:
- 对于hexapod运动平台的轴,启动伺服模式。
- 激活存储在非易失内存中的设置。
- 如果可用,运行启动宏。
6.3 通过TCP/IP接口建立通信
接口参数的修改
在通信建立前,需要一次修改接口参数的工厂设置。用IFS命令可以修改非易失内存中用于TCP/IP通信的以下接口参数:
|----------------------|---------------------|--------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------|
| 接口参数 | 工厂设置 | 注意 |
| 默认IP地址 (IPADR) | 192.168.1.28:50000 | 允许定义静态(固定)地址。当IP地址分配是通过DHCP服务器或者AutoIP(配置IP地址的启动行为的默认设置)配置C-887时,不使用这个静态地址。 如果要使用这个静态地址: 1. 启动行为必须被更改,使得C-887使用用"IPADR"定义的IP地址。 2. C-887和PC以及所有其它网络设备的IP地址和子网掩码必须相互兼容。 详细,见"准备PC和C-887使用静态IP地址"。 |
| 为TCP/IP通信配置IP地址的启动行为 | DHCP或AutoIP用作获取IP地址 | C-887的IP地址是通过DHCP或使用启动行为的默认设置的AutoIP被自动配置的。如果网络设备要使用静态地址,启动行为的默认设置才需要被更改。 |
| 子网掩码 (IPMASK) | 255.255.255.0 | 如果网络设备要使用静态地址,子网掩码的默认上设置必须被修改。 详见"为使静态IP地址准备PC和C-887" |
在启动或重启C-887后
在C-887和PC之间通信被建立前,C-887的启动过程必须结束。启动过程大约需要40秒(第二次信号音表示结束)。
当C-887的IP地址通过HDCP分配或者通过DHCP或用AutoIP配置网络设备的IP地址,它将在C-887启动结束后,通信通过TCP/IP可能,它将需要2分钟。
当启动控制器时,网络连接
如果在C-887启动时,网线连接C-887的RJ45插座,通过TCP/IP建立通信会失败。
- 如果通信建立失败,关闭C-887并且在网线插入时再次启动。
端口设置
要用GCS命令通信,C-887有一个不可更改的端口(50000)。
6.3.1 为使用静态IP地址准备PC和C-887
如果一个网络没有DHCP服务器,或者C-887直连PC上Ethernet插座并且要时使用静态IP地址,需要按如下修改接口参数:
- 设置用于配置C-887的IP地址的启动行为,使得使用静态地址。
- IP地址和C-887的子网掩码和PC以及所有其它网络地址必须相互兼容。
要修改IP地址和子网掩码,你可以选择以下两个选项之一:
- 修改PC设置,并且如果必要,网络设备的设置。保持C-887的设置不变。
- 修改C-887的设置。PC设置和其它网络设备保持不变。
要求
- 为了确定C-887的设置并且能够根据需要更改它们,你通过RS-232已经在C-887和PC之间建立了通信。
确定PC的IP地址和子网掩码
- 在PC上打开窗口,因而可以显示和设置TCP/IP属性。所需步骤取决于使用的操作系统。
如果你的操作系统区分IPv4和IPv6版本,打开对应版本4的窗口:

图5:有示例设置的"因特网协议(TCP/IP)属性"窗口(不一定适合你的系统)
这个图展示了不一定适合你系统的示例设置。
- 编写设置。
确定IP地址和C-887的子网掩码,修改了C-887的启动行为。
- 如果你在C-887和PC之间通过RS-232接口建立通信,打开窗口在使用的程序中输入命令。
- 输入IFS?命令。
这个命令获取在非易失内存中接口参数的值。
- 填写设置IPMASK和IPADR。
- 确定IPSTART被正确设置了:
- 如果IPSTART=0(使用用IPADR定义的静态IP地址),设置时正确的。
- 如果IPSTART!=0:发送命令IFS 100 IPSTART 0。
信息
在PIMikroMove中,你可以确定C-887的IP地址和子网掩码,并且在Configure Interface窗口中修改C-887的启动行为,而不需要发送命令。
修改PC的IP设置
- 如果你想要不修改PC设置,继续"修改C-887设置"的部分。
- 在显示和设置TCP/IP(TCP/IPv4)的属性的窗口中,激活Use following IP address。
- 修改C-887设置的IP地址和子网掩码。
- 复制C-887 IP地址前三段到PC。
- 确定PC上IP地址的末段不同于来自C-887 IP地址的末段,并且不为"255"或"0"。
- 复制C-887的子网掩码到PC的子网掩码。
示例:PC的新IP地址:192.168.1.29(如果C-887有IP地址192.168.1.28)
PC的新子网掩码:255.255.255.0(如果C-887的子网掩码255.255.255.0)
- 用OK按钮确认设置。
- 如果必须修改其它网络设备:按先前步骤修改IP地址和子网掩码。分配一个独立的,位移的IP地址给每个网络设备。IP地址在相同网络内不能出现两次。
- 关闭通过RS-232接口的连接,例如,在PIMikroMove中通过主窗口中Connections->Close->C-887菜单项。
- 关闭C-887
- 继续章节"在PC软件中通过TCP/IP建立通信"。
修改C-887设置
- 用IFS命令修改C-887的设置为PC的那些设置:
- 用IFS 100 IPMASK xxx.xxx.xxx.xxx命令更改子网掩码,此处xxx.xxx.xxx.xxx是PC的子网掩码。
- 用IFS 100 IPADR xxx.xxx.xxx.yyy:50000命令修改IP地址,此处以下应用:
- Xxx.xxx.xxx匹配PC的IP地址的前三段。
- Yyy区别相同网络中PC的IP地址以及所有其它设备的末段。
- Yyy不是"255",不是"0",并且是子网掩码末段指定的地址范围。
- 一定不能更改端口地址"50000"。
示例:如果PC的IP地址是192.168.0.1并且所有其它设备IP地址都不为192.168.0.2,发送IFS 100 IPADR 192.168.0.2:50000命令。
- 关闭通过RS-232接口的连接,例如,在PIMikroMove中通过主窗口中Connections->Close->C-887菜单项。
- 关闭C-887。
- 继续"在PC软件中通过TCP/IP建立通信"。
6.3.2 在PC软件中通过TCP/IP建立通信
小心

由预计不到运动造成碰撞的风险
当在C-887和PC之间通过TCP/IP已经建立通信时,PC软件提供了在相同网络中存在的所有控制器用于选择。在选择一个C-887连接后,所有命令被发送给这个控制器。如果选择了错误的控制器,会发出hexapod无法预计的运动的指令并且对操作和维护人员造成轻伤。
- 如果在PC软件中显示了若干C-887,确定你选择了正确的C-887。
- 为在相同网络中每个C-887分配一个唯一名称词缀:以Customer Device Name参数(ID 0x0D001000)的值输入名称词缀。
信息
在相同网络中找到的控制列表中,C-887不显示为C-887而是以HEXPOD或F-HEX,后跟C-887的9数字序列号。
为了在相同网络中或相同PC上在若干C-887之间做区分,可以为C-887分配一个任意选择的名称词缀。分配名称词缀的操作如下:
- 通过一个可用接口,建立通信。
- 通过发送以下切换命令级别:CCL 1 adanced
- 通过发送以下输入一个唯一名称词缀作为Customer Device Name参数(ID 0x0D001000)的值:SPA 1 0x0D001000 name affix
- 通过发送以下保存新参数到非易失内存:WPA 101 1 0x0D00100。
- 关闭连接。
备选:
- 根据C-887的序列号,识别在列表中找到的要被连接的C-887。控制器的序列号位于C-887后面板的铭牌上。
要求
- 你已经阅读并且理解有关启动的一般注意。
- C-887通过RJ45插座连接网络或者直连PC。
- 如果C-887连接网络:用于与C-887通信的PC连接了与C-887相同的网络。
- 如果网络没有DHCP服务器或者如果C-887直连了PC上以太网连接插座并且使用静态IP地址:通过修改接口参数,你为配置C-887的IP地址设置正确的启动行为并且修改了C-887以及所有其它相互之间的网络设备的IP地址和子网掩码。
- 如果若干C-887通过它们的TCP/IP接口连接了相同网络:为了建立通信,通过Customer Device Name参数(ID 0x0D001000)为C-887分配了唯一的名称词缀。另外,你已经由了这个C-887的序列号。序列号位于C-887后面板的铭牌上。
- 启动PC。
- 在PC上安装了所需软件。
- 你已经阅读并且理解PC软件手册。对软件手册的链接是在PI软件CD上A000T0081文件中。
- 关闭C-887。
通过TCP/IP建立通信
在下面描述了PIMikroMove的操作。对应其它PC软件程序的操作类似(例如,PITerminal, 与NI LabVIEW软件一起使用的驱动程序)。
1、启动C-887。
当网络设备的IP地址是用AutoIP配置时,在C-887启动过程结束后到通信通过TCP/IP可能时,大约需要2分钟。在启动PIMikroMove或者来自PI的其它PC软件前,等待直到AutoIP配置结束。
2、启动PIMikroMove。
Start up controller窗口打开了Connect controller步骤。
如果Start up controller窗口不自动打开,选择主窗口中Connections->New...菜单项。
3、在控制器选择字段中选择C-887。
4、选择窗口右边的TCP/IP。
显示了在相同网络中所有控制器。
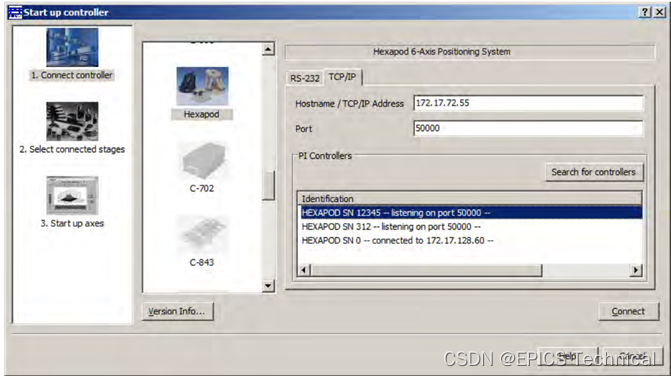
- 在找到的控制器列表(SN代表序列号)中点击HEXAPOD SN...或F-HEX SN...项。
- C-887在与PC不同子网中。用相应的网络配置,如果你直到C-887的当前IP地址,你仍然可以建立通信。在Hostname/TCP/IP Address字段中输入这个IP地址。
- 检查网络设置。如果需要,咨询你的网络管理员。
- 检查Hostname/TCP/IP Address字段中IP地址和Port字段中端口号。
- 点击Connect按钮建立通信。
当通过被成功建立时,Start up Controller窗口变成了Start up axes步骤。
6.4 通过RS-232接口建立通信
6.4.1 更改波特率
RS-232通信的接口参数在工厂时设置,如下表。在非易失性内存中的值可以用IFS?命令查询。
|------------------------|---------|---------------------------------------------------------------------------------|
| 接口参数 | 工厂设置 | 注释 |
| RS-232通信的接口 (RSPORT) | 1 | 写保护 表示用于RS-232通信的C-887端口 |
| 对应RS-232通信的握手 (RSHSHK) | RTS/CTS | 写保护 表示用于RS-232通信的C-887的握手设置 |
| 波特率 (RSBAUD) | 115200 | 表示用于RS-232通信的C-887的波特率 可能值时9600, 19200, 38400,57600。 要成功地建立通信,C-887的波特率和PC必须匹配。 |
在建立通信前,可能需要更改C-887的工厂波特率。
要求
- 你通过可用接口之一在C-887和PC之间建立通信。
更改RS-232通信的波特率
- 打开在使用程序中输入命令的窗口。
- 设置IFS 100 RSBAUD xxxxx命令,此处xxxxxx时新波特率。波特率设置在非易失内存中更改,并且在重启C-887后才生效。
6.4.2 在PC软件中通过RS-232建立通信
要求
- 你已经阅读并且理解了有关启动的一般注意。
- C-887连接了PC的RS-232接口。
- 启动C-887并且C-887的启动过程已经结束。
- 启动PC。
- 在PC上安装所需软件。
- 你已经阅读并且理解PC软件手册。软件手册的链接时在PI软件CD上A000T0081文件中。
通过RS-232建立通信
在以下描述了PIMikroMove的操作。对应其它PC软件程序的操作类似(PITerminal, 与NI LabView软件一起使用的驱动程序)。
1、启动PIMikroMove。Start up controller窗口打开Connect controller步骤。
如果Start up controller窗口没有自动打开,选择主窗口中Connections->New...菜单项。
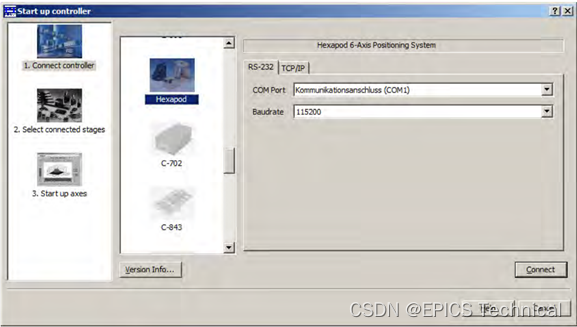
2、在控制器选择字段选择C-887
3、在窗口的右手边选择RS-232选项卡。
4、在COM Port字段,选择你已经连接了C-887的PC的COM端口。
5、在Baud rate字段,设置值115200(C-887发货时默认设置)
这修改PC的波特率为C-887的波特率。
如果你更改了C-887的波特率,你必须在Baud rate字段中输入这个新值。
6、点击Connect建立通信。
当通信已经成功建立时,Start up controller窗口变为了Start up axes步骤。
6.5 启动运动
在以下,PIMikroMove用于移动轴。
要求:
- 你已经阅读并且理解了启动的一般注意。
- 在PC安装了PIMikroMove。
- 你已经阅读并且理解PIMikroMove手册额。软件手册的链接在PI software CD上A000T0081文件中。
- 你已经阅读并且理解所有连接的定位器的用户手册(hexapod, 轴A和B)。
- 你根据相应手册中说明安装了定位器并且C-887连接了它们。
- 你已经通过TCP/IP接口或RS-232接口在C-887和PC之间建立了通信。
用PIMikroMove启动运动
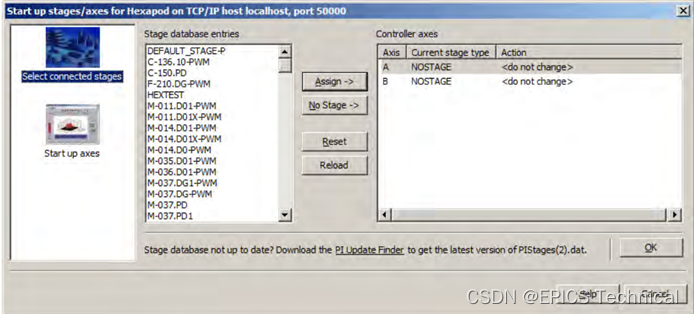
- 如果需要,分配匹配的定位器类型给轴A和B:
- 点击Start up controller窗口上2.Select connected stages切换到分配定位器类型的步骤。
- 在Controller axes列表中标记你想要分配一个定位器类型的轴。
- 在Stage database entries列表中标记定位器类型。
- 点击Assign。
- 如果需要,为第二个轴重复步骤b到d。
-
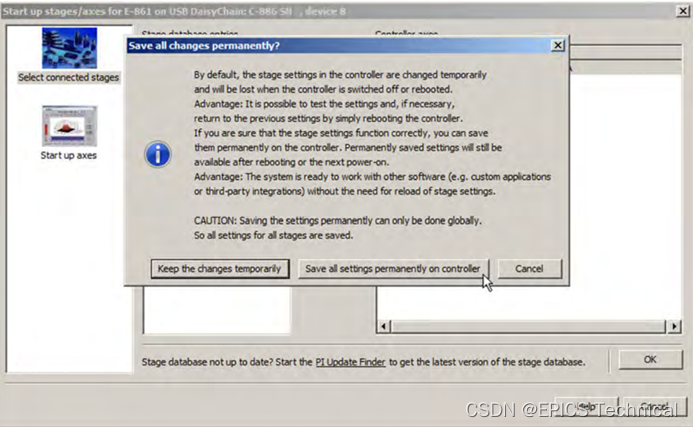
- 用OK确定选择,从定位器数据为所选定位器类型装载按时设置(详见"轴A和B的操作参数")。Save all changes permanently?对话框打开。
-
- 在Save all changes permanently?对话框,指定你想要如何装载参数设置:
- 以默认值装载(推荐):点击Save all settings permanently on controller来装载参数设置到非易失内存。在启动或者重启C-887后,这些设置立即可用,并且不需要被重新装载。
- 临时装载:点击Keep the changes temporarily装载这些参数设置到易失性内存。当关闭或重启C-887时,这些设置丢失。
- 在Save all changes permanently?对话框,指定你想要如何装载参数设置:
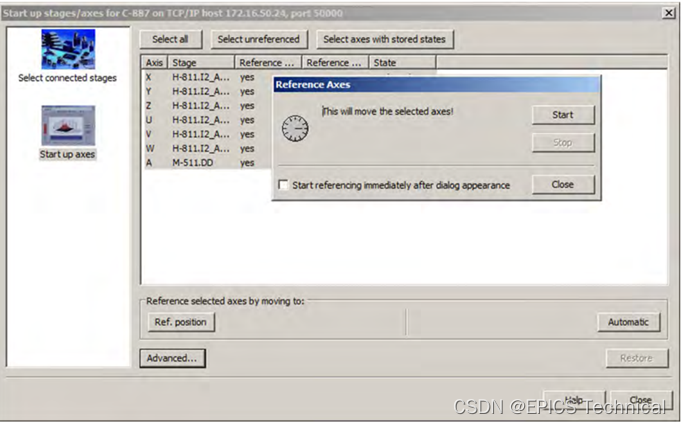
Start up controller窗口变成了Start up axes步骤。
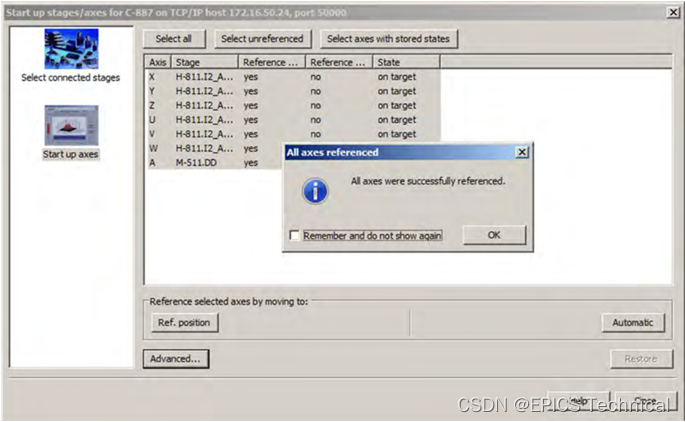
- 在Start up axes步对轴进行参考移动(安装增量传感器的轴必须)。要做这件事,点击Ref.position或Automatic。
- 在成功参考运动后点击OK>Close。
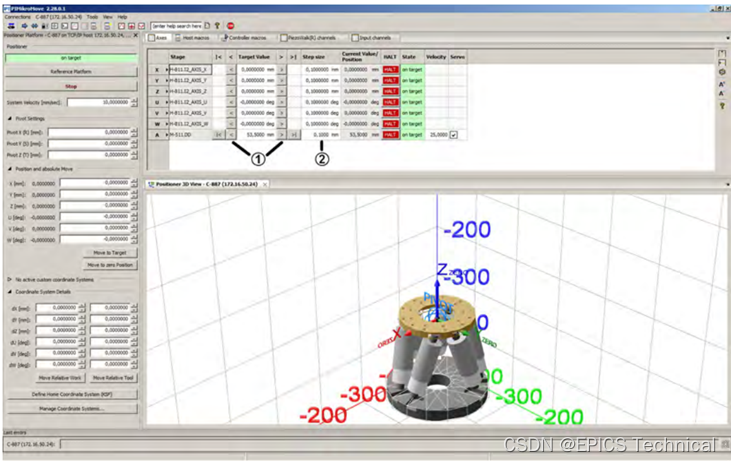
- 如果Positioner Platform窗口(左,停靠)和Positioner 3D View卡未在PIMikroMove的主窗口中显示:
- 用C-887>Show Positioner platform setting菜单项显示Positioner Platform窗口。
- 用C-887>Positioner 3D View>Show菜单项显示Positioner 3D View面板。
- 如果没有在前台显示Positioner 3D View卡,点击相应的标签。
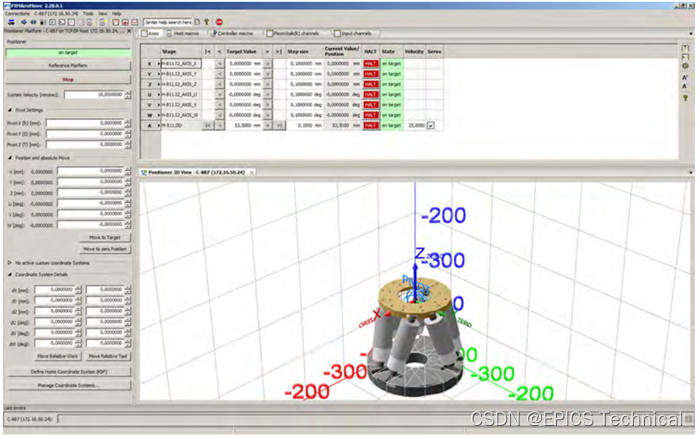
- 测试hexapod的运动平台的轴(X到W)的运动。
- 在Positioner Platform窗口的Position and absolute Move区域中,为hexapod运动平台的至少一个轴输入目标位置。
- 点击Move to Target启动向指定目标位置的运动。
- 当运动结束时,为新目标位置重复步骤a和b。
如果计算的动态轮廓的一个节点或者目标位置不能达到,运动将不被执行,并且窗口将出现一条错误小心。
在运动中,不能输入一个新目标位置。在Positioner 3D View面板上图形地显示运动。
6、在PIMikroMove的主窗口中Axis卡上启动测试轴A和B的运动。
-
- 如果需要,通过在Servo栏激活相应复选框,为轴A和B启动伺服模式。
- 启动测试运动:你可以例如,通过为一个轴点击相应箭头键(1)执行有特定步长地步骤(2)。