陀螺仪原理
A classic spinning gyroscope measures the rotation rate by utilizing the conservation of angular momentum.
经典旋转陀螺仪通过利用角动量守恒来测量旋转速率。
Coriolis Effect and Coriolis Force
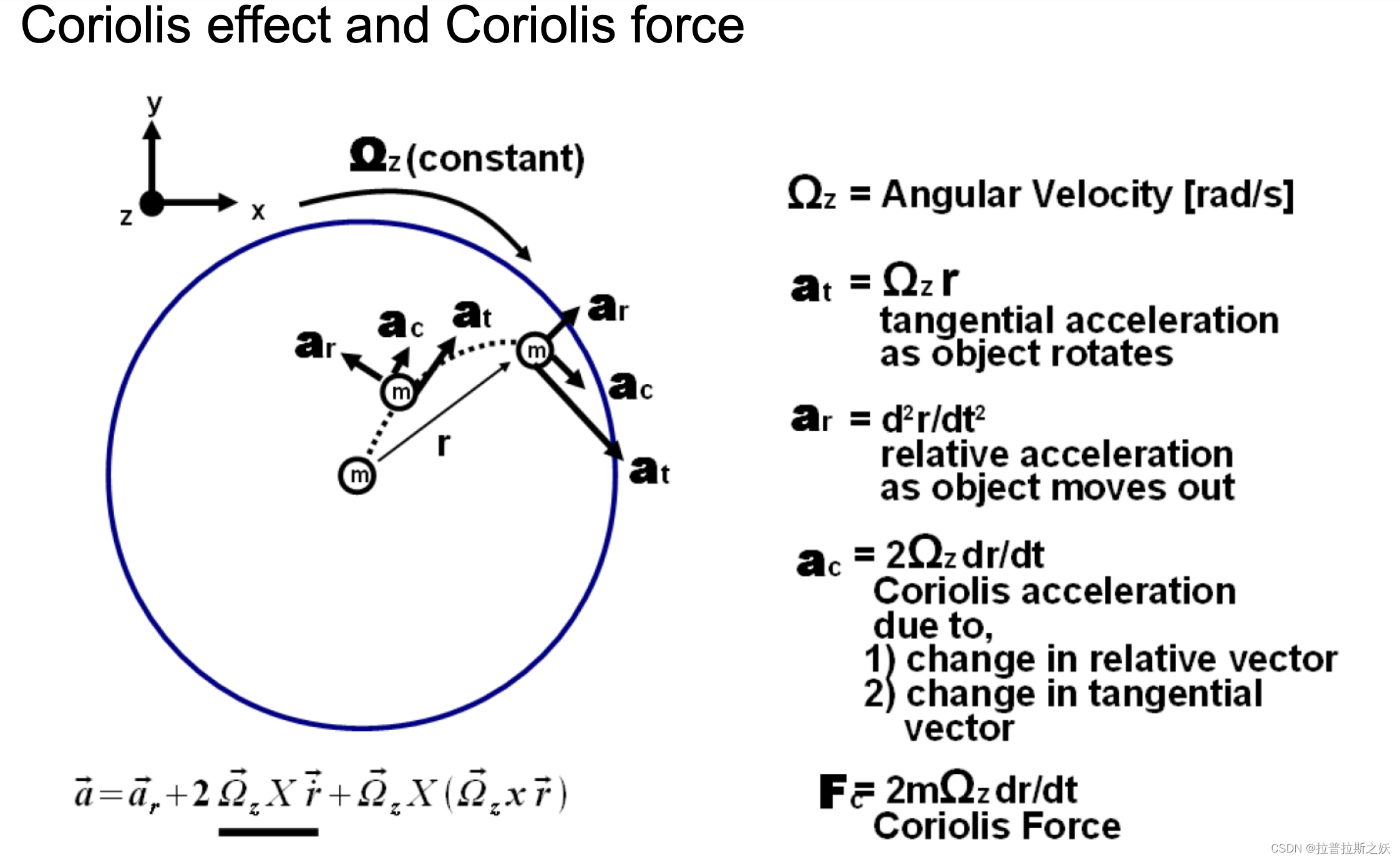
科里奥利效应是一种出现在旋转参考系 中的现象。它描述了当一个物体在旋转参考系中移动时,其运动方向会偏离预期的路径。
科里奥利效应源于旋转参考系中的惯性力 。当一个物体在旋转参考系中移动时,会感受到一个与其运动方向垂直的力,这就是科里奥利力。这个力的大小和方向由物体的速度、旋转体的角速度以及运动方向决定。
科里奥利力 F c F_c Fc 可以用以下公式计算:
F c = 2 m ( v × Ω ) F_c = 2m(\mathbf{v} \times \mathbf{\Omega}) Fc=2m(v×Ω)
其中:
- m m m 是物体的质量。
- v \mathbf{v} v 是物体在旋转参考系中的速度。
- Ω \mathbf{\Omega} Ω 是旋转参考系的角速度。
- × \times × 表示向量叉乘。
假设有一个旋转的圆盘,角速度为 Ω \Omega Ω,你站在圆盘的中心,并向外抛出一个小球。在你看来,小球应该沿直线飞出去。但由于圆盘在旋转,小球的路径会发生偏转,这种偏转就是由科里奥利效应引起的。
地球自西向东旋转,任何沿地球表面移动的物体都会受到科里奥利力的影响。在北半球,科里奥利力使运动物体向右偏转;在南半球,物体向左偏转。这种效应解释了为什么地球上的风和洋流会出现旋转的模式,例如北半球的气旋是逆时针方向旋转的,而南半球的气旋是顺时针方向旋转的。
- a \mathbf{a} a: 总加速度(Total acceleration)
- a r \mathbf{a}_r ar: 实际加速度(Actual acceleration),即物体在非旋转参考系中的加速度
- Ω z \mathbf{\Omega}_z Ωz: 角速度矢量(Angular velocity vector),指示参考系绕z轴旋转的速率
- r \mathbf{r} r: 位置矢量(Position vector),描述物体相对于旋转中心的位置
- r ˙ \mathbf{\dot{r}} r˙: 速度矢量(Velocity vector),物体在旋转参考系中的速度
-
实际加速度 a r \mathbf{a}_r ar:
- 这是物体在非旋转参考系中的实际加速度。它反映了物体由于各种力(例如重力、弹力等)作用而产生的加速度。
-
科里奥利加速度 2 ( Ω z × r ˙ ) 2(\mathbf{\Omega}_z \times \mathbf{\dot{r}}) 2(Ωz×r˙):
- 科里奥利加速度是由于物体在旋转参考系中运动而产生的附加加速度。它取决于角速度 Ω z \mathbf{\Omega}_z Ωz 和物体的速度 r ˙ \mathbf{\dot{r}} r˙。具体来说,科里奥利加速度方向垂直于物体的运动方向和旋转轴,大小与角速度和速度成正比。
- Ω z × r ˙ \mathbf{\Omega}_z \times \mathbf{\dot{r}} Ωz×r˙ 表示角速度矢量和速度矢量的叉乘。
-
离心加速度 ( Ω z × ( Ω z × r ) ) (\mathbf{\Omega}_z \times (\mathbf{\Omega}_z \times \mathbf{r})) (Ωz×(Ωz×r)):
- 离心加速度是由于参考系的旋转导致物体沿径向向外的加速度。它可以理解为物体在旋转参考系中感受到的一个向外的虚拟力。这个加速度取决于角速度 Ω z \mathbf{\Omega}_z Ωz 和位置矢量 r \mathbf{r} r。
- 公式中的双重叉乘 ( Ω z × ( Ω z × r ) ) (\mathbf{\Omega}_z \times (\mathbf{\Omega}_z \times \mathbf{r})) (Ωz×(Ωz×r)) 展示了离心力的方向和大小。
各种陀螺仪
Vibratory Gyroscopes
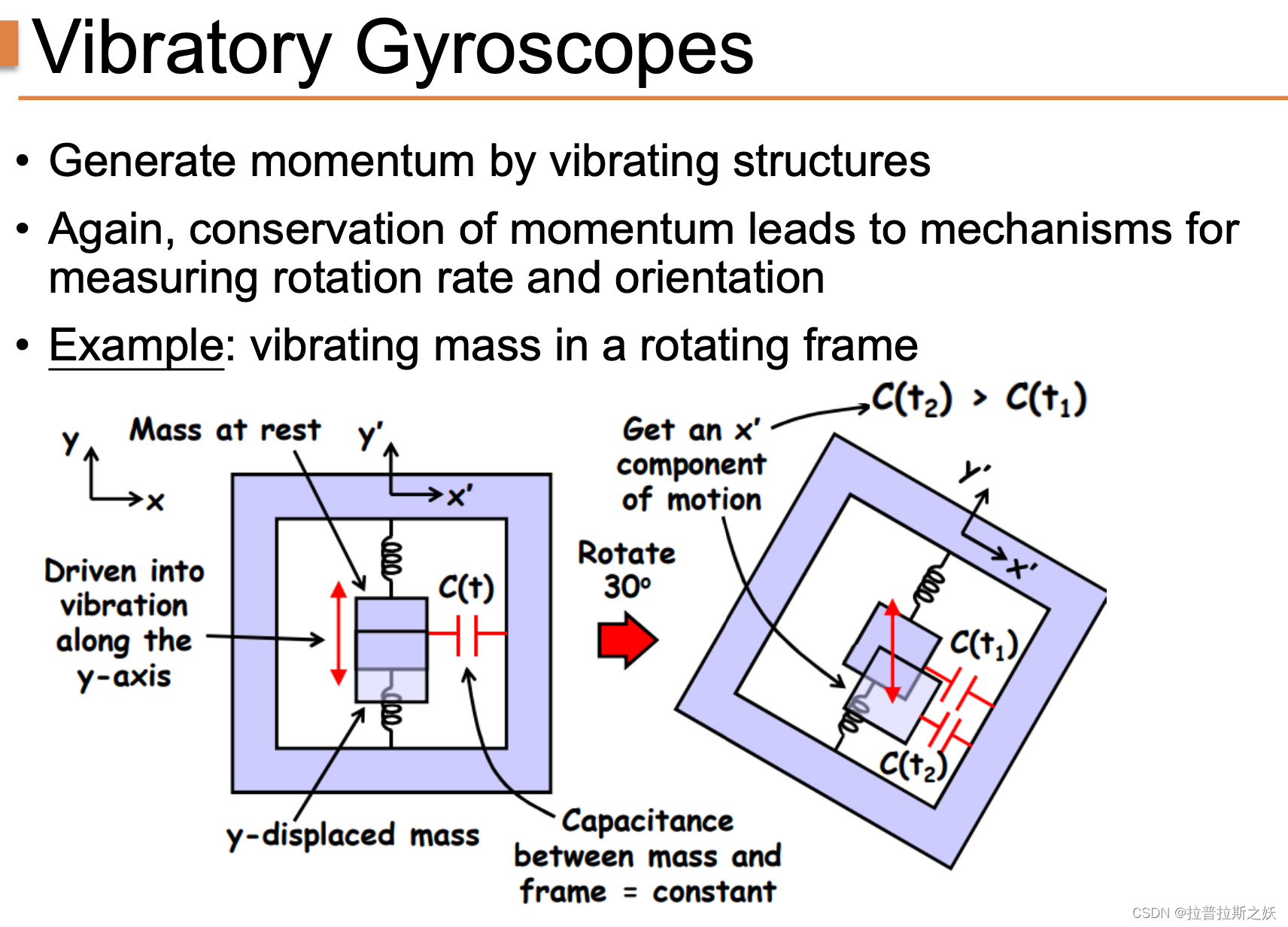
图示分为两部分,显示了静止时和旋转30度后的振动质量。以下是详细的解释:
-
静止状态的质量:
- 质量最初处于静止状态,并沿y轴方向振动。
- 振动由外部力引起,沿此轴上下移动质量。
- 这种运动由箭头表示,通常通过振荡电场或机械驱动来实现。
-
电容测量:
- 陀螺仪测量振动质量和框架之间的电容 C ( t ) C(t) C(t)。随着振动过程中质量和框架之间距离的变化,电容也会变化。
- 在静止状态下,每个振动周期内的电容是恒定的(记为 C ( t ) C(t) C(t))。
-
旋转和科里奥利效应:
- 当框架旋转(如旋转30度所示)时,振动质量会受到科里奥利力的作用。该力垂直于振动方向和旋转轴。
- 由于旋转,质量现在具有沿x'轴方向的运动分量,这是系统静止时不存在的。
-
旋转引起的电容变化:
- 旋转导致在不同时间测量的电容值变化(记为 C ( t 1 ) C(t_1) C(t1) 和 C ( t 2 ) C(t_2) C(t2))。
- 这些变化是因为科里奥利力使振动质量在x'方向上偏移,改变了质量和框架之间的距离。
-
旋转速率的检测:
- 通过监测电容的变化,陀螺仪可以检测到旋转速率和方向。由于科里奥利引起的位移导致不同时间的 C ( t ) C(t) C(t) 值差异,这些差异与框架的旋转速率直接相关。
振动陀螺仪通过检测旋转框架内质量振动模式的变化来工作。关键原理是科里奥利效应,当系统旋转时,这种效应会使振动质量产生垂直位移。这种位移影响测量的电容,从而使陀螺仪能够确定旋转速率和方向。
Tuning Fork Gyroscope
调谐叉式陀螺仪通过驱动叉齿振动并检测由于科里奥利力引起的垂直于振动方向的位移来测量旋转速率。其关键在于最大化科里奥利力和位移响应,从而提高旋转速率的检测灵敏度。通过优化感应轴质量、刚度以及驱动幅度,并匹配驱动频率和感应频率,可以显著增强输出信号,提高陀螺仪的性能。
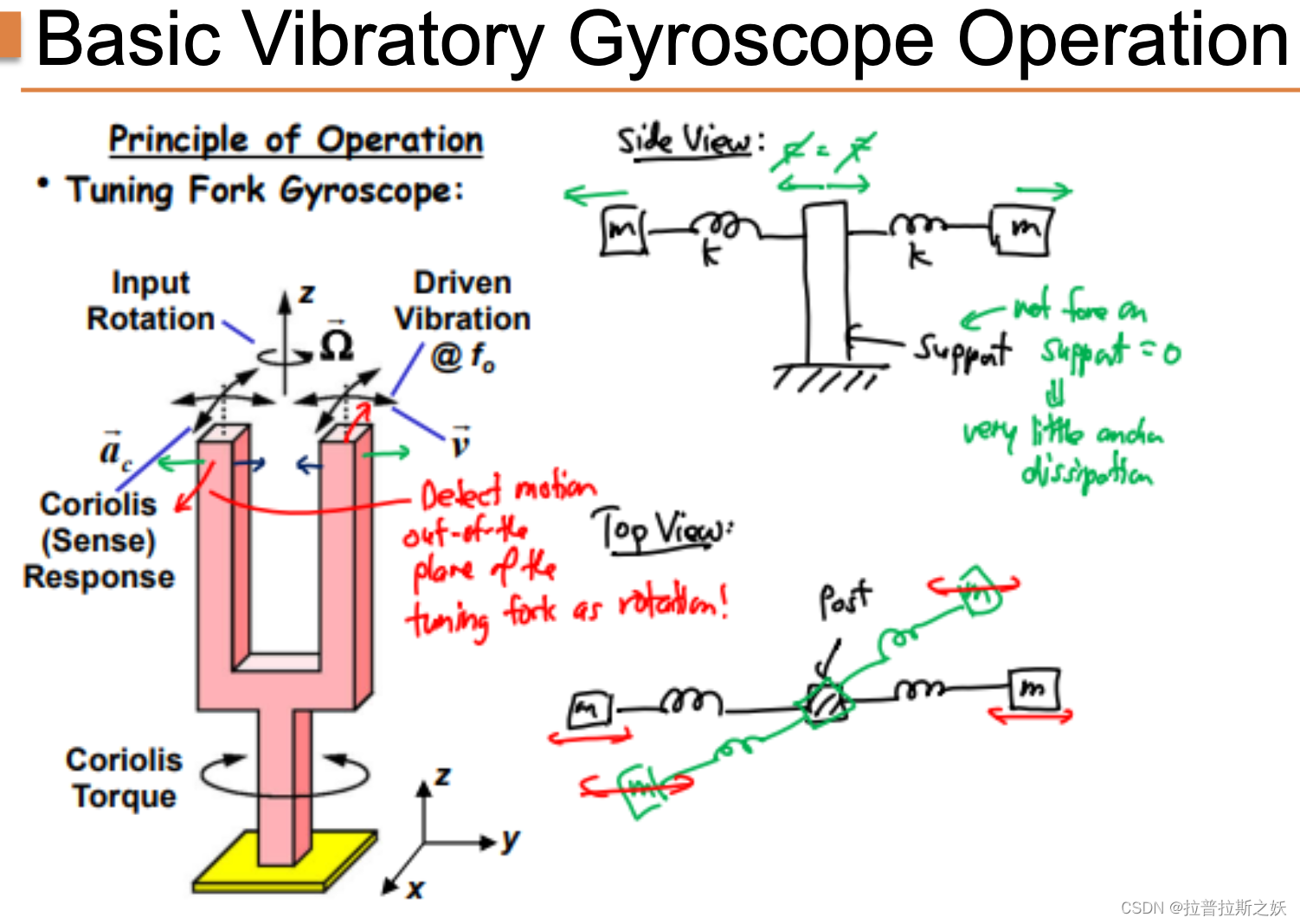
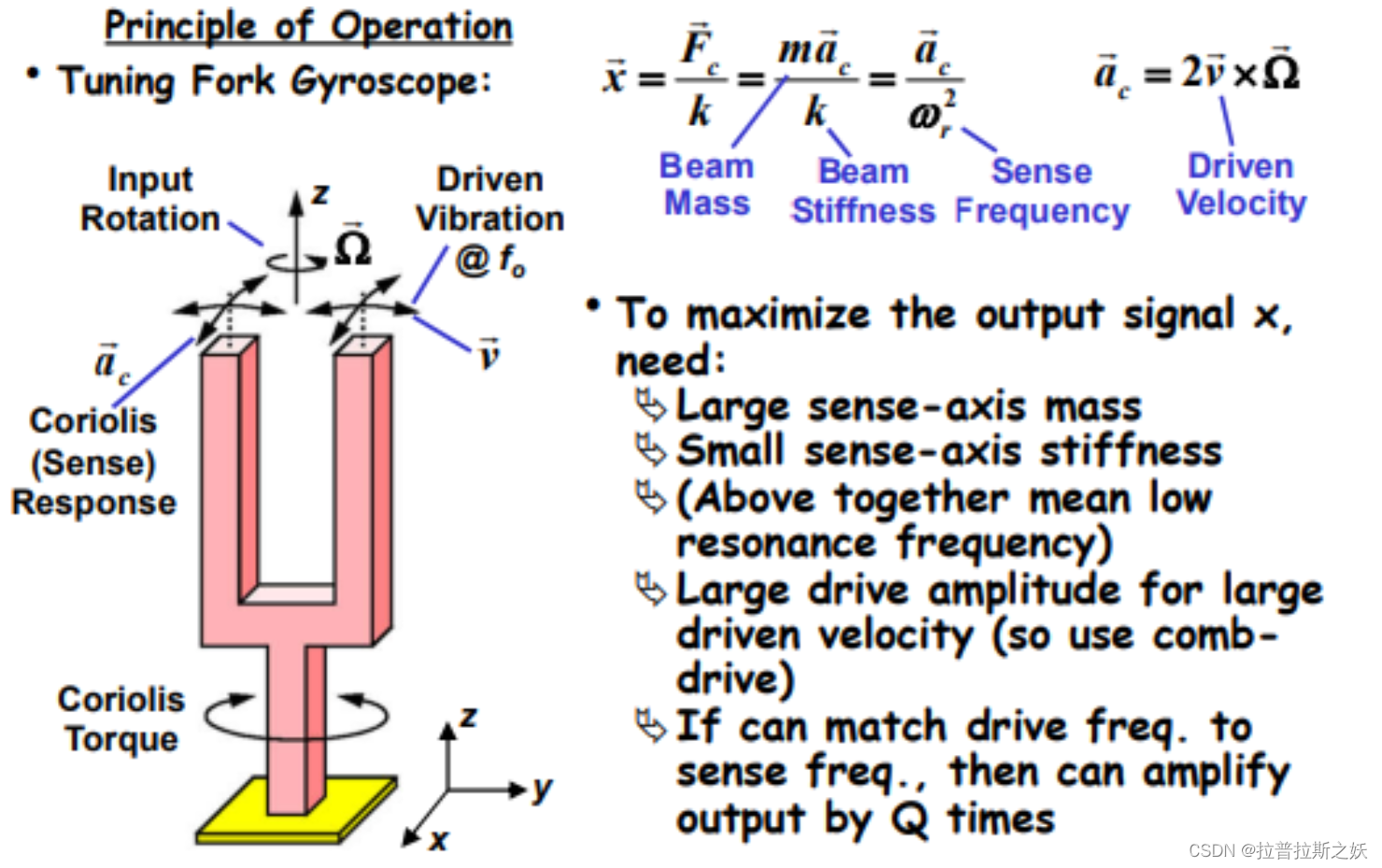
陀螺仪在z轴周围受到旋转输入 Ω \mathbf{\Omega} Ω 在特定轴(通常是y轴)以频率 f o f_o fo 驱动振动。
调谐叉的一侧在驱动频率( f o f_o fo)下振动,产生一个初始速度矢量( v \mathbf{v} v)。当整个结构受到旋转时,科里奥利力将使质量块在y轴方向上产生位移,这种位移被转换成电信号,从而测量旋转速率。
第一页图中的下部显示了科里奥利力产生的扭矩。这种扭矩是由叉齿的振动和输入旋转相互作用产生的,导致叉齿在垂直于振动平面的方向上运动。
数学原理:
输入旋转(Input Rotation)
图中的旋转矢量 Ω \Omega Ω表示陀螺仪受到的外部旋转运动,方向沿着z轴。
驱动振动(Driven Vibration)
驱动振动是在调谐叉的叉齿上施加的周期性振动。图中标示为 v \mathbf{v} v,表示叉齿的振动速度矢量,驱动频率为 f o f_o fo。振动方向沿着x轴。
科里奥利力和响应(Coriolis Force and Response)
当陀螺仪受到旋转时,科里奥利力将作用于振动的质量块上,使其在y轴方向上产生运动。这种运动的加速度 a c \mathbf{a}_c ac由下式表示:
a c = 2 ( v × Ω ) \mathbf{a}_c = 2 (\mathbf{v} \times \mathbf{\Omega}) ac=2(v×Ω)
这是科里奥利加速度,垂直于振动速度和旋转矢量方向。
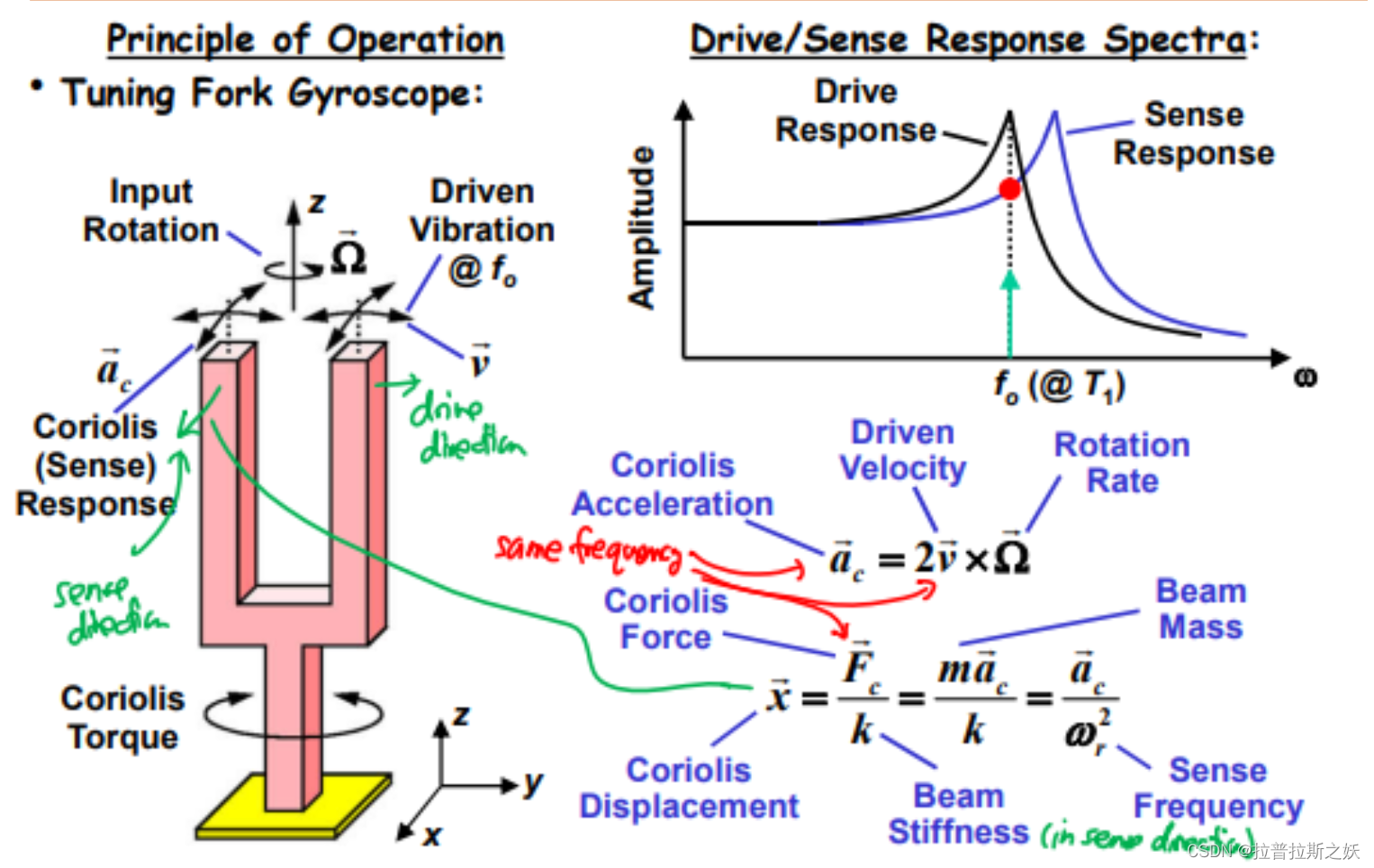
科里奥利力(Coriolis Force)
科里奥利力 F c \mathbf{F}_c Fc可以通过质量 m m m和科里奥利加速度 a c \mathbf{a}_c ac计算得到:
F c = m a c = 2 m ( v × Ω ) \mathbf{F}_c = m \mathbf{a}_c = 2 m (\mathbf{v} \times \mathbf{\Omega}) Fc=mac=2m(v×Ω)
- Ω \mathbf{\Omega} Ω 是沿z轴方向的旋转角速度矢量。
- v \mathbf{v} v 是叉齿沿x轴方向的振动速度矢量。
- 科里奥利力 Ω × v \mathbf{\Omega} \times \mathbf{v} Ω×v的方向是沿y轴。
科里奥利位移(Coriolis Displacement)
科里奥利力引起的位移 x \mathbf{x} x可以通过梁的刚度 k k k和科里奥利力 F c \mathbf{F}_c Fc计算:
x = F c k = m a c k = a c ω r 2 \mathbf{x} = \frac{\mathbf{F}_c}{k} = \frac{m \mathbf{a}_c}{k} = \frac{\mathbf{a}_c}{\omega_r^2} x=kFc=kmac=ωr2ac
其中, ω r \omega_r ωr是梁在感应方向上的自然频率。
驱动/感应响应频谱(Drive/Sense Response Spectra)
图中右侧展示了驱动和感应响应的频谱图。驱动响应和感应响应曲线分别用黑色和蓝色表示。频谱图展示了驱动频率和感应频率之间的关系,以及它们对振幅的影响。
- 驱动响应(Drive Response):随频率变化的振幅响应。
- 感应响应(Sense Response):在感应方向上随频率变化的响应。
频率匹配(Mode Matching)
在图中,可以看到驱动频率 f o f_o fo和感应频率 ω r \omega_r ωr相匹配,这样可以在旋转速率检测中获得更高的分辨率。图中用一个红点标示了频率匹配点,表明在这个频率下驱动和感应响应达到共振状态。
最大化输出信号
为了最大化输出信号 x \mathbf{x} x,需要考虑以下因素:
-
增大感应轴质量(Large sense-axis mass) :
增大叉齿在感应方向上的质量可以提高对科里奥利力的响应。
-
减小感应轴刚度(Small sense-axis stiffness) :
减小梁的刚度可以提高对位移的灵敏度,因为较低的刚度意味着在相同的力下会产生更大的位移。
-
低谐振频率(Low resonance frequency) :
增大质量和减小刚度共同作用,使系统的谐振频率降低。这使得在特定频率下系统更容易达到共振,从而提高灵敏度。
-
大驱动幅度(Large drive amplitude) :
为了产生较大的驱动速度 v \mathbf{v} v,需要较大的驱动幅度。这样可以使科里奥利力和加速度更显著,提高检测灵敏度。使用梳齿驱动(comb-drive)可以实现较大的驱动幅度。
-
频率匹配(Frequency Matching) :
如果可以将驱动频率与感应频率匹配(共振),则输出信号可以被放大Q倍。Q是品质因数(Quality Factor),表示系统在共振频率下的响应增强倍数。
MEMS-Based Gyroscopes
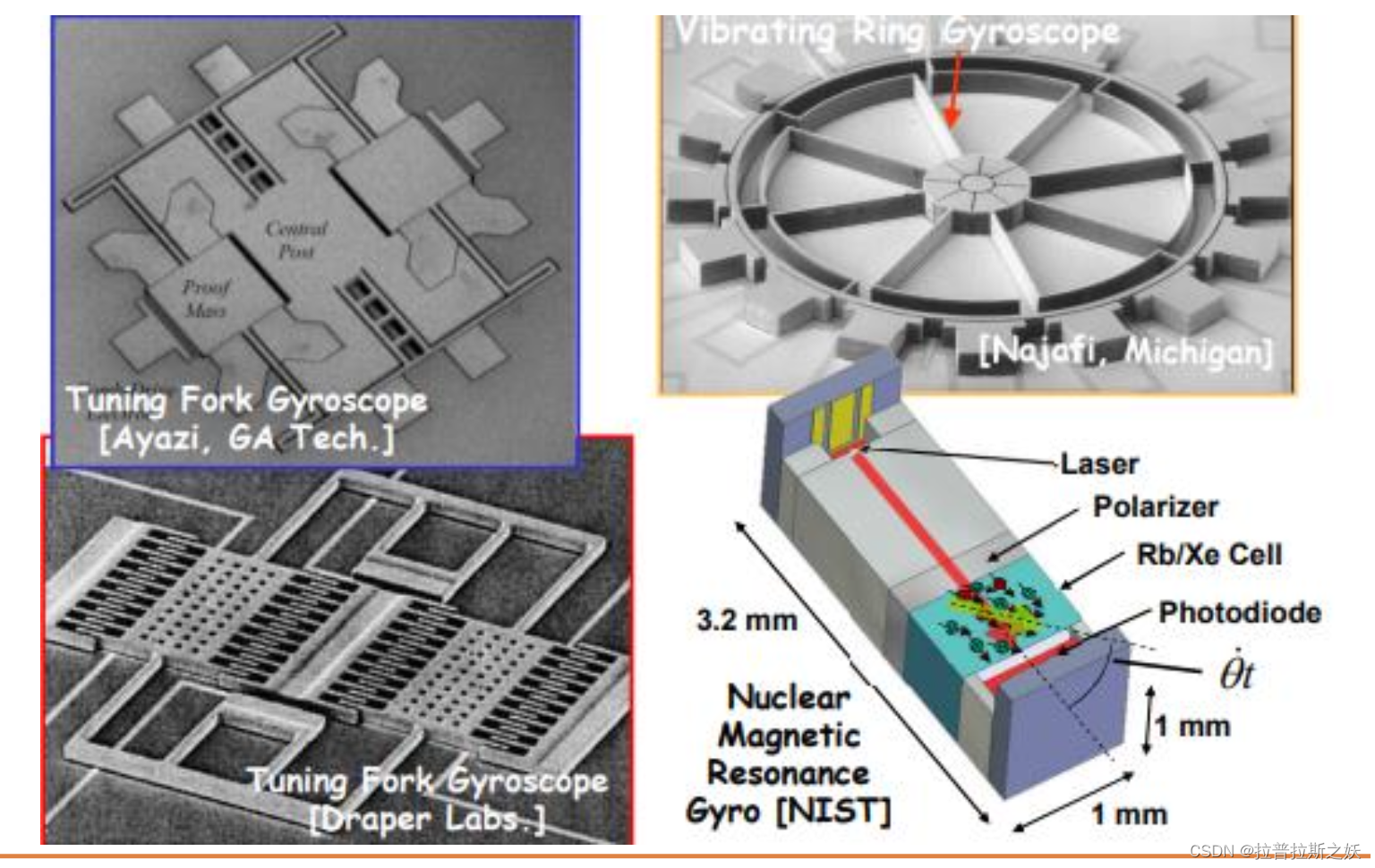
这张图展示了几种不同类型的基于MEMS技术的陀螺仪,包括调谐叉式陀螺仪、振动环陀螺仪和核磁共振陀螺仪。下面我们详细讲解每种陀螺仪的特点和工作原理。
调谐叉式陀螺仪(Tuning Fork Gyroscope)
图左上和左下
1. Ayazi, GA Tech
-
设计特点:
- 该陀螺仪使用一个中央柱和对称的质量块。
- 通过微加工技术制造,具有高对称性和较低的机械噪声。
- 中央柱和质量块的设计使其在感应方向和驱动方向上有较好的性能。
-
工作原理:
- 驱动质量块在x轴方向上振动,当受到z轴方向的旋转时,科里奥利力使质量块在y轴方向上移动。
- 检测到的y轴方向的位移可以用于计算旋转速率。
2. Draper Labs
-
设计特点:
- 这个版本的调谐叉式陀螺仪采用了多层结构,具有更高的集成度和小型化特点。
- 设计更加复杂,可能包含多对叉齿,以增强灵敏度和降低噪声。
-
工作原理:
- 与前述GA Tech的设计类似,驱动质量块在一个方向振动,通过检测科里奥利力引起的垂直位移来测量旋转速率。
振动环陀螺仪(Vibrating Ring Gyroscope)
图右上
Najafi, Michigan
-
设计特点:
- 振动环陀螺仪使用一个圆环作为主要结构,环形设计提供了高对称性和良好的抗扰性。
- 环形结构中,环的外缘通过电极驱动,使其在平面内振动。
-
工作原理:
- 当陀螺仪绕其中心轴旋转时,科里奥利力作用在振动的环上,使得环的振动模式发生变化。
- 通过检测振动模式的变化,可以计算旋转速率。
-
优点:
- 环形设计提供了高稳定性和高灵敏度。
- 振动环结构具有较好的机械强度和较低的机械噪声。
核磁共振陀螺仪(Nuclear Magnetic Resonance Gyro)
图右下
NIST(国家标准与技术研究所)
-
设计特点:
- 该陀螺仪结合了激光、偏振器和铷/氙细胞等高精密技术。
- 尺寸非常小(约3.2毫米长,1毫米宽),非常适合微型化应用。
-
工作原理:
- 使用激光通过偏振器照射铷/氙细胞,细胞内的原子在核磁共振效应下会对旋转产生响应。
- 旋转引起的变化通过光电二极管检测,转换为电信号,从而测量旋转速率。
-
优点:
- 高精度和高灵敏度。
- 由于核磁共振效应,对外界干扰有很强的抗扰性。
综合理解
基于MEMS技术的陀螺仪由于其小型化、低功耗和高灵敏度,广泛应用于导航、姿态控制和消费电子等领域。不同类型的MEMS陀螺仪各有其特点和优势:
- 调谐叉式陀螺仪:结构简单、易于制造,适合大规模生产和应用。
- 振动环陀螺仪:高对称性和稳定性,适合高精度应用。
- 核磁共振陀螺仪:超高精度和灵敏度,适用于对抗干扰能力要求极高的应用。
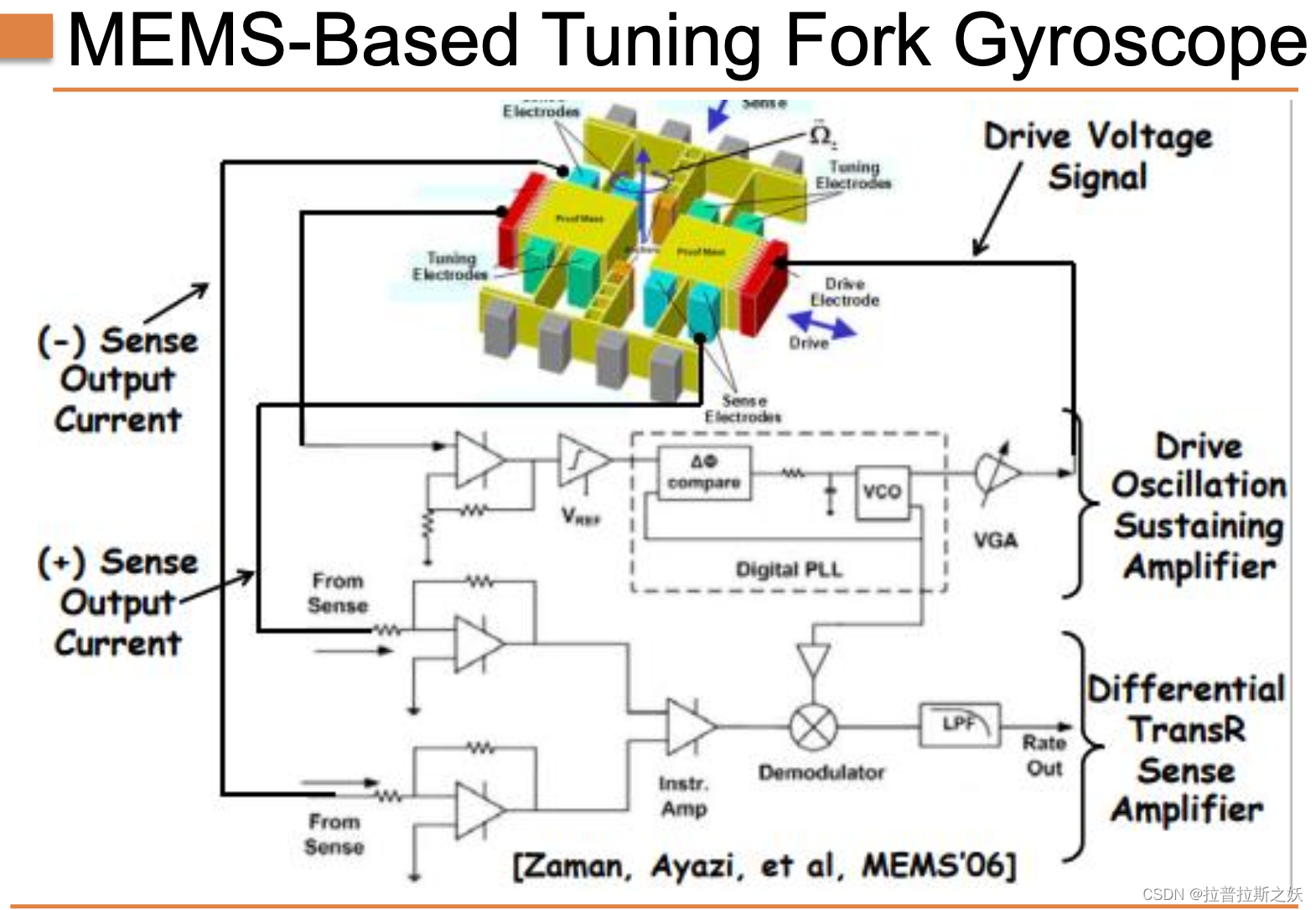
MEMS-Based Tuning Fork Gyroscope
结构组成
-
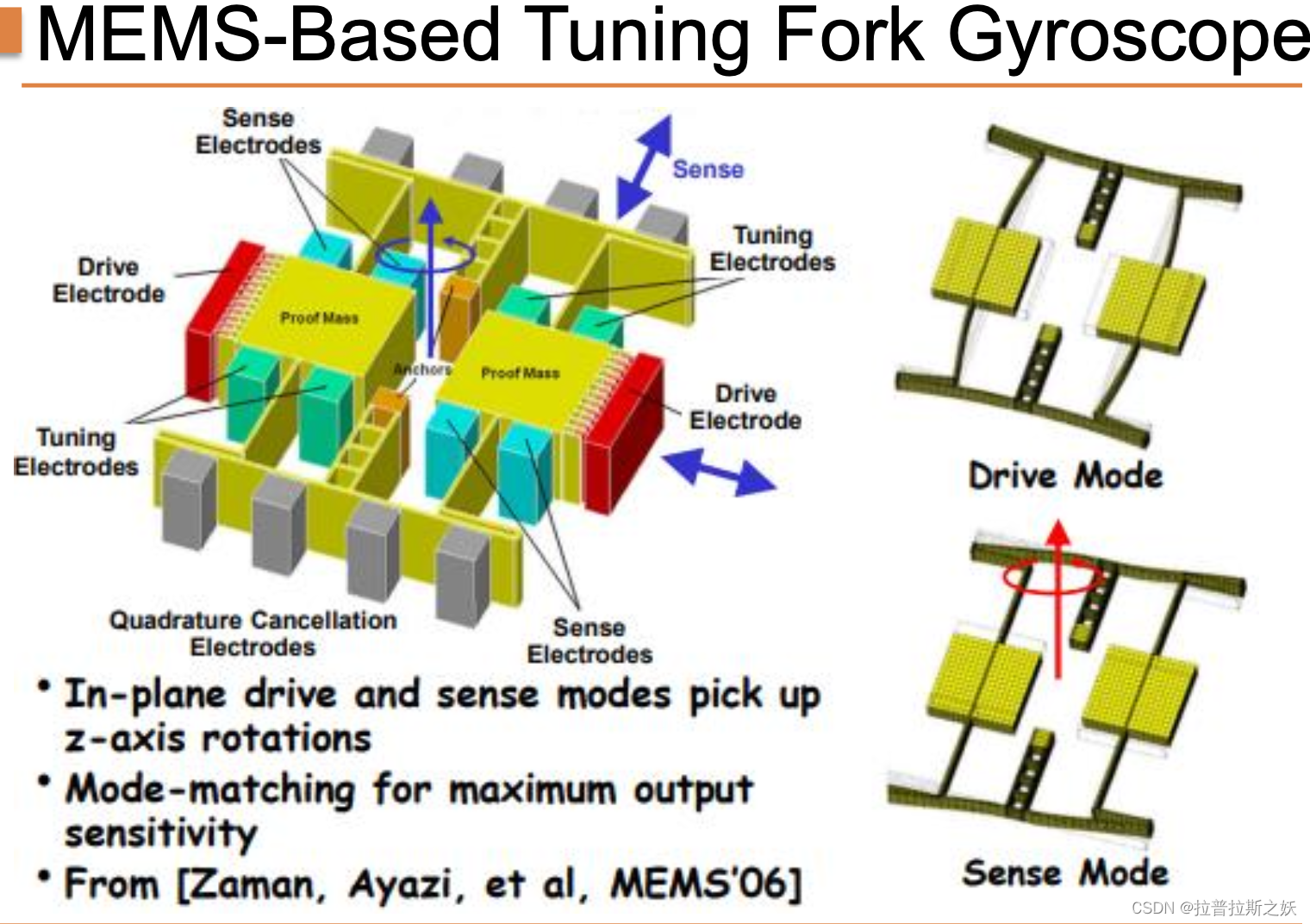
证明质量块(Proof Mass):
- 图中两个黄色的大块部分。
- 这些质量块是振动和感应的主要部分,通过驱动电极和感应电极与外部电路相连。
-
驱动电极(Drive Electrode):
- 标记为红色的部分。
- 通过施加交变电压,驱动证明质量块在平面内(通常是x轴方向)振动。
-
感应电极(Sense Electrode):
- 标记为蓝色的部分。
- 检测由于旋转引起的证明质量块在垂直于驱动方向(通常是y轴方向)的运动。
-
调谐电极(Tuning Electrode):
- 标记为绿色的部分。
- 用于调整系统的共振频率,以实现模式匹配(Mode Matching),提高灵敏度。
-
四极消除电极(Quadrature Cancellation Electrode):
- 用于消除由制造不对称或其他误差引起的四极误差信号,保证信号的准确性。
-
固定点(Anchors):
- 连接证明质量块与基底,用于支撑整个结构。
工作模式
图中右侧展示了陀螺仪的驱动模式和感应模式。
驱动模式(Drive Mode)
-
原理:
- 驱动电极施加交变电压,使证明质量块在x轴方向上振动。
- 这种振动是输入旋转(z轴方向)检测的基础。
-
效果:
- 使证明质量块在驱动方向上产生周期性运动,为科里奥利力的产生创造条件。
感应模式(Sense Mode)
-
原理:
- 当陀螺仪绕z轴旋转时,科里奥利力作用在振动的证明质量块上,导致其在y轴方向上移动。
- 感应电极检测这种垂直于驱动方向的运动,转化为电信号。
-
效果:
- 通过检测y轴方向的位移,可以计算旋转速率。
关键技术和优势
平面内驱动和感应模式(In-plane drive and sense modes)
- 特点 :
- 驱动和感应模式都在平面内进行,这使得结构设计更加紧凑。
- 这种设计可以有效地检测z轴方向的旋转。
模式匹配(Mode Matching)
-
原理:
- 通过调谐电极调整系统的共振频率,使驱动频率与感应频率匹配。
- 在共振状态下,系统的灵敏度最高,可以显著放大检测信号。
-
优势:
- 提高了陀螺仪的灵敏度和信号强度。
- 通过精确的模式匹配,可以减小噪声,增加信号的准确性。
电路部分
基于MEMS的调谐叉式陀螺仪通过复杂的电路设计实现高精度的旋转速率检测。驱动电路维持证明质量块的持续振动,感应电路检测由于科里奥利效应引起的质量块运动,并通过一系列信号处理电路提取出旋转速率信息。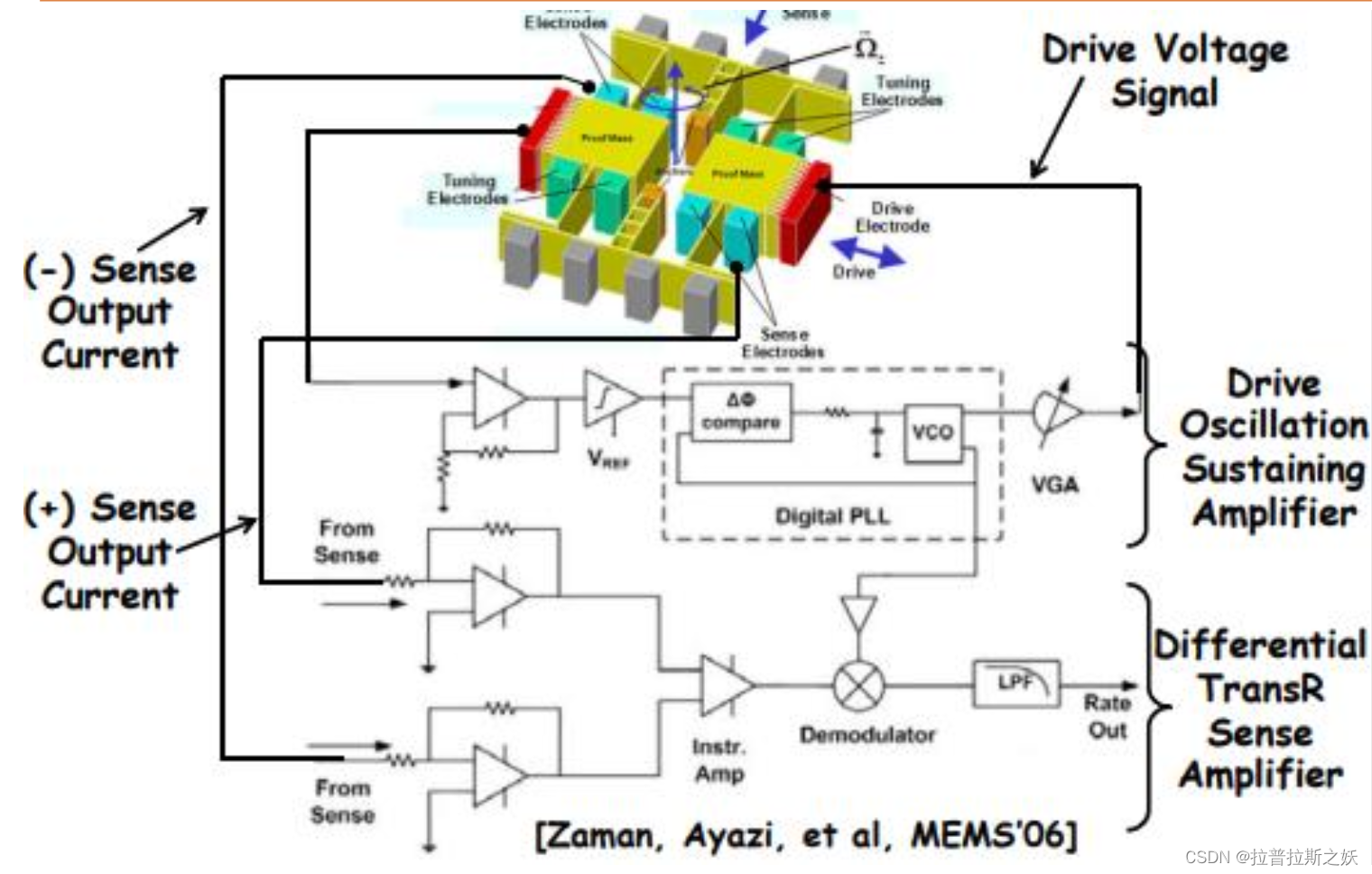
驱动振荡维持放大器(Drive Oscillation Sustaining Amplifier)
这部分电路用于维持驱动振荡信号,使得证明质量块持续振动。
-
驱动电压信号(Drive Voltage Signal):
- 输入到驱动电极,驱动证明质量块在平面内振动。
-
电压控制振荡器(Voltage-Controlled Oscillator, VCO):
- 位于数字锁相环(Digital PLL)内部。
- 通过调节频率来维持驱动信号的稳定。
-
增益控制放大器(Variable Gain Amplifier, VGA):
- 调节驱动信号的幅度,以维持恒定的振动幅度。
差分感应放大器(Differential TransR Sense Amplifier)
这部分电路用于检测感应信号并进行放大和处理。
-
感应输出电流(Sense Output Current):
- 感应电极检测到由于科里奥利效应引起的质量块运动,产生感应电流。
-
仪表放大器(Instrumentation Amplifier):
- 放大感应电极输出的微弱电流信号,增强信号强度。
-
解调器(Demodulator):
- 将放大后的信号进行解调,提取出有用的旋转速率信息。
-
低通滤波器(Low-Pass Filter, LPF):
- 过滤掉高频噪声,仅保留旋转速率的低频成分。
-
速率输出(Rate Out):
- 最终输出处理后的旋转速率信号,供后续使用。
数字锁相环(Digital Phase-Locked Loop, PLL)
数字锁相环用于精确控制振荡频率,以确保驱动信号的稳定性。
-
Δφ比较器(Δφ Compare):
- 比较输入信号和参考信号之间的相位差,调节VCO的输出频率。
-
VCO(Voltage-Controlled Oscillator):
- 根据Δφ比较器的输出,调整振荡频率以保持锁相环的稳定。
在基于MEMS的调谐叉式陀螺仪中,通过模式匹配可以显著提高分辨率和信号灵敏度。频率匹配能够最大化共振状态下的输出信号,同时需要注意频率漂移的问题。通过匹配驱动轴和感应轴的温度系数,并使用调谐电极实现精确的频率匹配,可以有效抑制频率漂移引起的偏置漂移,确保陀螺仪在不同温度下的高精度和稳定性。
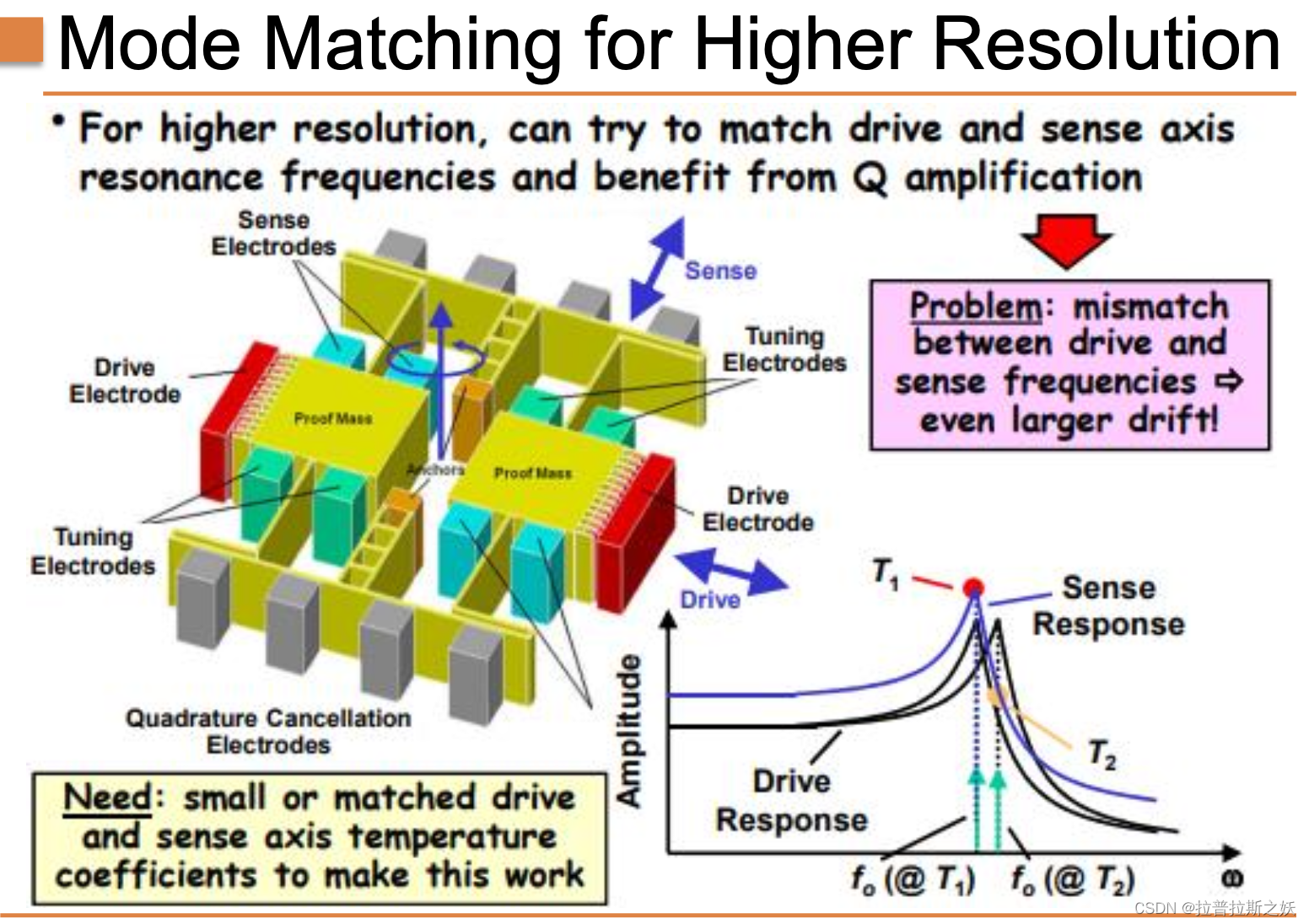
频谱响应
图右侧展示了驱动和感应响应的频谱图,说明了不同温度下频率漂移对系统响应的影响。
-
驱动响应(Drive Response):
- 黑色曲线表示在不同温度下的驱动响应。
- 随着温度变化(从(T_1)到(T_2)),驱动频率可能会发生偏移。
-
感应响应(Sense Response):
- 蓝色曲线表示感应响应。
- 频率变化会导致感应响应的频率漂移,影响检测精度。
-
频率匹配点(Frequency Matching Point):
- 红点和橙点分别表示在不同温度下的频率匹配点。
- 确保驱动频率和感应频率在各个温度下匹配,可以提高系统的稳定性和灵敏度。
模式匹配的重要性
原理
-
模式匹配(Mode Matching):
- 通过调整系统的共振频率,使驱动频率和感应频率相匹配,在共振状态下,系统的灵敏度最高,输出信号的强度最大。
- 这种方法能够有效地放大Q因子(品质因数),提高信号的分辨率。
-
共振频率(Resonance Frequency):
- 共振频率是系统在自然频率下振动的频率。
- 驱动频率和感应频率的匹配能够确保系统在共振频率下工作,从而最大化输出信号。
频率匹配的好处
-
提高灵敏度:
- 在共振状态下,系统的响应幅度最大,能够显著提高信号的灵敏度和检测精度。
-
放大Q因子:
- 共振状态能够放大Q因子,使得信号在检测过程中能够得到显著增强。
零速偏置误差的来源
在基于MEMS的调谐叉式陀螺仪中,系统的不平衡会导致零速偏置误差。这种误差主要来自驱动不平衡和质量不平衡引起的离轴运动和四极信号。通过使用四极消除电极和匹配温度系数,可以有效地消除这些误差信号,确保陀螺仪的输出信号准确、稳定。
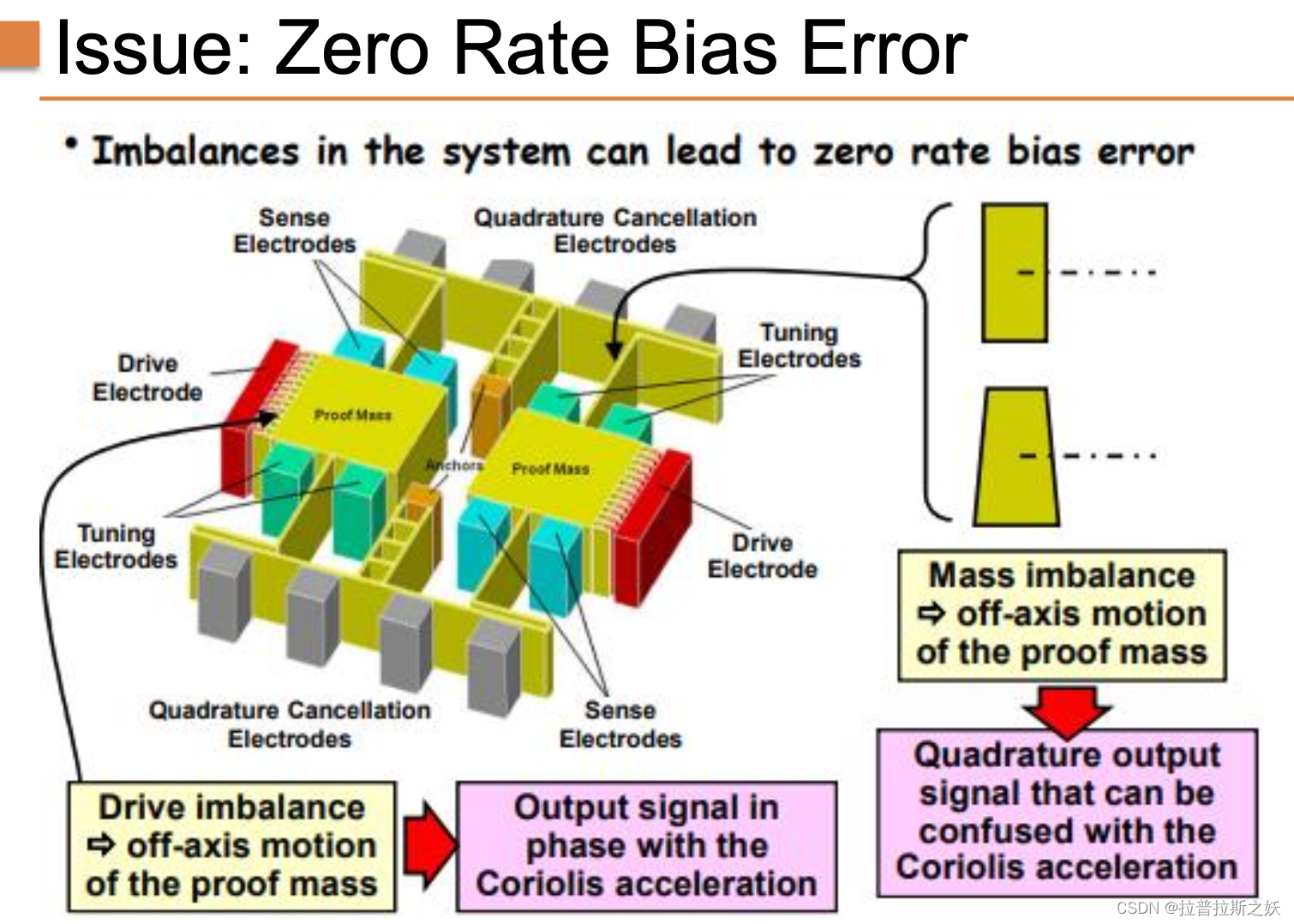
驱动不平衡(Drive Imbalance)
-
描述:
- 驱动不平衡会导致证明质量块产生离轴运动。
- 这种运动并不垂直于驱动方向,而是沿其他方向发生,导致误差信号。
-
影响:
- 离轴运动会在感应电极上产生与科里奥利加速度相位一致的输出信号。
- 这种信号会被误认为是有效的科里奥利信号,从而引入误差。
质量不平衡(Mass Imbalance)
-
描述:
- 质量不平衡也会导致证明质量块产生离轴运动。
- 这种运动同样不在预期的检测方向上,导致信号误差。
-
影响:
- 质量不平衡引起的离轴运动会产生一个可以与科里奥利加速度相混淆的四极输出信号。
- 这种误差信号会干扰实际的旋转速率检测,导致偏置漂移。
解决方案
四极消除电极(Quadrature Cancellation Electrodes)
-
作用:
- 用于消除由于驱动不平衡和质量不平衡引起的四极误差信号。
- 通过精确的电路设计和调节,可以将这些误差信号最小化。
-
原理:
- 四极消除电极可以通过检测和抵消不平衡引起的信号来消除误差。
- 这种方法能够显著提高陀螺仪的信号准确性和稳定性。
匹配温度系数(Matched Temperature Coefficients)
- 需求 :
- 需要确保驱动轴和感应轴的温度系数小且匹配,以抑制由于温度变化引起的不平衡。
信号处理
图右侧展示了由于驱动不平衡和质量不平衡引起的信号路径和影响:
-
离轴运动的输出信号:
- 红色箭头表示离轴运动引起的输出信号,该信号与科里奥利加速度相位一致。
-
四极输出信号:
- 橙色箭头表示质量不平衡引起的四极输出信号,该信号与科里奥利加速度信号混淆,增加了检测难度。
核磁共振陀螺仪(Nuclear Magnetic Resonance Gyroscope)
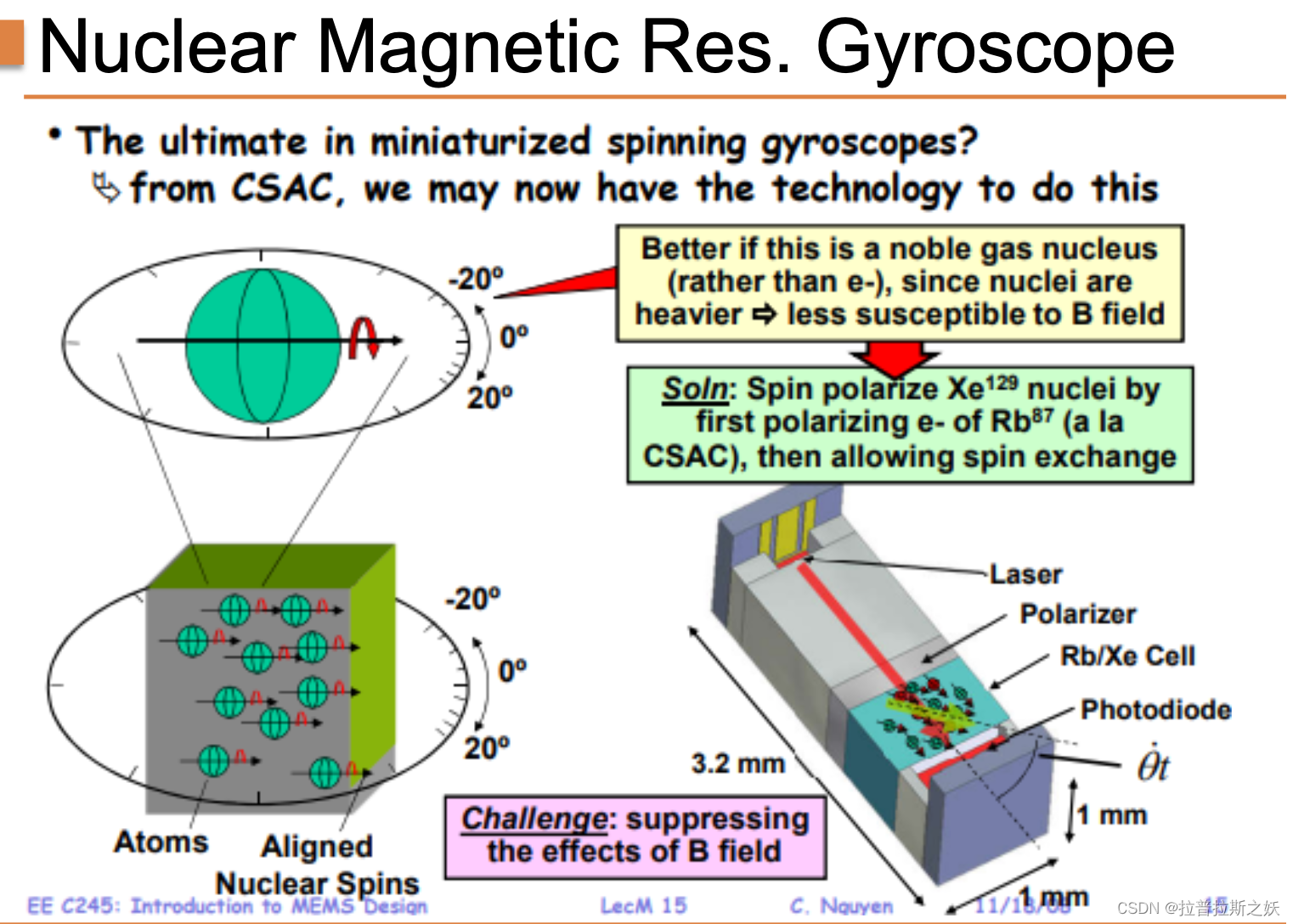
核磁共振陀螺仪通过利用原子核的自旋特性,实现了高灵敏度和高精度的旋转测量。通过精确的激光极化和自旋交换过程,结合有效的磁场屏蔽技术,NMR陀螺仪能够在精密导航和定位系统中发挥重要作用。
核磁共振陀螺仪(NMR Gyroscope)利用了原子核的自旋特性,通过精确控制和检测这些自旋行为来测量旋转。以下是对图中各部分的详细解释。
基本原理
核磁共振陀螺仪通过极化原子核的自旋,并利用自旋交换过程,检测自旋的变化以测量旋转。这种陀螺仪具有非常高的灵敏度和精度,适合用于精密导航和定位系统。
关键组件
-
原子和核自旋(Atoms and Nuclear Spins):
- 图左侧展示了原子核自旋的排列。
- 当原子核的自旋被极化时,它们在外部磁场中会有一定的取向。
-
激光和偏振器(Laser and Polarizer):
- 激光用于激发原子,偏振器用于控制激光的偏振状态。
- 通过激光的照射,可以极化原子核的自旋。
-
铷/氙细胞(Rb/Xe Cell):
- 包含铷和氙的混合气体细胞。
- 铷原子的电子先被极化,然后通过自旋交换过程将极化转移到氙原子的核上。
-
光电二极管(Photodiode):
- 检测激光通过气体细胞后的信号变化。
- 这些信号变化反映了核自旋的状态,从而可以推断出旋转信息。
操作过程
-
自旋极化(Spin Polarization):
- 使用激光极化铷原子的电子自旋。
- 极化的电子自旋通过自旋交换过程,将极化转移到氙原子的核自旋上。
-
自旋交换(Spin Exchange):
- 在铷和氙之间进行自旋交换,使氙的核自旋极化。
- 极化后的核自旋在外部磁场中会有稳定的取向。
-
旋转检测(Rotation Detection):
- 当系统旋转时,核自旋的取向会发生变化。
- 这种变化通过光电二极管检测激光信号的变化来测量。
优势
-
使用稀有气体核(Noble Gas Nucleus):
- 使用氙等稀有气体的核自旋,由于核自旋较重,对外部磁场变化不敏感,稳定性更高。
-
极高的灵敏度:
- 核磁共振效应能够检测非常微小的旋转变化,灵敏度远高于传统机械陀螺仪。
挑战
- 抑制磁场效应(Suppressing B Field Effects) :
- 需要有效地抑制外部磁场对核自旋的影响。
- 通过精确的磁屏蔽和控制技术,减小磁场干扰对测量结果的影响。
图示解释
-
原子核自旋对齐(Aligned Nuclear Spins):
- 图左展示了原子核自旋在外部磁场中的排列。
- 极化后的自旋在旋转时会发生预期的变化。
-
NMR陀螺仪结构(NMR Gyroscope Structure):
- 图右展示了NMR陀螺仪的实际结构,包括激光、偏振器、铷/氙细胞和光电二极管。
- 通过激光极化和光电二极管检测,完成旋转测量。
Determining Sensor Resolution
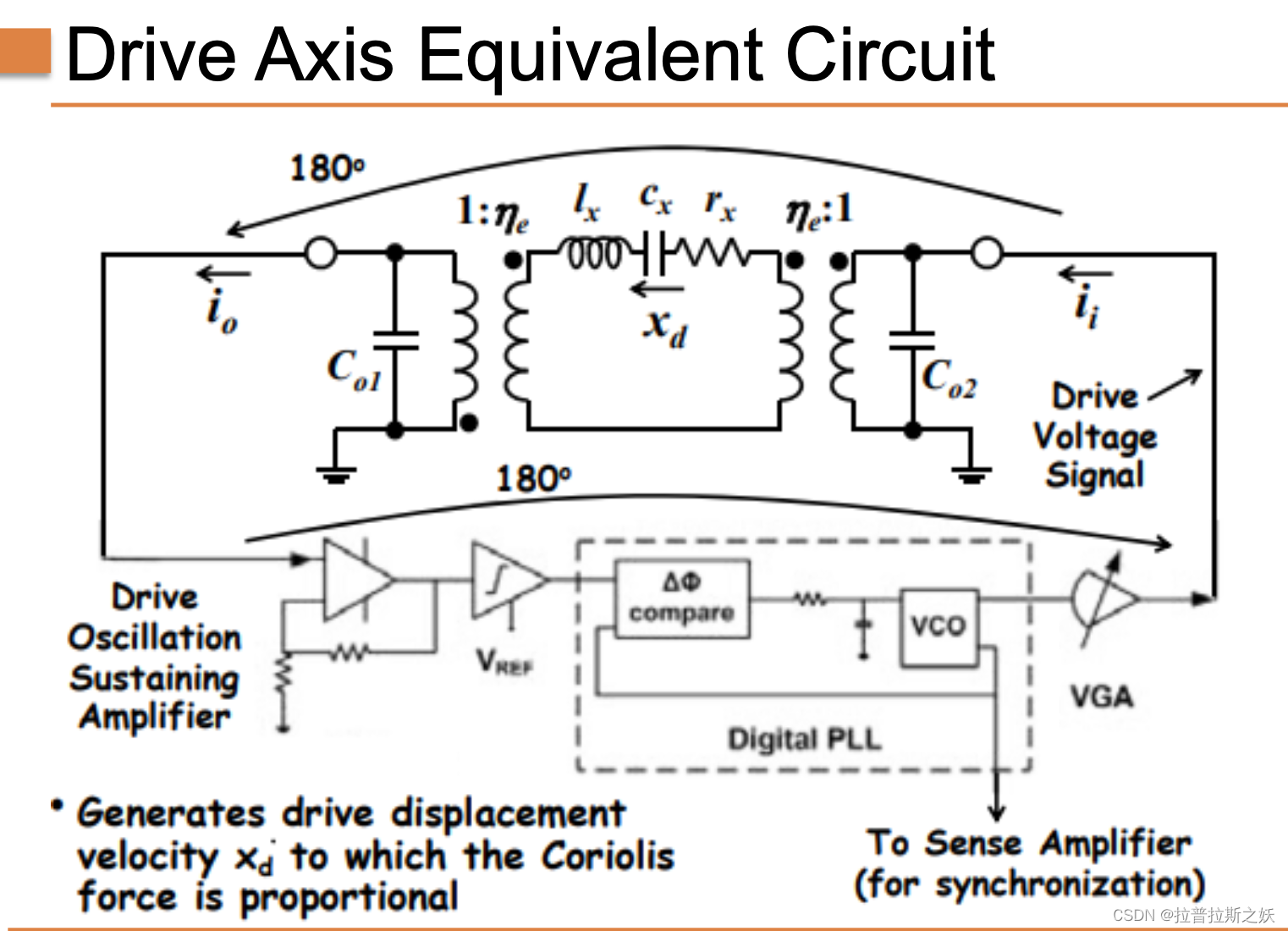
MEMS调谐叉式陀螺仪及其驱动轴等效电路
通过详细的电路设计和驱动轴等效电路模型,MEMS调谐叉式陀螺仪能够实现高精度的旋转速率测量。驱动振荡维持放大器和增益控制放大器确保系统持续稳定的振动,而数字锁相环和差分感应放大器则保证信号的准确处理和输出。
-
等效电路模型:
- 展示了驱动轴的等效电路模型,包括电感( L x L_x Lx)、电容( C o 1 C_o1 Co1 和 C o 2 C_o2 Co2)、电阻( R x R_x Rx)和等效的位移速度( x d x_d xd)。
-
驱动振荡维持放大器(Drive Oscillation Sustaining Amplifier):
- 产生与科里奥利力成比例的驱动位移速度。
电路部分
-
初级电感电容回路(Primary LC Circuit):
- 由电感 L x L_x Lx 和电容 C o 1 C_o1 Co1 组成,用于形成振荡回路。
-
次级电感电容回路(Secondary LC Circuit):
- 由电感 L x L_x Lx 和电容 C o 2 C_o2 Co2 组成,用于形成对称的振荡回路。
-
驱动电压信号(Drive Voltage Signal):
- 输入到驱动电极,驱动证明质量块在平面内振动。
-
数字锁相环(Digital Phase-Locked Loop, PLL):
- 精确控制振荡频率,以确保驱动信号的稳定性。
-
增益控制放大器(Variable Gain Amplifier, VGA):
- 调节驱动信号的幅度,以维持恒定的振动幅度。
操作原理
-
振荡产生:
- 驱动电压信号通过增益控制放大器和锁相环,维持恒定的振动。
-
信号同步:
- 数字锁相环确保振荡信号与驱动电压信号同步,保持系统稳定。
-
驱动位移速度生成:
- 振荡维持放大器生成与科里奥利力成比例的驱动位移速度 x d x_d xd。
驱动到感应传递函数(Drive-to-Sense Transfer Function)
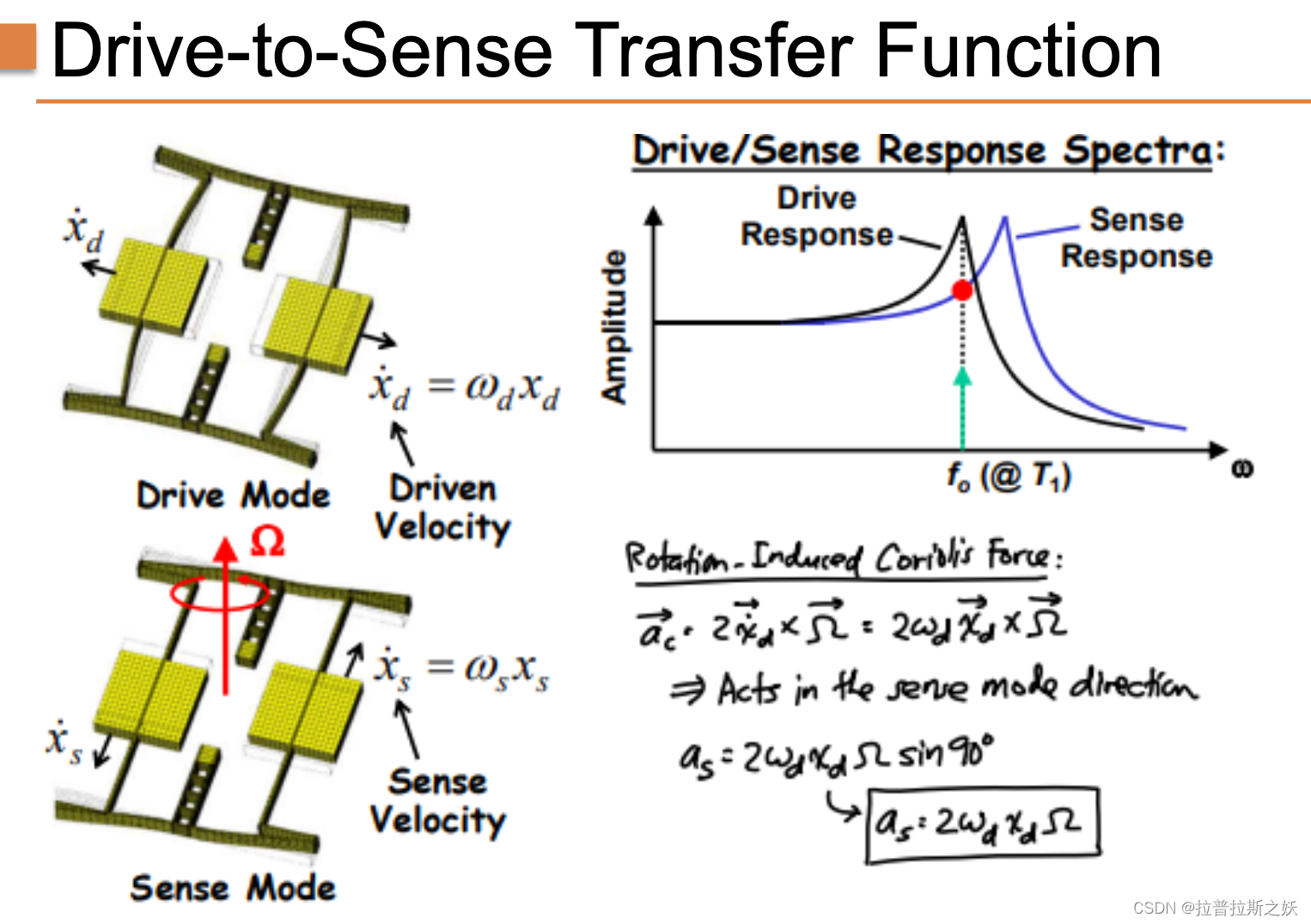
这张图展示了MEMS调谐叉式陀螺仪中驱动模式与感应模式之间的关系,以及如何通过驱动和感应的频率响应来测量旋转速率。以下是对图中各部分的详细解释。
在MEMS调谐叉式陀螺仪中,驱动到感应传递函数描述了系统如何从驱动模式的振动传递到感应模式的响应。这个传递函数对于理解和设计陀螺仪的工作原理和性能至关重要。
关键概念和术语
-
驱动模式(Drive Mode):
- 在驱动模式下,证明质量块在驱动电极的作用下以频率 ω d \omega_d ωd 振动。
- 驱动位移速度表示为 x ˙ d = ω d x d \dot{x}_d = \omega_d x_d x˙d=ωdxd,其中 ω d \omega_d ωd 为驱动角速度, x d x_d xd 为驱动位移。
-
感应模式(Sense Mode):
- 当陀螺仪系统受到旋转角速度 Ω \Omega Ω 的作用时,科里奥利力使证明质量块在感应模式下移动。
- 感应位移速度表示为 x ˙ s = ω s x s \dot{x}_s = \omega_s x_s x˙s=ωsxs,其中 ω s \omega_s ωs 为感应角速度, x s x_s xs 为感应位移。
科里奥利力(Coriolis Force)
-
科里奥利力公式 :
a c = 2 ( x ˙ d × Ω ) \mathbf{a}_c = 2 (\dot{x}_d \times \Omega) ac=2(x˙d×Ω)- a c \mathbf{a}_c ac 为科里奥利加速度。
- x ˙ d \dot{x}_d x˙d 为驱动位移速度。
- Ω \Omega Ω 为旋转角速度。
-
旋转引起的科里奥利力 :
a c = 2 ω d x d Ω sin ( 9 0 ∘ ) \mathbf{a}_c = 2 \omega_d x_d \Omega \sin(90^\circ) ac=2ωdxdΩsin(90∘)- 在最大化情况下, sin ( 9 0 ∘ ) = 1 \sin(90^\circ) = 1 sin(90∘)=1,公式简化为:
a s = 2 ω d x d Ω a_s = 2 \omega_d x_d \Omega as=2ωdxdΩ
- 在最大化情况下, sin ( 9 0 ∘ ) = 1 \sin(90^\circ) = 1 sin(90∘)=1,公式简化为:
驱动到感应传递函数
驱动到感应传递函数描述了驱动模式下的振动如何通过科里奥利力转换为感应模式下的位移响应。该传递函数可以用来分析和设计MEMS陀螺仪的性能。
频率响应频谱
-
驱动频率响应(Drive Response):
- 图右侧的频谱图中,黑色曲线表示驱动频率响应。
- 在驱动频率 ω d \omega_d ωd 下,系统的响应幅度最大,达到共振状态。
-
感应频率响应(Sense Response):
- 图右侧的频谱图中,蓝色曲线表示感应频率响应。
- 在感应频率 ω s \omega_s ωs 下,系统的响应幅度最大,达到共振状态。
传递函数的数学表示
传递函数 H ( s ) H(s) H(s) 可以表示为系统从输入(驱动模式的振动)到输出(感应模式的响应)的关系。通常,传递函数可以表示为:
H ( s ) = X s ( s ) X d ( s ) H(s) = \frac{X_s(s)}{X_d(s)} H(s)=Xd(s)Xs(s)
其中, X d ( s ) X_d(s) Xd(s) 是驱动模式下的位移, X s ( s ) X_s(s) Xs(s) 是感应模式下的位移, s s s 是复频域变量。
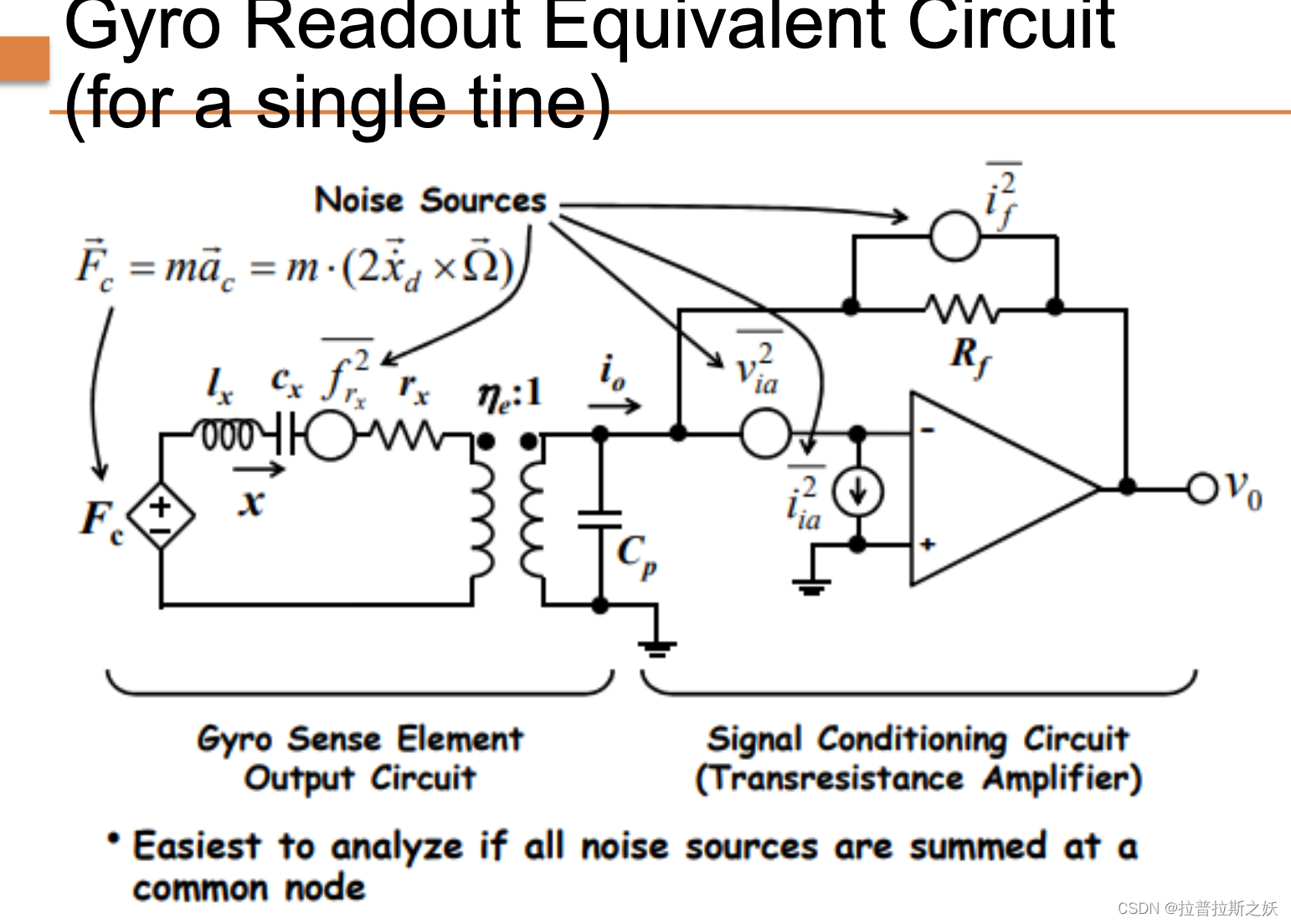
陀螺仪读取等效电路(单根叉齿)
MEMS调谐叉式陀螺仪的读取等效电路通过将机械振动转换为电信号,并通过跨阻放大器放大,最终输出反映旋转速率的电压信号。噪声源对输出信号质量有显著影响,因此在设计中需要特别注意减小噪声干扰。
基本原理
MEMS调谐叉式陀螺仪的读取电路主要包括陀螺传感元件输出电路和信号调理电路。通过检测科里奥利力引起的位移和电流变化,陀螺仪可以测量旋转速率。
关键组件
陀螺传感元件输出电路(Gyro Sense Element Output Circuit)
-
科里奥利力(Coriolis Force, F c \mathbf{F}_c Fc):
- 由公式 F c = m a c = m ⋅ ( 2 x ˙ d × Ω ) \mathbf{F}_c = m \mathbf{a}_c = m \cdot (2 \dot{x}_d \times \Omega) Fc=mac=m⋅(2x˙d×Ω) 表示,其中 x ˙ d \dot{x}_d x˙d 为驱动速度, Ω \Omega Ω 为旋转角速度。
-
等效电路模型:
- 包括电感 L x L_x Lx、电容 C x C_x Cx、电阻 R x R_x Rx 和等效位移速度 x x x。
- 这些元件表示证明质量块的机械振动特性。
-
电流和电压:
- i o i_o io 表示输出电流, C p C_p Cp 表示寄生电容。
- 输出电流和电压的变化反映了证明质量块的运动状态。
信号调理电路(Signal Conditioning Circuit)
-
跨阻放大器(Transresistance Amplifier):
- 转换输出电流 i o i_o io 为输出电压 V 0 V_0 V0。
- 放大电阻 R f R_f Rf 决定了电流到电压的转换增益。
-
噪声源(Noise Sources):
- i i a 2 ‾ \overline{i_{ia}^2} iia2 表示放大器输入电流噪声。
- v i a 2 ‾ \overline{v_{ia}^2} via2 表示放大器输入电压噪声。
- i f 2 ‾ \overline{i_f^2} if2 表示反馈电阻的电流噪声。
操作过程
-
科里奥利力生成:
- 当系统旋转时,科里奥利力 F c \mathbf{F}_c Fc 作用在证明质量块上,引起其垂直于驱动方向的运动。
-
机械振动转换为电信号:
- 证明质量块的机械振动通过等效电路模型转换为电流 i o i_o io 和电压信号。
-
信号调理:
- 输出电流 i o i_o io 通过跨阻放大器转换为输出电压 V 0 V_0 V0。
- 放大器的输入电流和电压噪声,以及反馈电阻的噪声,都会影响最终输出信号的质量。
等效电路分析
噪声源影响
-
输入电流噪声( i i a 2 ‾ \overline{i_{ia}^2} iia2):
- 影响跨阻放大器的输入信号,导致输出电压 V 0 V_0 V0 中的噪声成分增加。
-
输入电压噪声( v i a 2 ‾ \overline{v_{ia}^2} via2):
- 影响跨阻放大器的输入信号,进一步引入噪声。
-
反馈电阻噪声( i f 2 ‾ \overline{i_f^2} if2):
- 反馈电阻的噪声直接影响输出电压 V 0 V_0 V0。
读取信号
- 输出电压( V 0 V_0 V0) :
- 通过跨阻放大器转换得到的输出电压,反映了科里奥利力引起的位移。
- V 0 V_0 V0 包含信号和噪声成分,信号调理电路的设计需要尽量减小噪声影响。
出题
基于上传的《Lecture 16-Gyros.pdf》,以下是可能在考试中会出现的题目以及答案的中英文对照。这些题目涵盖了讲座中涉及到的主要概念和技术细节。
题目与答案
1. 经典旋转陀螺仪的工作原理
问题: 经典旋转陀螺仪是如何工作的?请描述其基本原理。
答案: 经典旋转陀螺仪的工作原理基于动量守恒定律。当陀螺仪旋转时,其转动轴的方向由于动量守恒会保持不变,这使得陀螺仪能够测量旋转速度,从而确定方向。这一特性在导航中非常重要。
Question: How does a classic spinning gyroscope work? Please describe its basic principle.
Answer: The principle of a classic spinning gyroscope is based on the conservation of momentum. When the gyroscope spins, its axis of rotation remains fixed due to the conservation of angular momentum, allowing it to measure rotation rate and determine orientation. This characteristic is crucial for navigation.
2. 科里奥利效应的作用
问题: 科里奥利效应如何影响地球大气的运动?请解释科里奥利力的概念。
答案: 科里奥利效应描述了由于地球自转而引起的运动偏转。具体来说,在地球上运动的物体会由于科里奥利力的作用而产生偏转,在北半球向右,在南半球向左。这一效应对大气运动的影响显著,导致气流和洋流的弯曲。
Question: How does the Coriolis effect influence the movement of Earth's atmosphere? Please explain the concept of Coriolis force.
Answer: The Coriolis effect describes the deflection of moving objects caused by Earth's rotation. Specifically, objects moving on Earth experience a deflection due to the Coriolis force: to the right in the Northern Hemisphere and to the left in the Southern Hemisphere. This effect significantly influences atmospheric movements, causing the bending of winds and ocean currents.
3. 振动陀螺仪的基本操作
问题: 描述振动陀螺仪的基本操作原理。
答案: 振动陀螺仪通过振动结构产生动量,并利用动量守恒原理来测量旋转速度和方向。例如,在一个旋转框架中振动质量的运动可以用来检测旋转运动,从而确定方向和速度。
Question: Describe the basic operating principle of a vibratory gyroscope.
Answer: Vibratory gyroscopes generate momentum by vibrating structures and use the conservation of momentum to measure rotation rate and orientation. For example, the movement of a vibrating mass in a rotating frame can be used to detect rotational motion, thereby determining the direction and rate of rotation.
4. MEMS基陀螺仪的优点
问题: 什么是MEMS基陀螺仪?它们有哪些优点?
答案: MEMS基陀螺仪是基于微电子机械系统技术制造的陀螺仪。这些陀螺仪通常体积小、成本低、功耗低,且可以集成到各种电子设备中,如智能手机和汽车导航系统。
Question: What are MEMS-based gyroscopes and what are their advantages?
Answer: MEMS-based gyroscopes are gyroscopes manufactured using Micro-Electro-Mechanical Systems (MEMS) technology. These gyroscopes are typically small, low-cost, and low-power, making them suitable for integration into various electronic devices such as smartphones and automotive navigation systems.
5. 调谐叉式陀螺仪的工作原理
问题: 描述MEMS基调谐叉式陀螺仪的工作原理。
答案: MEMS基调谐叉式陀螺仪利用调谐叉结构的振动来测量旋转速度。调谐叉的一端在驱动轴上振动,当陀螺仪旋转时,科里奥利力使调谐叉在检测轴上产生振动,通过测量这个振动可以确定旋转速度和方向。
Question: Describe the working principle of a MEMS-based tuning fork gyroscope.
Answer: MEMS-based tuning fork gyroscopes use the vibrations of a tuning fork structure to measure rotation rate. One end of the tuning fork vibrates along the drive axis, and when the gyroscope rotates, the Coriolis force induces vibrations along the sense axis. By measuring these vibrations, the rotation rate and direction can be determined.
6. 零速偏差误差
问题: 什么是零速偏差误差?它对陀螺仪性能有何影响?
答案: 零速偏差误差是指当陀螺仪实际没有旋转时,输出的非零旋转速度信号。这个误差会影响陀螺仪的精度,特别是在需要高精度测量的应用中。解决这个问题的方法包括在设计和校准过程中进行补偿。
Question: What is zero rate bias error and how does it affect gyroscope performance?
Answer: Zero rate bias error refers to the non-zero rotation rate signal output when the gyroscope is actually not rotating. This error affects the accuracy of the gyroscope, especially in applications requiring high precision measurements. Solutions to this issue include compensation during design and calibration processes.
7. 核磁共振陀螺仪的原理
问题: 什么是核磁共振陀螺仪?其工作原理是什么?
答案: 核磁共振陀螺仪利用核磁共振现象来测量旋转速度。当一个物体旋转时,置于磁场中的原子核会产生共振频率的变化,通过检测这些变化可以确定旋转速度。这种陀螺仪通常具有高精度和稳定性。
Question: What is a nuclear magnetic resonance gyroscope and how does it work?
Answer: A nuclear magnetic resonance gyroscope uses the phenomenon of nuclear magnetic resonance to measure rotation rate. When an object rotates, the nuclei placed in a magnetic field experience changes in resonance frequency. By detecting these changes, the rotation rate can be determined. This type of gyroscope typically offers high precision and stability.
8. 驱动轴等效电路
问题: 请解释MEMS陀螺仪中驱动轴等效电路的作用。
答案: 驱动轴等效电路用于模拟和分析驱动轴的电气特性。这有助于设计和优化陀螺仪的性能,通过等效电路可以理解驱动轴的阻抗、谐振频率和其他电气参数,从而提高陀螺仪的精度和稳定性。
Question: Please explain the role of the drive axis equivalent circuit in a MEMS gyroscope.
Answer: The drive axis equivalent circuit is used to simulate and analyze the electrical characteristics of the drive axis. This helps in designing and optimizing the performance of the gyroscope. By using an equivalent circuit, the impedance, resonant frequency, and other electrical parameters of the drive axis can be understood, thereby improving the accuracy and stability of the gyroscope.
9. 驱动到检测传递函数
问题: 什么是驱动到检测传递函数?它如何影响陀螺仪的性能?
答案: 驱动到检测传递函数描述了驱动轴的运动如何转化为检测轴的信号。这一函数对于理解陀螺仪的灵敏度和响应时间至关重要。优化传递函数可以提高陀螺仪的精度和动态性能。
Question: What is the drive-to-sense transfer function and how does it affect gyroscope performance?
Answer: The drive-to-sense transfer function describes how the motion of the drive axis is converted into a signal in the sense axis. This function is crucial for understanding the sensitivity and response time of the gyroscope. Optimizing the transfer function can enhance the accuracy and dynamic performance of the gyroscope.
根据《Lecture 16-Gyros.pdf》中涉及到的内容,以下是一些可能会出现在考试中的计算和电路题目以及答案的中英文对照。这些题目主要涵盖了陀螺仪的电路建模和分析。
计算/电路题目与答案
1. 驱动轴等效电路分析
问题: 画出MEMS陀螺仪驱动轴的等效电路,并解释其各组成部分的作用。
答案 :
Equivalent Circuit Components:
- Resistor ®: Represents the electrical resistance of the drive axis.
- Inductor (L): Represents the inductance associated with the drive axis.
- Capacitor ©: Represents the capacitance in the drive axis circuit.
- Voltage Source (V): Represents the driving voltage applied to the drive axis.
plaintext
R
+-----/\/\-----+
| |
( ) ( )
C L
| |
+------ V -----+Explanation:
- The resistor ® models the resistive losses in the drive axis.
- The inductor (L) models the inductive reactance due to the coil or other inductive elements.
- The capacitor © models the capacitive reactance.
- The voltage source (V) represents the driving voltage that causes the axis to vibrate.
Question: Draw the equivalent circuit of the drive axis in a MEMS gyroscope and explain the role of each component.
Answer :
Equivalent Circuit Components:
- Resistor ®: Represents the electrical resistance of the drive axis.
- Inductor (L): Represents the inductance associated with the drive axis.
- Capacitor ©: Represents the capacitance in the drive axis circuit.
- Voltage Source (V): Represents the driving voltage applied to the drive axis.
plaintext
R
+-----/\/\-----+
| |
( ) ( )
C L
| |
+------ V -----+Explanation:
- The resistor ® models the resistive losses in the drive axis.
- The inductor (L) models the inductive reactance due to the coil or other inductive elements.
- The capacitor © models the capacitive reactance.
- The voltage source (V) represents the driving voltage that causes the axis to vibrate.
2. 驱动到检测传递函数计算
问题: 给定驱动轴电路的参数,计算从驱动到检测的传递函数H(s),其中s是复频率变量。
答案 :
假设驱动轴电路的阻抗为 Z ( s ) Z(s) Z(s),则传递函数 H ( s ) H(s) H(s)可以表示为:
H ( s ) = V out ( s ) V in ( s ) = 1 R + s L + 1 s C H(s) = \frac{V_{\text{out}}(s)}{V_{\text{in}}(s)} = \frac{1}{R + sL + \frac{1}{sC}} H(s)=Vin(s)Vout(s)=R+sL+sC11
其中:
- R R R是电阻
- L L L是电感
- C C C是电容
通过将参数代入,可以计算具体的传递函数。
Question : Given the parameters of the drive axis circuit, calculate the transfer function H ( s ) H(s) H(s) from drive to sense, where s s s is the complex frequency variable.
Answer :
Assuming the impedance of the drive axis circuit is Z ( s ) Z(s) Z(s), the transfer function H ( s ) H(s) H(s) can be expressed as:
H ( s ) = V out ( s ) V in ( s ) = 1 R + s L + 1 s C H(s) = \frac{V_{\text{out}}(s)}{V_{\text{in}}(s)} = \frac{1}{R + sL + \frac{1}{sC}} H(s)=Vin(s)Vout(s)=R+sL+sC11
Where:
- R R R is the resistance
- L L L is the inductance
- C C C is the capacitance
By substituting the parameters, the specific transfer function can be calculated.
3. 模式匹配对分辨率的影响
问题: 解释模式匹配如何提高MEMS陀螺仪的分辨率,并计算匹配频率下的品质因数(Q)。
答案 :
模式匹配通过调整驱动频率和检测频率,使其接近或相等,从而最大化信号强度和分辨率。品质因数 Q Q Q表示为:
Q = ω 0 L R Q = \frac{\omega_0 L}{R} Q=Rω0L
其中:
- ω 0 \omega_0 ω0是共振角频率
- L L L是电感
- R R R是电阻
Question: Explain how mode matching improves the resolution of MEMS gyroscopes and calculate the quality factor (Q) at the matched frequency.
Answer :
Mode matching involves adjusting the drive frequency and the sense frequency to be close or equal, thereby maximizing the signal strength and resolution. The quality factor Q Q Q is given by:
Q = ω 0 L R Q = \frac{\omega_0 L}{R} Q=Rω0L
Where:
- ω 0 \omega_0 ω0 is the resonant angular frequency
- L L L is the inductance
- R R R is the resistance
4. 零速偏差误差的校正
问题: 描述一种校正零速偏差误差的方法,并给出校正后的信号公式。
答案 :
一种校正零速偏差误差的方法是使用数值校正技术,通过在静止时多次测量陀螺仪的输出信号,取其平均值作为零偏差进行校正。校正后的信号公式为:
V corrected = V measured − V bias V_{\text{corrected}} = V_{\text{measured}} - V_{\text{bias}} Vcorrected=Vmeasured−Vbias
其中:
- V corrected V_{\text{corrected}} Vcorrected是校正后的信号
- V measured V_{\text{measured}} Vmeasured是测量的信号
- V bias V_{\text{bias}} Vbias是零偏差
Question: Describe a method to correct the zero rate bias error and provide the corrected signal formula.
Answer :
One method to correct the zero rate bias error is to use numerical correction techniques by measuring the gyroscope's output signal multiple times when it is at rest and taking the average as the zero bias. The corrected signal formula is:
V corrected = V measured − V bias V_{\text{corrected}} = V_{\text{measured}} - V_{\text{bias}} Vcorrected=Vmeasured−Vbias
Where:
- V corrected V_{\text{corrected}} Vcorrected is the corrected signal
- V measured V_{\text{measured}} Vmeasured is the measured signal
- V bias V_{\text{bias}} Vbias is the zero bias