STM32存储左右互搏 模拟U盘桥接SPI总线FATS读写FLASH W25QXX
STM32的USB接口可以模拟成为U盘,通过FATS文件系统对连接的存储单元进行U盘方式的读写。
这里介绍STM32CUBEIDE开发平台HAL库模拟U盘桥接SPI总线FATS读写W25Q各型号FLASH的例程。
FLASH是常用的一种非易失存储单元,W25QXX系列Flash有不同容量的型号,如W25Q64的容量为64Mbit,也就是8MByte。
W25QXX介绍
W25QXX的SOIC封装如下所示,在采用SPI而不是QUAL SPI时,管脚定义为:

即由片选(/CS), 时钟(CLK), 数据输出(DO)和数据输入(DI)的组成4线SPI信号接口。VCC和GND提供电源和接地连接。
例程采用STM32H750VBT6芯片, FLASH可以选择为8/16/32/64/128/256/512/1024 Mbit的W25Q型号。例程实现可以通过U盘形式和串口控制双方式对FLASH内的文件进行操作,实现可交换操作的特性。
STM32工程配置
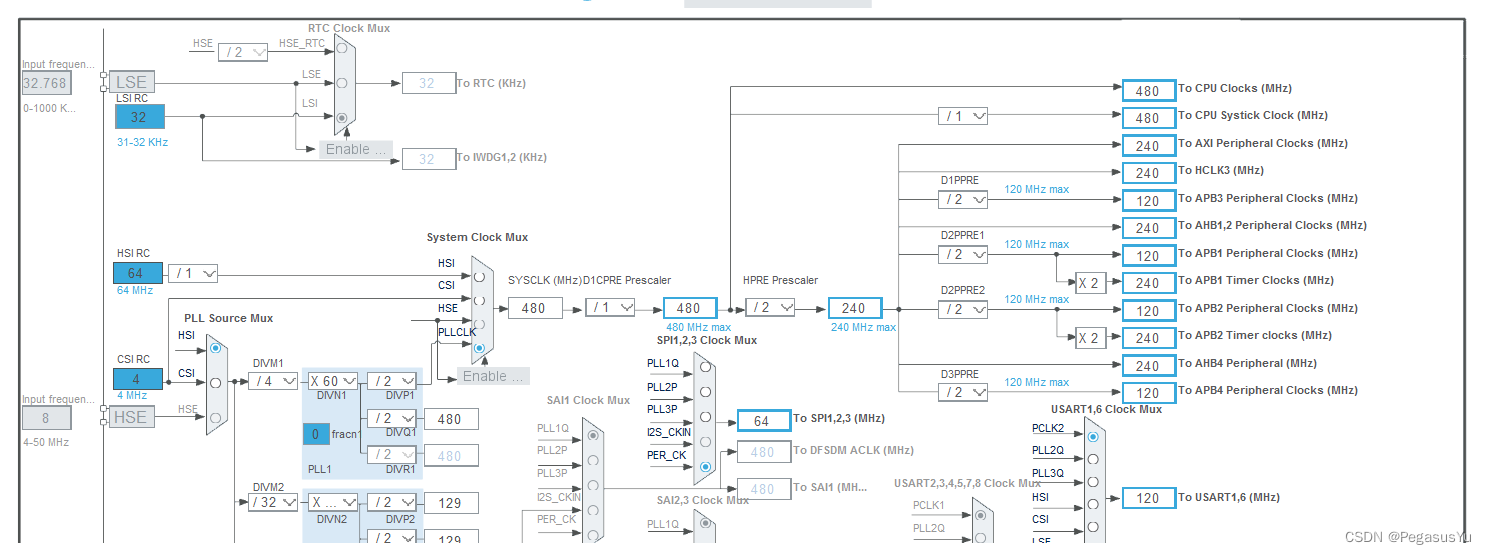
首先建立基本工程并设置时钟:
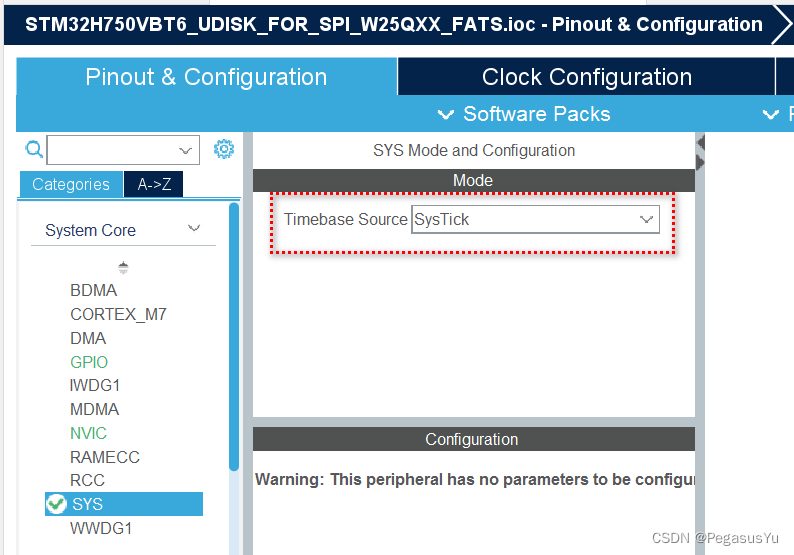
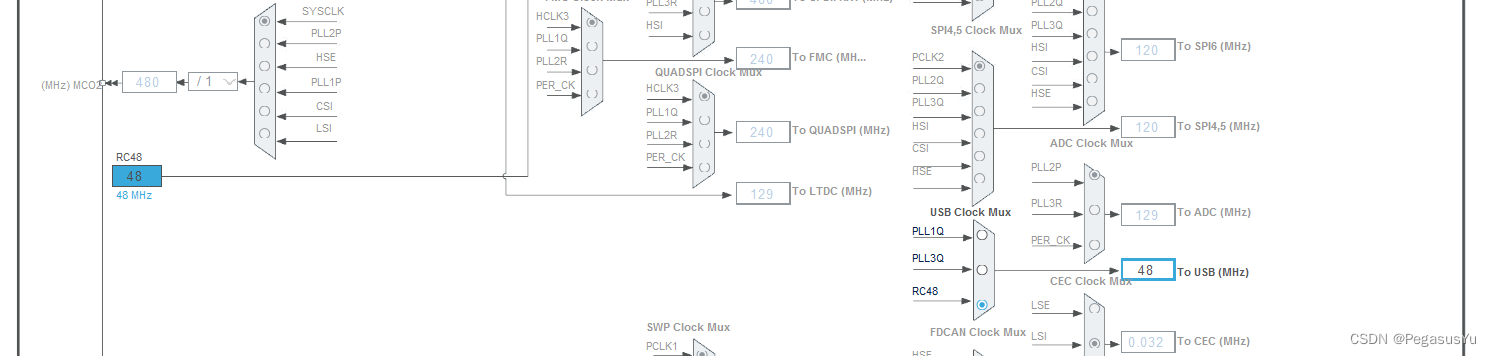
对于STM32H7,有专用的内部48MHz时钟用于USB接口, 其它应用采用内部高速时钟接口即可:
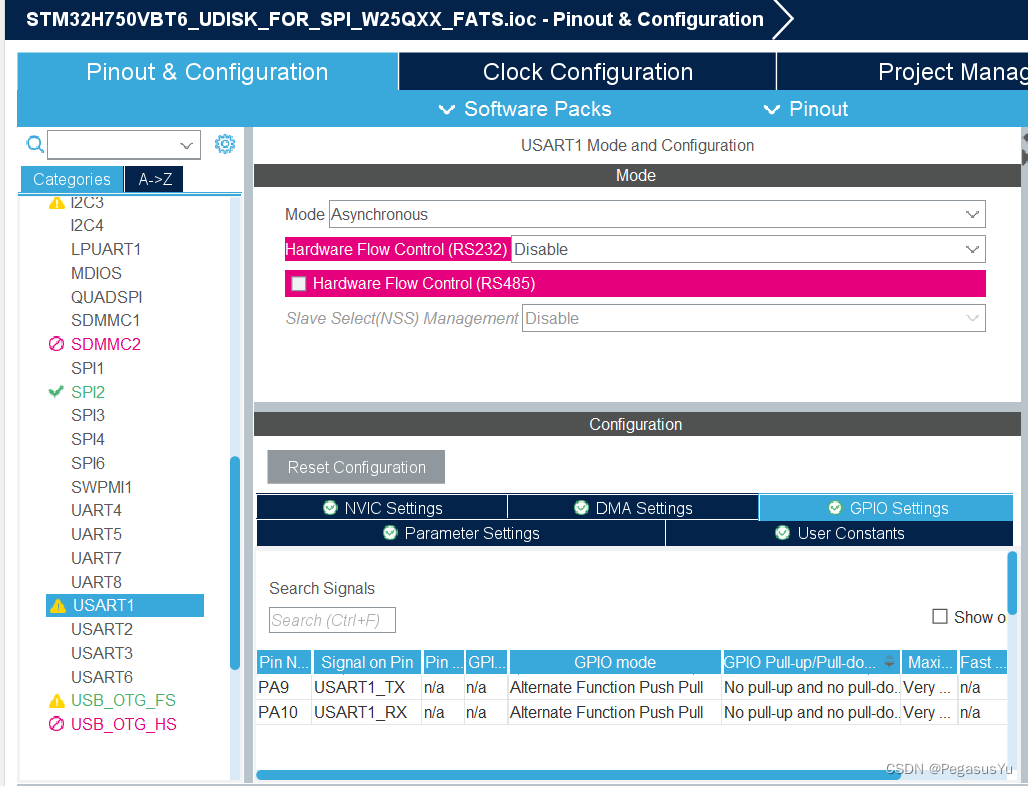
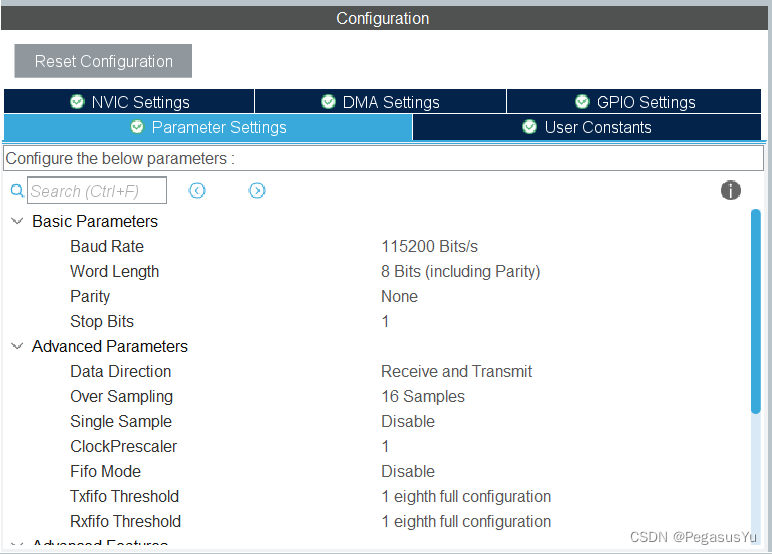
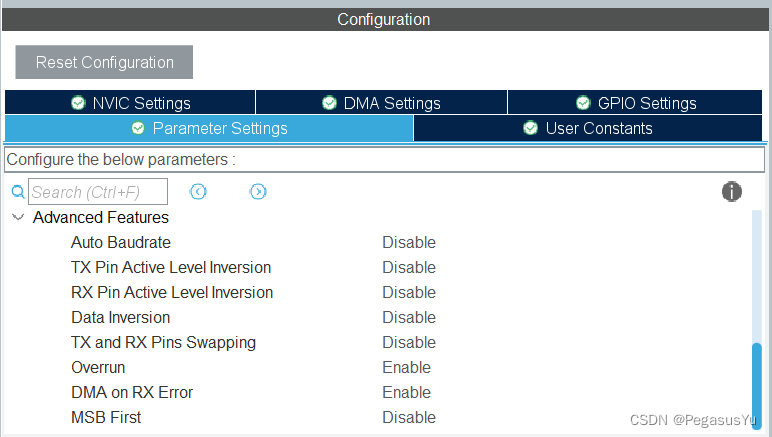
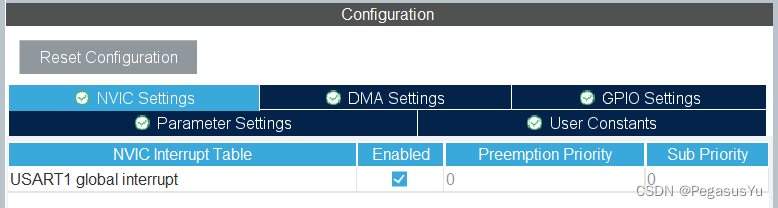
设置UART1作为通讯串口:
FLASH连接到了SPI2接口,对SPI2进行配置:
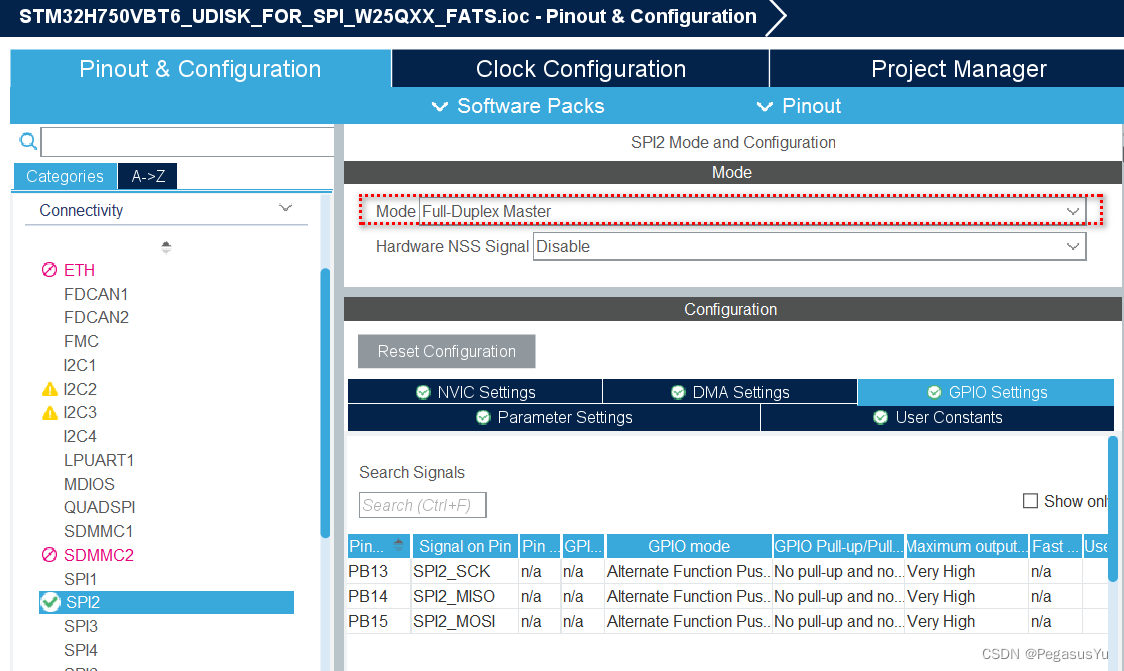
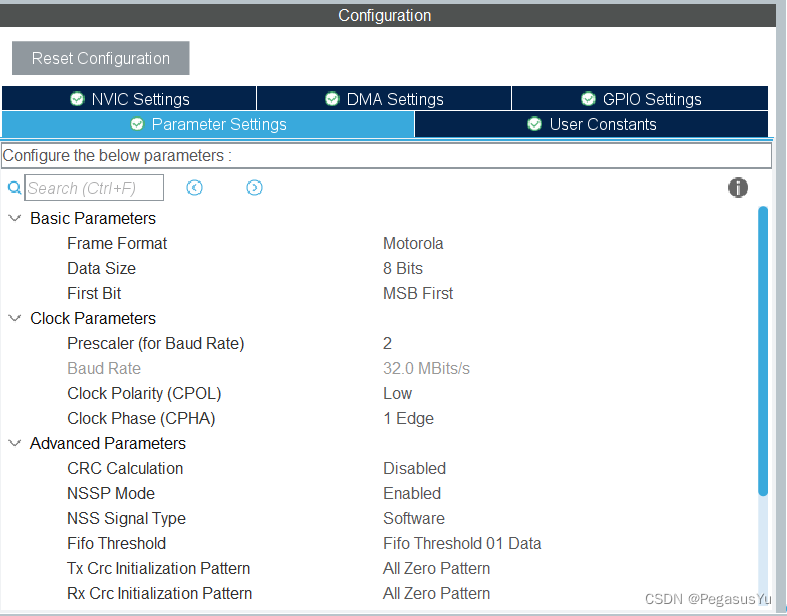
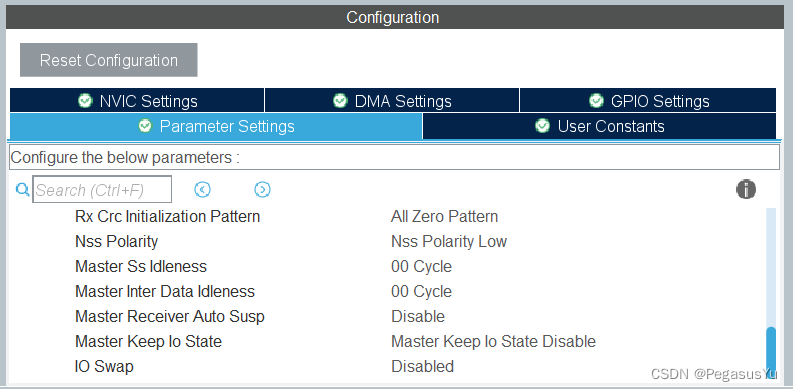
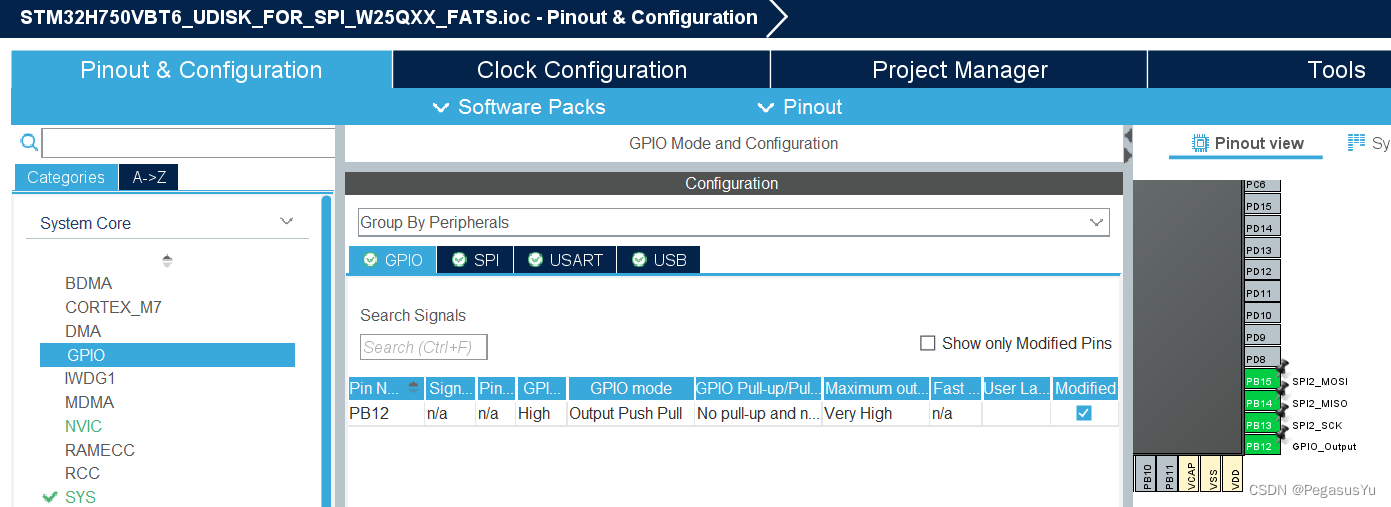
不用中断和DMA模式,SPI2的片选才用软件代码控制,配置一个GPIO作为片选输出:
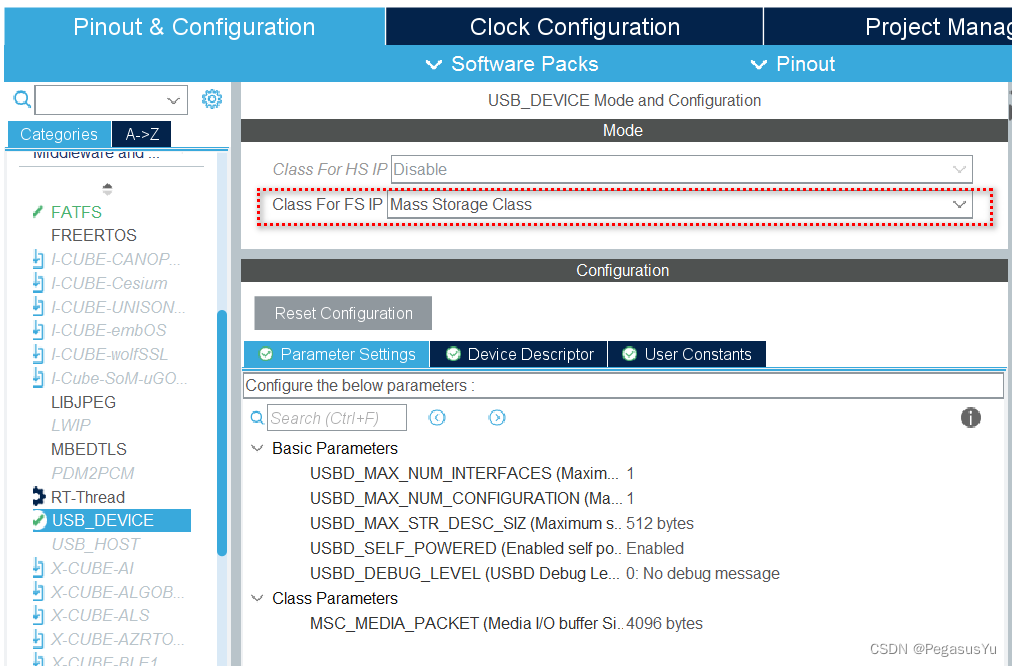
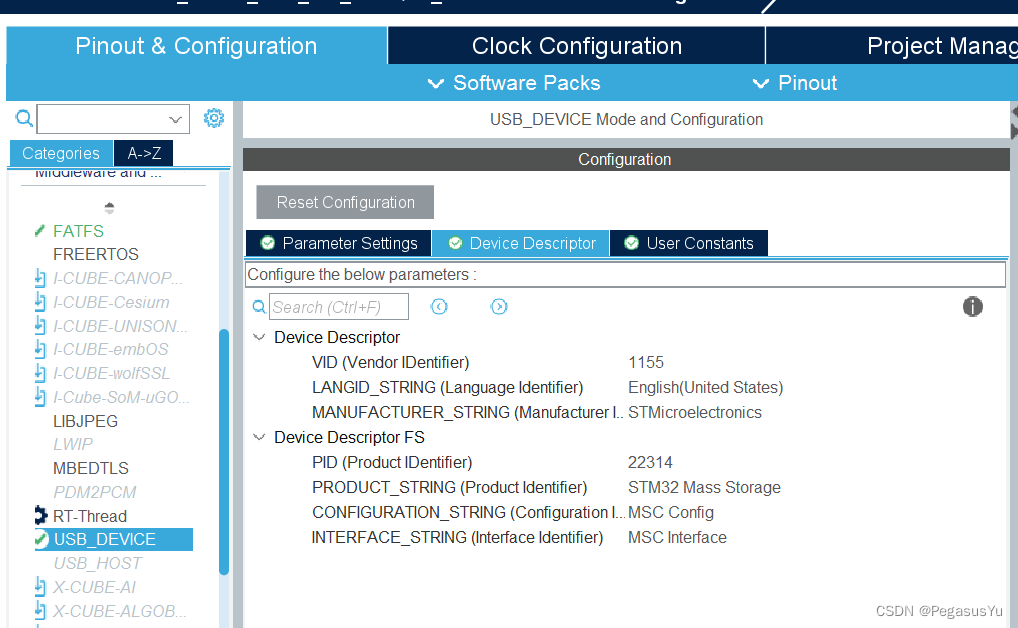
配置USB接口
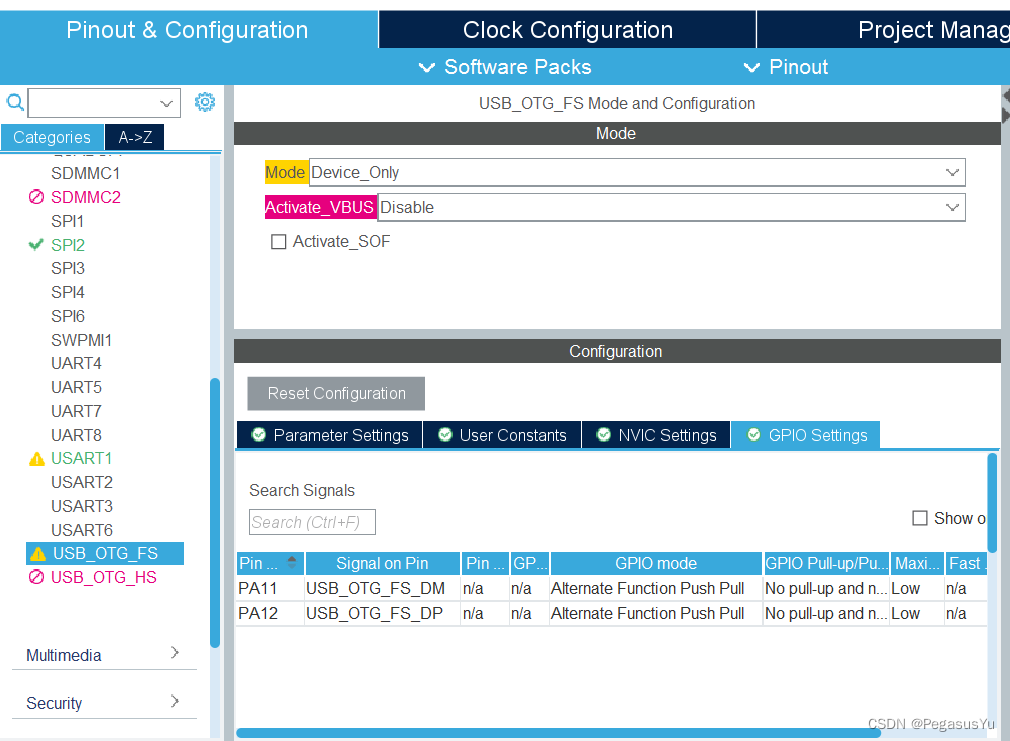
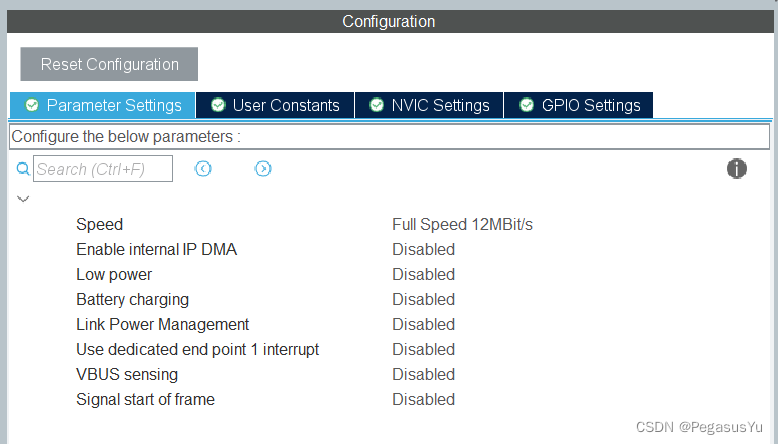
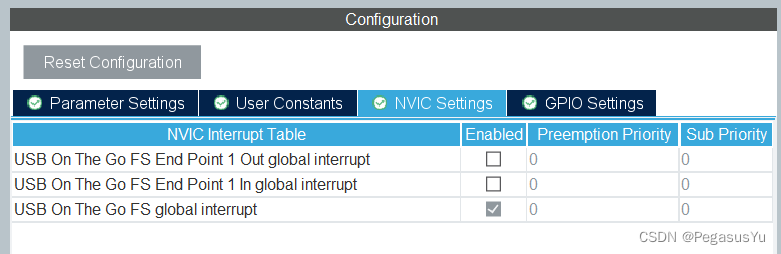
将USB接口例化为U盘模式:
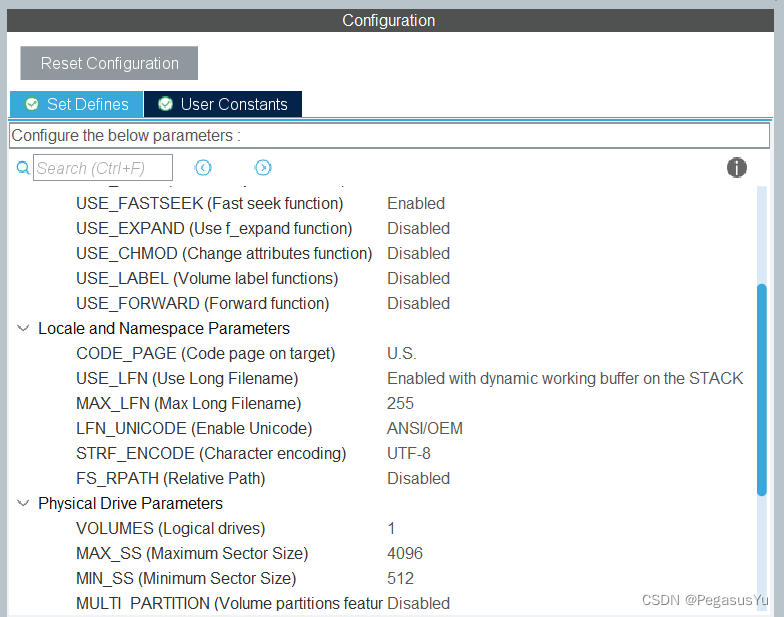
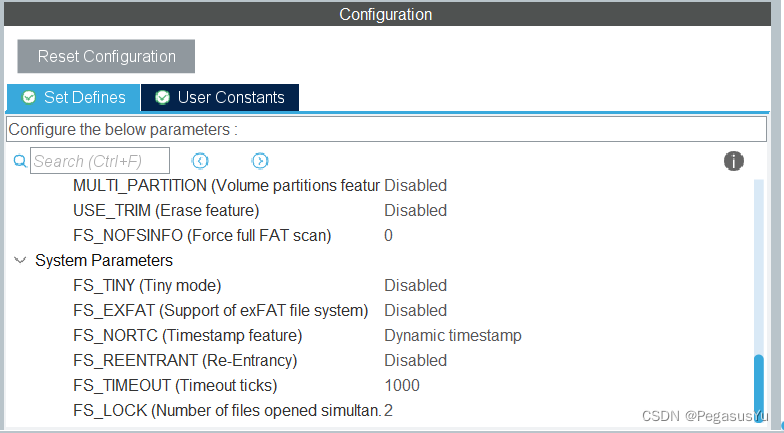
对FATS文件系统进行配置
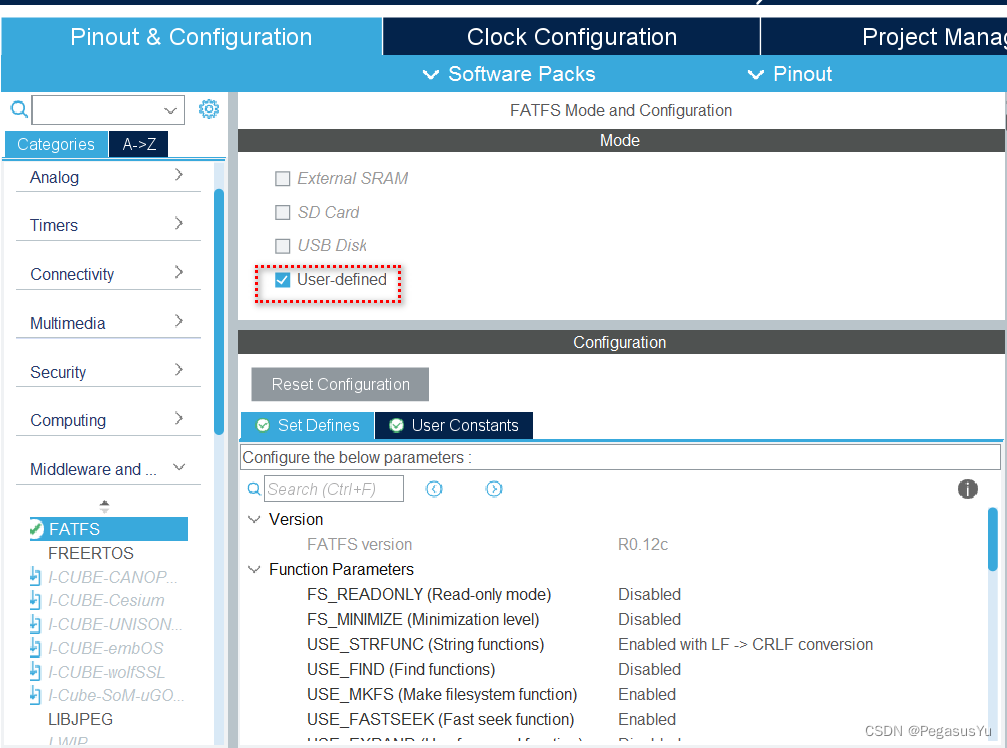
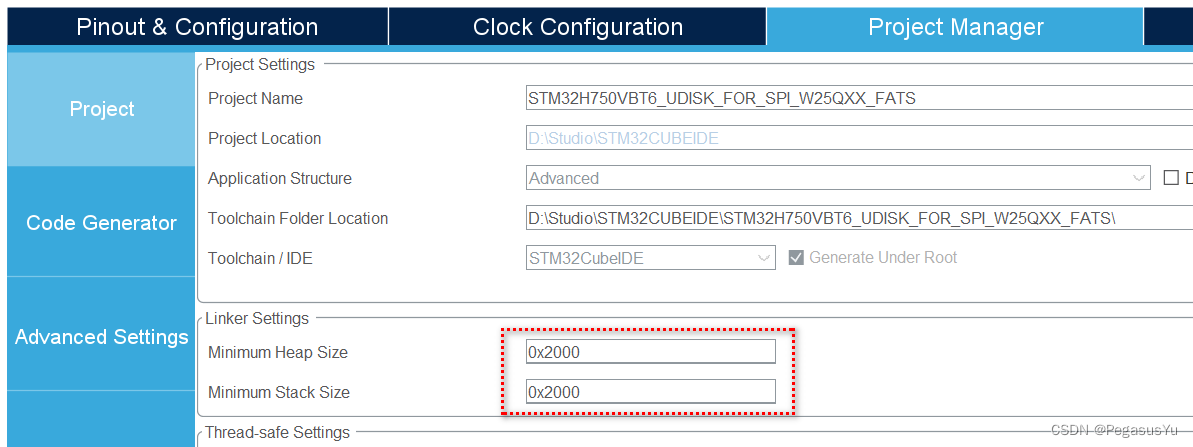
STM32H7资源多,可以将堆栈开大些:
保存并生成初始工程代码:
STM32工程代码
UART串口printf打印输出实现参考:STM32 UART串口printf函数应用及浮点打印代码空间节省 (HAL)
建立W25Q访问的库头文件W25QXX.h:
bash
#ifndef INC_W25QXX_H_
#define INC_W25QXX_H_
#include "main.h"
uint8_t SPI2_ReadWriteByte(uint8_t TxData);
//W25QXX serial chip list:
#define W25Q80_ID 0XEF13
#define W25Q16_ID 0XEF14
#define W25Q32_ID 0XEF15
#define W25Q64_ID 0XEF16
#define W25Q128_ID 0XEF17
#define W25Q256_ID 0XEF18
#define W25Q512_ID 0XEF19
#define W25Q1024_ID 0XEF20
extern uint16_t W25QXX_TYPE; //To indicate W25QXX type used in this procedure
//W25QXX chip select control function
#define W25QXX_CS(n) ( n ? HAL_GPIO_WritePin(GPIOB, GPIO_PIN_12, GPIO_PIN_SET) : HAL_GPIO_WritePin(GPIOB, GPIO_PIN_12, GPIO_PIN_RESET) )
//command table for W25QXX access
#define W25X_WriteEnable 0x06
#define W25X_WriteDisable 0x04
#define W25X_ReadStatusReg1 0x05
#define W25X_ReadStatusReg2 0x35
#define W25X_ReadStatusReg3 0x15
#define W25X_WriteStatusReg1 0x01
#define W25X_WriteStatusReg2 0x31
#define W25X_WriteStatusReg3 0x11
#define W25X_ReadData 0x03
#define W25X_FastReadData 0x0B
#define W25X_FastReadDual 0x3B
#define W25X_PageProgram 0x02
#define W25X_BlockErase 0xD8
#define W25X_SectorErase 0x20
#define W25X_ChipErase 0xC7
#define W25X_PowerDown 0xB9
#define W25X_ReleasePowerDown 0xAB
#define W25X_DeviceID 0xAB
#define W25X_ManufactDeviceID 0x90
#define W25X_JedecDeviceID 0x9F
#define W25X_Enable4ByteAddr 0xB7
#define W25X_Exit4ByteAddr 0xE9
uint8_t W25QXX_Init(void);
uint16_t W25QXX_ReadID(void); //Read W25QXX ID
uint8_t W25QXX_ReadSR(uint8_t reg_num); //Read from status register
void W25QXX_4ByteAddr_Enable(void); //Enable 4-byte address mode
void W25QXX_Write_SR(uint8_t reg_num,uint8_t d); //Write to status register
void W25QXX_Write_Enable(void); //Write enable
void W25QXX_Write_Disable(void); //Write disable
void W25QXX_Write_NoCheck(uint8_t* pBuffer,uint32_t WriteAddr,uint16_t NumByteToWrite); //Write operation w/o check
void W25QXX_Read(uint8_t* pBuffer,uint32_t ReadAddr,uint16_t NumByteToRead); //Read operation
void W25QXX_Write(uint8_t* pBuffer,uint32_t WriteAddr,uint16_t NumByteToWrite); //Write operation
void W25QXX_Erase_Chip(void); //Erase whole chip
void W25QXX_Erase_Sector(uint32_t Sector_Num); //Erase sector in specific sector number
void W25QXX_Wait_Busy(void); //Wait idle status before next operation
void W25QXX_PowerDown(void); //Enter power-down mode
void W25QXX_WAKEUP(void); //Wake-up
#endif /* INC_W25QXX_H_ */建立W25Q访问的库源文件W25QXX.c:
bash
#include "W25QXX.h"
extern SPI_HandleTypeDef hspi2;
extern void PY_Delay_us_t(uint32_t Delay);
//Write and read one byte in SPI2
uint8_t SPI2_ReadWriteByte(uint8_t TxData)
{
uint8_t Rxdata;
HAL_SPI_TransmitReceive(&hspi2,&TxData,&Rxdata,1, 1000);
return Rxdata;
}
uint16_t W25QXX_TYPE=W25Q64_ID;
//W25QXX initialization
uint8_t W25QXX_Init(void)
{
uint8_t temp;
W25QXX_CS(1);
W25QXX_TYPE=W25QXX_ReadID();
if((W25QXX_TYPE==W25Q256_ID)||(W25QXX_TYPE==W25Q512_ID)||(W25QXX_TYPE==W25Q1024_ID))
{
temp=W25QXX_ReadSR(3); //read status register 3
if((temp&0X01)==0) //judge address mode and configure to 4-byte address mode
{
W25QXX_CS(0);
SPI2_ReadWriteByte(W25X_Enable4ByteAddr);
W25QXX_CS(1);
}
}
if((W25QXX_TYPE==0x0000)||(W25QXX_TYPE==0xFFFF)) return 0;
else return 1;
}
//Read status registers of W25QXX
//reg_num: register number from 1 to 3
//return: value of selected register
//SR1 (default 0x00):
//BIT7 6 5 4 3 2 1 0
//SPR RV TB BP2 BP1 BP0 WEL BUSY
//SPR: default 0, status register protection bit used with WP
//TB,BP2,BP1,BP0: FLASH region write protection configuration
//WEL: write enable lock
//BUSY: busy flag (1: busy; 0: idle)
//SR2:
//BIT7 6 5 4 3 2 1 0
//SUS CMP LB3 LB2 LB1 (R) QE SRP1
//SR3:
//BIT7 6 5 4 3 2 1 0
//HOLD/RST DRV1 DRV0 (R) (R) WPS ADP ADS
uint8_t W25QXX_ReadSR(uint8_t reg_num)
{
uint8_t byte=0,command=0;
switch(reg_num)
{
case 1:
command=W25X_ReadStatusReg1; //To read status register 1
break;
case 2:
command=W25X_ReadStatusReg2; //To read status register 2
break;
case 3:
command=W25X_ReadStatusReg3; //To read status register 3
break;
default:
command=W25X_ReadStatusReg1;
break;
}
W25QXX_CS(0);
SPI2_ReadWriteByte(command); //send command
byte=SPI2_ReadWriteByte(0Xff); //read data
W25QXX_CS(1);
return byte;
}
//Write status registers of W25QXX
//reg_num: register number from 1 to 3
//d: data for updating status register
void W25QXX_Write_SR(uint8_t reg_num,uint8_t d)
{
uint8_t command=0;
switch(reg_num)
{
case 1:
command=W25X_WriteStatusReg1; //To write status register 1
break;
case 2:
command=W25X_WriteStatusReg2; //To write status register 2
break;
case 3:
command=W25X_WriteStatusReg3; //To write status register 3
break;
default:
command=W25X_WriteStatusReg1;
break;
}
W25QXX_CS(0);
SPI2_ReadWriteByte(command); //send command
SPI2_ReadWriteByte(d); //write data
W25QXX_CS(1);
}
//W25QXX write enable
void W25QXX_Write_Enable(void)
{
W25QXX_CS(0);
SPI2_ReadWriteByte(W25X_WriteEnable);
W25QXX_CS(1);
}
//W25QXX write disable
void W25QXX_Write_Disable(void)
{
W25QXX_CS(0);
SPI2_ReadWriteByte(W25X_WriteDisable);
W25QXX_CS(1);
}
//Read chip ID
//return:
//0XEF13 for W25Q80
//0XEF14 for W25Q16
//0XEF15 for W25Q32
//0XEF16 for W25Q64
//0XEF17 for W25Q128
//0XEF18 for W25Q256
uint16_t W25QXX_ReadID(void)
{
uint16_t Temp = 0;
W25QXX_CS(0);
SPI2_ReadWriteByte(0x90); //send command
SPI2_ReadWriteByte(0x00);
SPI2_ReadWriteByte(0x00);
SPI2_ReadWriteByte(0x00);
Temp|=SPI2_ReadWriteByte(0xFF)<<8; //read high byte data
Temp|=SPI2_ReadWriteByte(0xFF); //read low byte data
W25QXX_CS(1);
return Temp;
}
//Read W25QXX from specific address for specific byte length
//pBuffer: data buffer
//ReadAddr: specific address
//NumByteToRead: specific byte length (max 65535)
void W25QXX_Read(uint8_t* pBuffer,uint32_t ReadAddr,uint16_t NumByteToRead)
{
uint16_t i;
W25QXX_CS(0);
SPI2_ReadWriteByte(W25X_ReadData); //send read command
if((W25QXX_TYPE==W25Q256_ID)||(W25QXX_TYPE==W25Q512_ID)||(W25QXX_TYPE==W25Q1024_ID)) //send highest 8-bit address
{
SPI2_ReadWriteByte((uint8_t)((ReadAddr)>>24));
}
SPI2_ReadWriteByte((uint8_t)((ReadAddr)>>16)); //send 24-bit address
SPI2_ReadWriteByte((uint8_t)((ReadAddr)>>8));
SPI2_ReadWriteByte((uint8_t)ReadAddr);
for(i=0;i<NumByteToRead;i++)
{
pBuffer[i]=SPI2_ReadWriteByte(0XFF); //read data
}
W25QXX_CS(1);
}
//Write W25QXX not more than 1 page (256 bytes)
//pBuffer: data buffer
//WriteAddr: specific address
//NumByteToWrite: specific byte length (max 256)
void W25QXX_Write_Page(uint8_t* pBuffer,uint32_t WriteAddr,uint16_t NumByteToWrite)
{
uint16_t i;
W25QXX_Write_Enable(); //write enable
W25QXX_CS(0);
SPI2_ReadWriteByte(W25X_PageProgram); //send write command
if((W25QXX_TYPE==W25Q256_ID)||(W25QXX_TYPE==W25Q512_ID)||(W25QXX_TYPE==W25Q1024_ID)) //send highest 8-bit address
{
SPI2_ReadWriteByte((uint8_t)((WriteAddr)>>24));
}
SPI2_ReadWriteByte((uint8_t)((WriteAddr)>>16)); //send 24-bit address
SPI2_ReadWriteByte((uint8_t)((WriteAddr)>>8));
SPI2_ReadWriteByte((uint8_t)WriteAddr);
for(i=0;i<NumByteToWrite;i++)SPI2_ReadWriteByte(pBuffer[i]); //write data
W25QXX_CS(1);
W25QXX_Wait_Busy();
}
//Write W25QXX w/o erase check and w/o byte number restriction
//pBuffer: data buffer
//WriteAddr: specific address
//NumByteToWrite: specific byte length (max 65535)
void W25QXX_Write_NoCheck(uint8_t* pBuffer,uint32_t WriteAddr,uint16_t NumByteToWrite)
{
uint16_t remained_byte_num_in_page;
remained_byte_num_in_page=256-WriteAddr%256; //remained byte number in page
if( NumByteToWrite <= remained_byte_num_in_page ) remained_byte_num_in_page = NumByteToWrite; //data can be written in single page
while(1)
{
W25QXX_Write_Page(pBuffer,WriteAddr,remained_byte_num_in_page);
if(NumByteToWrite==remained_byte_num_in_page)break; //end write operation
else //NumByteToWrite>remained_byte_num_in_page
{
pBuffer+=remained_byte_num_in_page;
WriteAddr+=remained_byte_num_in_page;
NumByteToWrite-=remained_byte_num_in_page;
if(NumByteToWrite>256)remained_byte_num_in_page=256; //for whole page write
else remained_byte_num_in_page=NumByteToWrite; //for non-whole page write
}
};
}
//Write W25QXX w/ erase after check and w/o byte number restriction
//pBuffer: data buffer
//WriteAddr: specific address
//NumByteToWrite: specific byte length (max 65535)
uint8_t W25QXX_BUFFER[4096];
void W25QXX_Write(uint8_t* pBuffer,uint32_t WriteAddr,uint16_t NumByteToWrite)
{
uint32_t secpos;
uint16_t secoff;
uint16_t secremain;
uint16_t i;
uint8_t * W25QXX_BUF;
W25QXX_BUF=W25QXX_BUFFER;
secpos=WriteAddr/4096; //sector number (16 pages for 1 sector) for destination address
secoff=WriteAddr%4096; //offset address in sector for destination address
secremain=4096-secoff; //remained space for sector
if(NumByteToWrite<=secremain)secremain=NumByteToWrite; //data can be written in single sector
while(1)
{
W25QXX_Read(W25QXX_BUF,secpos*4096,4096); //read sector data for ease necessity judgment
for(i=0;i<secremain;i++) //check sector data status
{
if(W25QXX_BUF[secoff+i]!=0XFF) break; //ease necessary
}
if(i<secremain) //for ease
{
W25QXX_Erase_Sector(secpos); //ease sector
for(i=0;i<secremain;i++) //data copy
{
W25QXX_BUF[i+secoff]=pBuffer[i];
}
W25QXX_Write_NoCheck(W25QXX_BUF,secpos*4096,4096); //write sector
}
else W25QXX_Write_NoCheck(pBuffer,WriteAddr,secremain); //write data for sector unnecessary to erase
if(NumByteToWrite==secremain)break; //for operation end
else //for operation continuing
{
secpos++; //sector number + 1
secoff=0; //offset address from 0
pBuffer+=secremain; //pointer adjustment
WriteAddr+=secremain; //write address adjustment
NumByteToWrite-=secremain; //write number adjustment
if(NumByteToWrite>4096) secremain=4096; //not last sector
else secremain=NumByteToWrite; //last sector
}
};
}
//Erase whole chip, long waiting...
void W25QXX_Erase_Chip(void)
{
W25QXX_Write_Enable(); //write enable
W25QXX_Wait_Busy();
W25QXX_CS(0);
SPI2_ReadWriteByte(W25X_ChipErase); //send erase command
W25QXX_CS(1);
W25QXX_Wait_Busy(); //wait for erase complete
}
//Erase one sector
//Sector_Num: sector number
void W25QXX_Erase_Sector(uint32_t Sector_Num)
{
Sector_Num*=4096;
W25QXX_Write_Enable(); //write enable
W25QXX_Wait_Busy();
W25QXX_CS(0);
SPI2_ReadWriteByte(W25X_SectorErase); //send erase command
if((W25QXX_TYPE==W25Q256_ID)||(W25QXX_TYPE==W25Q512_ID)||(W25QXX_TYPE==W25Q1024_ID)) //send highest 8-bit address
{
SPI2_ReadWriteByte((uint8_t)((Sector_Num)>>24));
}
SPI2_ReadWriteByte((uint8_t)((Sector_Num)>>16)); //send 24-bit address
SPI2_ReadWriteByte((uint8_t)((Sector_Num)>>8));
SPI2_ReadWriteByte((uint8_t)Sector_Num);
W25QXX_CS(1);
W25QXX_Wait_Busy(); //wait for erase complete
}
//Wait idle status before next operation
void W25QXX_Wait_Busy(void)
{
while((W25QXX_ReadSR(1)&0x01)==0x01); //wait for busy flag cleared
}
//Enter power-down mode
#define tDP_us 3
void W25QXX_PowerDown(void)
{
W25QXX_CS(0);
SPI2_ReadWriteByte(W25X_PowerDown); //send power-down command
W25QXX_CS(1);
PY_Delay_us_t(tDP_us); //tDP
}
//Wake-up
#define tRES1_us 3
void W25QXX_WAKEUP(void)
{
W25QXX_CS(0);
SPI2_ReadWriteByte(W25X_ReleasePowerDown);//send release power-down command
W25QXX_CS(1);
PY_Delay_us_t(tRES1_us); //tRES1
}对ffconf.h添加包含信息:
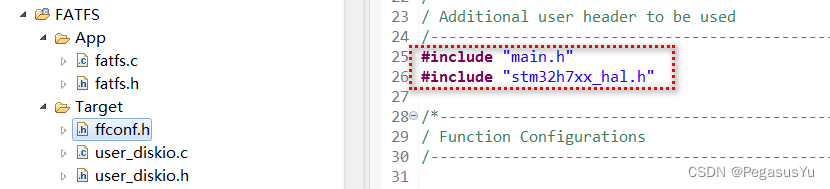
bash
#include "main.h"
#include "stm32h7xx_hal.h"修改user_diskio.c,对文件操作函数与底层FLASH读写提供连接:
bash
/* USER CODE BEGIN Header */
/**
******************************************************************************
* @file user_diskio.c
* @brief This file includes a diskio driver skeleton to be completed by the user.
******************************************************************************
* @attention
*
* Copyright (c) 2023 STMicroelectronics.
* All rights reserved.
*
* This software is licensed under terms that can be found in the LICENSE file
* in the root directory of this software component.
* If no LICENSE file comes with this software, it is provided AS-IS.
*
******************************************************************************
*/
/* USER CODE END Header */
#ifdef USE_OBSOLETE_USER_CODE_SECTION_0
/*
* Warning: the user section 0 is no more in use (starting from CubeMx version 4.16.0)
* To be suppressed in the future.
* Kept to ensure backward compatibility with previous CubeMx versions when
* migrating projects.
* User code previously added there should be copied in the new user sections before
* the section contents can be deleted.
*/
/* USER CODE BEGIN 0 */
/* USER CODE END 0 */
#endif
/* USER CODE BEGIN DECL */
/**************************SELF DEFINITION PART************/
#include "diskio.h" /* Declarations of disk functions */
#include "W25QXX.h"
/**********************************************************/
/* Includes ------------------------------------------------------------------*/
#include <string.h>
#include "ff_gen_drv.h"
/* Private typedef -----------------------------------------------------------*/
/* Private define ------------------------------------------------------------*/
/* Private variables ---------------------------------------------------------*/
/* Disk status */
static volatile DSTATUS Stat = STA_NOINIT;
/* USER CODE END DECL */
/* Private function prototypes -----------------------------------------------*/
DSTATUS USER_initialize (BYTE pdrv);
DSTATUS USER_status (BYTE pdrv);
DRESULT USER_read (BYTE pdrv, BYTE *buff, DWORD sector, UINT count);
#if _USE_WRITE == 1
DRESULT USER_write (BYTE pdrv, const BYTE *buff, DWORD sector, UINT count);
#endif /* _USE_WRITE == 1 */
#if _USE_IOCTL == 1
DRESULT USER_ioctl (BYTE pdrv, BYTE cmd, void *buff);
#endif /* _USE_IOCTL == 1 */
Diskio_drvTypeDef USER_Driver =
{
USER_initialize,
USER_status,
USER_read,
#if _USE_WRITE
USER_write,
#endif /* _USE_WRITE == 1 */
#if _USE_IOCTL == 1
USER_ioctl,
#endif /* _USE_IOCTL == 1 */
};
/* Private functions ---------------------------------------------------------*/
/**
* @brief Initializes a Drive
* @param pdrv: Physical drive number (0..)
* @retval DSTATUS: Operation status
*/
DSTATUS USER_initialize (
BYTE pdrv /* Physical drive nmuber to identify the drive */
)
{
/* USER CODE BEGIN INIT */
/**************************SELF DEFINITION PART************/
uint8_t res;
res = W25QXX_Init();
if(res) return RES_OK;
else return STA_NOINIT;
/**********************************************************/
/*
Stat = STA_NOINIT;
return Stat;
*/
/* USER CODE END INIT */
}
/**
* @brief Gets Disk Status
* @param pdrv: Physical drive number (0..)
* @retval DSTATUS: Operation status
*/
DSTATUS USER_status (
BYTE pdrv /* Physical drive number to identify the drive */
)
{
/* USER CODE BEGIN STATUS */
/**************************SELF DEFINITION PART************/
switch (pdrv)
{
case 0 :
return RES_OK;
case 1 :
return RES_OK;
case 2 :
return RES_OK;
default:
return STA_NOINIT;
}
/**********************************************************/
/*
Stat = STA_NOINIT;
return Stat;
*/
/* USER CODE END STATUS */
}
/**
* @brief Reads Sector(s)
* @param pdrv: Physical drive number (0..)
* @param *buff: Data buffer to store read data
* @param sector: Sector address (LBA)
* @param count: Number of sectors to read (1..128)
* @retval DRESULT: Operation result
*/
DRESULT USER_read (
BYTE pdrv, /* Physical drive nmuber to identify the drive */
BYTE *buff, /* Data buffer to store read data */
DWORD sector, /* Sector address in LBA */
UINT count /* Number of sectors to read */
)
{
/* USER CODE BEGIN READ */
/**************************SELF DEFINITION PART************/
uint16_t len;
if( !count )
{
return RES_PARERR; /* count不能等于0,否则返回参数错误 */
}
switch (pdrv)
{
case 0:
sector <<= 9; //Convert sector number to byte address
len = count*512;
W25QXX_Read(buff, sector, len);
return RES_OK;
default:
return RES_ERROR;
}
/**********************************************************/
/*
return RES_OK;
*/
/* USER CODE END READ */
}
/**
* @brief Writes Sector(s)
* @param pdrv: Physical drive number (0..)
* @param *buff: Data to be written
* @param sector: Sector address (LBA)
* @param count: Number of sectors to write (1..128)
* @retval DRESULT: Operation result
*/
#if _USE_WRITE == 1
DRESULT USER_write (
BYTE pdrv, /* Physical drive nmuber to identify the drive */
const BYTE *buff, /* Data to be written */
DWORD sector, /* Sector address in LBA */
UINT count /* Number of sectors to write */
)
{
/* USER CODE BEGIN WRITE */
/* USER CODE HERE */
/**************************SELF DEFINITION PART************/
uint16_t len;
if( !count )
{
return RES_PARERR; /* count不能等于0,否则返回参数错误 */
}
switch (pdrv)
{
case 0:
sector <<= 9; //Convert sector number to byte address
len = count*512;
W25QXX_Write((uint8_t *)buff, sector, len);
return RES_OK;
default:
return RES_ERROR;
}
/*********************************************************/
/*
return RES_OK;
*/
/* USER CODE END WRITE */
}
#endif /* _USE_WRITE == 1 */
/**
* @brief I/O control operation
* @param pdrv: Physical drive number (0..)
* @param cmd: Control code
* @param *buff: Buffer to send/receive control data
* @retval DRESULT: Operation result
*/
#if _USE_IOCTL == 1
DRESULT USER_ioctl (
BYTE pdrv, /* Physical drive nmuber (0..) */
BYTE cmd, /* Control code */
void *buff /* Buffer to send/receive control data */
)
{
/* USER CODE BEGIN IOCTL */
/**************************SELF DEFINITION PART************/
#define user_sector_byte_size 512
DRESULT res;
switch(cmd)
{
case CTRL_SYNC:
W25QXX_Wait_Busy();
res=RES_OK;
break;
case GET_SECTOR_SIZE:
*(WORD*)buff = user_sector_byte_size;
res = RES_OK;
break;
case GET_BLOCK_SIZE:
*(WORD*)buff = 4096/user_sector_byte_size;
res = RES_OK;
break;
case GET_SECTOR_COUNT:
W25QXX_TYPE=W25QXX_ReadID();
if(W25QXX_TYPE==W25Q80_ID) *(DWORD*)buff = (8*1024*1024/512);
else if(W25QXX_TYPE==W25Q16_ID) *(DWORD*)buff = (16*1024*1024/512);
else if(W25QXX_TYPE==W25Q32_ID) *(DWORD*)buff = (32*1024*1024/512);
else if(W25QXX_TYPE==W25Q64_ID) *(DWORD*)buff = (64*1024*1024/512);
else if(W25QXX_TYPE==W25Q128_ID) *(DWORD*)buff = (128*1024*1024/512);
else if(W25QXX_TYPE==W25Q256_ID) *(DWORD*)buff = (256*1024*1024/512);
else if(W25QXX_TYPE==W25Q512_ID) *(DWORD*)buff = (512*1024*1024/512);
else if(W25QXX_TYPE==W25Q1024_ID) *(DWORD*)buff = (1024*1024*1024/512);
else *(DWORD*)buff = (8*1024*1024/512);
res = RES_OK;
break;
default:
res = RES_PARERR;
break;
}
return res;
/**********************************************************/
/*
DRESULT res = RES_ERROR;
return res;
*/
/* USER CODE END IOCTL */
}
#endif /* _USE_IOCTL == 1 */上面配置的FATS协议是用户可操作的显式协议,譬如本例程通过串口发送指令后控制对FLASH的FATS操作。STM32的U盘接口相当于包含对PC端的握手协议和对内部的隐式FATS协议,还需要配置底层对针对的存储单元读写操作函数。
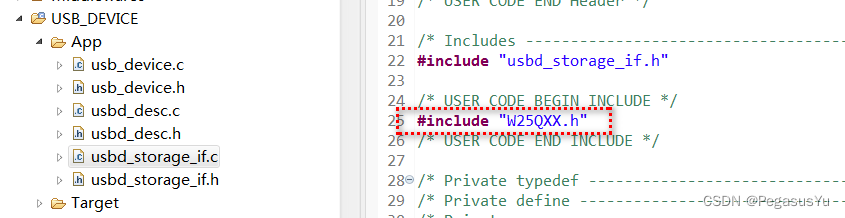
配置U盘接口包含如下部分:
引入头文件申明
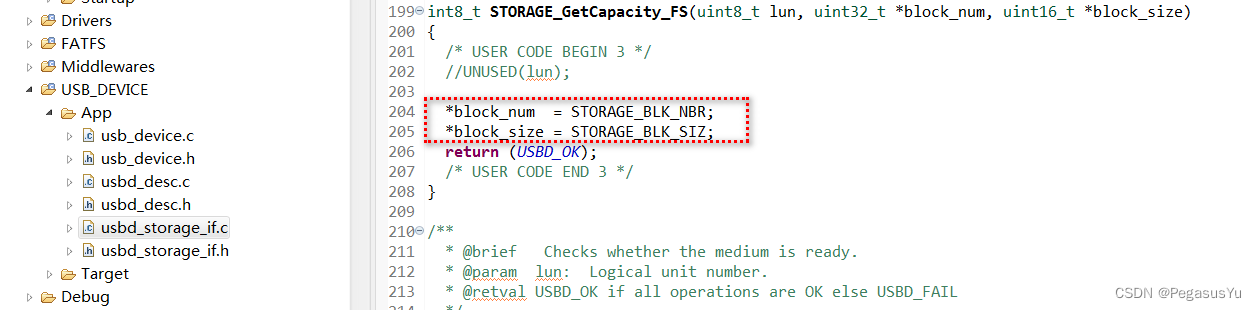
设置U盘识别的大小参数:
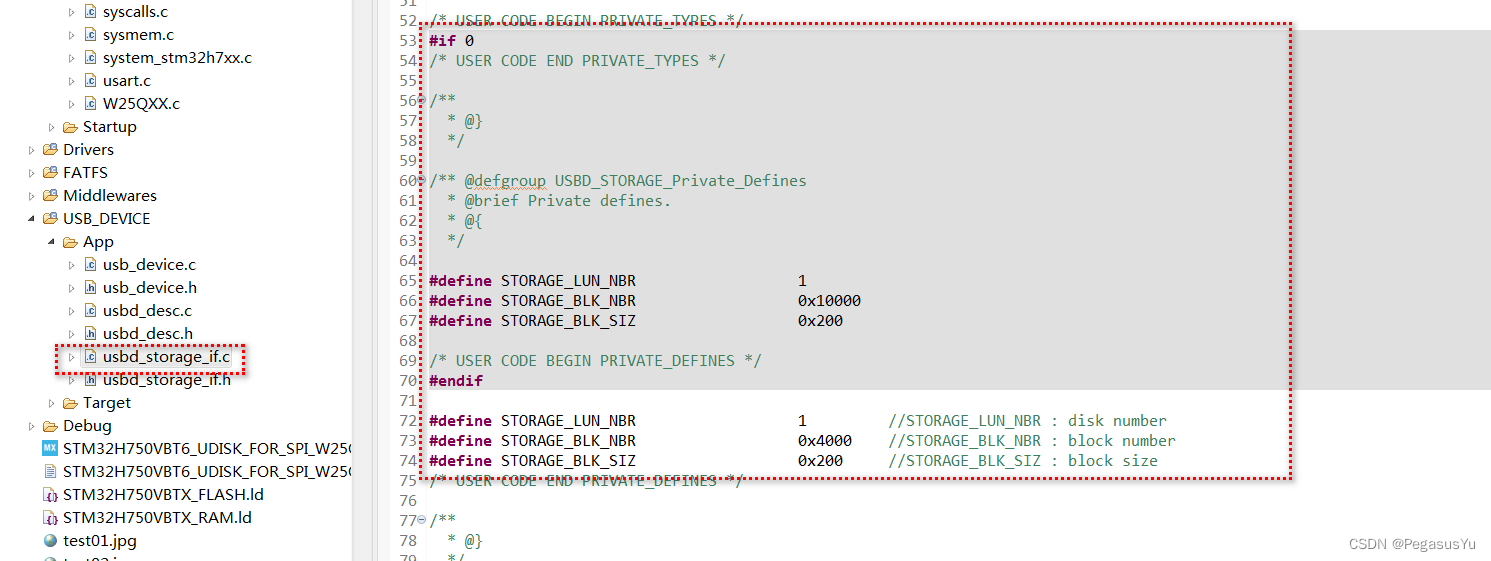
这里0x4000对应16K,0x200对应512(字节), 16K*512=8M, 所以U盘会识别为8MB的U盘。
然后是U盘初始化的设置
U盘识别时获取U盘容量的函数
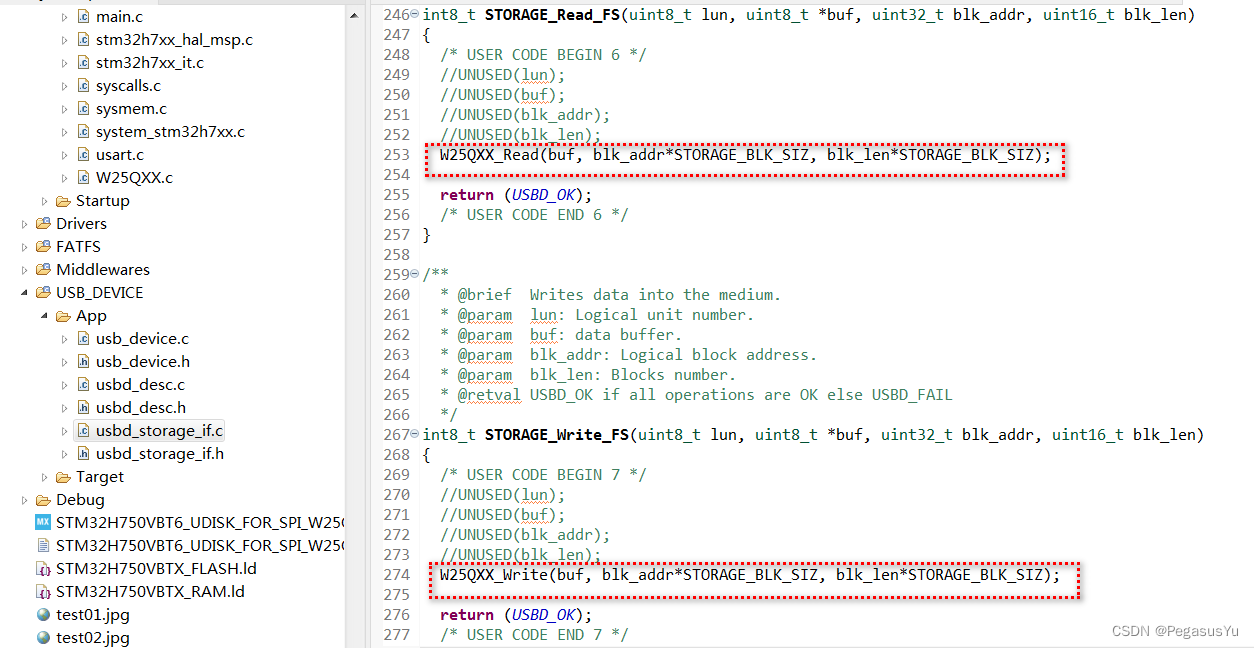
然后再配置读操作和写操作函数
完整的代码如下:
bash
/* USER CODE BEGIN Header */
/**
******************************************************************************
* @file : usbd_storage_if.c
* @version : v1.0_Cube
* @brief : Memory management layer.
******************************************************************************
* @attention
*
* Copyright (c) 2023 STMicroelectronics.
* All rights reserved.
*
* This software is licensed under terms that can be found in the LICENSE file
* in the root directory of this software component.
* If no LICENSE file comes with this software, it is provided AS-IS.
*
******************************************************************************
*/
/* USER CODE END Header */
/* Includes ------------------------------------------------------------------*/
#include "usbd_storage_if.h"
/* USER CODE BEGIN INCLUDE */
#include "W25QXX.h"
/* USER CODE END INCLUDE */
/* Private typedef -----------------------------------------------------------*/
/* Private define ------------------------------------------------------------*/
/* Private macro -------------------------------------------------------------*/
/* USER CODE BEGIN PV */
/* Private variables ---------------------------------------------------------*/
/* USER CODE END PV */
/** @addtogroup STM32_USB_OTG_DEVICE_LIBRARY
* @brief Usb device.
* @{
*/
/** @defgroup USBD_STORAGE
* @brief Usb mass storage device module
* @{
*/
/** @defgroup USBD_STORAGE_Private_TypesDefinitions
* @brief Private types.
* @{
*/
/* USER CODE BEGIN PRIVATE_TYPES */
#if 0
/* USER CODE END PRIVATE_TYPES */
/**
* @}
*/
/** @defgroup USBD_STORAGE_Private_Defines
* @brief Private defines.
* @{
*/
#define STORAGE_LUN_NBR 1
#define STORAGE_BLK_NBR 0x10000
#define STORAGE_BLK_SIZ 0x200
/* USER CODE BEGIN PRIVATE_DEFINES */
#endif
#define STORAGE_LUN_NBR 1 //STORAGE_LUN_NBR : disk number
#define STORAGE_BLK_NBR 0x4000 //STORAGE_BLK_NBR : block number
#define STORAGE_BLK_SIZ 0x200 //STORAGE_BLK_SIZ : block size
/* USER CODE END PRIVATE_DEFINES */
/**
* @}
*/
/** @defgroup USBD_STORAGE_Private_Macros
* @brief Private macros.
* @{
*/
/* USER CODE BEGIN PRIVATE_MACRO */
/* USER CODE END PRIVATE_MACRO */
/**
* @}
*/
/** @defgroup USBD_STORAGE_Private_Variables
* @brief Private variables.
* @{
*/
/* USER CODE BEGIN INQUIRY_DATA_FS */
/** USB Mass storage Standard Inquiry Data. */
const int8_t STORAGE_Inquirydata_FS[] = {/* 36 */
/* LUN 0 */
0x00,
0x80,
0x02,
0x02,
(STANDARD_INQUIRY_DATA_LEN - 5),
0x00,
0x00,
0x00,
'S', 'T', 'M', ' ', ' ', ' ', ' ', ' ', /* Manufacturer : 8 bytes */
'P', 'r', 'o', 'd', 'u', 'c', 't', ' ', /* Product : 16 Bytes */
' ', ' ', ' ', ' ', ' ', ' ', ' ', ' ',
'0', '.', '0' ,'1' /* Version : 4 Bytes */
};
/* USER CODE END INQUIRY_DATA_FS */
/* USER CODE BEGIN PRIVATE_VARIABLES */
/* USER CODE END PRIVATE_VARIABLES */
/**
* @}
*/
/** @defgroup USBD_STORAGE_Exported_Variables
* @brief Public variables.
* @{
*/
extern USBD_HandleTypeDef hUsbDeviceFS;
/* USER CODE BEGIN EXPORTED_VARIABLES */
/* USER CODE END EXPORTED_VARIABLES */
/**
* @}
*/
/** @defgroup USBD_STORAGE_Private_FunctionPrototypes
* @brief Private functions declaration.
* @{
*/
static int8_t STORAGE_Init_FS(uint8_t lun);
static int8_t STORAGE_GetCapacity_FS(uint8_t lun, uint32_t *block_num, uint16_t *block_size);
static int8_t STORAGE_IsReady_FS(uint8_t lun);
static int8_t STORAGE_IsWriteProtected_FS(uint8_t lun);
static int8_t STORAGE_Read_FS(uint8_t lun, uint8_t *buf, uint32_t blk_addr, uint16_t blk_len);
static int8_t STORAGE_Write_FS(uint8_t lun, uint8_t *buf, uint32_t blk_addr, uint16_t blk_len);
static int8_t STORAGE_GetMaxLun_FS(void);
/* USER CODE BEGIN PRIVATE_FUNCTIONS_DECLARATION */
/* USER CODE END PRIVATE_FUNCTIONS_DECLARATION */
/**
* @}
*/
USBD_StorageTypeDef USBD_Storage_Interface_fops_FS =
{
STORAGE_Init_FS,
STORAGE_GetCapacity_FS,
STORAGE_IsReady_FS,
STORAGE_IsWriteProtected_FS,
STORAGE_Read_FS,
STORAGE_Write_FS,
STORAGE_GetMaxLun_FS,
(int8_t *)STORAGE_Inquirydata_FS
};
/* Private functions ---------------------------------------------------------*/
/**
* @brief Initializes the storage unit (medium) over USB FS IP
* @param lun: Logical unit number.
* @retval USBD_OK if all operations are OK else USBD_FAIL
*/
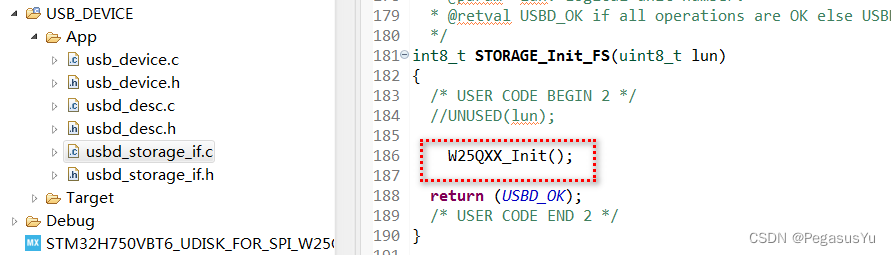
int8_t STORAGE_Init_FS(uint8_t lun)
{
/* USER CODE BEGIN 2 */
//UNUSED(lun);
W25QXX_Init();
return (USBD_OK);
/* USER CODE END 2 */
}
/**
* @brief Returns the medium capacity.
* @param lun: Logical unit number.
* @param block_num: Number of total block number.
* @param block_size: Block size.
* @retval USBD_OK if all operations are OK else USBD_FAIL
*/
int8_t STORAGE_GetCapacity_FS(uint8_t lun, uint32_t *block_num, uint16_t *block_size)
{
/* USER CODE BEGIN 3 */
//UNUSED(lun);
*block_num = STORAGE_BLK_NBR;
*block_size = STORAGE_BLK_SIZ;
return (USBD_OK);
/* USER CODE END 3 */
}
/**
* @brief Checks whether the medium is ready.
* @param lun: Logical unit number.
* @retval USBD_OK if all operations are OK else USBD_FAIL
*/
int8_t STORAGE_IsReady_FS(uint8_t lun)
{
/* USER CODE BEGIN 4 */
//UNUSED(lun);
return (USBD_OK);
/* USER CODE END 4 */
}
/**
* @brief Checks whether the medium is write protected.
* @param lun: Logical unit number.
* @retval USBD_OK if all operations are OK else USBD_FAIL
*/
int8_t STORAGE_IsWriteProtected_FS(uint8_t lun)
{
/* USER CODE BEGIN 5 */
//UNUSED(lun);
return (USBD_OK);
/* USER CODE END 5 */
}
/**
* @brief Reads data from the medium.
* @param lun: Logical unit number.
* @param buf: data buffer.
* @param blk_addr: Logical block address.
* @param blk_len: Blocks number.
* @retval USBD_OK if all operations are OK else USBD_FAIL
*/
int8_t STORAGE_Read_FS(uint8_t lun, uint8_t *buf, uint32_t blk_addr, uint16_t blk_len)
{
/* USER CODE BEGIN 6 */
//UNUSED(lun);
//UNUSED(buf);
//UNUSED(blk_addr);
//UNUSED(blk_len);
W25QXX_Read(buf, blk_addr*STORAGE_BLK_SIZ, blk_len*STORAGE_BLK_SIZ);
return (USBD_OK);
/* USER CODE END 6 */
}
/**
* @brief Writes data into the medium.
* @param lun: Logical unit number.
* @param buf: data buffer.
* @param blk_addr: Logical block address.
* @param blk_len: Blocks number.
* @retval USBD_OK if all operations are OK else USBD_FAIL
*/
int8_t STORAGE_Write_FS(uint8_t lun, uint8_t *buf, uint32_t blk_addr, uint16_t blk_len)
{
/* USER CODE BEGIN 7 */
//UNUSED(lun);
//UNUSED(buf);
//UNUSED(blk_addr);
//UNUSED(blk_len);
W25QXX_Write(buf, blk_addr*STORAGE_BLK_SIZ, blk_len*STORAGE_BLK_SIZ);
return (USBD_OK);
/* USER CODE END 7 */
}
/**
* @brief Returns the Max Supported LUNs.
* @param None
* @retval Lun(s) number.
*/
int8_t STORAGE_GetMaxLun_FS(void)
{
/* USER CODE BEGIN 8 */
return (STORAGE_LUN_NBR - 1);
/* USER CODE END 8 */
}
/* USER CODE BEGIN PRIVATE_FUNCTIONS_IMPLEMENTATION */
/* USER CODE END PRIVATE_FUNCTIONS_IMPLEMENTATION */
/**
* @}
*/
/**
* @}
*/(番外)由上面的设置可以看出设计扩容盘的方式,如把8M的盘扩容成64M,则进行两步操作即可:
- 将STORAGE_BLK_NBR放大8倍从而盘容量识别扩大为64M
- 在读写函数里,对操作地址进行处理,即把操作地址对8M空间取余,这样刚过8M尾部空间的操作就会跳到头部空间进行,当然如果是写操作就会产生覆盖
扩容盘是一种循环访问非常规方式,一般在行车记录仪等监控领域出现较多,用户想存储更长时间的数据,但实际上要查数据时都是近期数据,扩容盘能够保持对近期数据的记录,因此不良商家卖出扩容盘非法牟利。扩容盘的缺点是实际容量小于标称容量,要查远期数据是被覆盖丢失的,另一个缺点是如果一个文件正好存储时跨过了实际容量尾部,那么这个文件对PC端时损坏文件不能读取,如果正好这个近期文件是重要取证文件,则是不良事件。
然后在main.c里根据串口输入命令(16进制单字节)实现如下功能:
0x01. 读取FLASH ID
0x02. 装载FATS文件系统
0x03: 创建/打开文件并从头位置写入数据
0x04: 打开文件并从头位置读入数据
0x05: 创建/打开文件并从特定位置写入数据
0x06: 打开文件并从特定位置读入数据
完整的代码实现如下:
bash
/* USER CODE BEGIN Header */
/**
******************************************************************************
* @file : main.c
* @brief : Main program body
******************************************************************************
* @attention
*
* Copyright (c) 2023 STMicroelectronics.
* All rights reserved.
*
* This software is licensed under terms that can be found in the LICENSE file
* in the root directory of this software component.
* If no LICENSE file comes with this software, it is provided AS-IS.
*
******************************************************************************
*/
//Written by Pegasus Yu in 2023
/* USER CODE END Header */
/* Includes ------------------------------------------------------------------*/
#include "main.h"
#include "fatfs.h"
#include "usb_device.h"
/* Private includes ----------------------------------------------------------*/
/* USER CODE BEGIN Includes */
#include "usart.h"
#include "W25QXX.h"
#include <string.h>
/* USER CODE END Includes */
/* Private typedef -----------------------------------------------------------*/
/* USER CODE BEGIN PTD */
__IO float usDelayBase;
void PY_usDelayTest(void)
{
__IO uint32_t firstms, secondms;
__IO uint32_t counter = 0;
firstms = HAL_GetTick()+1;
secondms = firstms+1;
while(uwTick!=firstms) ;
while(uwTick!=secondms) counter++;
usDelayBase = ((float)counter)/1000;
}
void PY_Delay_us_t(uint32_t Delay)
{
__IO uint32_t delayReg;
__IO uint32_t usNum = (uint32_t)(Delay*usDelayBase);
delayReg = 0;
while(delayReg!=usNum) delayReg++;
}
void PY_usDelayOptimize(void)
{
__IO uint32_t firstms, secondms;
__IO float coe = 1.0;
firstms = HAL_GetTick();
PY_Delay_us_t(1000000) ;
secondms = HAL_GetTick();
coe = ((float)1000)/(secondms-firstms);
usDelayBase = coe*usDelayBase;
}
void PY_Delay_us(uint32_t Delay)
{
__IO uint32_t delayReg;
__IO uint32_t msNum = Delay/1000;
__IO uint32_t usNum = (uint32_t)((Delay%1000)*usDelayBase);
if(msNum>0) HAL_Delay(msNum);
delayReg = 0;
while(delayReg!=usNum) delayReg++;
}
/* USER CODE END PTD */
/* Private define ------------------------------------------------------------*/
/* USER CODE BEGIN PD */
/* USER CODE END PD */
/* Private macro -------------------------------------------------------------*/
/* USER CODE BEGIN PM */
/* USER CODE END PM */
/* Private variables ---------------------------------------------------------*/
SPI_HandleTypeDef hspi2;
UART_HandleTypeDef huart1;
/* USER CODE BEGIN PV */
uint8_t uart1_rx[16];
uint8_t cmd;
uint8_t Flash_mount_status = 0; //FLASH fats mount status indication (0: unmount; 1: mount)
uint8_t FATS_Buff[_MAX_SS]; //Buffer for f_mkfs() operation
FRESULT retFLASH;
FIL file;
FATFS *fs;
UINT bytesread;
UINT byteswritten;
uint8_t rBuffer[20]; //Buffer for read
uint8_t WBuffer[20] ={1,2,3,4,5,6,7,8,9,10,11,12,13,14,15,16,17,18,19,20}; //Buffer for write
#define user_sector_byte_size 512
uint8_t flashbuffer[user_sector_byte_size];
extern char USERPath[4];
/* USER CODE END PV */
/* Private function prototypes -----------------------------------------------*/
void SystemClock_Config(void);
void PeriphCommonClock_Config(void);
static void MX_GPIO_Init(void);
static void MX_USART1_UART_Init(void);
static void MX_SPI2_Init(void);
/* USER CODE BEGIN PFP */
/* USER CODE END PFP */
/* Private user code ---------------------------------------------------------*/
/* USER CODE BEGIN 0 */
/* USER CODE END 0 */
/**
* @brief The application entry point.
* @retval int
*/
int main(void)
{
/* USER CODE BEGIN 1 */
Flash_mount_status = 0;
uint32_t FLASH_Read_Size;
char * dpath = "0:"; //Disk Path
for(uint8_t i=0; i<4; i++)
{
USERPath[i] = *(dpath+i);
}
const TCHAR* filepath = "0:test.txt";
/* USER CODE END 1 */
/* MCU Configuration--------------------------------------------------------*/
/* Reset of all peripherals, Initializes the Flash interface and the Systick. */
HAL_Init();
/* USER CODE BEGIN Init */
/* USER CODE END Init */
/* Configure the system clock */
SystemClock_Config();
/* Configure the peripherals common clocks */
PeriphCommonClock_Config();
/* USER CODE BEGIN SysInit */
/* USER CODE END SysInit */
/* Initialize all configured peripherals */
MX_GPIO_Init();
MX_USART1_UART_Init();
MX_SPI2_Init();
MX_FATFS_Init();
MX_USB_DEVICE_Init();
/* USER CODE BEGIN 2 */
PY_usDelayTest();
PY_usDelayOptimize();
HAL_UART_Receive_IT(&huart1, uart1_rx, 1);
W25QXX_Init();
/* USER CODE END 2 */
/* Infinite loop */
/* USER CODE BEGIN WHILE */
while (1)
{
if(cmd==1) //Read ID
{
cmd = 0;
printf("FLASH ID=0x%x\r\n\r\n", W25QXX_ReadID());
printf("W25Q80_ID: 0XEF13\r\n");
printf("W25Q16_ID: 0XEF14\r\n");
printf("W25Q32_ID: 0XEF15\r\n");
printf("W25Q64_ID: 0XEF16\r\n");
printf("W25Q128_ID: 0XEF17\r\n");
printf("W25Q256_ID: 0XEF18\r\n");
printf("W25Q512_ID: 0XEF18\r\n");
printf("W25Q1024_ID: 0XEF20\r\n");
}
else if(cmd==2) //Flash File System Mount
{
cmd = 0;
retFLASH=f_mount(&USERFatFS, (TCHAR const*)USERPath, 1);
if (retFLASH != FR_OK)
{
printf("File system mount failure: %d\r\n", retFLASH);
if(retFLASH==FR_NO_FILESYSTEM)
{
printf("No file system. Now to format......\r\n");
retFLASH = f_mkfs((TCHAR const*)USERPath, FM_FAT, 1024, FATS_Buff, sizeof(FATS_Buff)); //FLASH formatting
if(retFLASH == FR_OK)
{
printf("FLASH formatting success!\r\n");
}
else
{
printf("FLASH formatting failure!\r\n");
}
}
}
else
{
Flash_mount_status = 1;
printf("File system mount success\r\n");
}
}
else if(cmd==3) //File creation and write
{
cmd = 0;
if(Flash_mount_status==0) printf("\r\nFLASH File system not mounted: %d\r\n",retFLASH);
else
{
retFLASH = f_open( &file, filepath, FA_CREATE_ALWAYS | FA_WRITE ); //Open or create file
if(retFLASH == FR_OK)
{
printf("\r\nFile open or creation successful\r\n");
retFLASH = f_write( &file, (const void *)WBuffer, sizeof(WBuffer), &byteswritten); //Write data
if(retFLASH == FR_OK)
{
printf("\r\nFile write successful\r\n");
}
else
{
printf("\r\nFile write error: %d\r\n",retFLASH);
}
f_close(&file); //Close file
}
else
{
printf("\r\nFile open or creation error %d\r\n",retFLASH);
}
}
}
else if(cmd==4) //File read
{
cmd = 0;
if(Flash_mount_status==0) printf("\r\nFLASH File system not mounted: %d\r\n",retFLASH);
else
{
retFLASH = f_open( &file, filepath, FA_OPEN_EXISTING | FA_READ); //Open file
if(retFLASH == FR_OK)
{
printf("\r\nFile open successful\r\n");
retFLASH = f_read( &file, (void *)rBuffer, sizeof(rBuffer), &bytesread); //Read data
if(retFLASH == FR_OK)
{
printf("\r\nFile read successful\r\n");
PY_Delay_us_t(200000);
FLASH_Read_Size = sizeof(rBuffer);
for(uint16_t i = 0;i < FLASH_Read_Size;i++)
{
printf("%d ", rBuffer[i]);
}
printf("\r\n");
}
else
{
printf("\r\nFile read error: %d\r\n", retFLASH);
}
f_close(&file); //Close file
}
else
{
printf("\r\nFile open error: %d\r\n", retFLASH);
}
}
}
else if(cmd==5) //File locating write
{
cmd = 0;
if(Flash_mount_status==0) printf("\r\nFLASH File system not mounted: %d\r\n",retFLASH);
else
{
retFLASH = f_open( &file, filepath, FA_CREATE_ALWAYS | FA_WRITE); //Open or create file
if(retFLASH == FR_OK)
{
printf("\r\nFile open or creation successful\r\n");
retFLASH=f_lseek( &file, f_tell(&file) + sizeof(WBuffer) ); //move file operation pointer, f_tell(&file) gets file head locating
if(retFLASH == FR_OK)
{
retFLASH = f_write( &file, (const void *)WBuffer, sizeof(WBuffer), &byteswritten);
if(retFLASH == FR_OK)
{
printf("\r\nFile locating write successful\r\n");
}
else
{
printf("\r\nFile locating write error: %d\r\n", retFLASH);
}
}
else
{
printf("\r\nFile pointer error: %d\r\n",retFLASH);
}
f_close(&file); //Close file
}
else
{
printf("\r\nFile open or creation error %d\r\n",retFLASH);
}
}
}
else if(cmd==6) //File locating read
{
cmd = 0;
if(Flash_mount_status==0) printf("\r\nFLASH File system not mounted: %d\r\n",retFLASH);
else
{
retFLASH = f_open(&file, filepath, FA_OPEN_EXISTING | FA_READ); //Open file
if(retFLASH == FR_OK)
{
printf("\r\nFile open successful\r\n");
retFLASH = f_lseek(&file,f_tell(&file)+ sizeof(WBuffer)/2); //move file operation pointer, f_tell(&file) gets file head locating
if(retFLASH == FR_OK)
{
retFLASH = f_read( &file, (void *)rBuffer, sizeof(rBuffer), &bytesread);
if(retFLASH == FR_OK)
{
printf("\r\nFile locating read successful\r\n");
PY_Delay_us_t(200000);
FLASH_Read_Size = sizeof(rBuffer);
for(uint16_t i = 0;i < FLASH_Read_Size;i++)
{
printf("%d ",rBuffer[i]);
}
printf("\r\n");
}
else
{
printf("\r\nFile locating read error: %d\r\n",retFLASH);
}
}
else
{
printf("\r\nFile pointer error: %d\r\n",retFLASH);
}
f_close(&file);
}
else
{
printf("\r\nFile open error: %d\r\n",retFLASH);
}
}
}
/* USER CODE END WHILE */
/* USER CODE BEGIN 3 */
}
/* USER CODE END 3 */
}
/**
* @brief System Clock Configuration
* @retval None
*/
void SystemClock_Config(void)
{
RCC_OscInitTypeDef RCC_OscInitStruct = {0};
RCC_ClkInitTypeDef RCC_ClkInitStruct = {0};
/** Supply configuration update enable
*/
HAL_PWREx_ConfigSupply(PWR_LDO_SUPPLY);
/** Configure the main internal regulator output voltage
*/
__HAL_PWR_VOLTAGESCALING_CONFIG(PWR_REGULATOR_VOLTAGE_SCALE1);
while(!__HAL_PWR_GET_FLAG(PWR_FLAG_VOSRDY)) {}
__HAL_RCC_SYSCFG_CLK_ENABLE();
__HAL_PWR_VOLTAGESCALING_CONFIG(PWR_REGULATOR_VOLTAGE_SCALE0);
while(!__HAL_PWR_GET_FLAG(PWR_FLAG_VOSRDY)) {}
/** Initializes the RCC Oscillators according to the specified parameters
* in the RCC_OscInitTypeDef structure.
*/
RCC_OscInitStruct.OscillatorType = RCC_OSCILLATORTYPE_HSI48|RCC_OSCILLATORTYPE_HSI;
RCC_OscInitStruct.HSIState = RCC_HSI_DIV1;
RCC_OscInitStruct.HSICalibrationValue = RCC_HSICALIBRATION_DEFAULT;
RCC_OscInitStruct.HSI48State = RCC_HSI48_ON;
RCC_OscInitStruct.PLL.PLLState = RCC_PLL_ON;
RCC_OscInitStruct.PLL.PLLSource = RCC_PLLSOURCE_HSI;
RCC_OscInitStruct.PLL.PLLM = 4;
RCC_OscInitStruct.PLL.PLLN = 60;
RCC_OscInitStruct.PLL.PLLP = 2;
RCC_OscInitStruct.PLL.PLLQ = 2;
RCC_OscInitStruct.PLL.PLLR = 2;
RCC_OscInitStruct.PLL.PLLRGE = RCC_PLL1VCIRANGE_3;
RCC_OscInitStruct.PLL.PLLVCOSEL = RCC_PLL1VCOWIDE;
RCC_OscInitStruct.PLL.PLLFRACN = 0;
if (HAL_RCC_OscConfig(&RCC_OscInitStruct) != HAL_OK)
{
Error_Handler();
}
/** Initializes the CPU, AHB and APB buses clocks
*/
RCC_ClkInitStruct.ClockType = RCC_CLOCKTYPE_HCLK|RCC_CLOCKTYPE_SYSCLK
|RCC_CLOCKTYPE_PCLK1|RCC_CLOCKTYPE_PCLK2
|RCC_CLOCKTYPE_D3PCLK1|RCC_CLOCKTYPE_D1PCLK1;
RCC_ClkInitStruct.SYSCLKSource = RCC_SYSCLKSOURCE_PLLCLK;
RCC_ClkInitStruct.SYSCLKDivider = RCC_SYSCLK_DIV1;
RCC_ClkInitStruct.AHBCLKDivider = RCC_HCLK_DIV2;
RCC_ClkInitStruct.APB3CLKDivider = RCC_APB3_DIV2;
RCC_ClkInitStruct.APB1CLKDivider = RCC_APB1_DIV2;
RCC_ClkInitStruct.APB2CLKDivider = RCC_APB2_DIV2;
RCC_ClkInitStruct.APB4CLKDivider = RCC_APB4_DIV2;
if (HAL_RCC_ClockConfig(&RCC_ClkInitStruct, FLASH_LATENCY_4) != HAL_OK)
{
Error_Handler();
}
}
/**
* @brief Peripherals Common Clock Configuration
* @retval None
*/
void PeriphCommonClock_Config(void)
{
RCC_PeriphCLKInitTypeDef PeriphClkInitStruct = {0};
/** Initializes the peripherals clock
*/
PeriphClkInitStruct.PeriphClockSelection = RCC_PERIPHCLK_CKPER;
PeriphClkInitStruct.CkperClockSelection = RCC_CLKPSOURCE_HSI;
if (HAL_RCCEx_PeriphCLKConfig(&PeriphClkInitStruct) != HAL_OK)
{
Error_Handler();
}
}
/**
* @brief SPI2 Initialization Function
* @param None
* @retval None
*/
static void MX_SPI2_Init(void)
{
/* USER CODE BEGIN SPI2_Init 0 */
/* USER CODE END SPI2_Init 0 */
/* USER CODE BEGIN SPI2_Init 1 */
/* USER CODE END SPI2_Init 1 */
/* SPI2 parameter configuration*/
hspi2.Instance = SPI2;
hspi2.Init.Mode = SPI_MODE_MASTER;
hspi2.Init.Direction = SPI_DIRECTION_2LINES;
hspi2.Init.DataSize = SPI_DATASIZE_8BIT;
hspi2.Init.CLKPolarity = SPI_POLARITY_LOW;
hspi2.Init.CLKPhase = SPI_PHASE_1EDGE;
hspi2.Init.NSS = SPI_NSS_SOFT;
hspi2.Init.BaudRatePrescaler = SPI_BAUDRATEPRESCALER_2;
hspi2.Init.FirstBit = SPI_FIRSTBIT_MSB;
hspi2.Init.TIMode = SPI_TIMODE_DISABLE;
hspi2.Init.CRCCalculation = SPI_CRCCALCULATION_DISABLE;
hspi2.Init.CRCPolynomial = 0x0;
hspi2.Init.NSSPMode = SPI_NSS_PULSE_ENABLE;
hspi2.Init.NSSPolarity = SPI_NSS_POLARITY_LOW;
hspi2.Init.FifoThreshold = SPI_FIFO_THRESHOLD_01DATA;
hspi2.Init.TxCRCInitializationPattern = SPI_CRC_INITIALIZATION_ALL_ZERO_PATTERN;
hspi2.Init.RxCRCInitializationPattern = SPI_CRC_INITIALIZATION_ALL_ZERO_PATTERN;
hspi2.Init.MasterSSIdleness = SPI_MASTER_SS_IDLENESS_00CYCLE;
hspi2.Init.MasterInterDataIdleness = SPI_MASTER_INTERDATA_IDLENESS_00CYCLE;
hspi2.Init.MasterReceiverAutoSusp = SPI_MASTER_RX_AUTOSUSP_DISABLE;
hspi2.Init.MasterKeepIOState = SPI_MASTER_KEEP_IO_STATE_DISABLE;
hspi2.Init.IOSwap = SPI_IO_SWAP_DISABLE;
if (HAL_SPI_Init(&hspi2) != HAL_OK)
{
Error_Handler();
}
/* USER CODE BEGIN SPI2_Init 2 */
/* USER CODE END SPI2_Init 2 */
}
/**
* @brief USART1 Initialization Function
* @param None
* @retval None
*/
static void MX_USART1_UART_Init(void)
{
/* USER CODE BEGIN USART1_Init 0 */
/* USER CODE END USART1_Init 0 */
/* USER CODE BEGIN USART1_Init 1 */
/* USER CODE END USART1_Init 1 */
huart1.Instance = USART1;
huart1.Init.BaudRate = 115200;
huart1.Init.WordLength = UART_WORDLENGTH_8B;
huart1.Init.StopBits = UART_STOPBITS_1;
huart1.Init.Parity = UART_PARITY_NONE;
huart1.Init.Mode = UART_MODE_TX_RX;
huart1.Init.HwFlowCtl = UART_HWCONTROL_NONE;
huart1.Init.OverSampling = UART_OVERSAMPLING_16;
huart1.Init.OneBitSampling = UART_ONE_BIT_SAMPLE_DISABLE;
huart1.Init.ClockPrescaler = UART_PRESCALER_DIV1;
huart1.AdvancedInit.AdvFeatureInit = UART_ADVFEATURE_NO_INIT;
if (HAL_UART_Init(&huart1) != HAL_OK)
{
Error_Handler();
}
if (HAL_UARTEx_SetTxFifoThreshold(&huart1, UART_TXFIFO_THRESHOLD_1_8) != HAL_OK)
{
Error_Handler();
}
if (HAL_UARTEx_SetRxFifoThreshold(&huart1, UART_RXFIFO_THRESHOLD_1_8) != HAL_OK)
{
Error_Handler();
}
if (HAL_UARTEx_DisableFifoMode(&huart1) != HAL_OK)
{
Error_Handler();
}
/* USER CODE BEGIN USART1_Init 2 */
/* USER CODE END USART1_Init 2 */
}
/**
* @brief GPIO Initialization Function
* @param None
* @retval None
*/
static void MX_GPIO_Init(void)
{
GPIO_InitTypeDef GPIO_InitStruct = {0};
/* GPIO Ports Clock Enable */
__HAL_RCC_GPIOB_CLK_ENABLE();
__HAL_RCC_GPIOA_CLK_ENABLE();
/*Configure GPIO pin Output Level */
HAL_GPIO_WritePin(GPIOB, GPIO_PIN_12, GPIO_PIN_SET);
/*Configure GPIO pin : PB12 */
GPIO_InitStruct.Pin = GPIO_PIN_12;
GPIO_InitStruct.Mode = GPIO_MODE_OUTPUT_PP;
GPIO_InitStruct.Pull = GPIO_NOPULL;
GPIO_InitStruct.Speed = GPIO_SPEED_FREQ_VERY_HIGH;
HAL_GPIO_Init(GPIOB, &GPIO_InitStruct);
}
/* USER CODE BEGIN 4 */
void HAL_UART_RxCpltCallback(UART_HandleTypeDef *huart)
{
if(huart==&huart1)
{
cmd = uart1_rx[0];
HAL_UART_Receive_IT(&huart1, uart1_rx, 1);
}
}
/* USER CODE END 4 */
/**
* @brief This function is executed in case of error occurrence.
* @retval None
*/
void Error_Handler(void)
{
/* USER CODE BEGIN Error_Handler_Debug */
/* User can add his own implementation to report the HAL error return state */
__disable_irq();
while (1)
{
}
/* USER CODE END Error_Handler_Debug */
}
#ifdef USE_FULL_ASSERT
/**
* @brief Reports the name of the source file and the source line number
* where the assert_param error has occurred.
* @param file: pointer to the source file name
* @param line: assert_param error line source number
* @retval None
*/
void assert_failed(uint8_t *file, uint32_t line)
{
/* USER CODE BEGIN 6 */
/* User can add his own implementation to report the file name and line number,
ex: printf("Wrong parameters value: file %s on line %d\r\n", file, line) */
/* USER CODE END 6 */
}
#endif /* USE_FULL_ASSERT */STM32例程测试
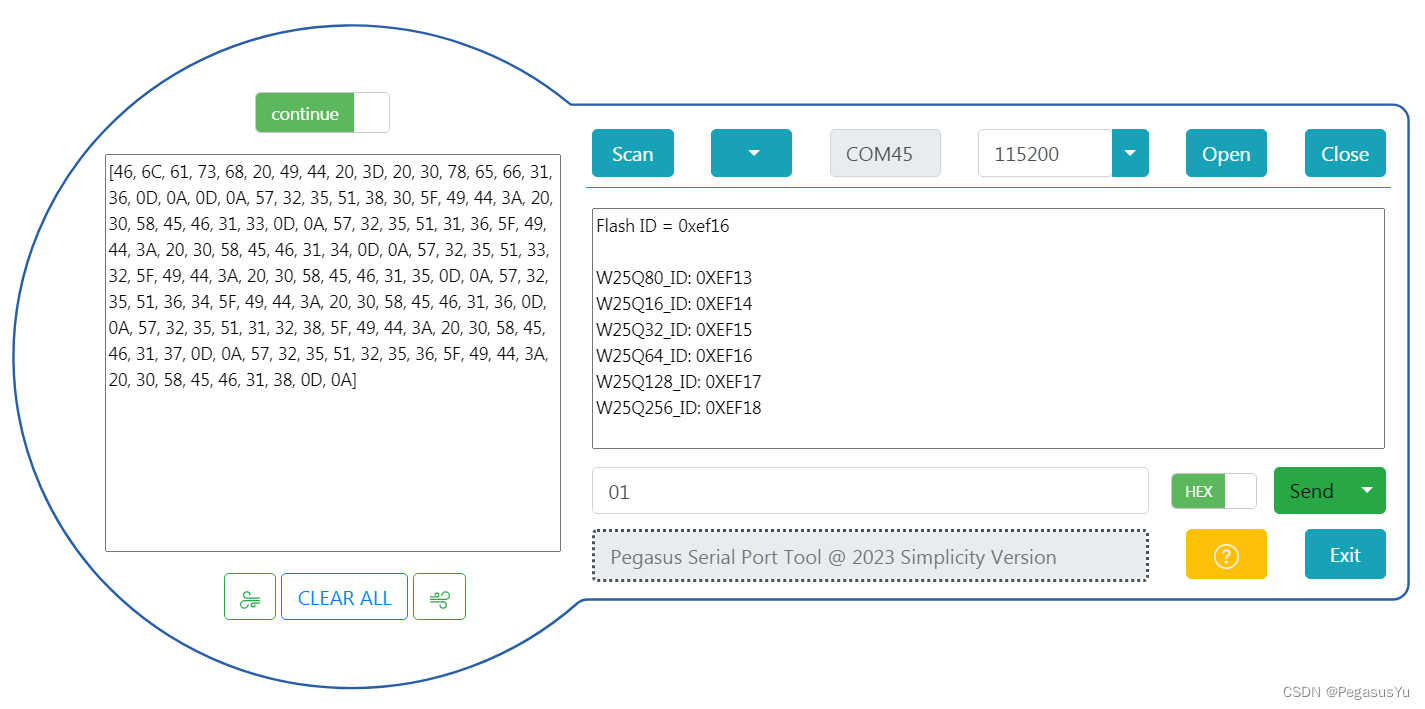
串口指令0x01测试效果如下:
串口指令0x02测试效果如下:
串口指令0x03测试效果如下:
串口指令0x04测试效果如下:
串口指令0x05测试效果如下:
串口指令0x06测试效果如下:
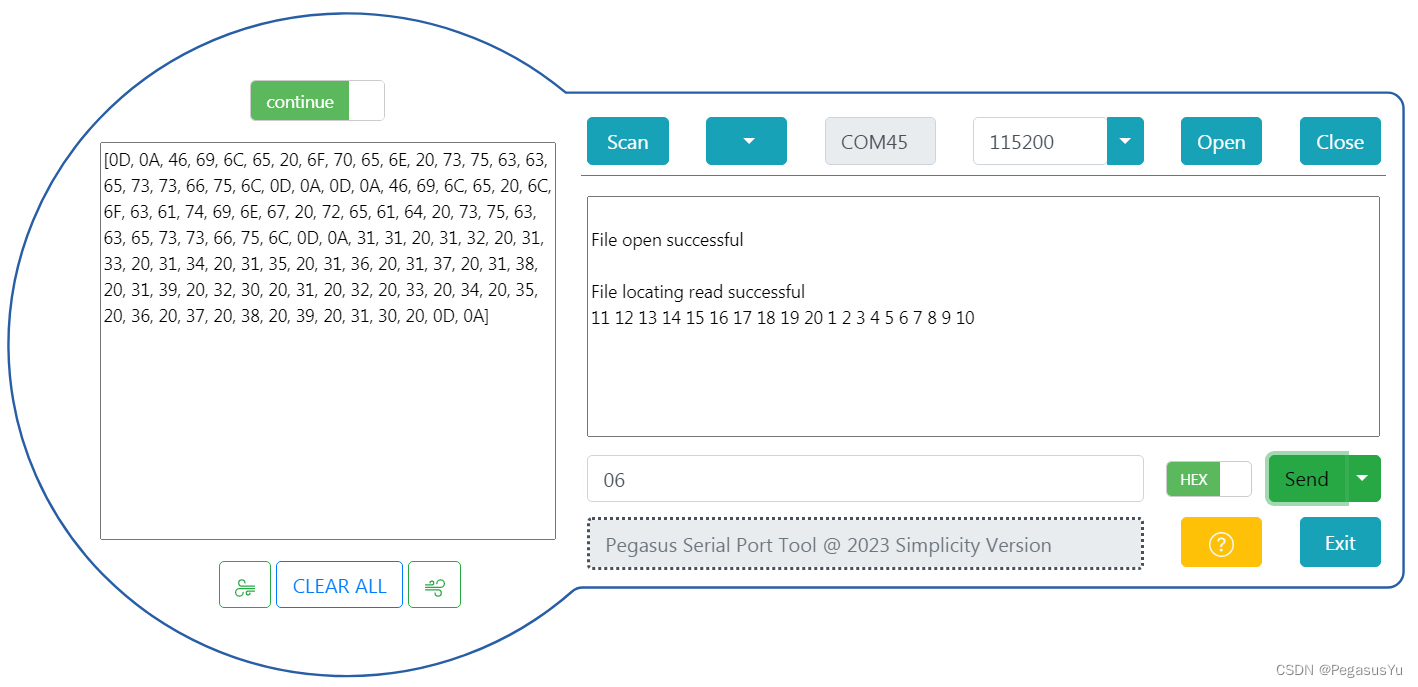
通过串口对FLASH对操作后,可以将STM32 USB接口连接到PC, 从PC端可以看到U盘接入,打开后可以看到通过串口建立和操作的文件:
串口写入文件里的是1~20范围的16进制数据,这里显示为非常规字符,如果串口写入文件里的是英文字母对应的ASCII码16进制数据,文件里也就会显示为英文字母。
当通过U盘形式对文件进行操作后,同样也可以再通过串口对U盘形式操作过的文件访问操作。
STM32例程下载
STM32H750VBT6 模拟U盘桥接SPI总线FATS读写FLASH W25QXX例程下载
U盘模式升级方式
一种STM32升级方式为通过模拟U盘,从PC端将升级文件(.bin文件)存储进到外部FLASH里,STM32重新上电时识别标识从外部FLASH里将版本拷贝进到内部FLASH跳转空间,然后跳转执行。这是IAP升级的U盘接口常见方式,可以参考串口IAP升级过程,主要区别是版本数据获得方式不同。
一个不复杂的问题是为什么不从PC端直接写入.bin文件进到内部FLASH里,因为文件管理系统会占用额外的空间,也会导致文件放置首地址(跳转地址)易变,因此对MCU有限的内部FLASH空间而言不利资源使用。
--End--