今日继续学习树莓派4B 4G:(Raspberry Pi,简称RPi或RasPi)
本人所用树莓派4B 装载的系统与版本如下:
版本可用命令 (lsb_release -a) 查询:
Opencv 版本是4.5.1:

学了这些OpenCv的理论性知识,不进行实践实在是太无聊了,今天就尝试使用OpenCv,已知颜色信息,来识别一张图片的颜色 ,并输出掩膜图像,坐标范围等。
目录
[2、找到掩膜中物体的边界框(Bounding Box):](#2、找到掩膜中物体的边界框(Bounding Box):)
掩膜的基本知识:
掩膜是由0和1组成的一个二进制图像。
当在某一功能中应用掩膜时,1值区域被处理,被屏蔽的0值区域不被包括在计算中。通过制定的数据值,数据范围,有限或无限值,感兴趣区和注释文件来定义图像掩膜,也可以应用上述选项的任意组合作为输入来建立掩膜。
以下定义为AI生成:**掩膜(Mask)**是一个二维数组(或矩阵),通常与图像具有相同的尺寸,但数据类型通常是二值化的(例如,8位无符号整数,其中0表示"无"或"透明",而非零值(如255)表示"有"或"不透明")。掩膜在图像处理中主要用于以下目的:
- 区域选择:你可以使用掩膜来选择图像中的特定区域进行进一步处理。例如,你可能只对图像中的某个特定形状或区域感兴趣,那么你可以创建一个只在该区域内部为1(或255),其他地方为0的掩膜,然后将其与原始图像相乘,从而只保留你感兴趣的区域。
- 形态学操作:在形态学图像处理中,如腐蚀(erosion)和膨胀(dilation),掩膜被用作结构元素。这些结构元素定义了邻域的形状和大小,用于确定像素的邻域如何影响该像素的最终值。
- 融合和混合:掩膜也可以用于将两个或多个图像融合在一起。例如,你可以使用掩膜来定义如何将一个图像的内容叠加到另一个图像上,只在掩膜为1的位置进行叠加。
- 图像修复:在图像修复或去噪中,掩膜可以帮助确定哪些像素需要被修复或替换。
RGB颜色控件与HSV:
在已知的图像中我们常用RGB的三元值大小来描述一个颜色,但RGB不适用于环境变化的情况,因此需要将RGB转换为HSV的描述形式,
这里需要注意的是,通过软件获取RGB数值后,传给Opencv程序的顺序应该是BGR!
RGB颜色空间
RGB(红、绿、蓝)颜色控件是基于RGB颜色空间的。RGB颜色空间是工业界的一种颜色标准,它使用三个颜色通道(红色、绿色和蓝色)来表示颜色。每个通道都有256个可能的值(从0到255),因此RGB颜色空间可以表示约16,777,216种不同的颜色(即256^3)。
特点:
- 基础性:RGB颜色空间是图像处理中最基本、最常用的颜色空间,因为它与大多数显示设备和打印设备直接相关。
- 面向硬件:RGB颜色空间是面向硬件的,因此它在计算机图形和图像处理中非常常见。
- 受亮度影响:RGB颜色空间的三个分量(红、绿、蓝)都与亮度密切相关。因此,当亮度改变时,三个分量都会相应地改变。
- 均匀性较差:RGB颜色空间是一种均匀性较差的颜色空间,因为人眼对这三种颜色分量的敏感程度是不一样的。
HSV颜色空间
HSV(色调、饱和度、明度)颜色控件是基于HSV颜色空间的。HSV颜色空间比RGB更接近人们对彩色的感知经验,它使用色调(Hue)、饱和度(Saturation)和明度(Value)三个参数来描述颜色。
特点:
- 直观性:HSV颜色空间非常直观地表达颜色的色调、鲜艳程度和明暗程度,方便进行颜色的对比。
- 稳定性:HSV颜色空间在面对光照变化时比RGB更稳定,能更好地反映颜色的本质。
- 适合图像处理:由于HSV颜色空间的直观性和稳定性,它在图像处理中比RGB更受欢迎。例如,在HSV颜色空间下,更容易跟踪某种颜色的物体,常用于分割指定颜色的物体。
- 参数范围:在HSV颜色空间中,色调(H)的取值范围为0°到360°,饱和度(S)和明度(V)的取值范围通常为0%到100%。
准备需要识别的图片:
这里我使用Photoshop随手画了个图片,并使用取色器获取到了
其中蓝色区域RGB的数值:
B: 255
G: 97
R: 34
python
# coding=utf-8
import sys
import numpy as np
import cv2
blue = sys.argv[1]
green = sys.argv[2]
red = sys.argv[3]
color = np.uint8([[[blue, green, red]]])
hsv_color = cv2.cvtColor(color, cv2.COLOR_BGR2HSV)
hue = hsv_color[0][0][0]
print("Lower bound is :"),
print("[" + str(hue-10) + ", 100, 100]\n")
print("Upper bound is :"),
print("[" + str(hue + 10) + ", 255, 255]")编写RGB转BGR程序:
编写以下程序能辅助我们将已知颜色的BGR数值转换为HSV形式:
python# coding=utf-8 import sys import numpy as np import cv2 blue = sys.argv[1] green = sys.argv[2] red = sys.argv[3] color = np.uint8([[[blue, green, red]]]) hsv_color = cv2.cvtColor(color, cv2.COLOR_BGR2HSV) hue = hsv_color[0][0][0] print("Lower bound is :"), print("[" + str(hue-10) + ", 100, 100]\n") print("Upper bound is :"), print("[" + str(hue + 10) + ", 255, 255]")
测试转换程序:
1、现将编写好的脚本传输给树莓派(通过mobaxterm的SSH远程连接):
2、在终端输入命令运行得到运算结果如下:

编写颜色识别程序:
1、接下来编写颜色识别程序如下:
注意: 如果你使用的图片需要检测的已知BGR与我不一致,那你需要再回到上一步获取对应HSV值,并在代码中将这俩行替换:
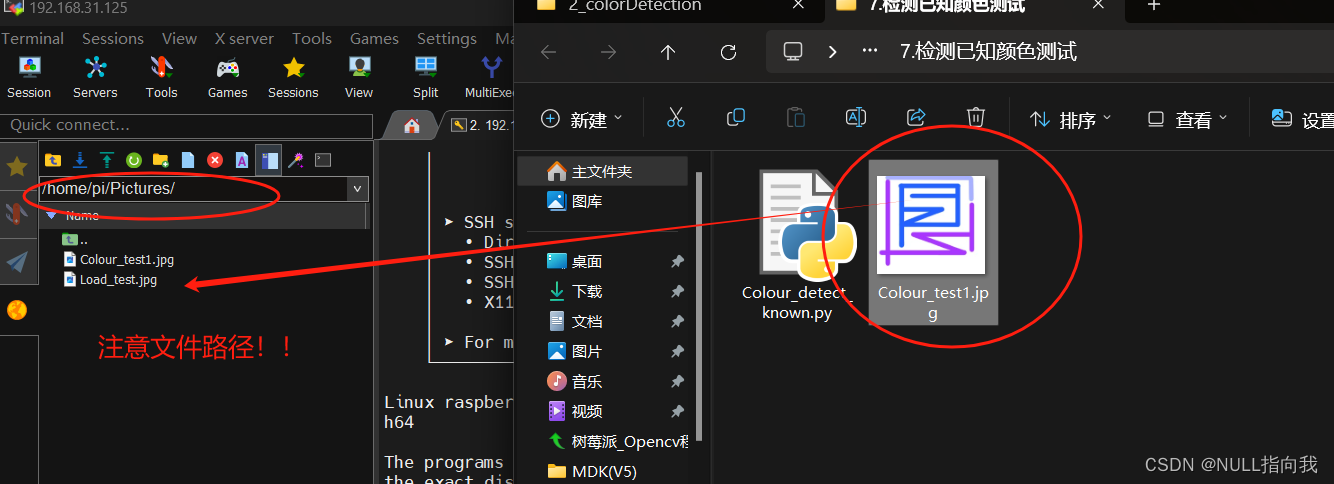
python# 这行指定了文件的编码格式为utf-8 # coding=utf-8 import cv2 import numpy as np # 使用cv2.imread函数读取指定路径下的图片文件。第二个参数1表示读取彩色图像(BGR格式) img = cv2.imread('/home/pi/Pictures/Colour_test1.jpg', 1) # 使用cv2.resize函数调整图像大小。这里,目标宽度和高度被设置为(0,0),表示将按照给定的缩放因子fx和fy来缩放图像。 # fx=0.2和fy=0.2表示图像在水平和垂直方向上都将缩小到原来的20%。 #img = cv2.resize(img, (0,0), fx=0.2, fy=0.2) # 将图像从BGR色彩空间转换为HSV色彩空间。HSV色彩空间更适用于颜色范围检测,因为它基于色调(H)、饱和度(S)和亮度(V)。 hsv = cv2.cvtColor(img, cv2.COLOR_BGR2HSV) # 定义一个NumPy数组,表示HSV色彩空间中颜色的下界。这里的数值代表色调、饱和度和亮度的最小值。 lower_range = np.array([101, 100, 100], dtype=np.uint8) # 定义一个NumPy数组,表示HSV色彩空间中颜色的上界。这里的数值代表色调、饱和度和亮度的最大值。 upper_range = np.array([121, 255, 255], dtype=np.uint8) # 使用cv2.inRange函数根据指定的HSV颜色范围创建一个掩码图像。该掩码图像中,属于指定颜色范围的像素值为255(白色),其他像素值为0(黑色)。 mask = cv2.inRange(hsv, lower_range, upper_range) # 使用cv2.imshow函数显示掩码图像,窗口标题为'mask'。 cv2.imshow('mask',mask) # 使用cv2.imshow函数显示原始图像(经过缩放和色彩空间转换后),窗口标题为'image'。 cv2.imshow('image', img) while(1): #等待用户按键,按下'q'就释放资源退出程序 key=cv2.waitKey(1) if key&0XFF==ord('q'): break cv2.destroyAllWindows()2、将图片SSH传输给树莓派:
注意: 图片位置需要与程序对应,这个请自行检查:

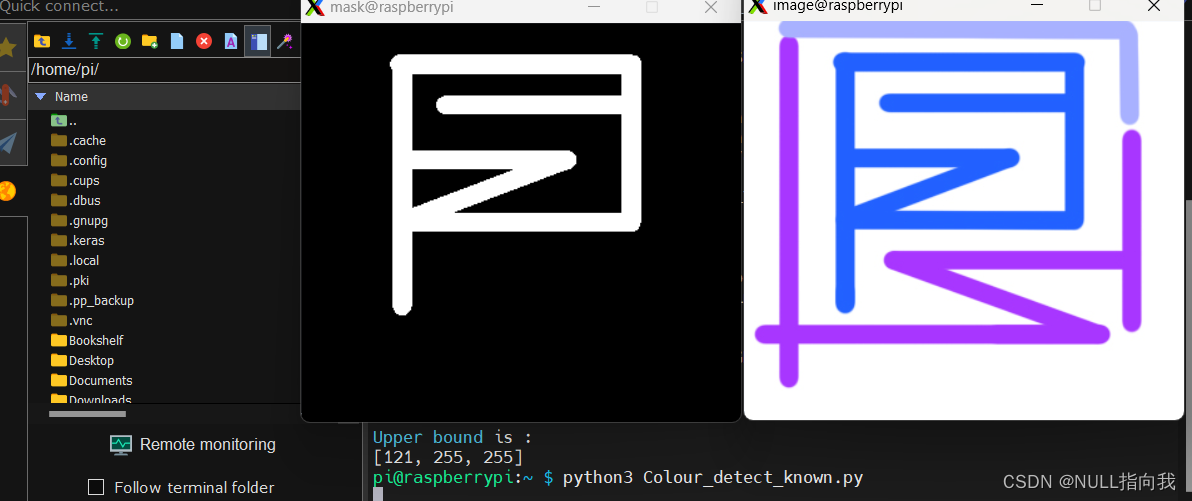
测试颜色识别程序:
发现能够将识别到的颜色掩膜输出:
更改掩膜颜色:
我们可以在之前程序基础上对掩膜的颜色进行更改: 只需添加一句:
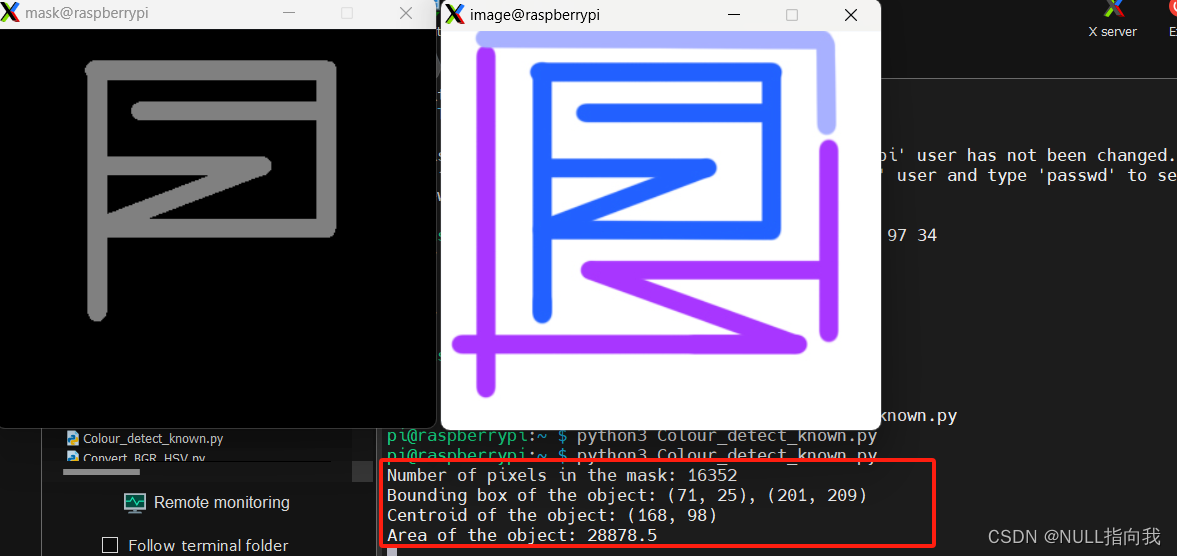
然后就改变掩膜的颜色为灰色了:


进一步获取掩膜的有用参数:
1、计算掩膜覆盖的像素:
需要注意的是,这里的mask的值需要根据你的具体设置进行更改:
pythonnum_pixels = np.sum(mask == 255) # 或者 np.count_nonzero(mask) print(f"Number of pixels in the mask: {num_pixels}")
2、找到掩膜中物体的边界框(Bounding Box):
通过寻找掩膜中所有非零像素的边界,您可以得到这些像素在图像中的位置。
python# 使用OpenCV的findContours函数找到轮廓 contours, _ = cv2.findContours(mask, cv2.RETR_EXTERNAL, cv2.CHAIN_APPROX_SIMPLE) # 假设我们只关心最大的轮廓(即最大的物体) if contours: c = max(contours, key=cv2.contourArea) x, y, w, h = cv2.boundingRect(c) print(f"Bounding box of the object: ({x}, {y}), ({w}, {h})")
3、计算掩膜中物体的质心(Centroid):
质心是物体所有像素的加权平均位置。
pythonM = cv2.moments(contours[0]) if contours else None if M != None: cX = int(M["m10"] / M["m00"]) cY = int(M["m01"] / M["m00"]) print(f"Centroid of the object: ({cX}, {cY})")
4、计算掩膜中物体的面积:
这可以通过计算掩膜中非零像素的数量来实现。
pythonarea = cv2.contourArea(contours[0]) if contours else 0 print(f"Area of the object: {area}")
综合测试效果如下:
整体测试工程下载:
网上查阅资料贴出:
树莓派基础7.树莓派OpenCV颜色识别案例讲解_哔哩哔哩_bilibili
opencv(12): 掩膜Mask_opencv mask-CSDN博客