上一节我们学习了串口通信的基本理论,串口通信是学习单片机的一个重要的一步,非常重要,这一节我们通过实验来学习串口通信的使用,以及串口的接收中断的使用。下面是简单的串口时序图,清晰的展示了数据的发送过程

一、发送单个字节uint8_t数据或者字符型数据
实现的功能:
STM32F4 通过串口和上位机通信,发送单个字节数据(0-255)或者字符给上位机,然后显示在电脑串口助手上。
my_usart.h文件内容
cpp
#ifndef __MY_USART1_H__
#define __MY_USART1_H__
#include <stdint.h>
void My_UsartInit(void); //串口初始化
void Usart_SendByte(uint8_t date); //发送一字节函数
#endifmy_usart.c文件内容
cpp
#include "stm32f4xx.h"
#include "myusart.h"
#include<stdio.h> //对printf()函数进行重定向引入头文件
/******************************
第一步:串口时钟使能,GPIO 时钟使能。
第二步:设置引脚复用器映射:调用 GPIO_PinAFConfig 函数
第三步:GPIO 初始化设置:要设置模式为复用功能
第四步:串口初始化:设置波特率,字长,奇偶校验等参数。
第五步:使能串口
*/
void My_UsartInit(void)
{
//1.第一步:串口时钟使能,GPIO 时钟使能
RCC_AHB1PeriphClockCmd(RCC_AHB1Periph_GPIOA,ENABLE);
RCC_APB2PeriphClockCmd(RCC_APB2Periph_USART1,ENABLE);
//2.第二步:设置引脚复用器映射:调用 GPIO_PinAFConfig 函数
GPIO_PinAFConfig(GPIOA,GPIO_PinSource9,GPIO_AF_USART1);
GPIO_PinAFConfig(GPIOA,GPIO_PinSource10,GPIO_AF_USART1);
//3.第三步:GPIO 初始化设置:要设置模式为复用功能
GPIO_InitTypeDef Struct1;
Struct1.GPIO_Mode=GPIO_Mode_AF;
Struct1.GPIO_Pin=GPIO_Pin_9 |GPIO_Pin_10;
Struct1.GPIO_Speed=GPIO_Speed_100MHz;
GPIO_Init(GPIOA,&Struct1);
//4.第四步:串口初始化:设置波特率,字长,奇偶校验等参数。
USART_InitTypeDef Struct2;
Struct2.USART_BaudRate=115200; //设置波特率
Struct2.USART_WordLength=USART_WordLength_8b; //数据位8位
Struct2.USART_Parity=USART_Parity_No; //无校验位
Struct2.USART_StopBits=USART_StopBits_1; //1位停止位
Struct2.USART_HardwareFlowControl=USART_HardwareFlowControl_None; //不需要硬件流控
Struct2.USART_Mode= USART_Mode_Rx |USART_Mode_Tx; //设置usart1既可以接收也可以发送
USART_Init(USART1,&Struct2);
//5.第五步:使能串口
USART_Cmd(USART1,ENABLE);
}
//发送一字节(一个字符)函数
void Usart_SendByte(uint8_t data)
{
USART_SendData(USART1,data); //这是一个库函数,用于将一个字节的数据写入USART的数据寄存器
while(USART_GetFlagStatus(USART1,USART_FLAG_TXE)==RESET); //等待发送完毕
}
//对printf()函数进行重定向
int fputc(int ch, FILE *f)
{
USART_SendData(USART1,ch); //通过串口发送数据,每次发送一个字符
while(USART_GetFlagStatus(USART1,USART_FLAG_TXE)==RESET); //等待发送完毕
return ch;
}main.c代码
cpp
#include <stdio.h>
#include "myusart.h"
int main(void)
{
My_UsartInit();
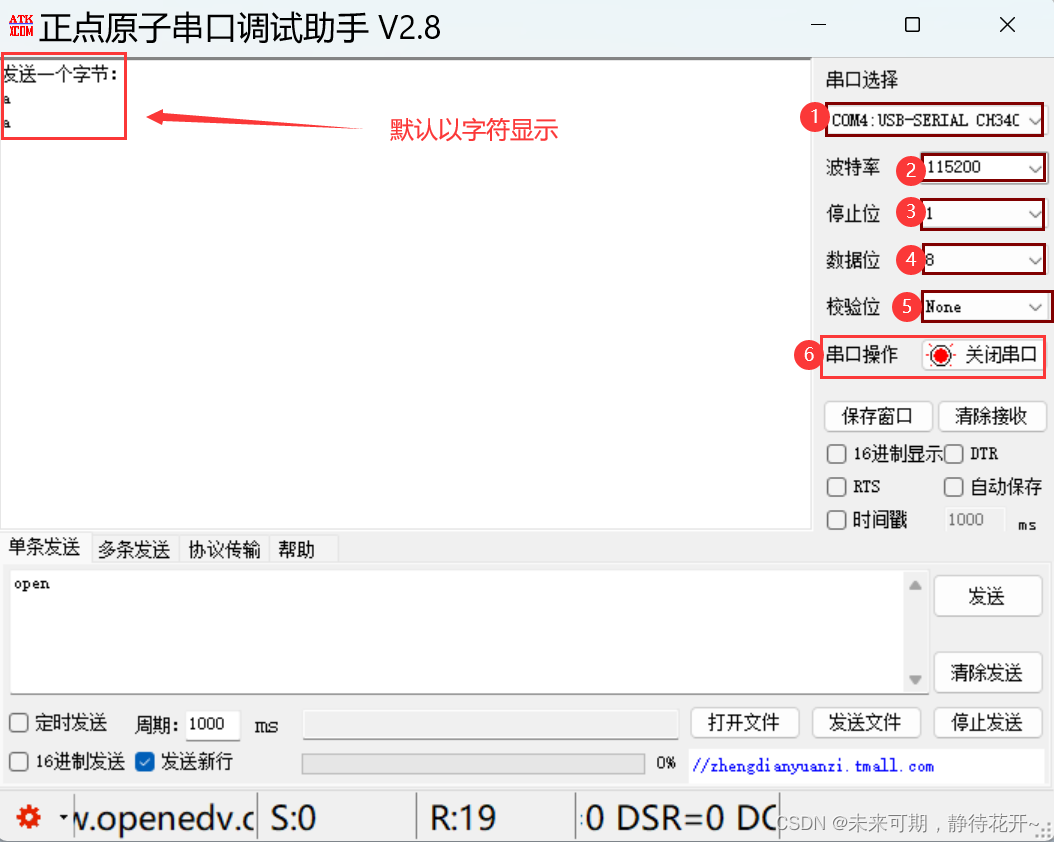
printf("发送一个字节:\n");
Usart_SendByte('a');
printf("\n");
Usart_SendByte(97);
printf("\n");
while(1)
{
}
}关键部分解读:
发送过程:调用串口发送函数USART_SendData(),但是需要保证在发送下一个字节之前,必须确保当前字节已被成功发送。否则可能会导致新数据写入时覆盖未发送完的数据,造成通信错误。因此,内部使用死循环来控制,调用库函数USART_GetFlagStatus()检查标志位来判断发送的状态!
- 这个
while循环的作用是等待USART的数据寄存器空标志(TXE)被置位。当发送数据寄存器(TDR)中有数据时,TXE标志为RESET。只有当TDR中的数据已被移到移位寄存器中,TXE标志才会被置位。当TXE标志为SET时,表示发送数据寄存器已空,可以发送下一个字节- 具体来说,发送数据过程包括:
- 将数据写入TDR。
- 数据从TDR移到移位寄存器。
- 当移位寄存器开始发送数据时,TDR变空,TXE标志被置位。
while循环确保在TDR变空之前不会发送新的数据,从而避免数据丢失或覆盖。
二、发送一个16位的数据uint16_t
实现的功能:
STM32F4 通过串口和上位机通信,发送两个字节数据(16位)给上位机,然后显示在电脑串口助手上。我们知道串口通信一次只能发送8位的数据,那么如何实现一次发16位呢?
my_usart.h文件内容
cpp
#ifndef __MY_USART1_H__
#define __MY_USART1_H__
#include <stdint.h>
void My_UsartInit(void); //串口初始化
void USART_SendHalfWord(uint16_t data); //发送两个字节函数
#endifmy_usart.c
cpp
#include "stm32f4xx.h"
#include "myusart.h"
#include <stdio.h> //对printf()函数进行重定向引入头文件
/******************************
第一步:串口时钟使能,GPIO 时钟使能。
第二步:设置引脚复用器映射:调用 GPIO_PinAFConfig 函数
第三步:GPIO 初始化设置:要设置模式为复用功能
第四步:串口初始化:设置波特率,字长,奇偶校验等参数。
第五步:使能串口
*/
void My_UsartInit(void)
{
//1.第一步:串口时钟使能,GPIO 时钟使能
RCC_AHB1PeriphClockCmd(RCC_AHB1Periph_GPIOA,ENABLE);
RCC_APB2PeriphClockCmd(RCC_APB2Periph_USART1,ENABLE);
//2.第二步:设置引脚复用器映射:调用 GPIO_PinAFConfig 函数
GPIO_PinAFConfig(GPIOA,GPIO_PinSource9,GPIO_AF_USART1);
GPIO_PinAFConfig(GPIOA,GPIO_PinSource10,GPIO_AF_USART1);
//3.第三步:GPIO 初始化设置:要设置模式为复用功能
GPIO_InitTypeDef Struct1;
Struct1.GPIO_Mode=GPIO_Mode_AF;
Struct1.GPIO_Pin=GPIO_Pin_9 |GPIO_Pin_10;
Struct1.GPIO_Speed=GPIO_Speed_100MHz;
GPIO_Init(GPIOA,&Struct1);
//4.第四步:串口初始化:设置波特率,字长,奇偶校验等参数。
USART_InitTypeDef Struct2;
Struct2.USART_BaudRate=115200; //设置波特率
Struct2.USART_WordLength=USART_WordLength_8b; //数据位8位
Struct2.USART_Parity=USART_Parity_No; //无校验位
Struct2.USART_StopBits=USART_StopBits_1; //1位停止位
Struct2.USART_HardwareFlowControl=USART_HardwareFlowControl_None; //不需要硬件流控
Struct2.USART_Mode= USART_Mode_Rx |USART_Mode_Tx; //设置usart1既可以接收也可以发送
USART_Init(USART1,&Struct2);
//5.第五步:使能串口
USART_Cmd(USART1,ENABLE);
}
//发送两个字节(16位)数据函数
void USART_SendHalfWord(uint16_t data)
{
// 分离高8位和低8位
uint8_t tmp_h = data >>0x08;//将date右移8位,取得高8位数据并赋值给tmp_h。右移8位相当于将高8位移到低8位的位置,高8位的原位置被0填充。
uint8_t tmp_l = data & 0xFF;//将date和0xff(255,二进制为11111111)高八位为0,进行按位与运算,取得低8位数据并赋值给tmp_l。按位与运算将高8位清零,仅保留低8位。
// 发送高8位
USART_SendData(USART1, tmp_h);
while (USART_GetFlagStatus(USART1, USART_FLAG_TXE) == RESET);
// 发送低8位
USART_SendData(USART1, tmp_l);
while (USART_GetFlagStatus(USART1, USART_FLAG_TXE) == RESET);
}
//对printf()函数进行重定向
int fputc(int ch, FILE *f)
{
USART_SendData(USART1,ch); //通过串口发送数据,每次发送一个字符
while(USART_GetFlagStatus(USART1,USART_FLAG_TXE)==RESET); //等待发送完毕
return ch;
}main.c
cpp
#include <stdio.h>
#include "myusart.h"
int main(void)
{
My_UsartInit();
//发送两个字节的数据
USART_SendHalfWord(0xffee);
while(1)
{
}
}
关键部分解读:
串行通信接口通常一次只能处理8位数据,那么,我们就可以通过位运算拿到数据的高八位和低八位分别发送,
Usart_SendHalfWord函数将16位数据分成两个8位数据(高8位和低8位),然后分别通过Usart_SendByte函数发送出去。这种方式在串行通信中很常见。使用示例
假设我们有一个要发送的16位数据
0x1234:
tmp_h = 0x12:0x1234右移8位得到高8位0x12。tmp_l = 0x34:0x1234和0xff按位与得到低8位0x34。- 调用
Usart_SendByte(pUSARTx, 0x12)发送高8位。- 调用
Usart_SendByte(pUSARTx, 0x34)发送低8位。这确保16位数据能够通过支持8位传输的USART接口完整发送。
三、发送8位的数组(uint8_t)
实现的功能:
STM32F4 通过串口和上位机通信,发送一个数组(每个元素都是uint8_t类型)或者字符数组给上位机,然后显示在电脑串口助手上。
my_usart.h
cpp
#ifndef __MY_USART1_H__
#define __MY_USART1_H__
#include <stdint.h>
void My_UsartInit(void); //串口初始化
void Usart_SendByte(uint8_t date); //发送一字节函数
void USART1_SendArray(uint8_t *array, uint16_t length);//发送一个数组
#endifmy_usart.c
cpp
#include "stm32f4xx.h"
#include "myusart.h"
#include<stdio.h> //对printf()函数进行重定向引入头文件
/******************************
第一步:串口时钟使能,GPIO 时钟使能。
第二步:设置引脚复用器映射:调用 GPIO_PinAFConfig 函数
第三步:GPIO 初始化设置:要设置模式为复用功能
第四步:串口初始化:设置波特率,字长,奇偶校验等参数。
第五步:使能串口
*/
void My_UsartInit(void)
{
//1.第一步:串口时钟使能,GPIO 时钟使能
RCC_AHB1PeriphClockCmd(RCC_AHB1Periph_GPIOA,ENABLE);
RCC_APB2PeriphClockCmd(RCC_APB2Periph_USART1,ENABLE);
//2.第二步:设置引脚复用器映射:调用 GPIO_PinAFConfig 函数
GPIO_PinAFConfig(GPIOA,GPIO_PinSource9,GPIO_AF_USART1);
GPIO_PinAFConfig(GPIOA,GPIO_PinSource10,GPIO_AF_USART1);
//3.第三步:GPIO 初始化设置:要设置模式为复用功能
GPIO_InitTypeDef Struct1;
Struct1.GPIO_Mode=GPIO_Mode_AF;
Struct1.GPIO_Pin=GPIO_Pin_9 |GPIO_Pin_10;
Struct1.GPIO_Speed=GPIO_Speed_100MHz;
GPIO_Init(GPIOA,&Struct1);
//4.第四步:串口初始化:设置波特率,字长,奇偶校验等参数。
USART_InitTypeDef Struct2;
Struct2.USART_BaudRate=115200; //设置波特率
Struct2.USART_WordLength=USART_WordLength_8b; //数据位8位
Struct2.USART_Parity=USART_Parity_No; //无校验位
Struct2.USART_StopBits=USART_StopBits_1; //1位停止位
Struct2.USART_HardwareFlowControl=USART_HardwareFlowControl_None; //不需要硬件流控
Struct2.USART_Mode= USART_Mode_Rx |USART_Mode_Tx; //设置usart1既可以接收也可以发送
USART_Init(USART1,&Struct2);
//5.第五步:使能串口
USART_Cmd(USART1,ENABLE);
}
//发送一字节函数
void Usart_SendByte(uint8_t data)
{
USART_SendData(USART1,data);
while(USART_GetFlagStatus(USART1,USART_FLAG_TXE)==RESET); //等待发送完毕
}
//发送一个数组
void USART1_SendArray(uint8_t *array, uint16_t len)
{
for (uint16_t i = 0; i < len; i++)
{
Usart_SendByte(array[i]);
}
}
//对printf()函数进行重定向
int fputc(int ch, FILE *f)
{
USART_SendData(USART1,ch); //通过串口发送数据,每次发送一个字符
while(USART_GetFlagStatus(USART1,USART_FLAG_TXE)==RESET); //等待发送完毕
return ch;
}main.c
cpp
#include <stdio.h>
#include "myusart.h"
int main(void)
{
My_UsartInit();
// 要发送的字节数组
uint8_t dataArray1[] = {1,2,3,4,5,6,7,8,9,10};
int len =sizeof(dataArray1) / sizeof(dataArray1[0]);
// 发送一个数组
USART1_SendArray(dataArray1, len);
while (1)
{
}
}
四、发送字符串数据
实现的功能:
STM32F4 通过串口和上位机通信,发送字符串给电脑,然后显示在电脑串口助手上。
my_usart.h文件内容
cpp
#ifndef __MY_USART1_H__
#define __MY_USART1_H__
#include <stdint.h>
void My_UsartInit(void); //串口初始化
void USART1_SendString(char *str); //发送一个字符串
#endifmy_usart.c文件内容
cpp
#include "stm32f4xx.h"
#include "myusart.h"
#include<stdio.h> //对printf()函数进行重定向引入头文件
/******************************
第一步:串口时钟使能,GPIO 时钟使能。
第二步:设置引脚复用器映射:调用 GPIO_PinAFConfig 函数
第三步:GPIO 初始化设置:要设置模式为复用功能
第四步:串口初始化:设置波特率,字长,奇偶校验等参数。
第五步:使能串口
*/
void My_UsartInit(void)
{
//1.第一步:串口时钟使能,GPIO 时钟使能
RCC_AHB1PeriphClockCmd(RCC_AHB1Periph_GPIOA,ENABLE);
RCC_APB2PeriphClockCmd(RCC_APB2Periph_USART1,ENABLE);
//2.第二步:设置引脚复用器映射:调用 GPIO_PinAFConfig 函数
GPIO_PinAFConfig(GPIOA,GPIO_PinSource9,GPIO_AF_USART1);
GPIO_PinAFConfig(GPIOA,GPIO_PinSource10,GPIO_AF_USART1);
//3.第三步:GPIO 初始化设置:要设置模式为复用功能
GPIO_InitTypeDef Struct1;
Struct1.GPIO_Mode=GPIO_Mode_AF;
Struct1.GPIO_Pin=GPIO_Pin_9 |GPIO_Pin_10;
Struct1.GPIO_Speed=GPIO_Speed_100MHz;
GPIO_Init(GPIOA,&Struct1);
//4.第四步:串口初始化:设置波特率,字长,奇偶校验等参数。
USART_InitTypeDef Struct2;
Struct2.USART_BaudRate=115200; //设置波特率
Struct2.USART_WordLength=USART_WordLength_8b; //数据位8位
Struct2.USART_Parity=USART_Parity_No; //无校验位
Struct2.USART_StopBits=USART_StopBits_1; //1位停止位
Struct2.USART_HardwareFlowControl=USART_HardwareFlowControl_None; //不需要硬件流控
Struct2.USART_Mode= USART_Mode_Rx |USART_Mode_Tx; //设置usart1既可以接收也可以发送
USART_Init(USART1,&Struct2);
//5.第五步:使能串口
USART_Cmd(USART1,ENABLE);
}
//发送一个字符串
void USART1_SendString(char *str)
{
while (*str!='\0')
{
USART_SendData(USART1,*str);
while(USART_GetFlagStatus(USART1,USART_FLAG_TXE)==RESET); //等待发送完毕
str++;
}
}
//对printf()函数进行重定向
int fputc(int ch, FILE *f)
{
USART_SendData(USART1,ch); //通过串口发送数据,每次发送一个字符
while(USART_GetFlagStatus(USART1,USART_FLAG_TXE)==RESET); //等待发送完毕
return ch;
}main.c内容:
cpp
#include <stdio.h>
#include "myusart.h"
int main(void)
{
My_UsartInit();
// 要发送的字符串
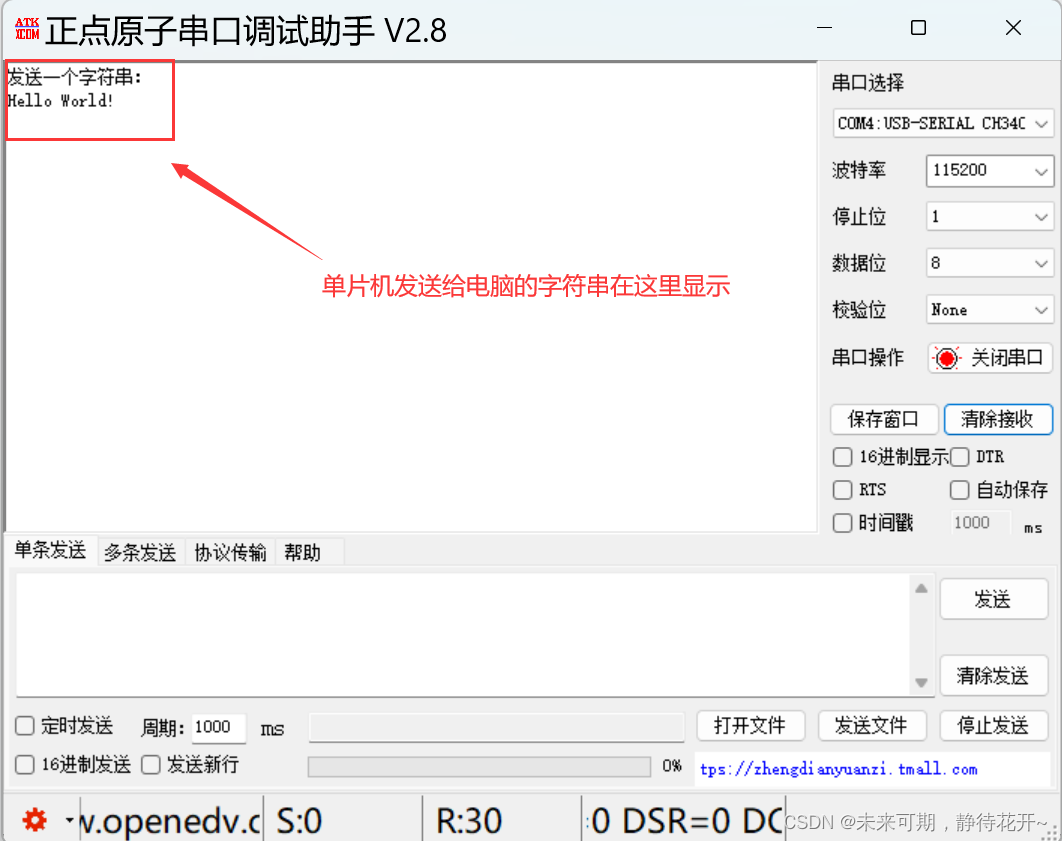
char *dataString = "Hello World!";
// 发送字符串
printf("发送一个字符串:\n");
USART1_SendString(dataString);
printf("\n");
while (1)
{
}
}
五、单片机接收电脑发送的数据显示在串口助手上(接收中断)
使用串口接收中断可以让CPU在没有数据到达时执行其他任务,而不需要浪费时间轮询接收寄存器。这提高了CPU利用率和系统效率,检查标志位判断是否发生接收中断(USART_IT_RXNE),如果是,读取接收到的数据,然后通过清除接收中断标志以准备接收下一个字节。
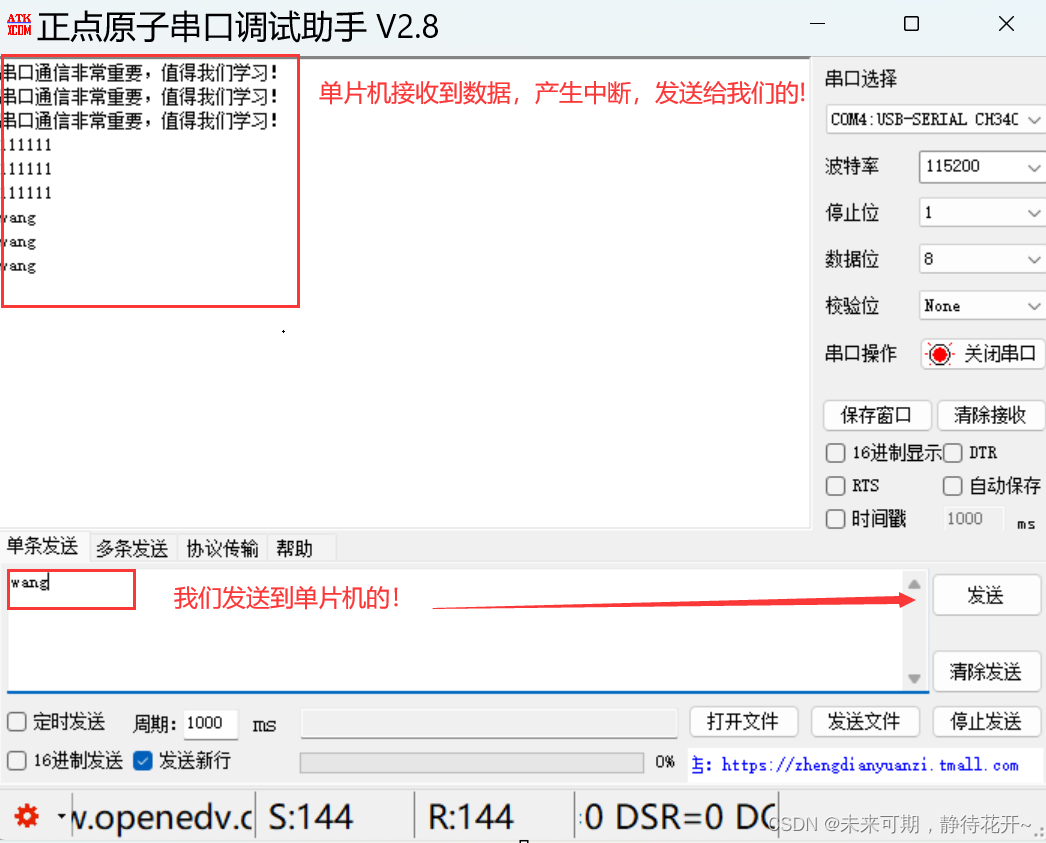
实现的功能:
将接收数据设置为接收中断**,**当上位机发送数据到STM32F407的USART1时,STM32会接收这个数据并通过中断处理函数将数据发送回上位机。上位机的串口助手会显示发送和接收的数据。
my_usart.h
cpp
#ifndef __MY_USART1_H__
#define __MY_USART1_H__
#include <stdint.h>
void USART1_Config(void); //串口配置
void USART1_SendByte(uint8_t data); //发送一个字节函数
void USART1_IRQHandler(void); //中断服务函数
#endifmy_usart.c
cpp
#include "stm32f4xx.h"
#include "myusart.h"
#include<stdio.h> //对printf()函数进行重定向引入头文件
/******************************
第一步:串口时钟使能,GPIO 时钟使能。
第二步:设置引脚复用器映射:调用 GPIO_PinAFConfig 函数。
第三步:GPIO 初始化设置:要设置模式为复用功能。
第四步:串口初始化:设置波特率,字长,奇偶校验等参数。
第五步:开启中断并且初始化 NVIC,使能中断(如果需要开启中断才需要这个步骤)。
第六步:使能串口。
第七步:编写中断处理函数:函数名格式为 USARTxIRQHandler(x 对应串口号)。
*/
void USART1_Config(void)
{
//第一步:串口时钟使能,GPIO 时钟使能
RCC_AHB1PeriphClockCmd(RCC_AHB1Periph_GPIOA, ENABLE);
RCC_APB2PeriphClockCmd(RCC_APB2Periph_USART1, ENABLE);
//第二步:设置引脚复用器映射:调用 GPIO_PinAFConfig 函数。
GPIO_PinAFConfig(GPIOA, GPIO_PinSource9, GPIO_AF_USART1);
GPIO_PinAFConfig(GPIOA, GPIO_PinSource10, GPIO_AF_USART1);
// 第三步:GPIO 初始化设置:要设置模式为复用功能。
GPIO_InitTypeDef GPIO_InitStructure;
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_9|GPIO_Pin_10;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_InitStructure.GPIO_OType = GPIO_OType_PP;
GPIO_InitStructure.GPIO_PuPd = GPIO_PuPd_UP;
GPIO_Init(GPIOA, &GPIO_InitStructure);
// 第四步:串口初始化:设置波特率,字长,奇偶校验等参数。
USART_InitTypeDef USART_InitStructure;
USART_InitStructure.USART_BaudRate = 115200;
USART_InitStructure.USART_WordLength = USART_WordLength_8b;
USART_InitStructure.USART_StopBits = USART_StopBits_1;
USART_InitStructure.USART_Parity = USART_Parity_No;
USART_InitStructure.USART_HardwareFlowControl = USART_HardwareFlowControl_None;
USART_InitStructure.USART_Mode = USART_Mode_Tx | USART_Mode_Rx;
USART_Init(USART1, &USART_InitStructure);
// 第五步:开启中断并且初始化 NVIC,使能USART1接收中断
USART_ITConfig(USART1, USART_IT_RXNE, ENABLE);
NVIC_InitTypeDef NVIC_InitStructure;
NVIC_InitStructure.NVIC_IRQChannel = USART1_IRQn;
NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority = 0;
NVIC_InitStructure.NVIC_IRQChannelSubPriority = 0;
NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE;
NVIC_Init(&NVIC_InitStructure);
// 第六步:使能串口
USART_Cmd(USART1, ENABLE);
}
//发送一字节函数
void USART1_SendByte(uint8_t data)
{
USART_SendData(USART1,data);
while(USART_GetFlagStatus(USART1,USART_FLAG_TXE)==RESET); //等待发送完毕
}
// 第七步:编写中断处理函数:函数名格式为 USARTxIRQHandler(x 对应串口号)
void USART1_IRQHandler(void)
{
if (USART_GetITStatus(USART1, USART_IT_RXNE) != RESET)
{
// 读取接收到的数据
uint8_t receivedData = USART_ReceiveData(USART1);
// 将接收到的数据发送回电脑
USART1_SendByte(receivedData);
// 清除中断标志
USART_ClearITPendingBit(USART1, USART_IT_RXNE);
}
}
//对printf()函数进行重定向
int fputc(int ch, FILE *f)
{
USART_SendData(USART1,ch); //通过串口发送数据,每次发送一个字符
while(USART_GetFlagStatus(USART1,USART_FLAG_TXE)==RESET); //等待发送完毕
return ch;
}main.c
cpp
#include "myusart.h"
int main(void)
{
// 配置USART1
USART1_Config();
while (1)
{
// 主循环中无需处理接收数据,接收数据在中断中处理
}
}
六、向单片机发送指令点亮LED
实现的功能:
STM32F4 通过串口和上位机通信,发送字符串(指令): open(通过串口助手),然后单片机接收,点亮LED灯;
本实验主要是串口通信的控制功能,演示串口通信可以增强硬件的能力!
my_led..h
cpp
#ifndef __MYLED_H
#define __MYLED_H
void LED_Init(void);
#endifmy_led.c
cpp
#include "stm32f4xx.h" // Device header
#include "myled.h"
/*开时钟 打开外设对应的时钟(查看参考手册,该外设挂在哪个数据总线上),对应GPIO在哪条总线开哪条
GPIOF外设 挂在AHB1总线上,所以要打开AHB1的时钟,双击函数,右键->go to definition*/
void LED_Init(void)
{
//第一步:使能GPIOF的时钟
RCC_AHB1PeriphClockCmd(RCC_AHB1Periph_GPIOF, ENABLE);//使能 GPIOF 时钟
//第二步:GPIOF9,F10 初始化设置
GPIO_InitTypeDef GPIO_InitStructure;
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_9 | GPIO_Pin_10;//LED0 和 LED1 对应 IO 口
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_OUT;//普通输出模式
GPIO_InitStructure.GPIO_OType = GPIO_OType_PP;//推挽输出
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_100MHz;//100MHz
GPIO_InitStructure.GPIO_PuPd = GPIO_PuPd_UP;//上拉
GPIO_Init(GPIOF, &GPIO_InitStructure);//初始化 GPIO
//第三步:设置灯的初始状态
GPIO_SetBits(GPIOF,GPIO_Pin_9 | GPIO_Pin_10);//GPIOF9,F10 设置高电平,灯灭
}my_usart.h
cpp
#ifndef __MY_USART1_H__
#define __MY_USART1_H__
#include <stdint.h>
void USART1_Config(void); //串口配置
void USART1_IRQHandler(void);
#endifmy_usart.c
cpp
#include "stm32f4xx.h"
#include "myusart.h"
#include "myled.h"
#include "string.h"
#include <stdio.h>
/******************************
第一步:串口时钟使能,GPIO 时钟使能。
第二步:设置引脚复用器映射:调用 GPIO_PinAFConfig 函数。
第三步:GPIO 初始化设置:要设置模式为复用功能。
第四步:串口初始化:设置波特率,字长,奇偶校验等参数。
第五步:开启中断并且初始化 NVIC,使能中断(如果需要开启中断才需要这个步骤)。
第六步:使能串口。
第七步:编写中断处理函数:函数名格式为 USARTxIRQHandler(x 对应串口号)。
*********************************/
void USART1_Config(void)
{
//第一步:串口时钟使能,GPIO 时钟使能
RCC_AHB1PeriphClockCmd(RCC_AHB1Periph_GPIOA, ENABLE);
RCC_APB2PeriphClockCmd(RCC_APB2Periph_USART1, ENABLE);
//第二步:设置引脚复用器映射:调用 GPIO_PinAFConfig 函数。
GPIO_PinAFConfig(GPIOA, GPIO_PinSource9, GPIO_AF_USART1);
GPIO_PinAFConfig(GPIOA, GPIO_PinSource10, GPIO_AF_USART1);
// 第三步:GPIO 初始化设置:要设置模式为复用功能。
GPIO_InitTypeDef GPIO_InitStructure;
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_9|GPIO_Pin_10;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_InitStructure.GPIO_OType = GPIO_OType_PP;
GPIO_InitStructure.GPIO_PuPd = GPIO_PuPd_UP;
GPIO_Init(GPIOA, &GPIO_InitStructure);
// 第四步:串口初始化:设置波特率,字长,奇偶校验等参数。
USART_InitTypeDef USART_InitStructure;
USART_InitStructure.USART_BaudRate = 115200;
USART_InitStructure.USART_WordLength = USART_WordLength_8b;
USART_InitStructure.USART_StopBits = USART_StopBits_1;
USART_InitStructure.USART_Parity = USART_Parity_No;
USART_InitStructure.USART_HardwareFlowControl = USART_HardwareFlowControl_None;
USART_InitStructure.USART_Mode = USART_Mode_Tx | USART_Mode_Rx;
USART_Init(USART1, &USART_InitStructure);
// 第五步:开启中断并且初始化 NVIC,使能USART1接收中断
USART_ITConfig(USART1, USART_IT_RXNE, ENABLE);
NVIC_InitTypeDef NVIC_InitStructure;
NVIC_InitStructure.NVIC_IRQChannel = USART1_IRQn;
NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority = 0;
NVIC_InitStructure.NVIC_IRQChannelSubPriority = 0;
NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE;
NVIC_Init(&NVIC_InitStructure);
// 第六步:使能串口
USART_Cmd(USART1, ENABLE);
}
// 第七步:编写中断处理函数:函数名格式为 USARTxIRQHandler(x 对应串口号)
// USART1中断服务程序
void USART1_IRQHandler(void)
{
// 检查USART1是否接收到数据
if (USART_GetITStatus(USART1, USART_IT_RXNE) != RESET)
{
// 读取接收到的字符
char received_char = USART_ReceiveData(USART1);
// 存储接收到的字符串的缓冲区
static char buffer[10];
static uint8_t index = 0;
if (received_char != '\n' && received_char != '\r')//接收数据的结束标志
{
// 将字符存储到缓冲区
buffer[index] = received_char;
index++;
}
else
{
//将字符串末尾设置为'\0'
buffer[index] = '\0';
index = 0; //置0,为下一次存储做准备
// 检查接收到的字符串是否为"open"
if (strcmp(buffer, "open") == 0)
{
// 点亮LED灯
GPIO_ResetBits(GPIOF, GPIO_Pin_9| GPIO_Pin_10);
}
}
}
}
//对printf()函数进行重定向
int fputc(int ch, FILE *f)
{
USART_SendData(USART1,ch); //通过串口发送数据,每次发送一个字符
while(USART_GetFlagStatus(USART1,USART_FLAG_TXE)==RESET); //等待发送完毕
return ch;
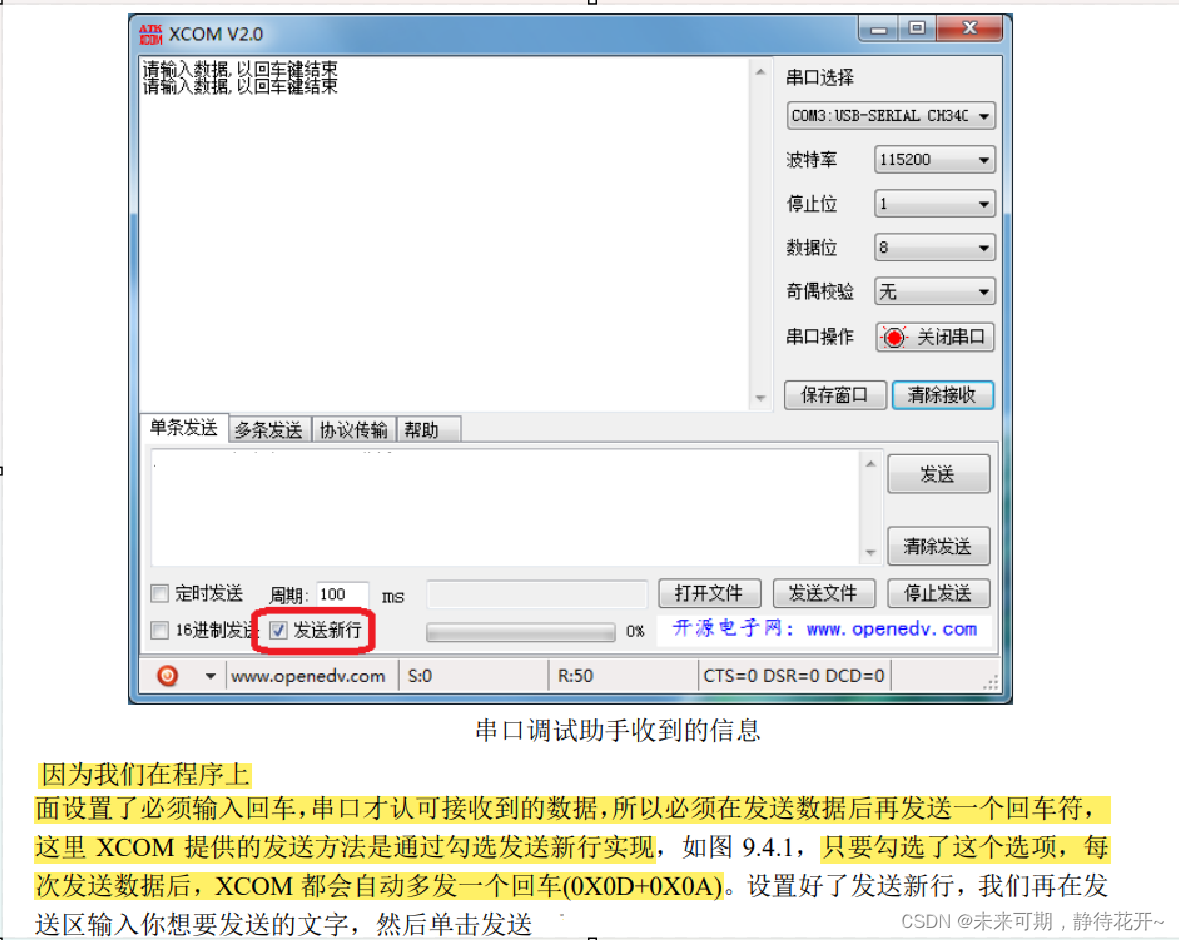
}**注意:因为我们在程序上面设置了必须输入回车或者换行,串口才认可接收到的数据,所以必须在发送数据后再发送一个回车符, 这里 XCOM 提供的发送方法是通过勾选发送新行实现,如图,只要勾选了这个选项,每次发送数据后,XCOM 都会自动多发一个回车(0X0D+0X0A)。**设置好了发送新行,我们再在发送区输入发送的命令:open,然后单击发送,这样灯便会点亮!
main.c代码:
cpp
#include <stdio.h>
#include "myusart.h"
#include "myled.h"
int main(void)
{
LED_Init();
USART1_Config();
while (1)
{
// 主循环中无需处理接收数据,接收数据在中断中处理
}
}
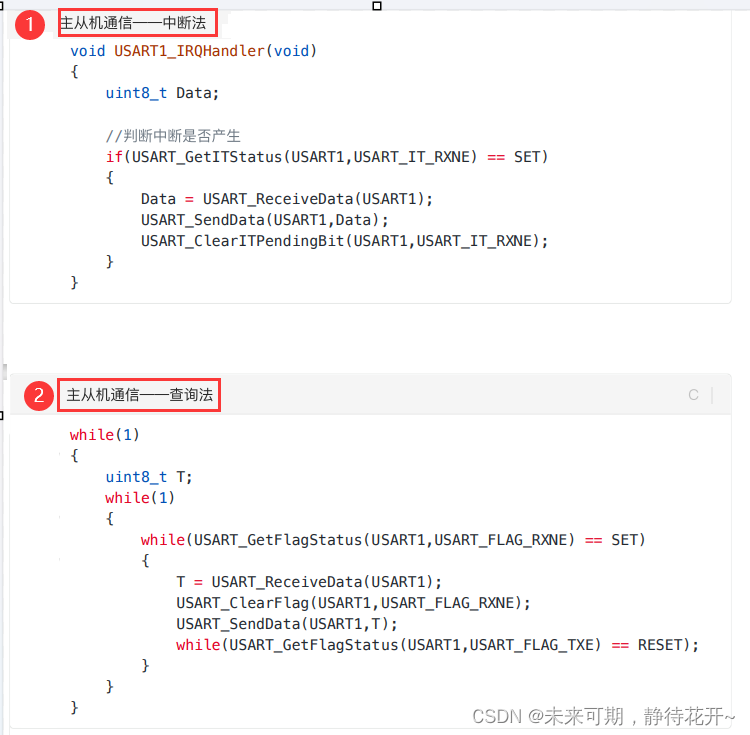
七、主从机通信的两种方式


至此,我们的本次的学习就结束了。通过以上几个实验,相信对串口通信有了深入的理解,这一节我们就讲解到这里,希望能对大家的开发有帮助。 如有兴趣,感谢点赞、关注、收藏,若有不正地方,还请各位大佬多多指教!