本文档为一份详细的关于TYTO机器人公司提供的电机和螺旋桨理论及其实验操作的指南。指南首先概述了材料、实验目标以及实验的介绍部分,随后详细阐述了理论问题、实验步骤和附录内容。实验目的在于通过实际测试来测量和理解不同螺旋桨参数对无人机性能的影响,包括但不限于飞行时间的计算。实验分为四个主要步骤:设置实验、确认电机旋转、测试螺旋桨以及计算飞行时间。此外,还包括了一个附录部分,介绍了电机和螺旋桨的具体规格,以及如何校准测力计和找到最佳的螺旋桨安装配置。整个指南不仅提供了必要的理论背景知识,而且也指导用户进行实际操作,从而确保能够有效地评估和选择最适合的电机和螺旋桨组合以优化无人机的性能。
1、课程关键要点
- 课程介绍使用RCbenchmark软件进行无人机电机和螺旋桨测试的方法。
- 测试了四种不同螺旋桨的推力和效率,并确定了最佳匹配。
- 提供了计算螺旋桨效率和推力系数的公式。
- 需要重复测试以确保结果准确。
- 最终选择最佳电机-螺旋桨组合并选择合适的电池来提高飞行时间。
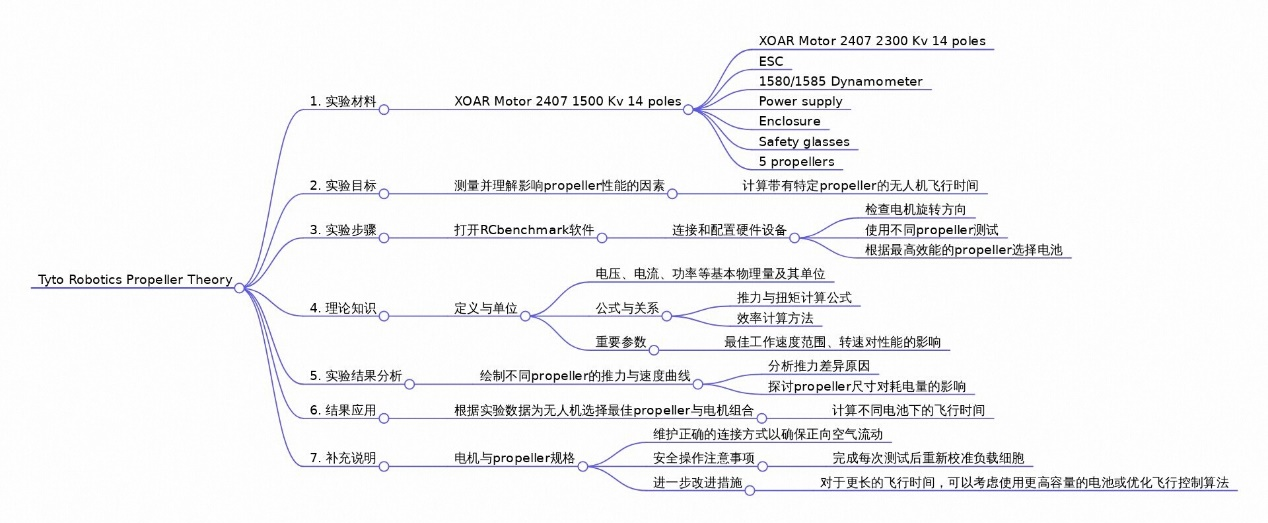
2、无人机螺旋桨理论实验及参数测量
章节介绍了关于无人机飞行中的重要组件------螺旋桨的理论知识和实验方法。通过实验测量不同参数下螺旋桨的性能指标,可以了解影响螺旋桨效率的因素,并计算出无人机的飞行时间。其中,重要的因素包括螺旋桨直径、叶片数、转速等。在实验过程中需要使用一些设备如电机、电调、动力计等,并注意安全防护措施。最终目的是为了设计出更加高效节能的无人机系统。
3、无人机理论与实验教程
章节主要介绍了无人机的理论知识和实验步骤。其中包括了对四旋翼无人机的推力计算、不同螺旋桨的测试以及最佳匹配的选择等。同时,还提供了使用RCbenchmark软件进行实验的具体操作流程,并强调了安全注意事项。这些理论和实践知识对于学习和掌握无人机技术非常有帮助。
4、电机控制实验步骤及原理介绍
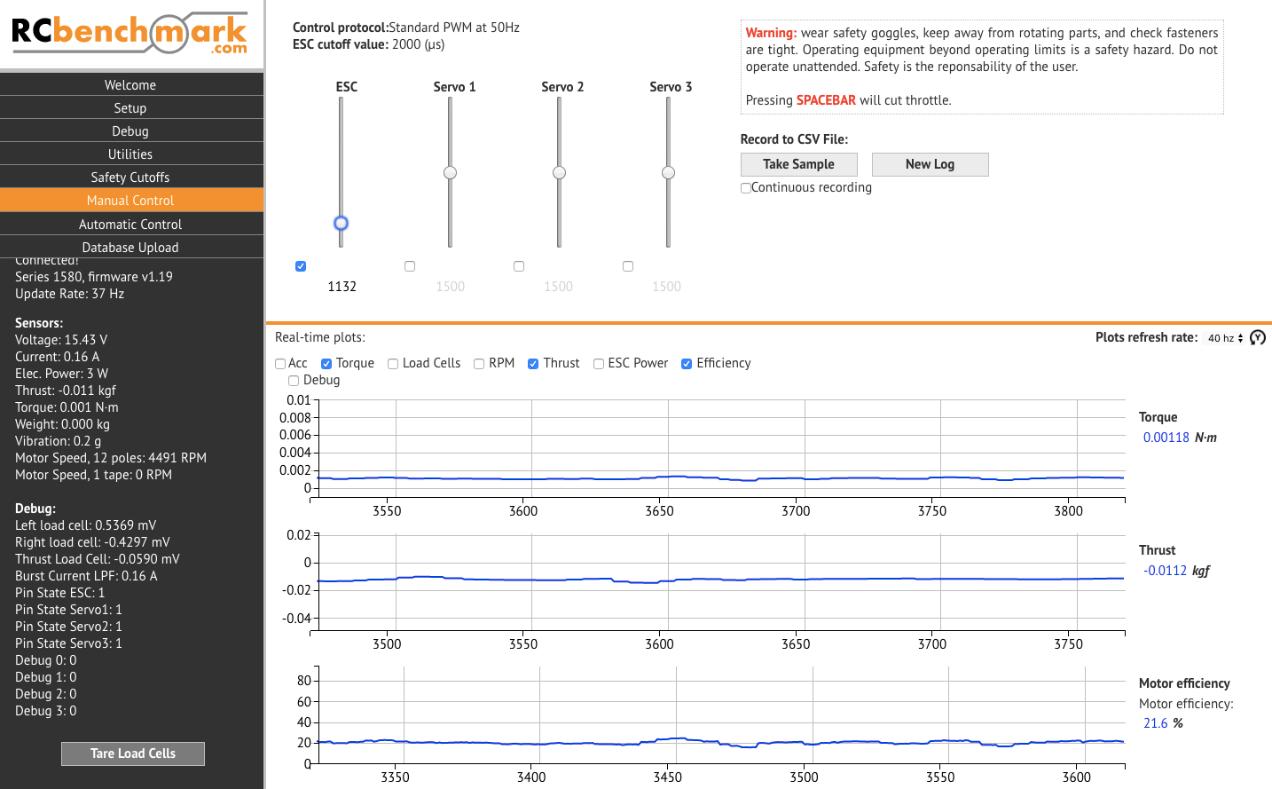
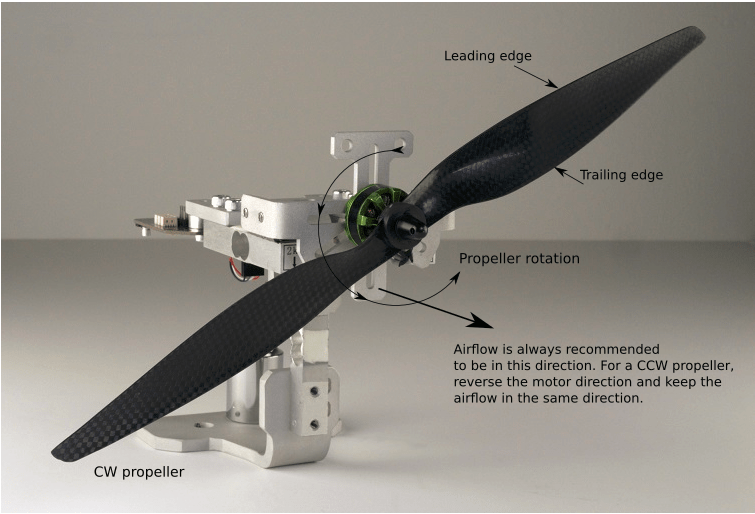
章节介绍了如何设置和操作TYTO机器人的电机控制。首先需要选择或创建一个工作目录,并在"Utilities"选项卡中设置手动控制滑块的限制。然后需要选择合适的螺旋桨并将其正确安装,确保空气流动方向符合要求。接下来打开电源供应器并将电压设定在14-15V之间,使用电子速度控制器(ESC)将直流电转换成三相交流电,并通过脉冲宽度调制(PWM)控制电流的送入时间长短来控制电机的速度。最后,在手动控制选项卡中激活ESC,确认螺旋桨旋转方向是否正确。需要注意的是,在操作过程中要戴上安全眼镜,保持距离旋转部件的安全距离,并检查紧固件是否牢固。
5、测试螺旋桨性能并分析影响因素
章节介绍了如何测试和比较不同型号的螺旋桨性能。首先需要在自动控制选项卡中选择Sweep-discrete V2脚本,并设置输入值范围和步数等参数。然后运行脚本,在测量前需要进行一段时间的稳定状态,记录下每个步骤的数据并计算平均值。最后将所有数据绘制成图表,可以发现不同型号的螺旋桨产生的推力和功率有所不同。
6、无人机最佳组合选择与飞行时间优化
章节介绍了如何选择适合的无人机电机和电池来提高飞行时间,并且给出了具体的测试步骤和注意事项。在第一步中,需要测试不同型号的无人机电机和螺旋桨,找到最适合的组合。第二步中,需要使用两种不同的电机进行测试,找到效率最高的电机。第三步中,需要根据最佳电机和螺旋桨组合,计算出每种电池的飞行时间,并选择最长飞行时间的电池。最后一步是提出其他可能的测试方法,以进一步优化飞行时间。此外,还提供了电机和螺旋桨的规格、校准工具等详细信息。
7、最佳螺旋桨安装方式
章节介绍了如何设置螺旋桨的最佳方式。建议将螺旋桨朝向电机,这样空气流动就会从工具向外推动。对于7英寸的螺旋桨来说,拧紧螺母可能会比较困难,因此可以在螺母和螺旋桨之间放置一个塑料垫片来使其更容易安装。
我们的无人机动力测试软件开源并兼容所有产品系列的试验台,以帮助您便捷地控制无人机动力系统同时记录相关测量数据。
测试台可以手动或自动控制并兼容Windows, Linux, Mac和Chrome OS等环境。软件界面以文本和图形的形式实时显示传感器信息,用户可以记录单个测量数据点或区间的连续测量数据。我们提供了预编写的测试脚本,您也可以对其进行再编辑,或者重新编写您的自定义脚本。
当测量数据完成记录,您可以轻松地将其导出为. CSV文件,大多数电子表格软件都可读取。您可以设置自己的测量数值单位,安全开关和实时图表来满足您的需求。您的测量结果将为您提供有关螺旋桨和电机效率以及电力消耗等重要信息。
8、动力系统教学课程操作软件
系统配备的实验室设备为学生们提供了一个实践操作的机会-学生的任务目标是通过选择合适的电机和螺旋桨来最大化延长小型无人机的设计飞行时间,最大化提升无人机的动力系统效率。