工业机器人(industrial robot)、工业机械手(industrial manipulator)、机械臂(robotic arms)的区别
工业机器人、工业机械手和机械臂虽然在某些方面有重叠,但它们在定义和应用上有一些区别:
- 工业机器人 (Industrial Robot):
-
定义: 工业机器人是用于工业自动化的多关节机械手或多自由度的机器装置,能够自动执行各种任务。
-
应用 : 广泛应用于制造业,如焊接、喷涂、装配、搬运、包装、码垛、检测等12。
工业机械手 (Industrial Manipulator):
-
定义: 工业机械手通常是指一种固定在某个位置的机械装置,能够模仿人手的动作,用于搬运、装配等任务。
-
应用 : 主要用于需要高精度和重复性的任务,如电子产品装配、精密仪器制造等3。
机械臂 (Robotic Arm):
-
定义: 机械臂是指具有多个关节的机械装置,可以模仿人手臂的动作。机械臂可以是工业机器人的一部分,也可以是独立的装置。
-
应用 : 常用于需要灵活操作的场景,如医疗手术、实验室操作、教育培训等4。
(1) KUKA工业机器人 -- 工业机器人自动化解决方案 | KUKA AG. https://www.kuka.com/zh-cn/products/robotics-systems/industrial-robots.
(2) 工业机器人 | ABB Robotics. https://new.abb.com/products/robotics/zh/robots.
(3) 工业机器人 Industrial robot|机械臂|关节机器人|机械手 .... https://www.nfdzyb.com/product-category/robots-and-automation-devices/industrial-robot.
(4) 工业机器人专业英语课件Chapter 1 - 百度文库. https://wenku.baidu.com/view/e12804a8316c1eb91a37f111f18583d048640f17.html.
(5) IRB 14050单臂YuMi - YuMi (协作机器人 | ABB Robotics). https://new.abb.com/products/robotics/zh/robots/collaborative-robots/yumi/irb-14050单臂yumi.
机器人与操纵器(工业机械手)之间的区别是什么?
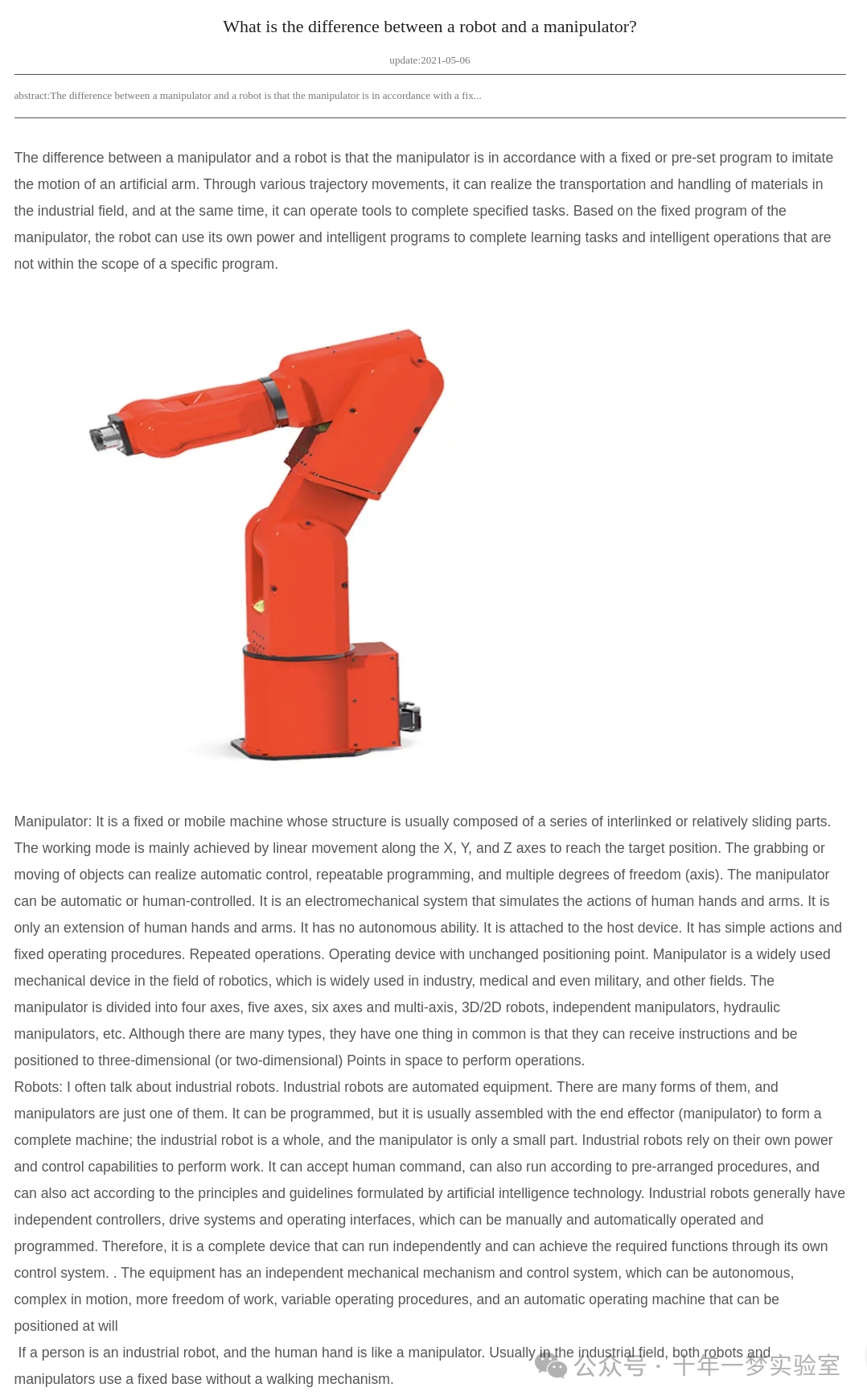
操纵器与机器人的区别在于,操纵器是根据固定或预设的程序来模仿人工手臂的运动。通过各种轨迹运动,它可以实现工业领域中材料的运输和处理,同时,它还可以操作工具完成指定的任务。基于操纵器的固定程序,机器人可以利用自身的动力和智能程序完成学习任务和智能操作,这些都不在特定程序的范围内。
操纵器:它是一种固定或移动的机器,其结构通常由一系列相互连接或相对滑动的部分组成。工作模式主要通过沿 X、Y 和 Z 轴的直线运动来达到目标位置。抓取或移动物体可以实现自动控制、可重复编程和多个自由度(轴)。操纵器可以是自动的或人为控制的。它是一个模拟人手和手臂动作的机电系统。它只是人手和手臂的延伸。它没有自主能力。它附着在主机设备上。它有简单的动作和固定的操作程序。重复操作。操作设备具有不变的定位点。操纵器是机器人技术领域广泛使用的机械设备,在工业、医疗甚至军事等领域都有广泛应用。操纵器分为四轴、五轴、六轴和多轴,3D/2D 机器人,独立操纵器,液压操纵器等。尽管有许多类型,但它们的共同点是可以接收指令并定位到三维(或二维)空间点来执行操作。
机器人:我经常谈论工业机器人。工业机器人是自动化设备。它们有许多形式,操作器只是其中之一。它可以编程,但通常与末端执行器(操作器)组装在一起,形成一个完整的机器;工业机器人是一个整体,而操作器只是一小部分。工业机器人依靠自身的动力和控制能力来执行工作。它可以接受人类命令,也可以根据预先安排的程序运行,还可以根据人工智能技术制定的原则和指导方针行动。工业机器人通常有独立的控制器、驱动系统和操作界面,可以手动和自动操作和编程。因此,它是一个可以独立运行的完整设备,可以通过自己的控制系统实现所需的功能。设备具有独立的机械机构和控制系统,可以自主运行,动作复杂,工作自由度更高,操作程序可变,是一种可以随意定位的自动操作机器。
如果一个人是工业机器人,人的手就像是一个操作器。通常在工业领域,机器人和操作器都使用固定基座,没有行走机制。
https://www.arcsecdrive.com/news/what-is-the-difference-between-a-robot-and-a-manipulator.html
The difference between robotic arms and industrial robots
机器人手臂与工业机器人之间的区别
Manipulator is a kind of mechanical device, which can be either active or man-controlled; industrial robot is a kind of automated equipment, manipulator is a type of industrial robot, and industrial robots also have other methods. So even though the two have different meanings, they refer to overlapping parts.
操作器是一种机械装置,可以是主动的或人为控制的;工业机器人是一种自动化设备,操作器是工业机器人的一种类型,而工业机器人也有其他方法。所以,尽管这两者有不同的含义,它们指的是重叠的部分。
So in short, there are many ways of industrial robots, and the robotic arm is only one of them.
所以简而言之,工业机器人有很多种方式,机械臂只是其中之一。
Industrial robotic arm 工业机器人臂
An industrial robotic arm is "a fixed or mobile machine. Its structure is usually composed of a series of interlinked or relatively sliding parts for grabbing or moving objects. It can complete active control, repeatable programming, and multiple degrees of freedom. (Axis). The work method is mainly through linear motion along the X, Y, and Z axes to reach the target position."
工业机器人臂是"一个固定或移动的机器。其结构通常由一系列相互连接或相对滑动的部分组成,用于抓取或移动物体。它可以完成主动控制、可重复编程和多个自由度(轴)。工作方法主要是通过沿 X、Y 和 Z 轴的直线运动到达目标位置。"
Industrial robot 工业机器人
According to the definition of ISO 8373, an industrial robot is a machine device that actively performs tasks. It is a machine that performs various functions by its own power and control capabilities. It can withstand the command of human beings, and can also operate in accordance with pre-arranged programs. Modern industrial robots can also act in accordance with guidelines and guidelines established by artificial intelligence technology.
根据 ISO 8373 的定义,工业机器人是一种主动执行任务的机器设备。它是一种通过自身的动力和控制能力执行各种功能的机器。它能够承受人类的命令,并且还可以根据预先安排的程序操作。现代工业机器人还可以根据人工智能技术制定的指导方针和准则行动。
The difference between robots and robotic arms
机器人与机械臂的区别
Manipulator is a widely used mechanical device in the field of robots, which is widely used in industry, medical, military, and space. Manipulators are divided into four axes, five axes, six axes, multi-axis, 3D/2D robots, independent manipulators, hydraulic manipulators, etc. Although there are many types, they have one thing in common is that they can receive instructions and accurately locate three-dimensional (or two-dimensional) ) Point in space for operations.
操作器是机器人领域中广泛使用的机械设备,广泛应用于工业、医疗、军事和航天。操作器分为四轴、五轴、六轴、多轴、3D/2D 机器人、独立操作器、液压操作器等。尽管类型繁多,但它们有一个共同点,那就是能够接收指令并准确定位空间中的三维(或二维)点进行操作。
The difference between a robot and a mechanical arm is that the robot can not only receive instructions from humans, but also perform tasks in accordance with human pre-programmed programs, and can also act according to guidelines specified by artificial intelligence. In the future, robots will assist or replace more human operations, especially some repetitive operations and risky operations.
机器人与机械臂的区别在于,机器人不仅可以接收人类的指令,还可以根据人类预先编程的程序执行任务,也可以根据人工智能指定的指南行动。未来,机器人将协助或替代更多的人类操作,尤其是一些重复性操作和风险性操作。
The definitions of robots in European and American countries and Japan are different:
欧洲和美国以及日本对机器人的定义是不同的:
European and American countries believe that the robot should be controlled by a computer, and programmed to make the robot a multi-function active machine; Japan thinks that the robot is a high-end active machine, so the robotic arm is included in the definition of the robot. European and American countries believe that a robot with 6 axes and above can be called a robot, and a robot with 5 axes and below can only be called a robot; Japan defines a 3-axis robot as a robot.
欧美国家认为机器人应该由计算机控制,并编程使机器人成为多功能的活动机器;日本认为机器人是一种高端的活动机器,因此在机器人的定义中包括了机械臂。欧美国家认为拥有 6 个轴以上的机器人才能被称为机器人,而拥有 5 个轴及以下的只能被称为机械臂;日本则将 3 轴机器人定义为机器人。
At present, the concept of robots in the world has basically become the same, and they all think that robots are an automated machine that performs various functions on its own power and control capabilities.
目前,世界上对机器人的概念基本上已经统一,人们都认为机器人是一种自动化机器,能够依靠自身的动力和控制能力执行各种功能。
The difference between robot and manipulator in the scope of application:
应用范围内机器人与操纵器的区别:
Robotic arms are widely used in the industry. The primary technology it contains is drive and control. Robotic arms are generally in series.
机器人手臂在工业中被广泛使用。它包含的主要技术是驱动和控制。机器人手臂通常是串联的。
Robots are mainly divided into series structure and parallel structure: Parallel robots (PM) are mostly used in occasions that require high rigidity, high precision, high speed and no large space. They are used in detail in sorting, handling, imitating motion, parallel machine tools, and metal cutting. , Robot joints, spacecraft interfaces, etc.; series robots and parallel robots form a complementary relationship in application. The series robots have a large working space and can prevent the coupling effect between the drive shafts. However, each axis of the mechanism must be controlled independently, and encoders and sensors are needed to improve the accuracy of the movement.
机器人主要分为串联结构和并联结构:并联机器人(PM)多用于需要高刚性、高精度、高速度且不需要大空间的场合。它们在分拣、搬运、模仿运动、并联机床和金属切割、机器人关节、航天器接口等方面有详细的应用;串联机器人和并联机器人在应用中形成互补关系。串联机器人具有较大的工作空间,可以防止驱动轴之间的耦合效应。然而,机构的每个轴都必须独立控制,需要编码器和传感器来提高运动的准确性。
https://www.sunzontech.com/item/the-difference-between-robotic-arms-and-industrial-robots
从研发难度角度详细解析工业机器人(industrial robot)、工业机械手(industrial manipulator)、机械臂(robotic arms)的区别
从研发难度的角度来看,工业机器人、工业机械手和机械臂在技术复杂性、成本和应用场景上有显著的区别:
- 工业机器人 (Industrial Robot):
-
技术复杂性 : 工业机器人通常具有多个自由度(如六轴或更多),需要复杂的运动控制算法、精密的传感器和高性能的伺服系统1。研发过程中涉及到机械设计、电子控制、软件编程等多学科的综合应用。
-
成本 : 工业机器人的研发成本较高,主要因为其核心零部件(如减速器、伺服电机和控制器)大多依赖进口1。此外,工业机器人需要高精度和高可靠性的组件,这进一步增加了成本。
-
应用场景 : 工业机器人广泛应用于汽车制造、电子装配、金属加工等领域,要求其具备高精度、高速度和高重复性的操作能力1。
工业机械手 (Industrial Manipulator):
-
技术复杂性 : 工业机械手的技术复杂性相对较低,通常具有较少的自由度(如三轴或四轴),主要用于简单的搬运和装配任务2。其控制系统和传感器要求相对较低,编程和调试也较为简单。
-
成本 : 工业机械手的研发成本较低,主要因为其结构简单,所需的核心零部件较少2。此外,工业机械手通常不需要高精度的组件,这也降低了成本。
-
应用场景 : 工业机械手主要用于需要高重复性和高精度的任务,如电子产品装配、精密仪器制造等2。
机械臂 (Robotic Arm):
-
技术复杂性 : 机械臂的技术复杂性介于工业机器人和工业机械手之间。根据应用需求,机械臂可以具有多个自由度,并配备复杂的传感器和控制系统3。柔性机械臂的研发难度较大,因为需要解决材料的非线性特征和精确控制问题3。
-
成本 : 机械臂的研发成本取决于其复杂性和应用场景。高端机械臂(如柔性机械臂)的成本较高,因为需要高性能的材料和复杂的控制系统3。
-
应用场景 : 机械臂广泛应用于医疗手术、实验室操作、教育培训等领域,要求其具备灵活性和精确性3。
希望这些信息对你有帮助!你对哪种类型的机器人研发更感兴趣呢?
2: 百度百科 - 工业机械手 1: 36氪 - 2023年中国工业机器人行业研究报告 3: 中国科学报 - 柔性机器人手臂
¹: 百度百科 - 工业机械手(https://baike.baidu.com/item/工业机械手/8877696)
⁴: 36氪 - 2023年中国工业机器人行业研究报告(https://www.36kr.com/p/2213026213688708)
⁹: 中国科学报 - 柔性机器人手臂(https://ai.ustc.edu.cn/2024/0604/c36412a642976/page.htm)
源: 与 Copilot 的对话, 2024/7/12
(1) 2023年中国工业机器人行业研究报告-36氪. https://www.36kr.com/p/2213026213688708.
(2) 工业机械手 - DALMEC- Industrial Manipulators and Material .... https://www.dalmec.com/zh-hans/工业机械手/.
(3) 【中国科学报】突破!真正柔软的机器人手臂来了. https://ai.ustc.edu.cn/2024/0604/c36412a642976/page.htm.
(4) 如何选择工业自动化机械手 - 知乎. https://zhuanlan.zhihu.com/p/443228370.
(5) 工业机械手_百度百科. https://baike.baidu.com/item/工业机械手/8877696.
(6) 工业机器人(面向工业领域的机器人)_百度百科. https://baike.baidu.com/item/工业机器人/1290396.
(7) 新闻------全国人大、全国政协将助力解决机器人产业投资大 .... https://bing.com/search?q=工业机器人+industrial+robot+研发难度.
(8) 新闻------全国人大、全国政协将助力解决机器人产业投资大 .... https://www.itrobotgroup.com/zh/news/the-national-peoples-congress-and-the-national-peoples-political-consultative-conference-will-help-solve-the-problem-of-large-investment-in-the-robot-industry-long-production-cycle/.
(9) 工业机器人运用技术-Applied Industrial Robotics. http://old2022.bulletin.cas.cn/zgkxyyk/ch/reader/view_abstract.aspx?file_no=20150612\&flag=1.
(10) 创(da)客(lao)们都想征服的免费开源多轴机械臂 -- 太极创客. http://www.taichi-maker.com/6-axis-robot-arm/.
(11) 软体机械臂控制方法研究现状及展望. http://femt.cnjournals.com/yqyb/article/abstract/J2311572?st=article_issue.
(12) 有"肌肉"有"血管"!波兰团队耗时5年研发逼真仿生机械臂 .... https://www.thepaper.cn/newsDetail_forward_15221947.
(13) 《自制》300个小时踩坑!你也可以做个六轴机械臂!Small .... https://www.bilibili.com/video/BV1uK411p7qz/.
(14) undefined. https://doi.org/10.1177/0278364920979367.
(15) undefined. https://pan.baidu.com/s/1FcXhjypcXKUvZC9-5x2fCg.
(16) undefined. https://pan.baidu.com/s/19hWkRsBwcx7LoFMXDNarfA.
(17) undefined. https://niryo.com/.
(18) undefined. https://pan.baidu.com/s/112aRXIikfuJGO0rCr9v_OQ.
(19) undefined. https://www.anninrobotics.com/.
(20) undefined. https://pan.baidu.com/s/1tu-jdso0nIq7mkJ1hPQ6aA.
(21) undefined. https://www.bcn3dtechnologies.com/en/bcn3d-moveo-the-future-of-learning/.