Ubuntu16.04环境下Baxter机器人开发环境搭建要点说明
前面写过一篇文章,描述了在ubuntu20.04环境下baxter机器人开发环境的搭建,本人在后来的使用中,出于一些原因又在ubuntu16环境下搭建了开发环境,二者总体流程基本类似,但也存在一些差别,主要在对Baxter SDK的安装,和仿真环境的搭建。
Baxter SDK的安装
根据官网资料《Baxter研究版操作手册》,第22页
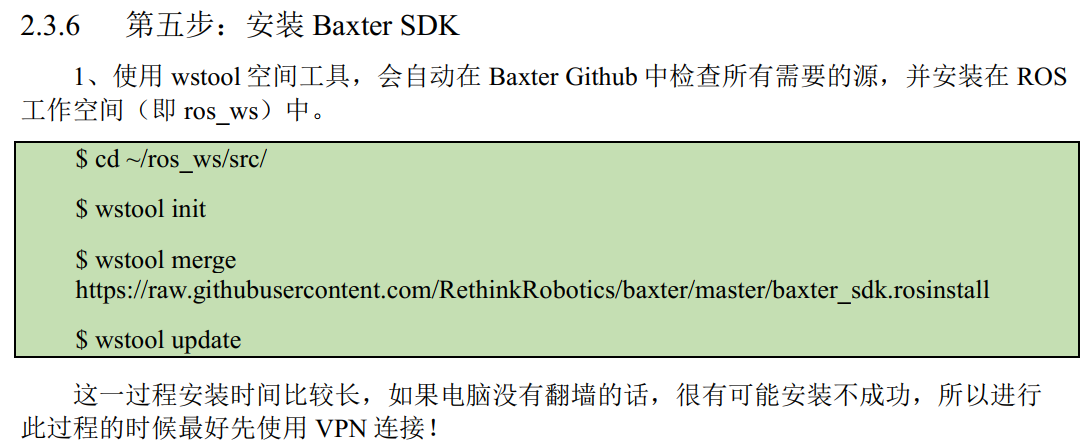
这里说到wstool merge https://raw.githubusercontent.com/RethinkRobotics/baxter/master/baxter_sdk.rosinstall 安装时间比较长,甚至可能安装不成功,实验确实如此。如果实在下载不成功,一个可行的解决办法是:登录这个网页查看内容:
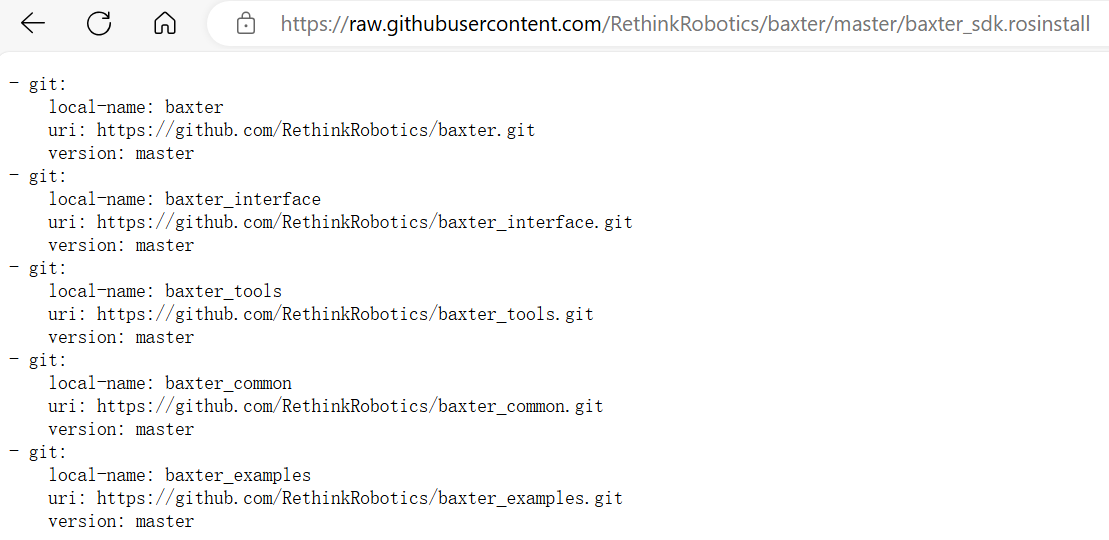
发现这里提供了五个git仓库,我们根据网址信息下载对应的ROS包,直接放到~/ros_ws/src/ 目录下就好,效果和使用wstool工具一致,注意分支信息。
仿真环境的搭建
在ubuntu20中,官网直接提供了从实物到仿真所需的所有包,你只需下载前文的网盘链接就好。
在ubuntu16下,如果你成功执行了wstool merge https://raw.githubusercontent.com/RethinkRobotics/baxter/master/baxter_sdk.rosinstall ,在运行仿真时你会发现缺少仿真包,这时可以通过RethinkRobotics/baxter_simulator at kinetic-devel (github.com)进行下载。
小结
与别的教程相比,本文与上一篇环境搭建教程都是直接基于官方文档进行的说明,并做了细节补充。建议大伙可以去官网下载资料或者基于baxter的wiki网址进行学习。
此外,在ubuntu16搭建开发环境时,我碰到过一些编译报错(如moveit安装,gazebo必要模型下载等),因为本文是后期整理,我没有留下记录,大伙碰到问题时可以在网上查阅一下,印象里都还算好解决。