-
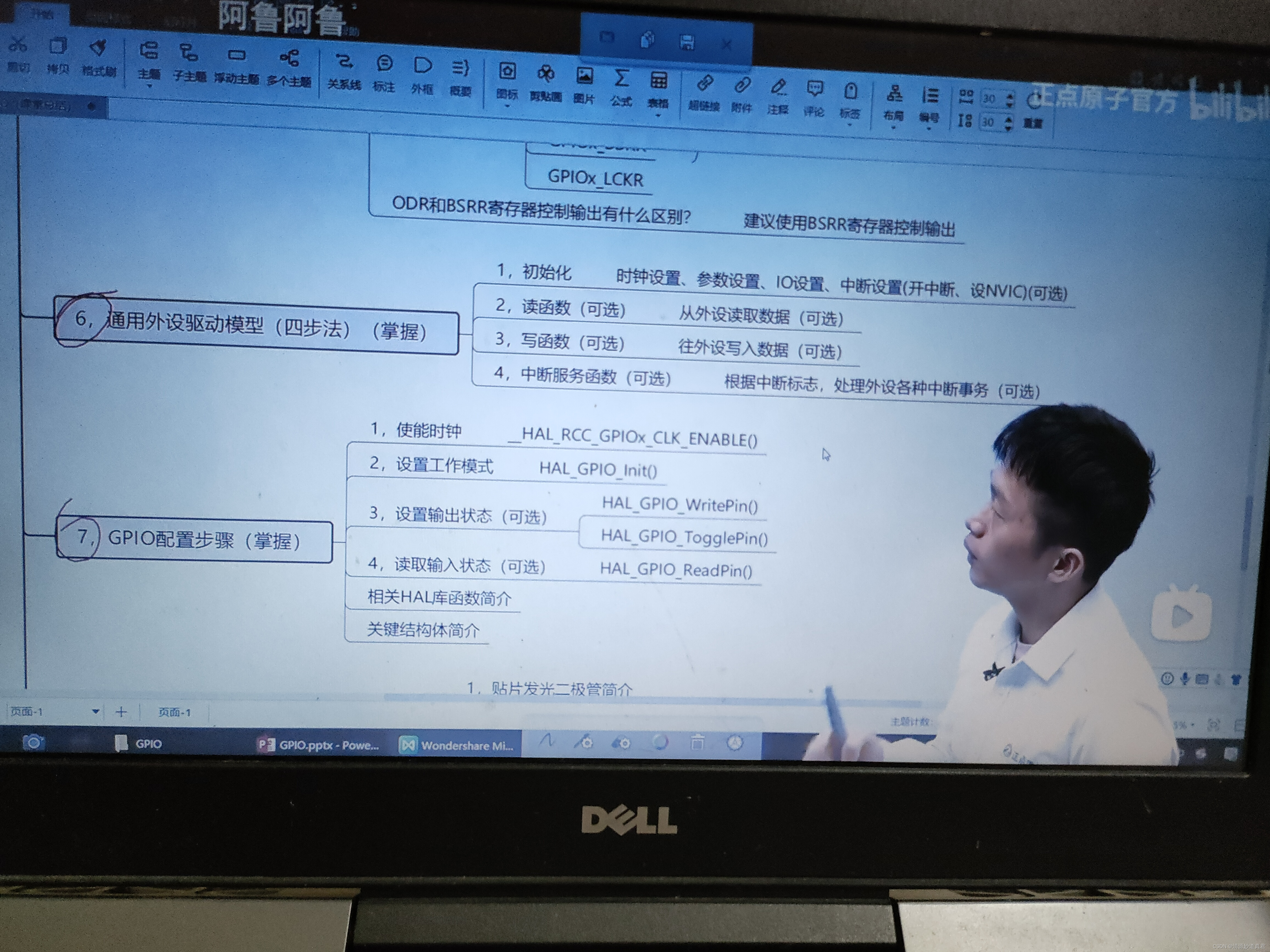
这个是通用外设驱动模式配置 除了初始化是必须的 其他不是必须的
-
gpio配置步骤 1.使能时钟是相当于开电 2.设置工作模式是配置是输出还是输入 是上拉输入还是下拉输入还是浮空 是高速度还是低速度这些 3 和 4小点就是读写io口的状态了
-
这个图是正点原子 将GPIO 的时候的ppt 大概是手把手教你学会hal库的 45讲 开始的这个ppt 反正就是gpio这个ppt
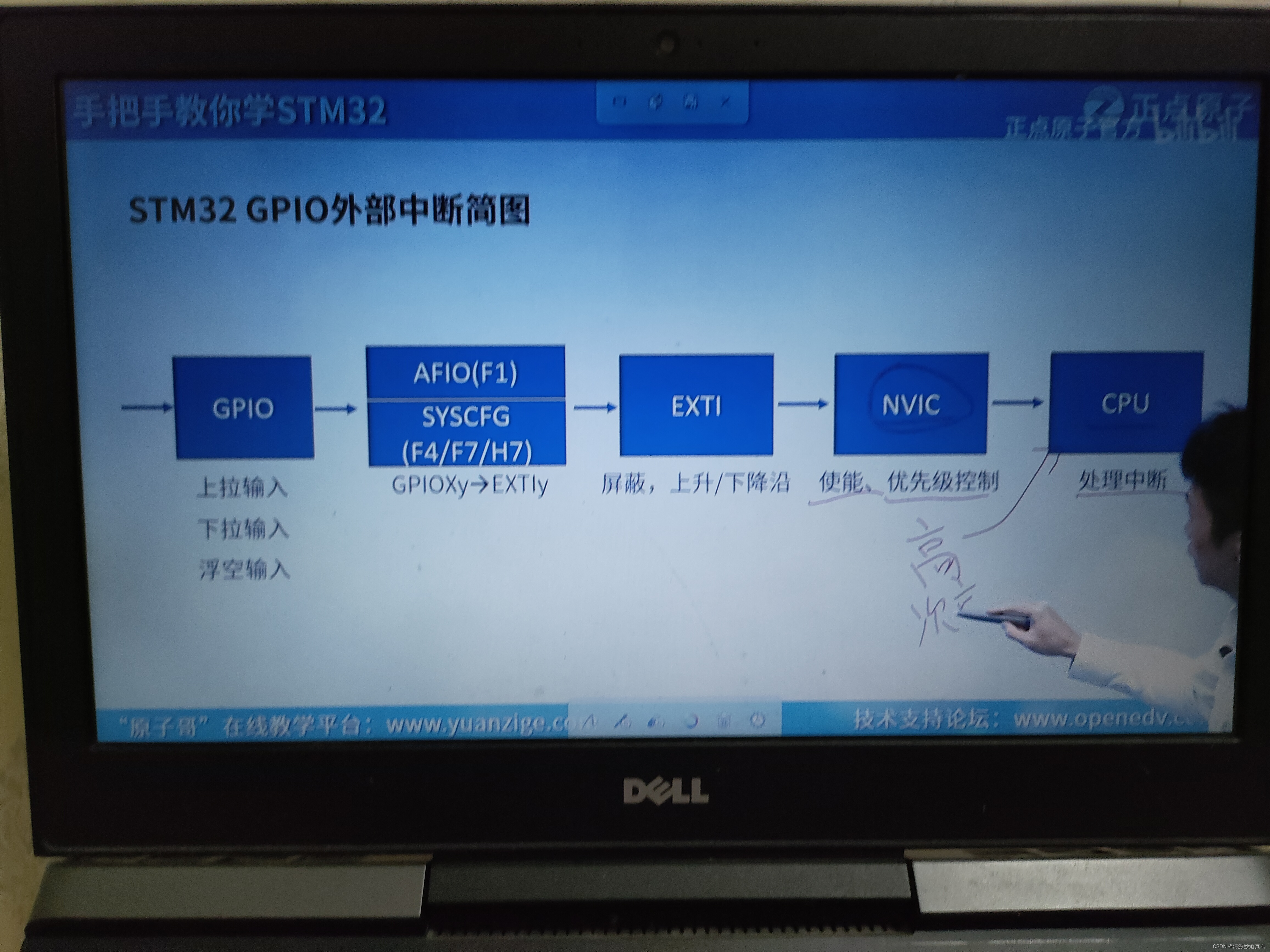
- 这个是 中断的内容了 ,不是gpio的内容,讲完了gpio以后,讲的中断,这个讲的是 外部中断怎么配置的,就是gpio到外部中断到nvic ,可以把外部中断exti理解成nvic的下属,nvic 存中断服务函数的地址,然后中断服务函数就是处理中断的函数
5.这个图是 正点原子讲中断的内容 第53讲开始的
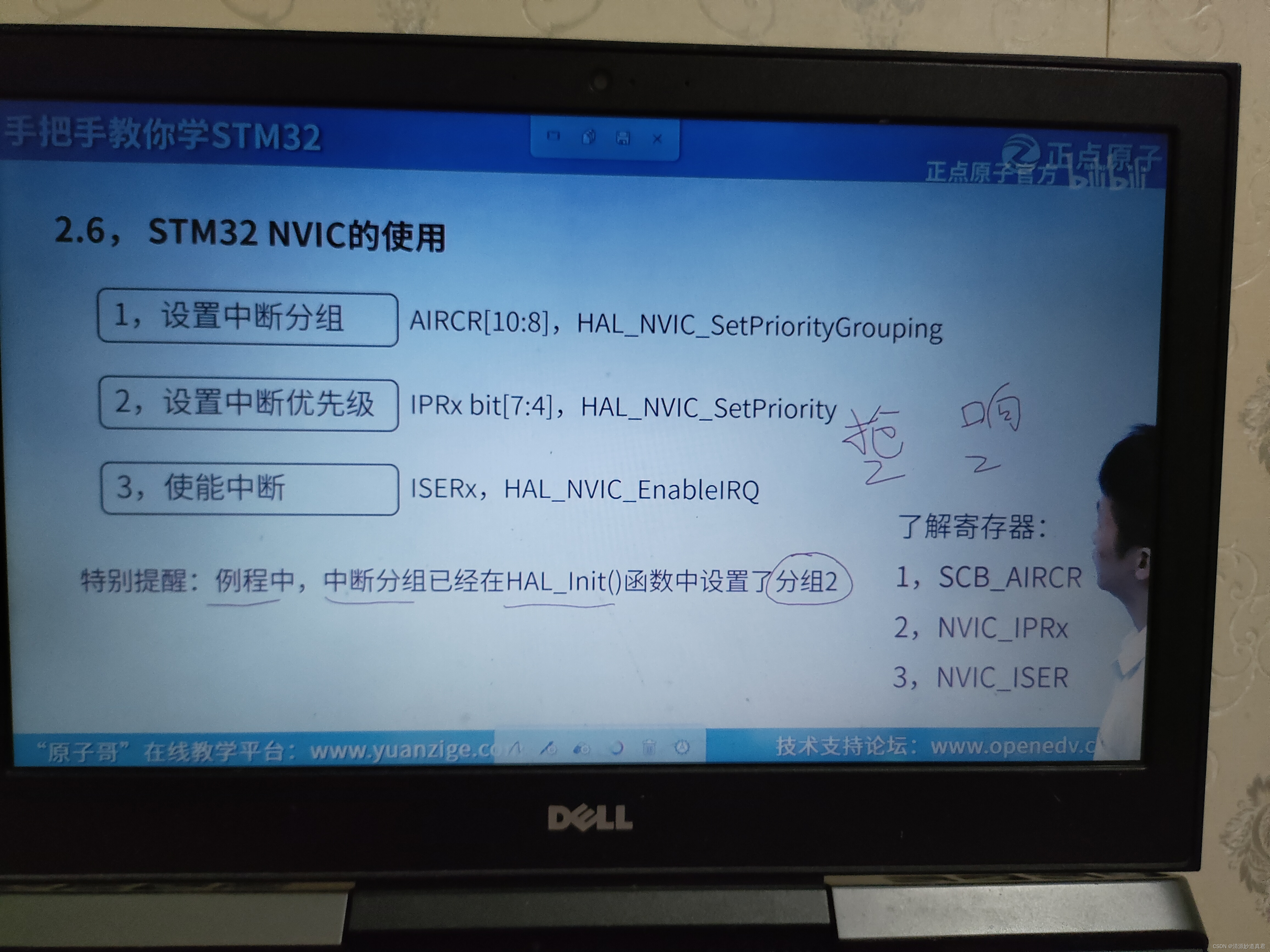
6.这个是 nvic的配置
1.第一个小点 设置中断分组 ,在代码里面只需要设置一次就可以了,不需要多次设置
2.设置中断优先级函数,这个函数里面有三个参数 ,第一个参数是中断名称,第二个是抢占优先级,第三个参数是响应优先级也就是子优先级,
优先级判断是 抢占优先级>响应优先级>自然优先级 (这个好像漏了一个优先级)
3第三个小点就是使能中断了 ,中断不使能 也是没办法使用的