文章目录
-
- [1. 前言](#1. 前言)
- [2. 问题描述](#2. 问题描述)
- [3. 理论分析](#3. 理论分析)
-
- [3.1 NSD8381如何连接电机](#3.1 NSD8381如何连接电机)
- [3.2 S32K144和NSD8381的软件配置](#3.2 S32K144和NSD8381的软件配置)
- 4.测试验证
-
- [4.1 测试环境](#4.1 测试环境)
- [4.2 测试效果](#4.2 测试效果)
- [4.3 测试记录](#4.3 测试记录)
1. 前言
最近有客户在使用S32K144+NSD8381驱动电子膨胀阀时,遇到无法正常驱动电子膨胀阀的情况。因为笔者也是刚开始使用NSD8381,无法线上支持这类实际应用问题,所以让客户提供了一个电子阀,自己搭建环境进行测试。
2. 问题描述
客户电子膨胀阀的阀针安装位置比较隐蔽,需要通过注水观察水的流动情况,判断阀门是否打开关闭。之前也给客户提供了NSD8381的驱动代码,以及相关的文档说明,如下所示,
但是客户反馈,按照文档的步骤配置NSD8381之后,无论给CTRL1引脚发送多少脉冲,阀门始终无法关闭,即注水都会流出。
3. 理论分析
关于S32K144+NSD8381无法驱动电机的场景,主要有两种可能,一个是NSD8381的寄存器配置有误,或者NSD8381和电机的接线有问题。
针对NSD8381配置有误的可能性,客户有测试更改过NSD8381的步进电机模式(1/16细分改为1/2),运行电流(576mA更改1.3A)等参数,现象仍然一致,并且读了SPI的返回值,最高字节为0x80,说明寄存器配置有正确写入。
针对NSD8381和电机的连线,发现和NSD8381的时序不一致,详细情况如下描述。
3.1 NSD8381如何连接电机
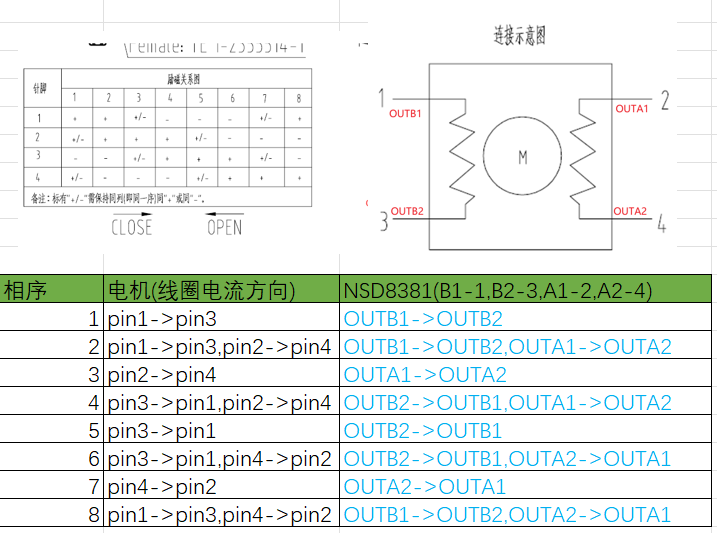
客户的电子膨胀阀的运行时序如下左图,当前的NSD8381的输出引脚和电机的连线如下有图。
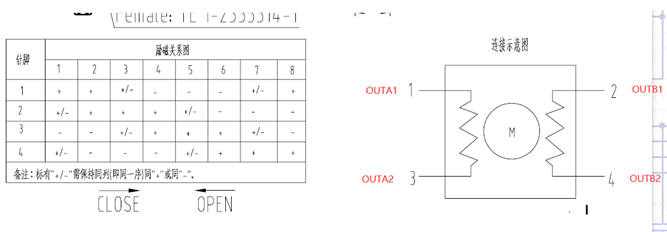
- 从横轴看左上图,1到8为阀门关闭的相序,8到1为阀门打开的相序;
- 从纵轴看左上图,1,2,3,4分别为电机四根引线的输入电平要求;
- 右上图显示NSD8381和电机的连线情况为:OUTA1、OUTA2连接电机的1、3号引线,OUTB1、OUTB2连接电机的2、4号引线。
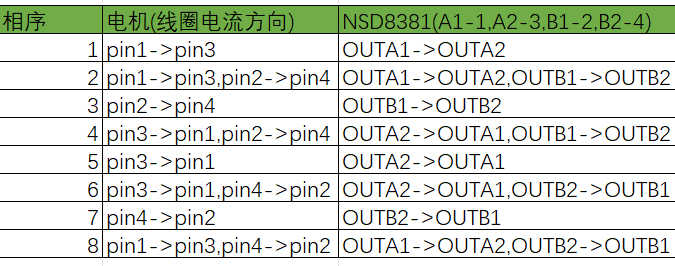
按照上图的连线方式,对应的NSD8381输出引脚需要的相序如下表格最右列。
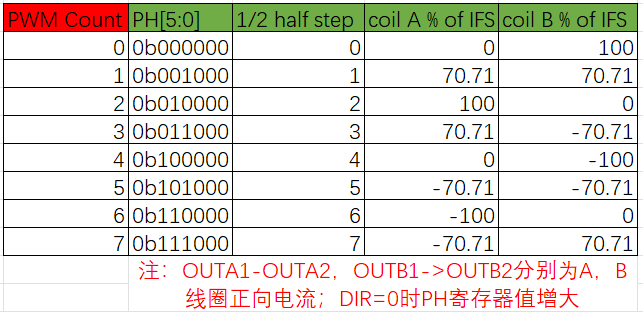
翻看NSD8381数据手册,1/2微步模式下的芯片的相序如下:
为了让电机相序和NSD8381的相序一致,需要NSD8381和电机的接线方式修改,修改后的接线方式为:
- OUTB1、OUTB2连接电机的1、3号引线,OUTA1、OUTA2连接电机的2、4号引线
按如上描述修改接线方式后,对应的NSD8381输出引脚需要的相序如下表格:
另外,客户提供的电机参数表中,和驱动电路相关的参数如下红框所示:
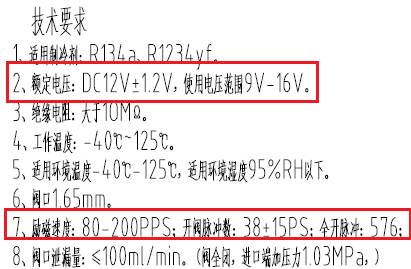
对应的驱动NSD8381配置为:
- 供电电压为12系统;
- 1/2微步模式下,CTRL1引脚的PWM频率在80-200Hz;
- 1/2微步模式下,阀门从完全关闭到完全打开的PWM脉冲数为576,从完全关闭到打开阀门,需要38±15个PWM脉冲。
针对这些需求,需要基于前文《基于S32K144驱动NSD8381》分享的代码做一些修改。详细情况如下描述。
3.2 S32K144和NSD8381的软件配置
- 因为需要计算PWM的脉冲数,所以需要增加PWM计数功能。代码修改如下。
- 增加FTM2通道5的中断使能;
c
FTM_DRV_EnableInterrupts(INST_FLEXTIMER_PWM1, FTM_CHANNEL5_INT_ENABLE);- 增加对应的中断处理函数,在里面增加PWM计数功能;
c
volatile uint16_t PWM_Count = 0;
void FTM2_Ch4_Ch5_IRQHandler(void)
{
PWM_Count++;
FTM_DRV_ClearStatusFlags(INST_FLEXTIMER_PWM1,FTM_CHANNEL5_FLAG);
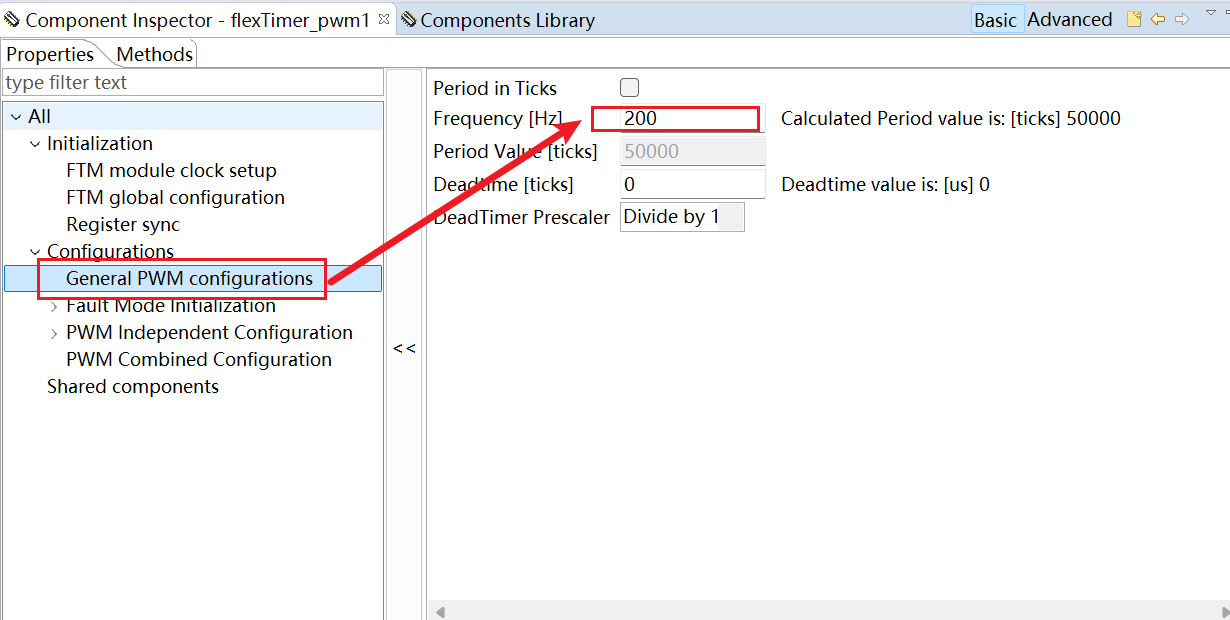
}- 需要将PWM的频率修改为200Hz,修改下图形化配置即可。
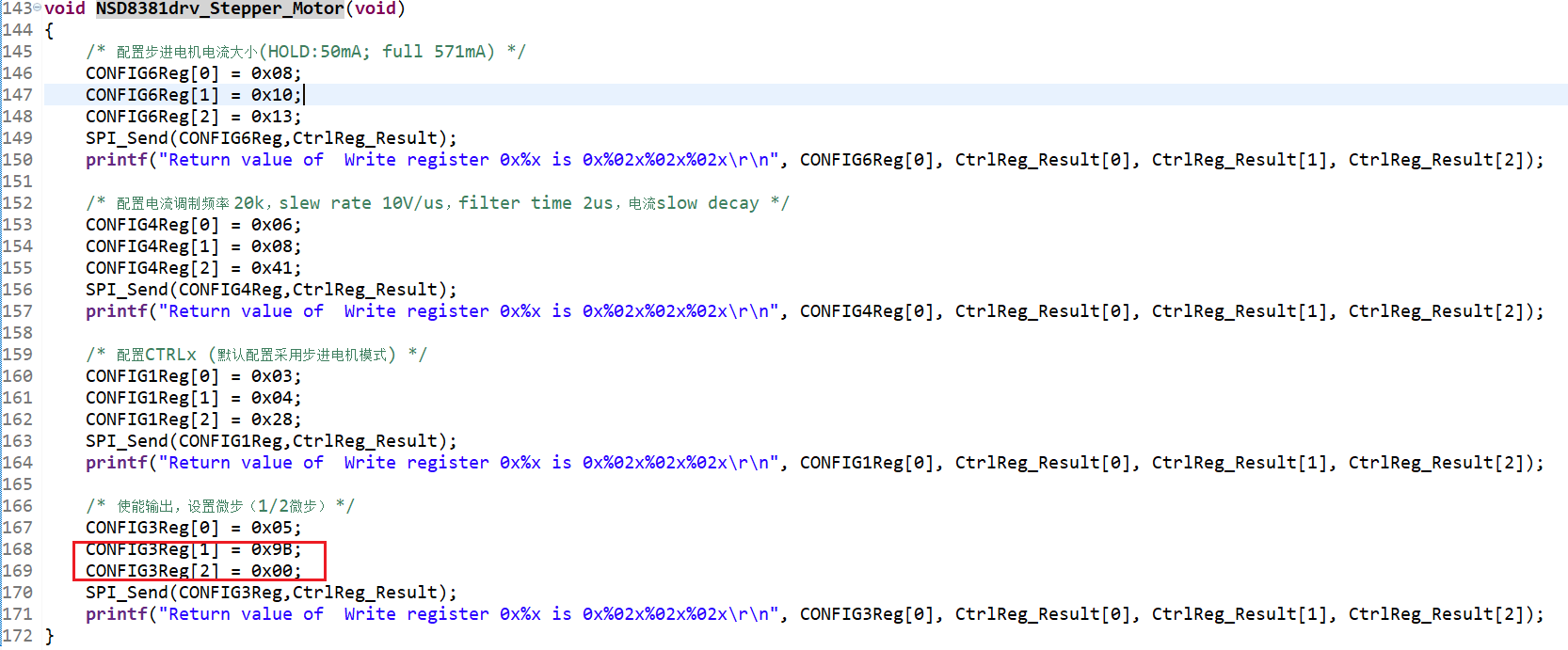
- NSD8381的初始化函数中,需要修改步进电机模式为1/2微步,修改如下红框,即对CONFIG3寄存器赋值0x9B00。
- 在while(1)循环中,增加如下功能:
-
增加PWM计数处理逻辑,以及和PH5:0寄存器值的获取,用于判断NSD8381是否处于1/2微步模式,以及达到预定的PWM脉冲后,停止CTRL1引脚的脉冲输入。
-
增加按键按下处理逻辑,按下SW2,将CTRL2引脚拉低(DIR为0),输入PWM波到CTRL1引脚;按下SW3,将CTRL2引脚拉高(DIR为1),输入PWM波到CTRL1引脚。
-
如果希望电机整体功耗降低,可以增加Hold模式,当电机停止转动,开启Hold模式,此时消耗的电流远远小于RUN模式的电流。
对应的代码如下:
C
while(1)
{
Phase_Count = NSD8381drv_GetPH();
/* 励磁速度,80-200pps(每秒钟的脉冲数)
* 开阀脉冲数38±15PS,全开脉冲576
* */
/* 测试步进电机模式是否正确配置,1/2微步的时候,PWM计数4,PH[5:0]计数0b100000,即32*/
if(PWM_Count == 4)
{
printf("PWM Count is %d\r\n", PWM_Count);
printf("Phase Count is %d\r\n", Phase_Count);
}
if(PWM_Count == 576)
{
NSD8381drv_HOLDM_En(ENABLE);
FTM_DRV_DeinitPwm(INST_FLEXTIMER_PWM1);
printf("PWM Count is %d\r\n", PWM_Count);
printf("Phase Count is %d\r\n", Phase_Count);
PWM_Count = 0;
}
/* SW2 press */
if(SW2_Press_Flag)
{
SW2_Press_Flag = false;
printf("SW2 press!\r\n");
/* Increment phase counter, clockwise */
NSD8381drv_CTRL2_Dir(clockwise);
/* Hold mode -> Run mode */
NSD8381drv_HOLDM_En(DISABLE);
/* FTM2 CH5 use PWM mode,freq:200Hz */
FTM_DRV_InitPwm(INST_FLEXTIMER_PWM1, &flexTimer_pwm1_PwmConfig);
}
/* SW3 press */
if(SW3_Press_Flag)
{
SW3_Press_Flag = 0;
printf("SW3 press!\r\n");
/* decrement phase counter, counter-clockwise */
NSD8381drv_CTRL2_Dir(counter_clockwise);
/* Hold mode -> Run mode */
NSD8381drv_HOLDM_En(DISABLE);
/* FTM2 CH5 use PWM mode,freq:200Hz */
FTM_DRV_InitPwm(INST_FLEXTIMER_PWM1, &flexTimer_pwm1_PwmConfig);
}
}关于其中几个函数的实现,如下所示:
c
/* read phase counter */
uint32_t NSD8381drv_GetPH(void)
{
uint32_t Rsult;
CONFIG3Reg[0] = (uint8_t)(0x85U);
Parity_check(CONFIG3Reg);
SPI_Send(CONFIG3Reg, StatReg_Result);
StatReg_Result[2] &= 0x7F;
Result = (uint32_t)(StatReg_Result[2] >> 1);
return Result;
}
/*set NSD8381 CONFIG_3 HOLD_EN bits*/
void NSD8381drv_HOLDM_En(FunctionalState_TypeDef EN)
{
if(EN==ENABLE)
{
CONFIG3Reg[1]|=NSD8381_HOLDM; //0x40
}
else
{
CONFIG3Reg[1]&=(uint8_t)(~NSD8381_HOLDM);
}
CONFIG3Reg[0] = (uint8_t)(0x05U);
CONFIG3Reg[2]&=(uint8_t)(0xFE);
Parity_check(CONFIG3Reg);
SPI_Send(CONFIG3Reg, CtrlReg_Result);
}
/* set NSD8381 CTRL2 pin level when used for dir status
* 0: Increment phase counter, clockwise
* 1: decrement phase counter, counter-clockwise
* */
void NSD8381drv_CTRL2_Dir(DirStatus_TypeDef EN)
{
PINS_DRV_WritePin(NSD8381_CTRL2_PORT, NSD8381_CTRL2_PIN, EN);
}4.测试验证
4.1 测试环境
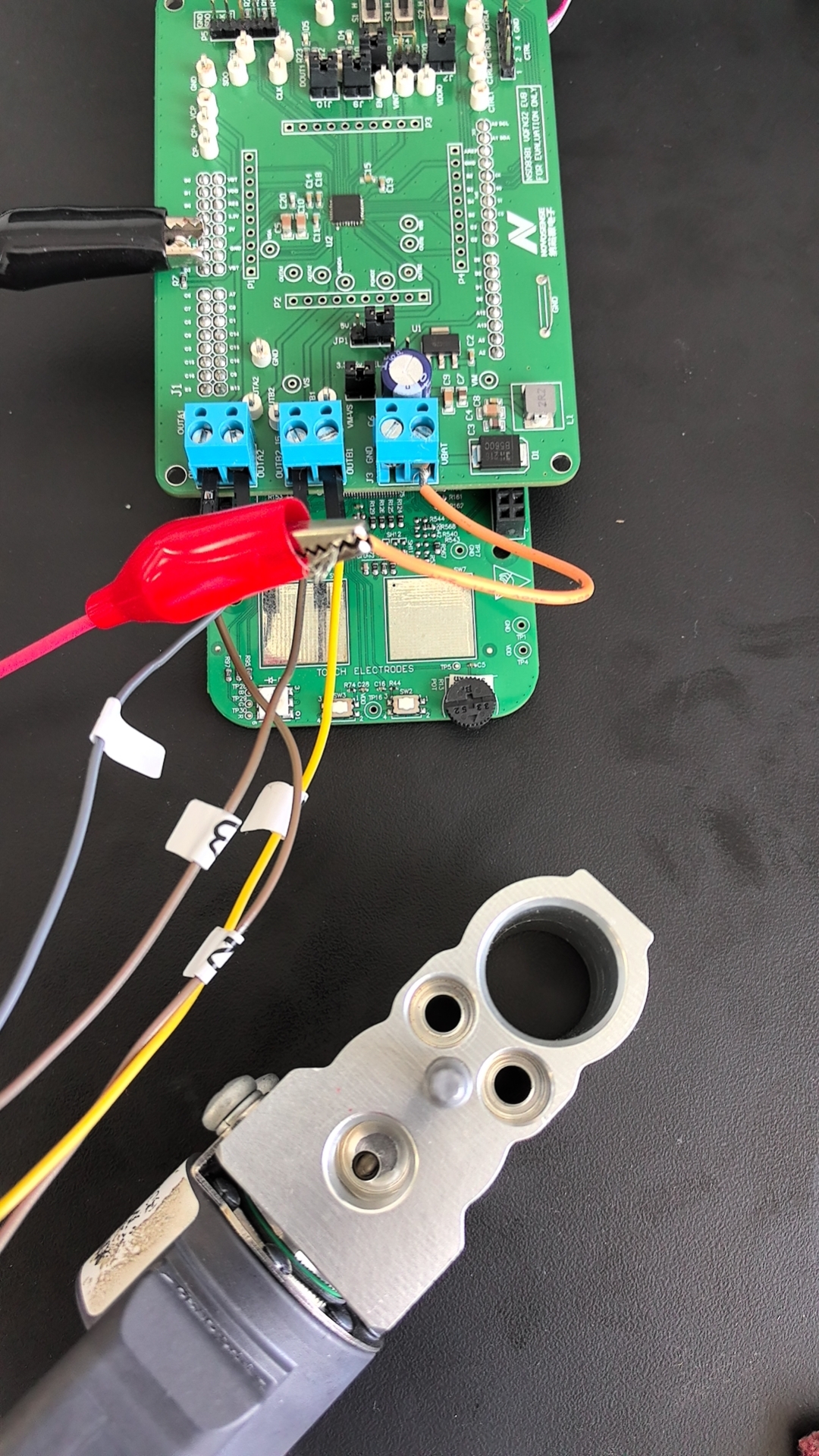
整个测试的环境如下图:
4.2 测试效果
实际的测试效果如下视频,
- 当按下SW2时,阀门完全关闭,此时注入水不会流出;
- 接着按下SW3,阀门完全打开,注入水会加速流出。
NSD8381驱动电子膨胀阀
4.3 测试记录
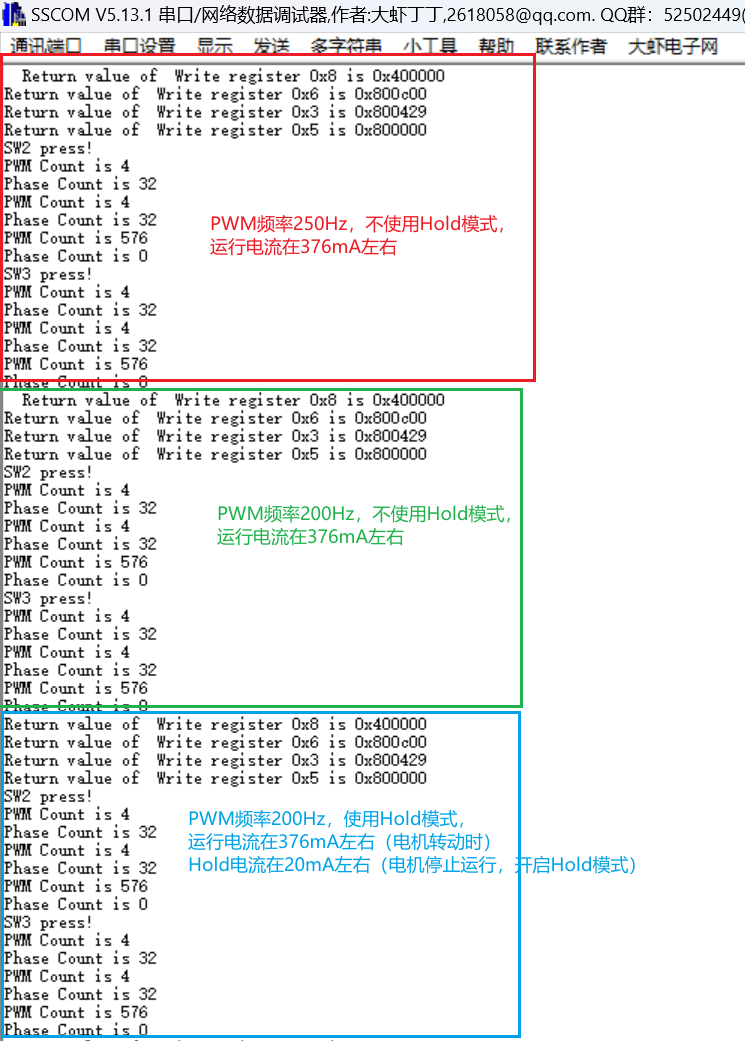
实际测试时串口打印的数据如下图,
- 第一个操作的寄存器的高8bit返回值为0x40,因为有reset事件;如果第一个操作的寄存器高8bit返回值为0x00,可能是NSD8381还没初始化完成,建议在EN引脚拉高后,延迟200us再发送SPI命令给NSD8381。
- 当PWM计数为4时,对应的PH5:0为0x32,即0b100000,和相序表一致,说明处于1/2微步模式。
- 使用250Hz的PWM波,也可以正常驱动该电磁阀,说明该电机兼容性比参数表更好。
- 使用HOLD模式时的电流远小于RUN模式,有助于降低NSD8381的功耗。