场景痛点:
缺少飞手,导致无人机应用频次偏低
无人机需要人工换电池、维护及存储
日常巡逻 | 无人机补盲巡逻
大疆航点飞行功能,重复性任务只飞一遍,后续重复调用
无人机航点规划,一次设置,后续重复调用。
每个航点可单独设置指令,可自动拍照,录像,悬停,调整无人机朝向等指令。
针对重要区域如出入口,停车场,消防通道等重要设施区域可设置 额外航点重点巡查,记录照片或视频数据并存档。



航线同步大疆机场,实现无人值守自动巡逻

轻量化设计
展开状态:1675 mm*895 mm*530mm
闭合状态:805 mm*895 mm*840 mm
重量:仅90kg,仅需地面固定、接入电源和网络,并通过
DJI RC Plus遥控器快速配置,即可完成布署。
日夜兼程
大疆机场搭配TEC 空调系统可在-35° 至50°的环境中正 常作业。
无惧风雨
整体系统具备IP55的 防护等级,核心部件 具备IP67的防护等级, 降落风力可达12m/s。

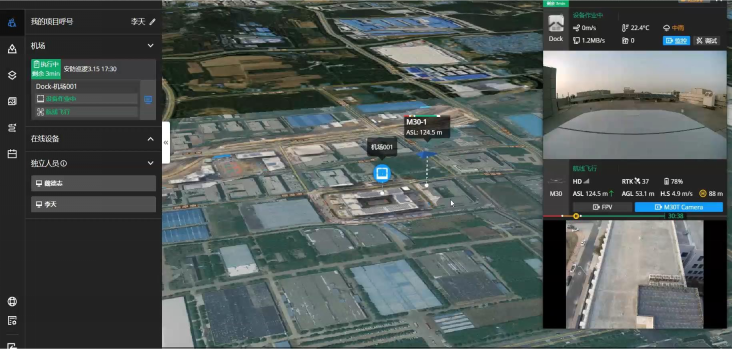
自动化巡逻 | 巡逻区域规划航线

自动化巡逻 | 设定巡检任务

自动化巡逻 | 现场实飞案例