电动六旋翼无人机,该无人机采用横向折叠臂,性能优秀、操控简单、安全性高,适合用于基础多旋翼飞行技能训练。同时,该无人机符合《民用无人机驾驶员管理规定》中关于多旋翼无人机训练类别的要求,可用于多旋翼无人机实践飞行训练。

- 飞行原理与结构
CAAC(中国民用航空局)认证的小型六旋翼训练无人机,其飞行原理基于多旋翼系统的反扭矩与升力平衡。六个旋翼通过不同转速产生向上的升力,同时利用旋翼的旋转反作用力实现无人机的水平移动、垂直起降、悬停及方向控制。这种设计使得六旋翼无人机具备高度的机动性和稳定性,非常适合进行各种训练任务。
小型六旋翼训练无人机主要由机身、旋翼臂、旋翼、电机、电池、飞行控制系统、传感器(如GPS、陀螺仪、加速度计等)、摄像头(可选)及通信系统等组成。机身采用轻质高强度材料制造,以减轻重量并提升结构强度。旋翼臂对称分布,确保飞行中的动力平衡。
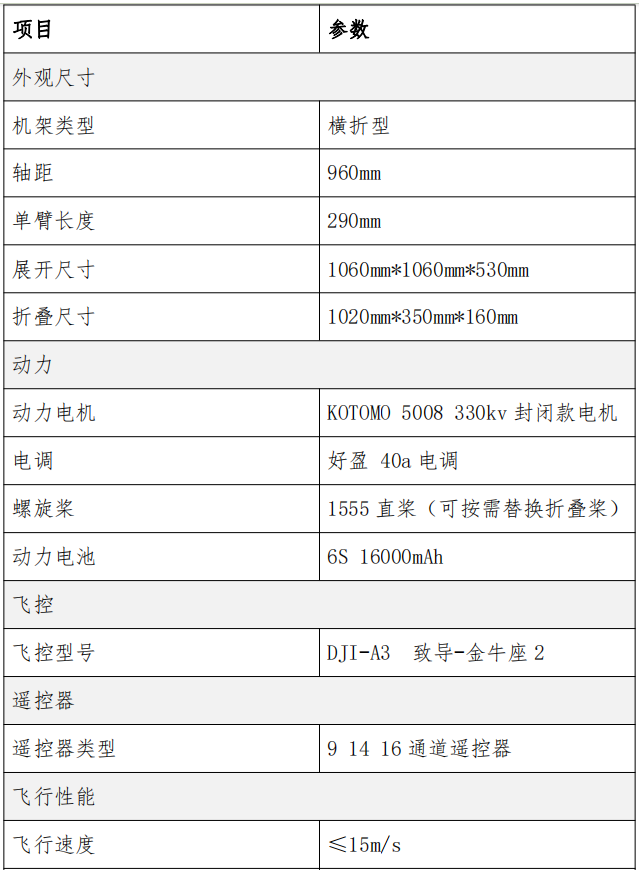
- 飞行性能与参数

CAAC认证的小型六旋翼无人机通常具备以下飞行性能参数:
最大起飞重量:根据不同型号和设计,一般在2-5kg之间。
最大载荷能力:可携带一定重量的任务设备,如高清相机、红外热像仪等。
续航时间:单次充电后的飞行时间,一般在20分钟至1小时不等,取决于电池容量和飞行模式。
飞行速度:最大水平飞行速度可达每秒数米至十几米不等。
悬停精度:在GPS辅助下,可实现厘米级悬停精度。
飞行高度:受法规限制,通常不超过120米(在大多数国家)。
- 技术特点
高稳定性:六旋翼设计提供了良好的飞行稳定性,适合进行复杂飞行动作训练和拍摄。
易操作性:通过直观的遥控器或地面站软件,操作员可以轻松控制无人机的飞行。
模块化设计:便于快速更换电池、维修和升级部件。
集成度高:集成多种传感器和控制系统,实现自主避障、精准定位等功能。
- 控制系统
CAAC小型六旋翼无人机的控制系统是其核心,包括飞行控制板(FCU)、传感器阵列和通信模块。飞行控制板负责处理来自传感器的数据,并根据预设的飞行算法发出控制指令,调整电机的转速和旋翼的倾斜角度,以实现无人机的稳定飞行和精确控制。同时,通过无线通信模块与遥控器或地面站进行数据交换,实现远程操控和监控。
- 培训与考核
为确保无人机操作的安全性和专业性,CAAC及相关培训机构提供了系统的培训与考核体系。培训内容涵盖无人机基础知识、飞行原理、操作技能、安全规范、应急处理等多个方面。学员需通过理论考试和实操考核,获得相应的飞行执照或操作资质后,方可合法合规地操作无人机。
- 应用领域
CAAC小型六旋翼训练无人机广泛应用于多个领域:
教育培训:作为飞行训练平台,用于培养无人机驾驶员和操作人员。
航拍摄影:携带高清相机进行空中拍摄,适用于影视制作、广告宣传等。
- 环境监测:搭载特定传感器进行空气质量、水质、土壤等环境监测。
农业植保:喷洒农药、施肥等农业作业,提高农业生产效率。
应急救援:在自然灾害、事故现场进行空中侦察和救援物资投放。
- 维护与保养
定期维护和保养对于保持无人机的良好性能和延长使用寿命至关重要。维护工作包括:
清洁检查:定期清洁无人机表面和旋翼,检查机身和旋翼臂有无损坏。
电池管理:正确使用和存储电池,避免过充过放,定期进行电池健康度检查。
传感器校准:定期对GPS、陀螺仪等传感器进行校准,确保飞行数据准确。
软件更新:及时升级飞行控制软件和遥控器固件,以获取更好的性能和新增功能。
- 未来发展趋势
随着技术的不断进步和应用的深入拓展,CAAC小型六旋翼训练无人机将迎来更加广阔的发展前景。未来发展趋势包括:
智能化:集成更多AI技术,实现自主避障、路径规划、目标跟踪等更高级别的自主飞行功能。
集成化:将更多传感器和任务设备集成到无人机平台上,提升综合应用能力。
标准化:制定更加完善的无人机技术标准和法规体系,促进无人机行业的规范化发展。
环保节能:采用更高效的能源系统和材料技术,降低能耗和环境污染。
广泛普及:随着技术的成熟和成本的降低,无人机将更加普及地应用于各个领域,成为现代社会的重要工具之一。