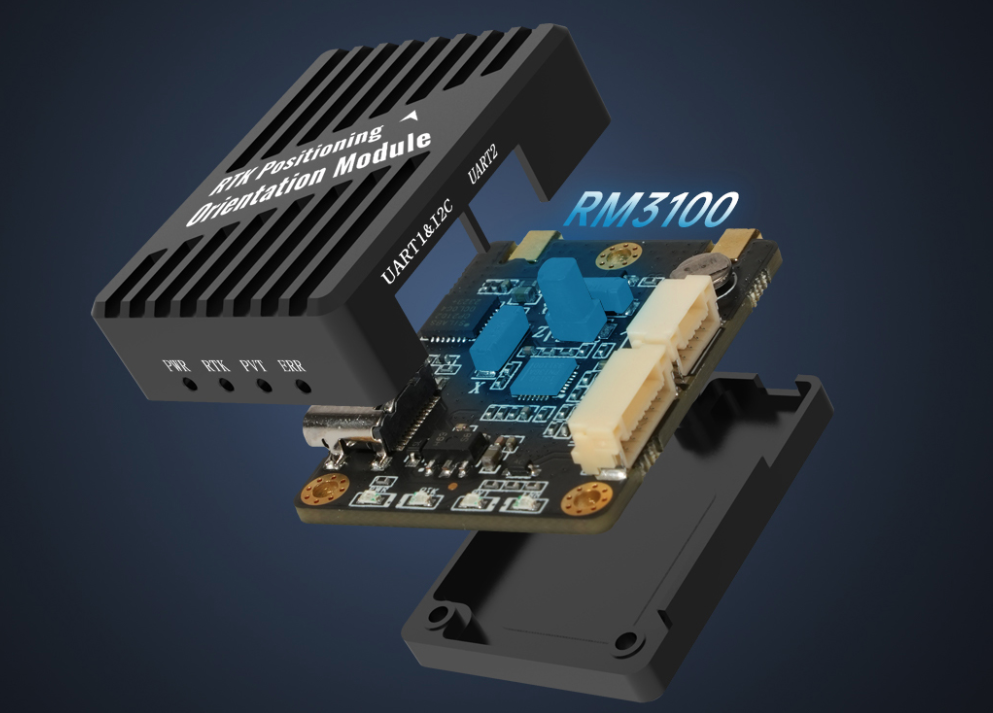
无人机RTK(Real-Time Kinematic,实时动态差分技术)定位定向技术,是无人机领域的一项高精度导航与定位技术。它结合了全球导航卫星系统(如GPS、GLONASS、Galileo、BDS等)与实时差分技术,通过地面基准站与无人机上流动站之间的数据实时传输与处理,实现厘米级甚至毫米级的定位精度。这一技术极大地提升了无人机在复杂环境中的作业能力,广泛应用于测绘、农业、环境监测、电力巡检、应急救援等多个领域。
工作原理
RTK定位定向技术的工作原理基于载波相位差分原理。首先,地面基准站接收来自多颗卫星的信号,并计算其精确位置及载波相位观测值。随后,基准站将这些数据通过无线电或移动通信网络实时发送给无人机上的流动站。流动站同时接收来自卫星的信号,并结合基准站发送的差分数据,进行载波相位差分计算,消除大部分公共误差(如卫星轨道误差、电离层延迟、对流层延迟等),从而得到高精度的位置信息。此外,结合无人机内置的陀螺仪、加速度计等惯性导航元件,可进一步实现姿态(定向)的高精度测量。
核心技术
-
载波相位差分技术:核心在于通过差分处理消除误差,提高定位精度。
-
多频多系统融合:支持多频点、多卫星系统信号接收,增强信号稳定性和可靠性。
-
快速整周模糊度解算:采用高效算法快速解算载波相位整周模糊度,缩短初始化时间。
-
惯性导航辅助:结合惯性导航系统,提高动态环境下的定位稳定性和连续性。
系统组成
无人机RTK定位系统主要由以下几部分组成:
-
地面基准站:负责接收卫星信号,计算差分数据,并通过无线方式发送给无人机。
-
无人机流动站:安装在无人机上,接收卫星信号和基准站差分数据,进行高精度定位计算。
-
数据传输链路:确保基准站与无人机之间实时、稳定的数据传输。
-
数据处理软件:用于数据处理、误差校正和结果展示。
-
惯性导航系统(可选):提供无人机姿态信息,辅助提高定位精度。
技术优势
-
高精度:能够实现厘米级甚至毫米级定位精度,满足高精度作业需求。
-
实时性:数据实时传输与处理,确保无人机作业过程中的即时反馈与调整。
-
抗干扰能力强:多频多系统融合技术增强了信号接收的稳定性与可靠性。
-
作业范围广:不受地形、天气等条件限制,适用于多种复杂环境。
适用场景
-
测绘与地理信息采集:高精度地图制作、地形测绘、三维建模等。
-
农业植保:精准施药、作物监测、农田规划等。
-
环境监测:空气质量监测、水质监测、森林火灾预警等。
-
电力巡检:输电线路巡检、变电站设备检查等。
-
应急救援:灾害现场勘查、搜救行动支持等。
发展趋势
-
集成化与智能化:随着技术的不断进步,无人机RTK系统将更加集成化,同时融入更多智能算法,实现自主作业与决策。
-
多源数据融合:结合激光雷达、相机等多种传感器数据,提升无人机作业的综合能力。
-
低成本化:随着硬件成本的降低和技术的普及,无人机RTK系统的应用门槛将进一步降低。
-
标准化与规范化:随着行业的快速发展,相关标准和规范将不断完善,促进技术的健康有序发展。
综上所述,无人机RTK定位定向技术以其高精度、实时性、抗干扰能力强等优势,在多个领域展现出巨大的应用潜力和价值,未来将继续向集成化、智能化、低成本化等方向发展。