1、基本介绍
该产品是一款面向于人工智能、机器人工程等专业的实验平台,能够学习基于人工智能技术的智能机器臂相关知识。主要由工业六轴机械臂、机械臂控制器、边缘计算主机、安全防护工作台四部分构成。该产品可完成的课程:机器视觉、机器人操作系统ROS等,同时也能够完成智能机械臂相关综合实训等课设内容。

2、平台特性
轻量化 **:**轻量化机械结构设计,采用金属机身,模块化组装工艺,伺服电机搭配减速机;
高性能 **:**控制器使用性能强劲的Xilinx 芯片,ARM+FPGA异构SoC让二次开发灵活高效,同时采用多轴联动插补控制算法,提高系统的精度和稳定性;
扩展性强 **:**提供ROS/Python/C++ SDK,支持RS-232/Ethernet/Digital IO通信扩展,包含机器视觉、语音识别等多款AI案例,充分发挥机械臂的最大潜力;
易用性 **:**支持ROS、ROS-I框架,丰富的开源功能包,帮助用户快速上手机器人的使用和开发;
持续更新 **:**支持固件OTA远程更新,软件持续迭代优化,配套应用和教程不断升级。
3、实验截图
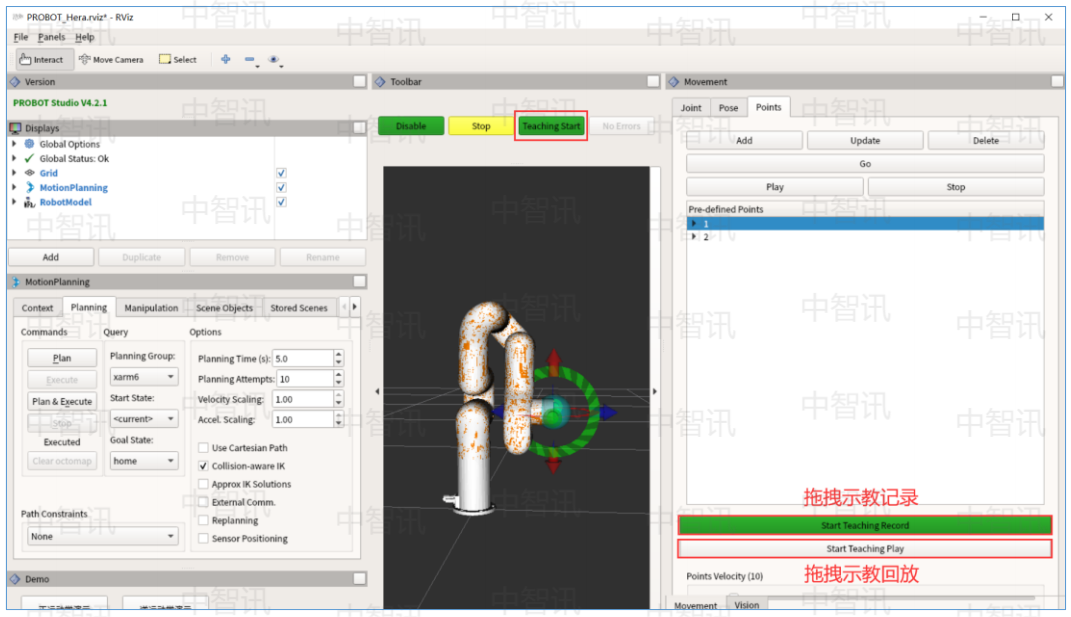
rviz 拖动示教
目标识别
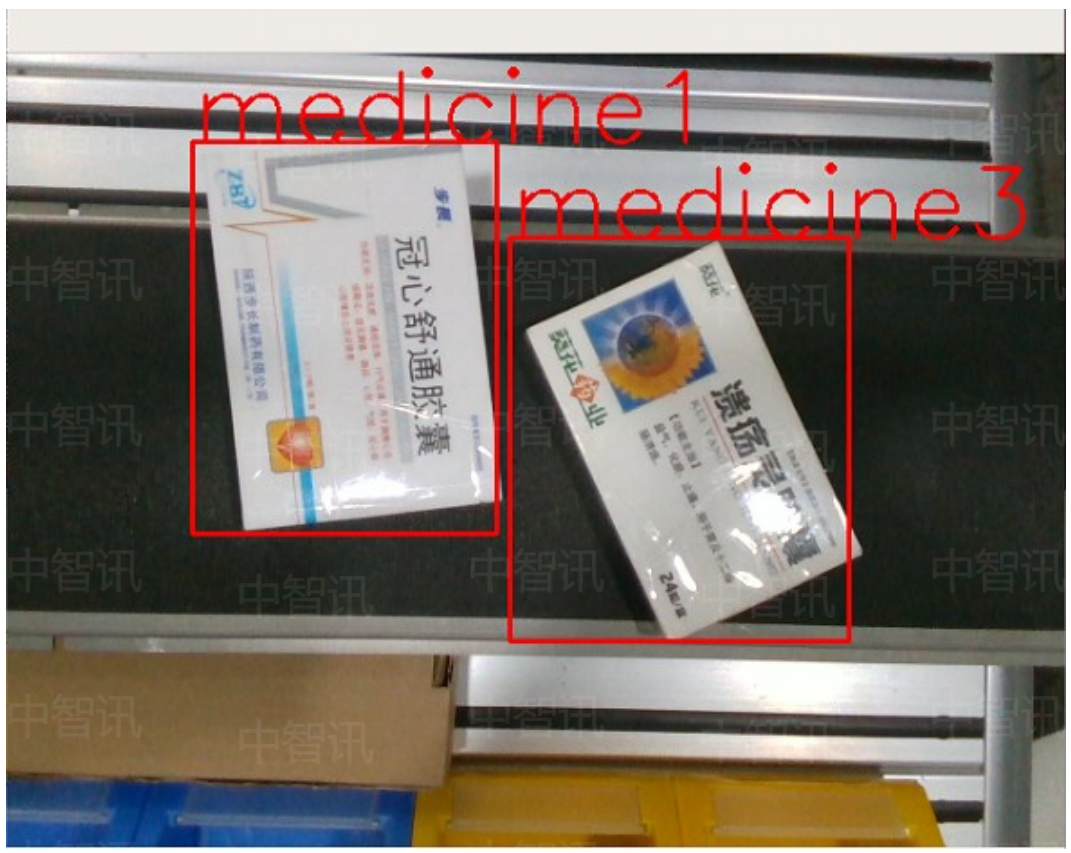
药品分拣

颜色识别

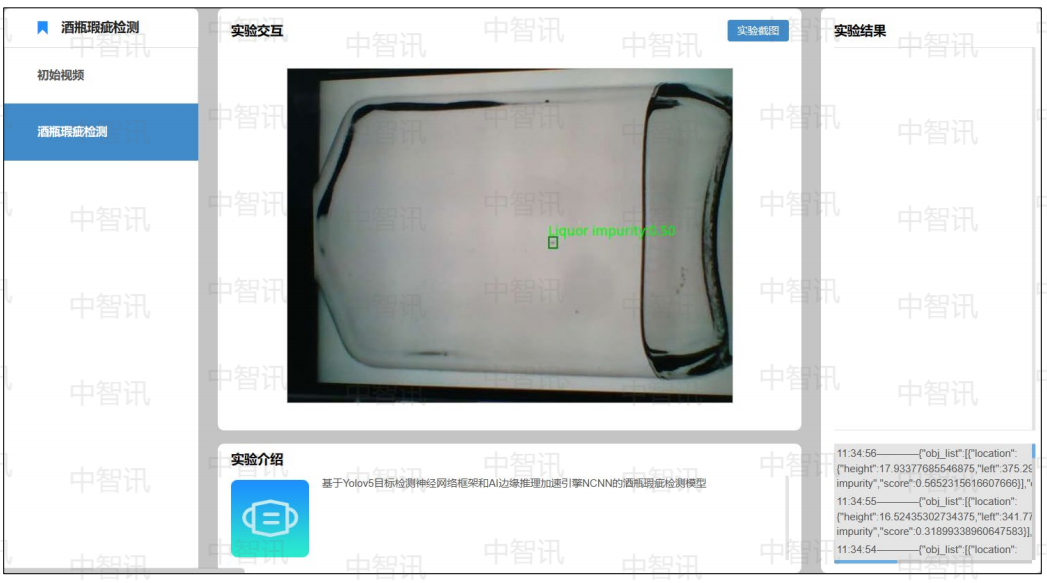
酒瓶瑕疵检测