
简介
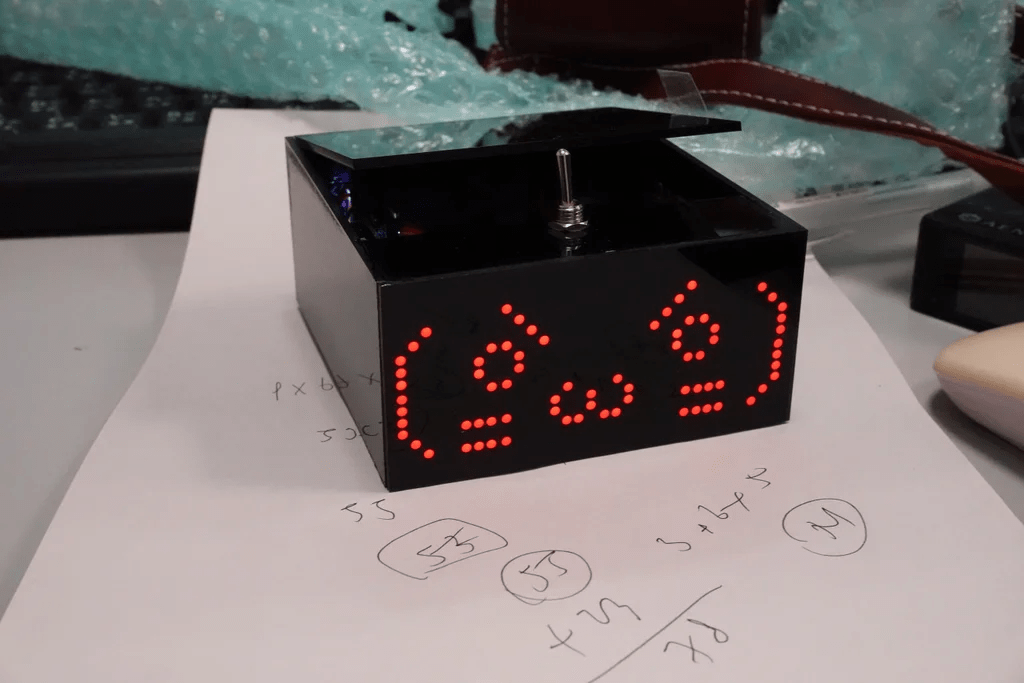
作者在完成硕士论文答辩后,利用空闲时间制作了一个他一直想做的机器人------可爱无用机器人。
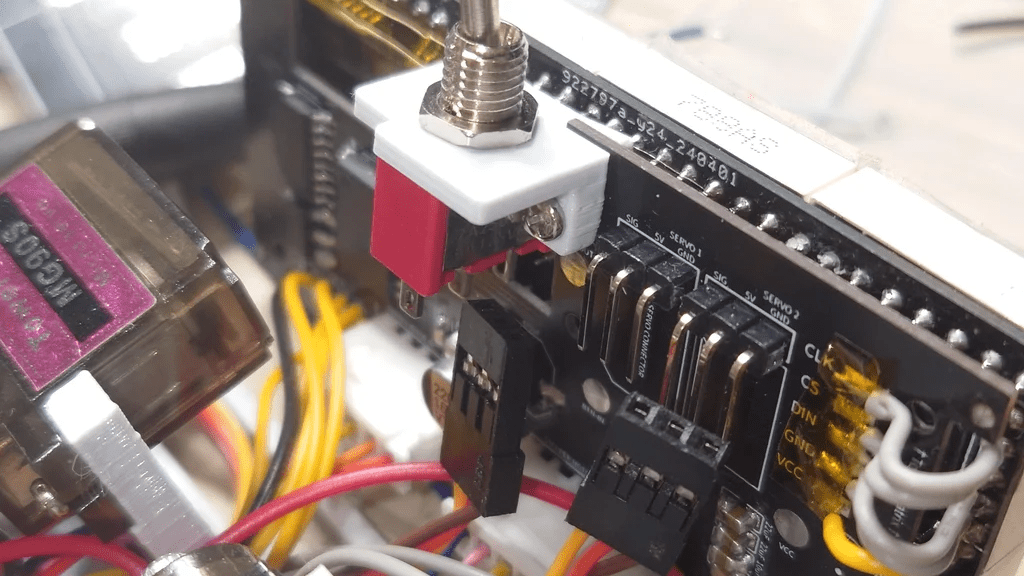
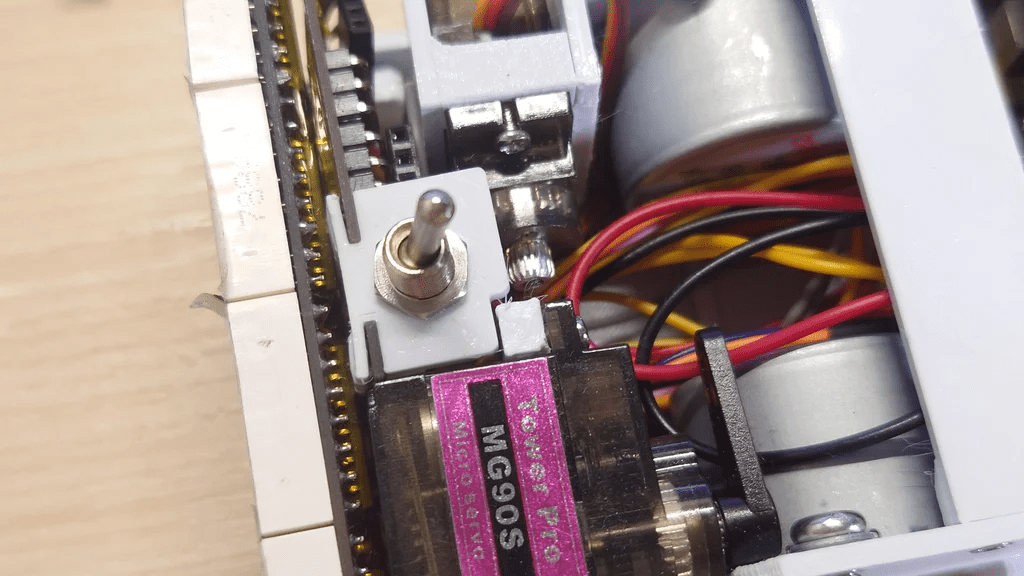
无用机器人原理是一个连接到开关的电机,通过逻辑门控制。当开关被推到"开"时,机器人启动电机,并利用巧妙设计的杠杆将开关推回"关"位置。这种玩具很常见,许多人已经制作并上传到YouTube上。
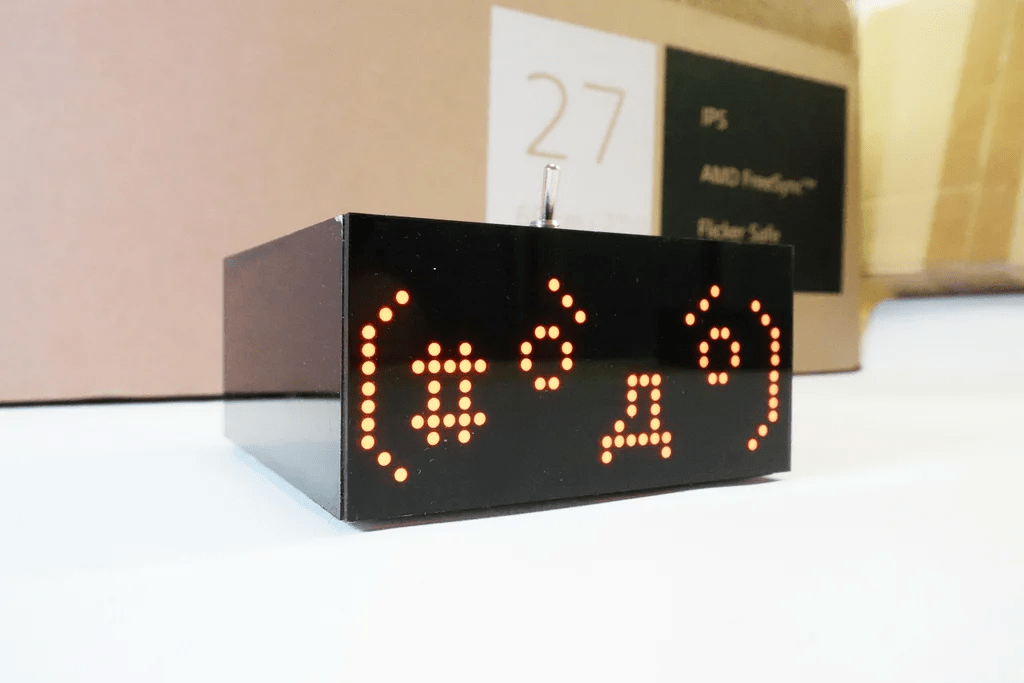
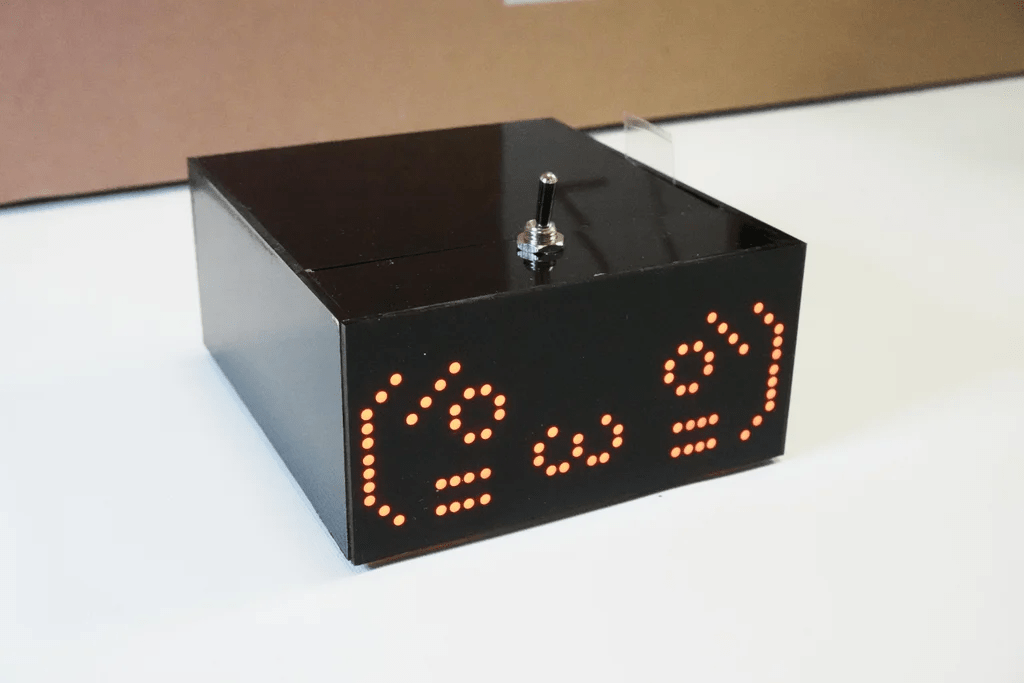
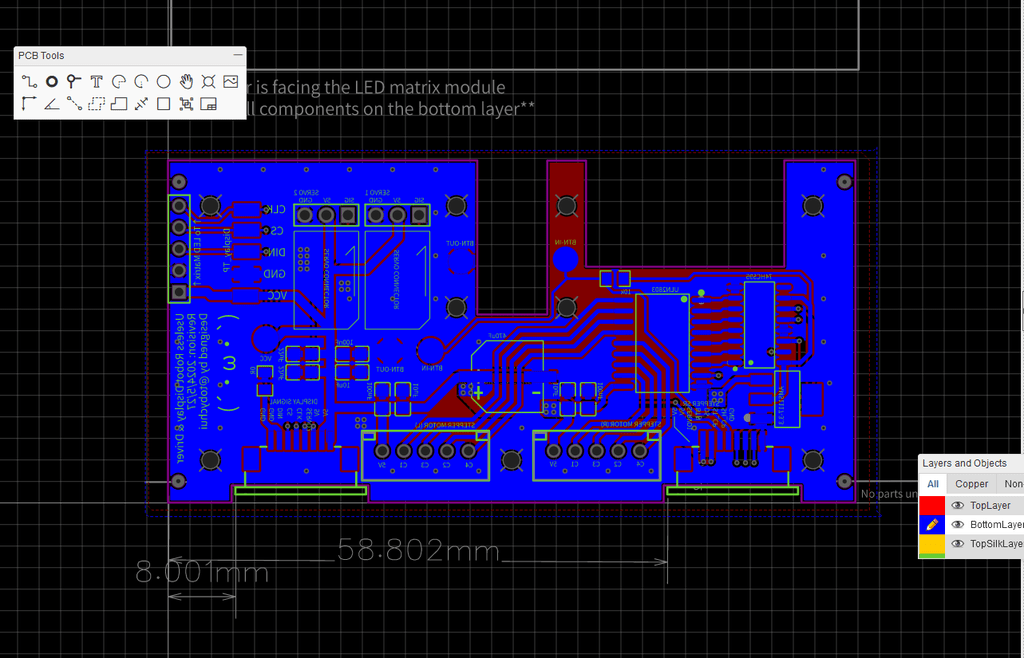
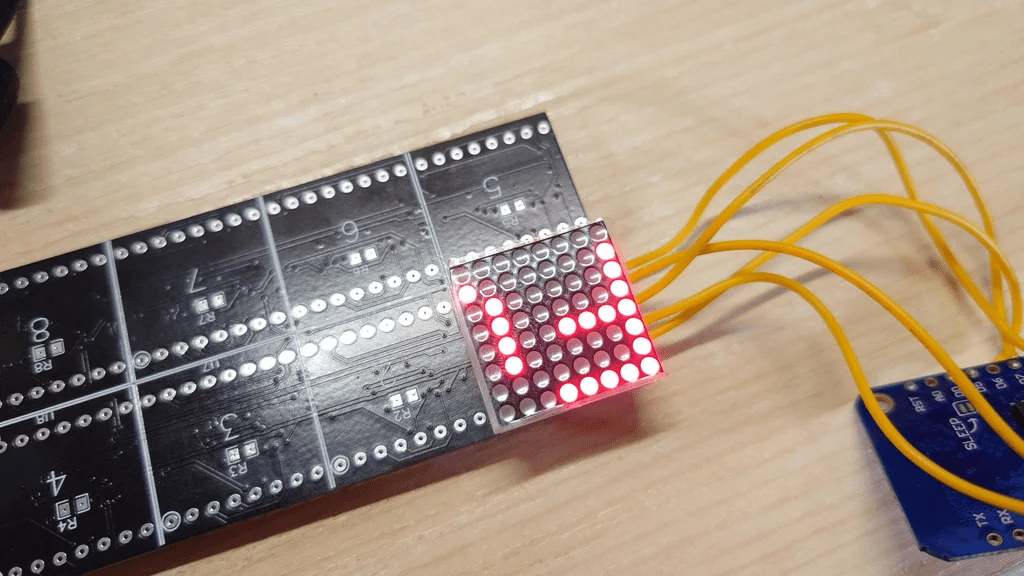
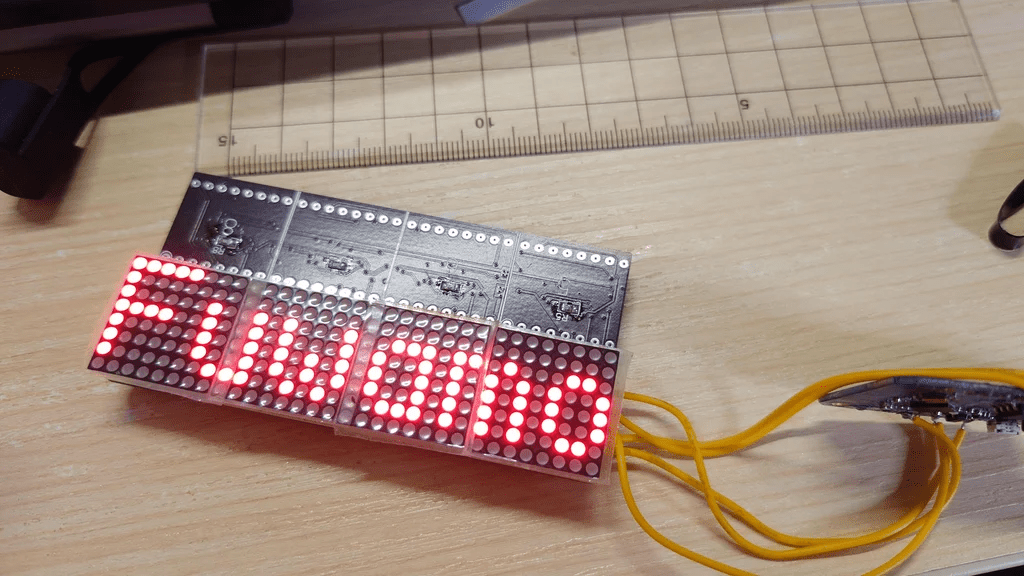
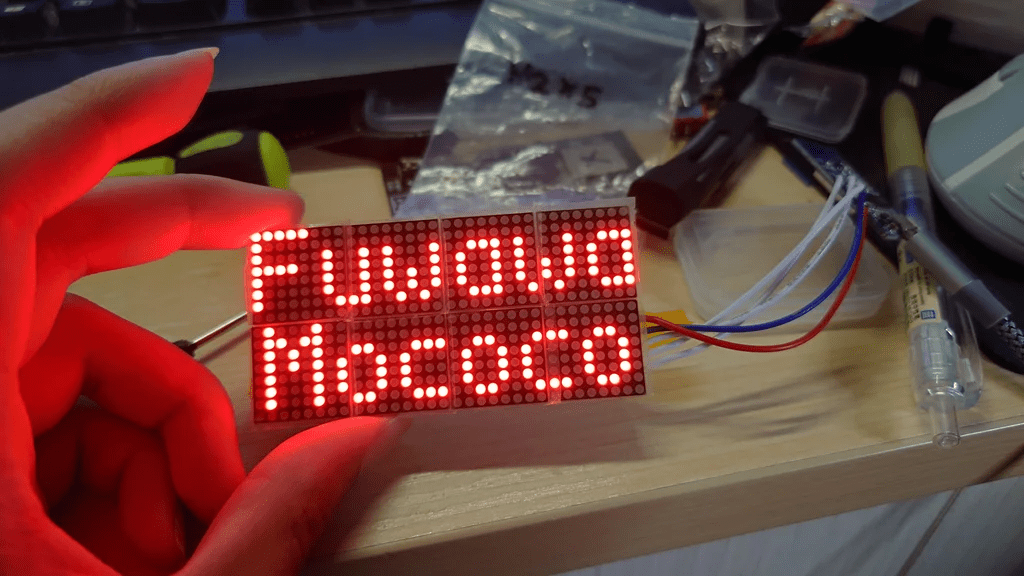
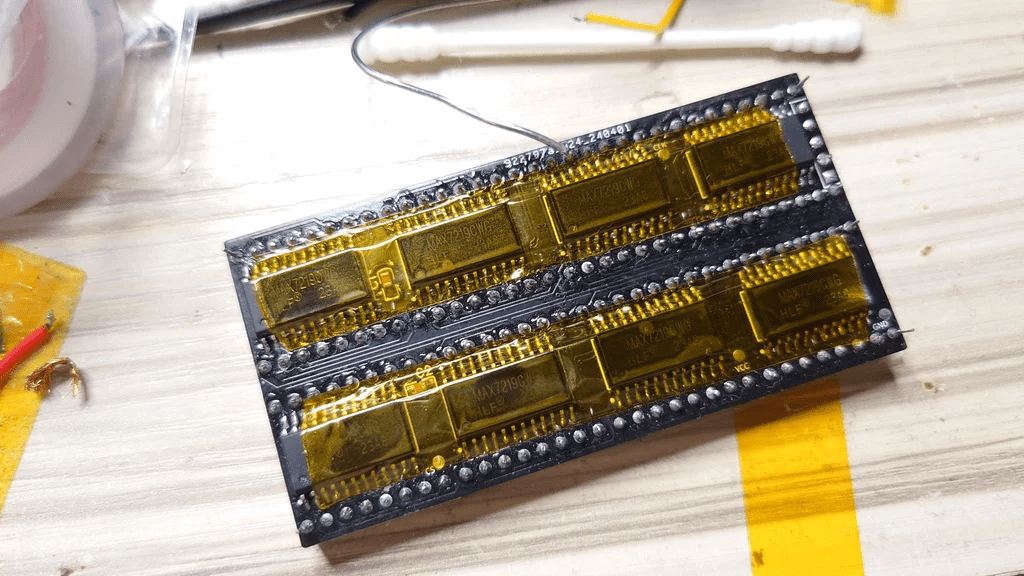
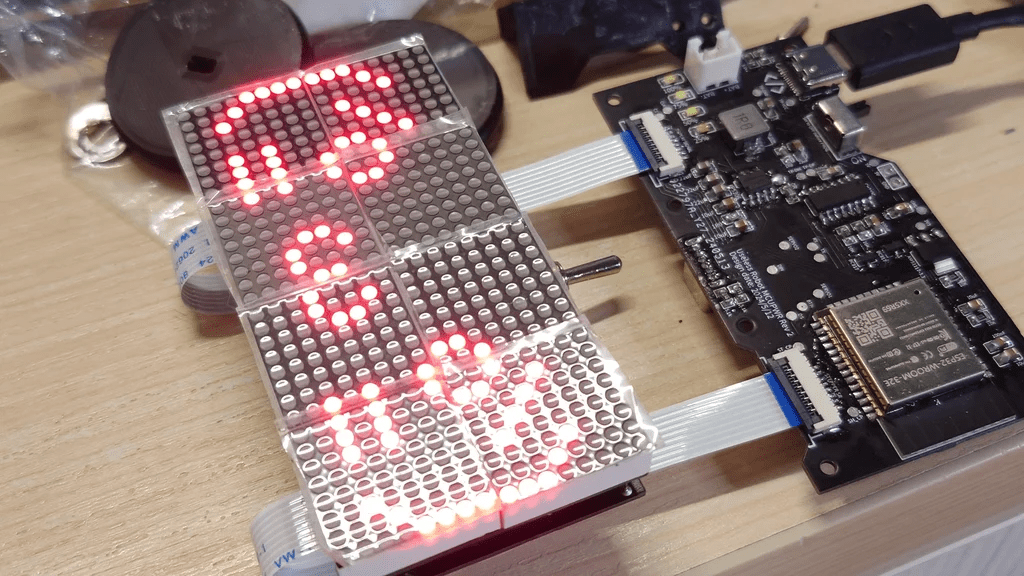
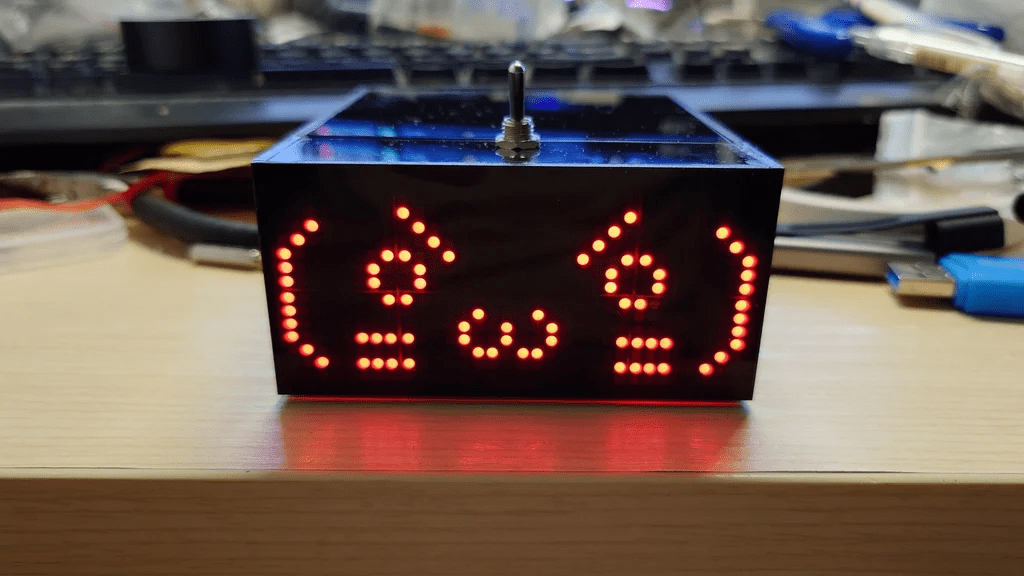
作者每年都会挑战自己制作一个技术产品,今年他决定制作这个复杂的项目------可爱无用机器人。这个机器人参考了日本创客Kairoshi的设计,拥有基于LED矩阵模块的表情显示器和内部步进电机,能够对用户输入做出可爱的反应。
材料和步骤
-
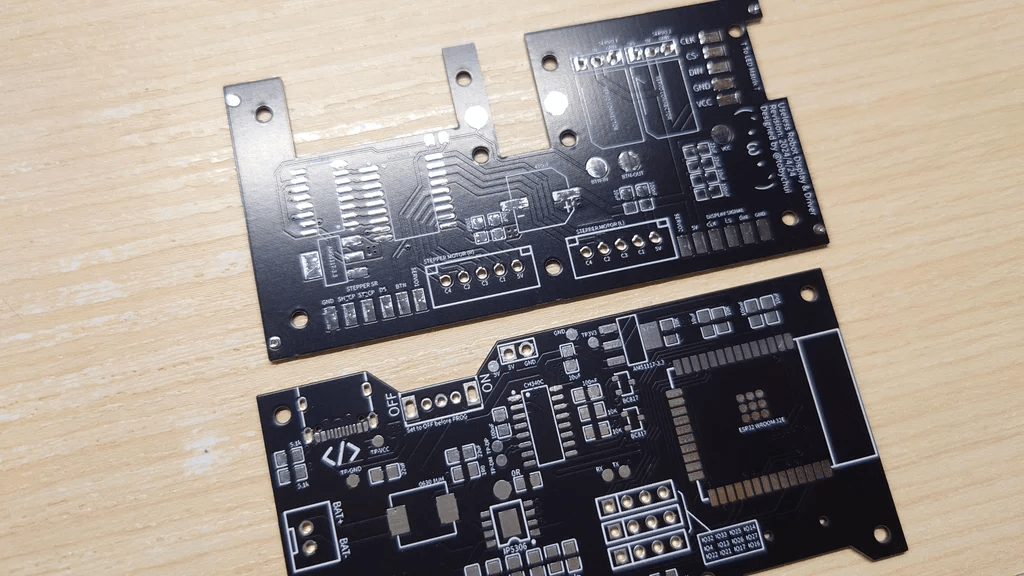
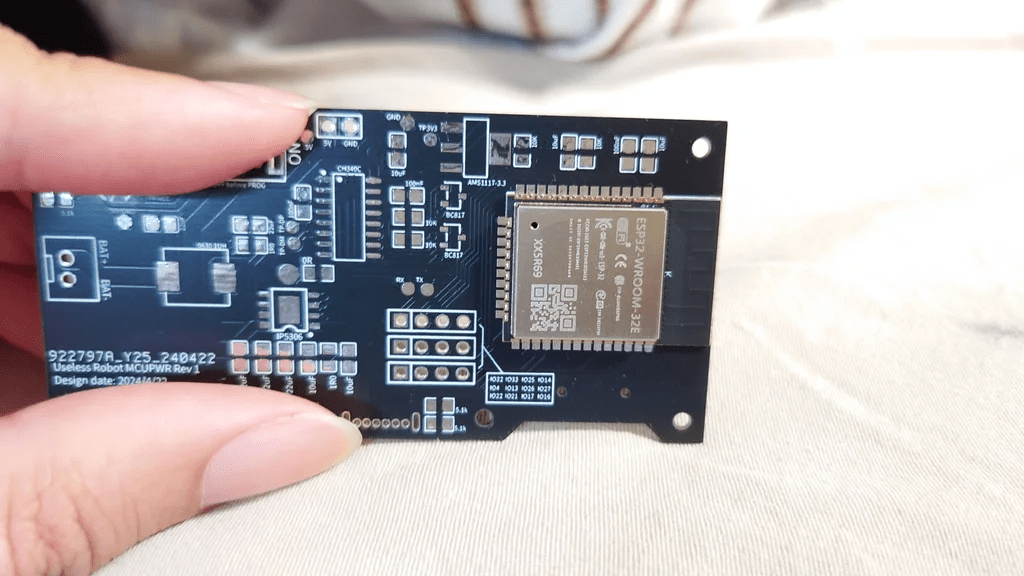
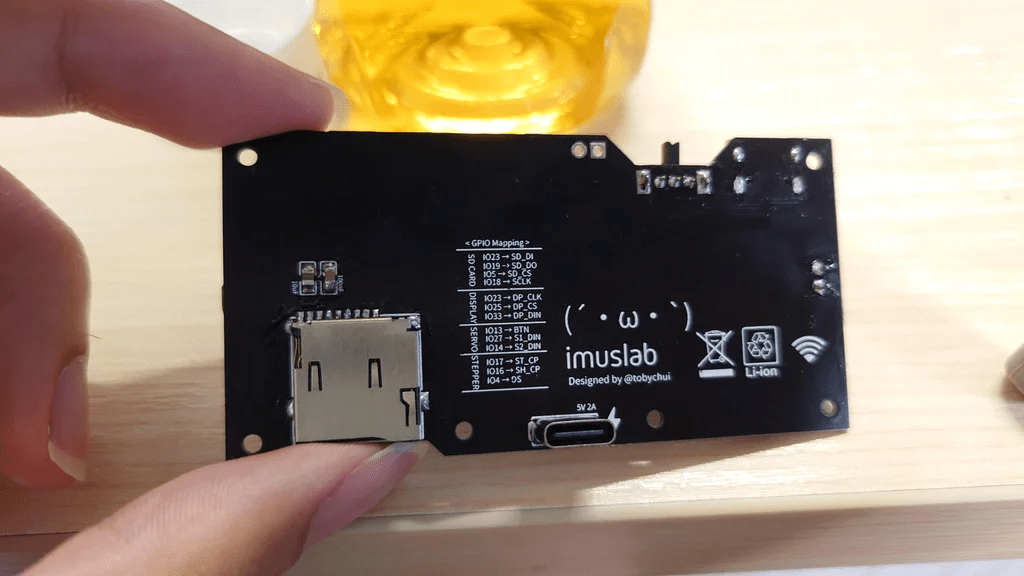
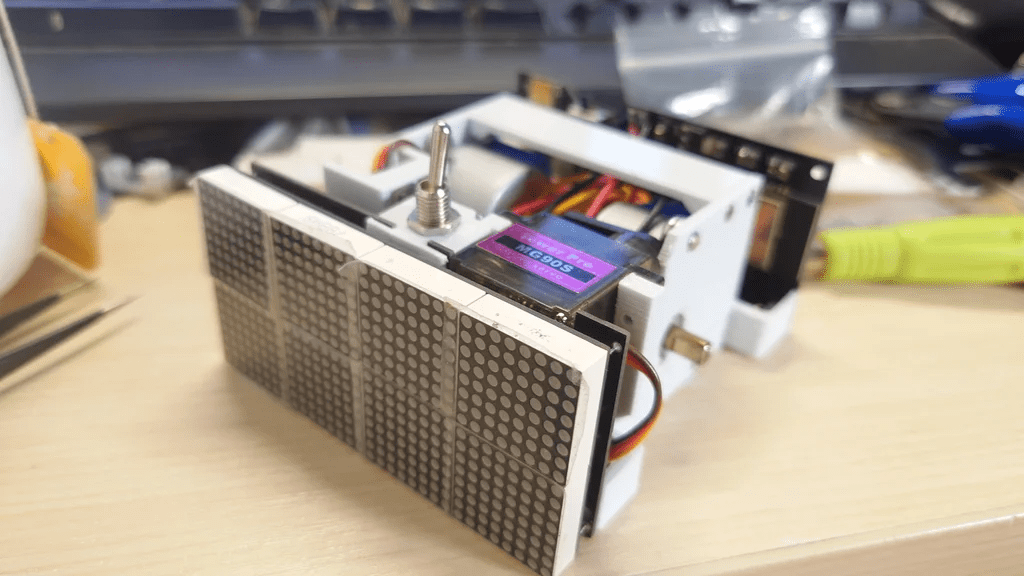
需要的主要部件包括3D打印外壳、激光切割的黑色丙烯酸板、步进电机、伺服电机、PCB板、LED矩阵模块、ESP32E等。
-
制作过程包括打印PCB
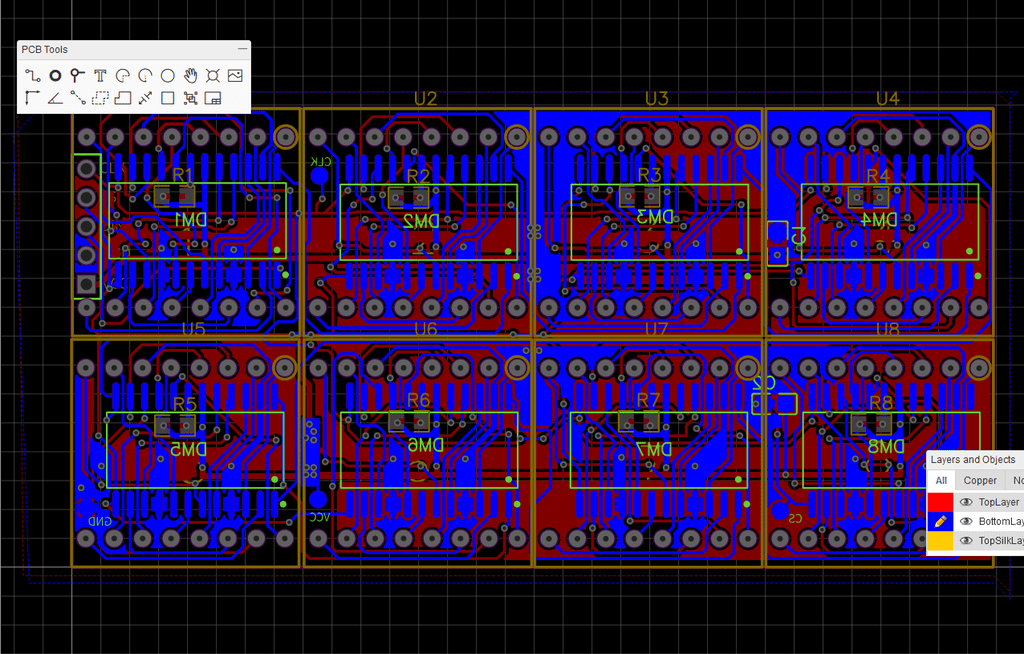
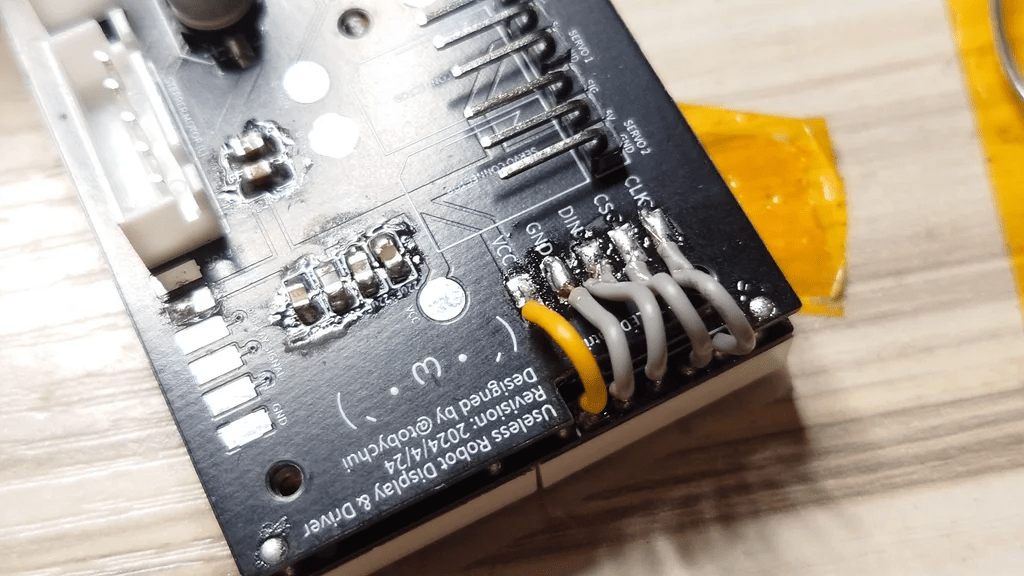
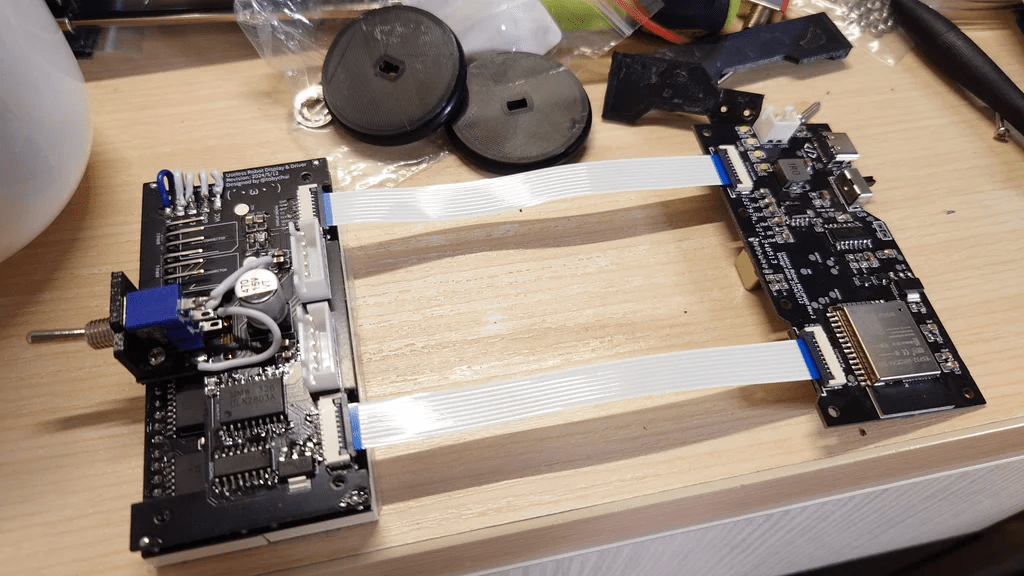
- 焊接和组装显示模块
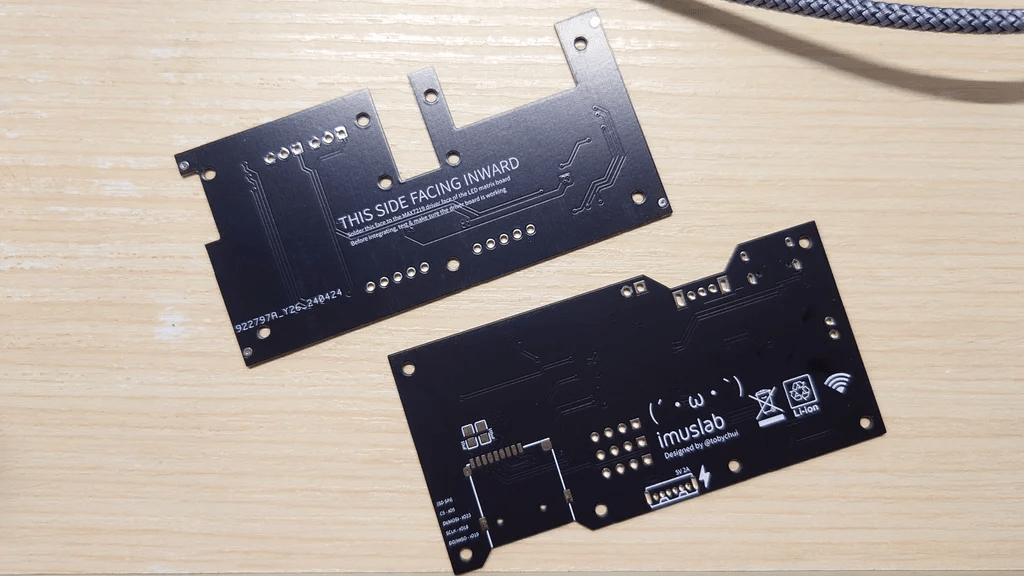
- 安装开关、焊接驱动板

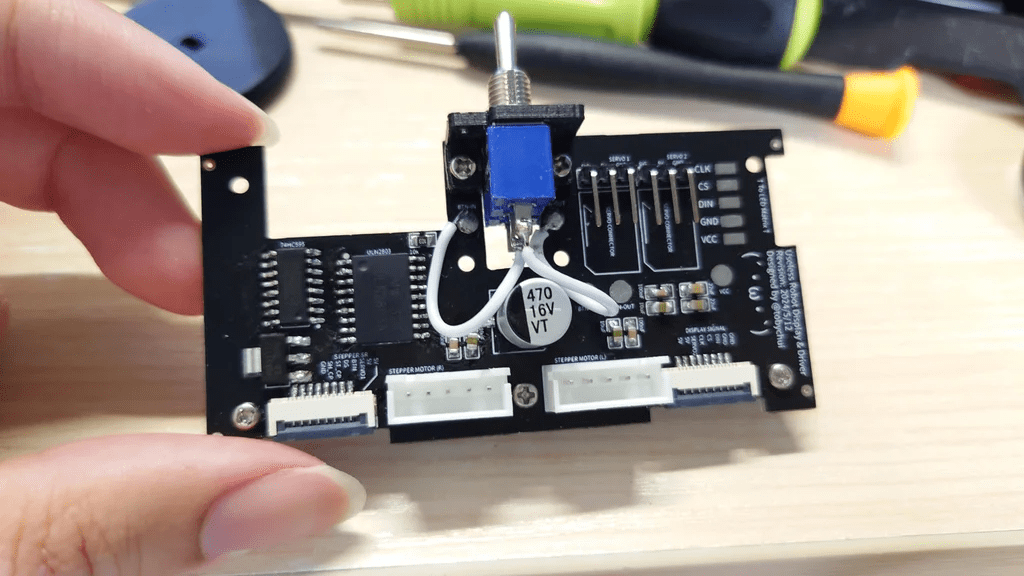
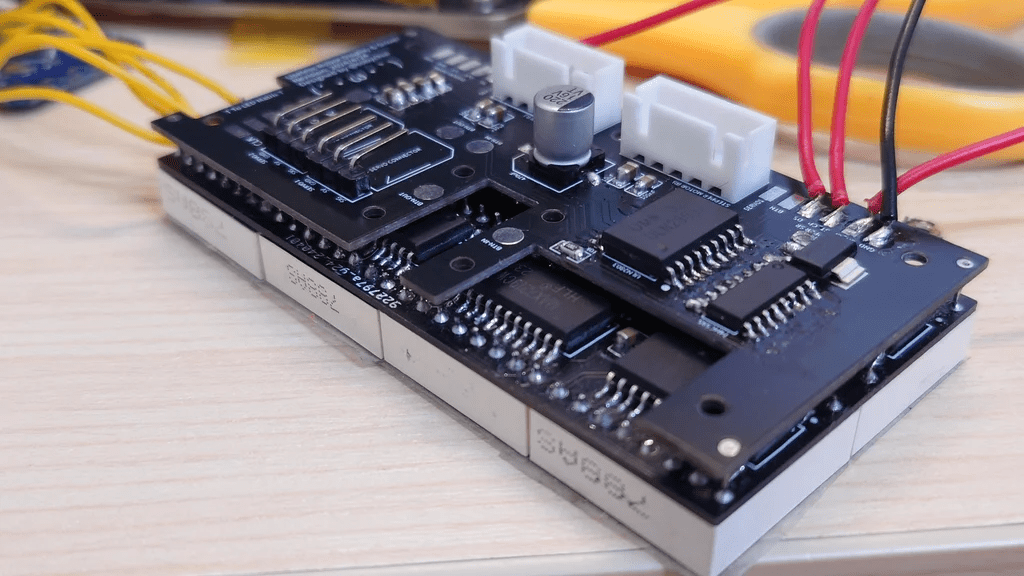
- 组装MCU板、功能测试
- 3D打印机器人机身、激光切割外壳、固件烧录等。
注意事项
制作这个机器人的材料成本比较高,接近一台全新笔记本电脑的价格。此外,如果没有焊接经验,整体成本可能更高,因为还需要涉及到PCB组装。
完成
完成后,机器人可以通过WiFi控制,或在自动模式下运行,表现出不同的情感和反应。希望你喜欢这个项目。
更多细节可以查看作者的GitHub仓库:https://github.com/tobychui/Kawaii-Useless-Robot
原文首发于DF创客社区