这篇博文是自己看文章顺手做的笔记 只是简单翻译和整理 仅做个人参考学习和分享
如果作者看到觉得内容不妥请联系我 我会及时处理
本人非文章作者,文献的引用格式如下,原文更有价值
摘要------
收集和讨论小型多旋翼无人机受地面效应的影响,尤其是从建模和控制的角度。
For a rotorcraft, an accident is likely to happen when the vehicle leaves or enters the ground effect region, which may cause crashes and property damages.
讨论关于地效的建模 控制和应用,以及其他一些类似的效应比如顶吸和墙吸
总结:
实验现象:
地面效应距离z<2R(有些多旋翼在z<5R都有观测到地效的影响),提供额外升力,或者说 保持总升力不变时降低了旋翼功率。利用近地面飞行可以节能约10%
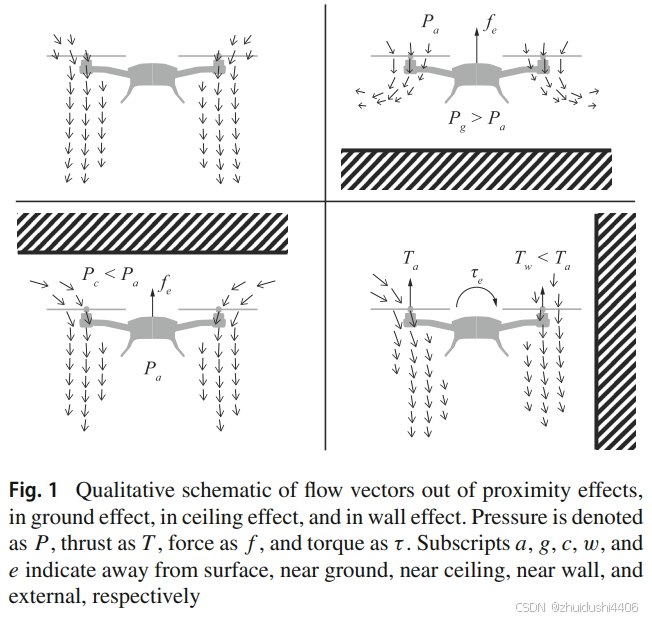
顶吸效应距离z<2R
侧吸没有给生效的距离,但是,研究发现,对于靠近墙壁的叶片,升力会随着叶片方位角的变化而周期性波动。这些波动的升力在转子盘上产生力矩,力矩随转子-壁间距和姿态而变化。
方法上的讨论:
目前还是需要更好的感知和算法 - > 传感器数据融合和on-board实时数据处理
主要建模方法:实验数据建模 ,参数化建模,动力学建模
参数化建模可以更好的拓展在不同机型,因为可以定义旋翼直径,旋翼间隔,旋翼数等。
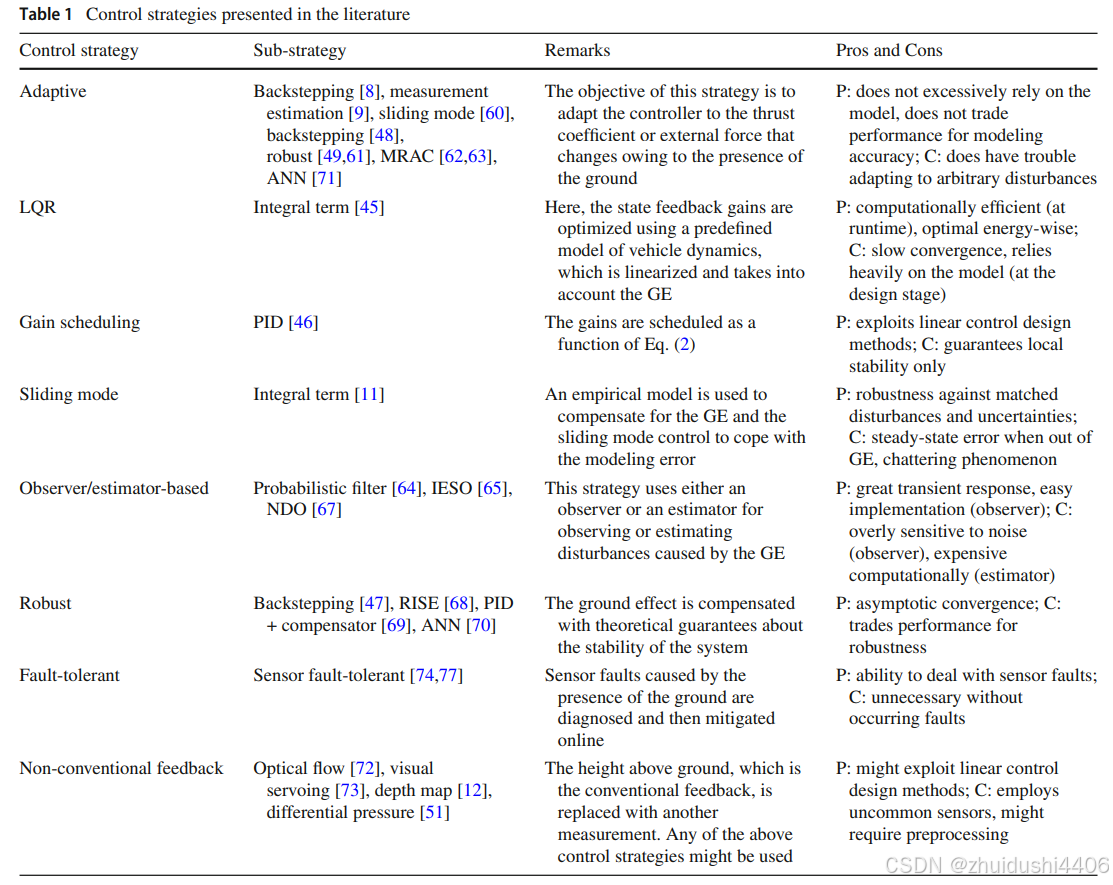
主要控制方法归为四类: 自适应,基于观测器,鲁棒,容错。控制器需要处理的包括 传感器问题,气动交互时的新模型。
应用方面,临近气动效应主要三个应用:提升控制效果,被动临近估计,节能导航。
应用方面的一个挑战在于:未知局限环境下的自动导航
未完成的工作:
包括对新模型的广泛验证、新模型在控制架构中的应用,以及在未知封闭环境中的自主导航,我们认为基于计算机视觉和机器人技术的人工智能技术可以利用新解决方案的出现
1 Introduction
. At the control level, a model of the GE can be incorporated into the control loop, allowing to track trajectories more accurately 11,12.
回顾了从1930至今关于地效研究的趋势,以及本文是第一次综述小型旋翼机的地效。
2 Background
悬停下的地效:
In all cases, it is apparent that the GE becomes negligible for rotors hovering greater than two rotor radii (one diameter) above the ground.
前飞时的地效:
observed that the ground reduces the power required, but the effect diminishes with height more rapidly in forward flight. On the other hand, for small heights and speed near hover, the net power required can actually increase because of the formation and influence of flow recirculation at the leading edge of the rotor 42.
环境影响:
Bludau等人44承认任意环境的影响,提出了一种实时模型来预测物体附近的旋翼机运动。
2.1 Control
包含模型的方法中,a particular model of the rotor thrust is used, in which the thrust depends on the reduction of the induced velocity due to the GE.
height estimation and control is possible with only flow sensing and modeling.
2.2 Flow Studies
Research has been carried out about proximity flow effects on small rotors.
This claim motivated a work that used CFD to investigate the fluid interactions between a hovering small rotor and planar surfaces 54. The computational method was validated by comparison against experimental results, a two-dimensional free vortex model, and results from existing literature. This study supposed that the variation in thrust generates a vertical force disturbance, Z¯, acting on the helicopter. Then, the relationship between Z¯ and ground proximity was characterized as:

Flight tests showed that the scheme can provide fair in-flight estimates of disturbances that are induced by the ground plane using only an onboard inertial measurement unit (IMU)
2.3 Modeling
The modeling of the GE for small rotors has attracted the attention of the UAV community.
3 Multirotor
Even though akin, helicopters and multirotors differ greatly on their mechanical structure and operation.
3.1 Control
用的最多的方法是自适应控制
Guenard et al. 9 proposed an adaptive altitude controller that estimates online the global thrust coefficient of a quadcopter (assuming that the thrust coefficient is the same for all the rotors).
It was noted that using the adaptive controller and the estimator worked well in experiments with a quadrotor prototype (only results for heights above 0.5 m were reported, situation in which the GE might not be significant given the size of the prototype),'
用观测器结合高度传感器 修改旋翼力效系数
Lee et al. 60 compared in simulations two nonlinear control methods for quadcopters: feedback linearization and adaptive sliding mode.
They considered an unknown acceleration term, representing the GE, while designing of the adaptive controller.
模型中加了一个函数来表示地效引起的加速度
发现传统反馈线性化应对非确定性和传感器噪声时不够鲁棒,自适应滑膜控制器相对较好。
同一作者,后来滑膜自适应的部分改成了神经网络,调整其权重来估计地效在z轴加速度,roll,pitch引起的干扰。在一个0.8kg无人机测试。结果说明效果提升了。
Hu et al. 61 proposed a control structure to achieve the landing of a quadrotor onto a vertically oscillating platform.
降落在高度垂直摆动的平台上,控制器包括动作估计,轨迹生成,自适应鲁棒跟踪。
The controller was executed in an offboard computer using measurements of vertical position from a MoCap system, and vertical acceleration from an IMU.
A pair of authors have explored model reference adaptive control (MRAC) for quadcopters operating close to the ground.
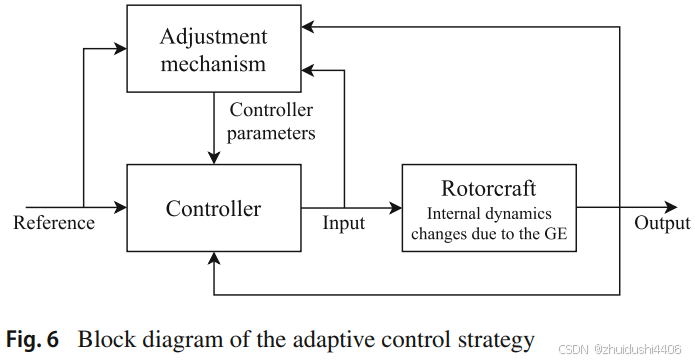
When the observer or estimator is used to estimate internal or external disturbances online in the control loop, the control strategy is often referred to as an active disturbance rejection control
Besides the increment in thrust efficiency, the GE causes variations in the pressure altitude measured by barometers 75 and distance measurements of ultrasonic sensors 9.
3.2 Modeling
In the classical rotorcraft literature, the GE is studied in static conditions, in essence, for a fixed rotor. Even when a non-fixed rotorcraft is analyzed, the data are collected once the vehicle is at a stable hovering state.
Evidence has been reported about how the GE varies for different types of surfaces.
3.3 Applications
The authors in 80 took advantage of the GE to perform a blind terrain mapping.
The idea is to fly a quadrotor at a constant height and slow forward velocity over the terrain to be mapped while recording the average rotors speed and x-y position.
Using an equivalent approach, a sensorless surface detection and estimation procedure is proposed in 10.
Using an equivalent approach, a sensorless surface detection and estimation procedure is proposed in 10. Here, the estimated height from the ground is computed as a function of the throttle command of a quadcopter (previously obtained from experimental data). This estimation is used first to detect the ground, and later to land the drone. Two experiments were reported in which a quadcopter is able to land autonomously using this strategy. Nevertheless, the estimation is shown to be reliable only when the height from the ground is below 10 cm, which could lead to a crash. In the same work, ground and ceiling surfaces are considered to achieve energy-efficient path planning. From a heuristic energy relation, the authors demonstrated that it is possible to save about 10% when flying in proximity to horizontal surfaces.
利用近地面飞行可以节能10%
4 Other proximity effects
The second most mentioned proximity interaction is the Ceiling Effect (CE) 54,79,82,87, 97, which emerges when a rotorcraft is approaching from below to a horizontal surface.