今天早上,OpenAI实施团队的 @shyamal在Github上开源了Swarm这个OpenAI官方的多智能体框架。不得不说,OpenAI官方下场,获得的社区影响就是不一样,在微信群、朋友圈里已经出现大量的解析文章。
这个多智能体框架确实已经把多智能体的关键,说的很透彻了,Swarm 里面定义了两个核心**「Agents」** 和**「Handoffs」,多智能体的核心是在这个Handoffs上面。**简单看了下examples 之后我觉得这个多智能体框架并不够好,恰巧的是,我对云原生技术很熟,借用一下云原生的发展历程,给这个Swarn框架做个简要点评:从云原生容器发展的历史来看,相当于docker swarm 和 k8s, 我们需要的智能体框架应该是k8s 这样的一个框架,如果你是一位云原生技术熟悉的同学很容易就知道我在说什么了。
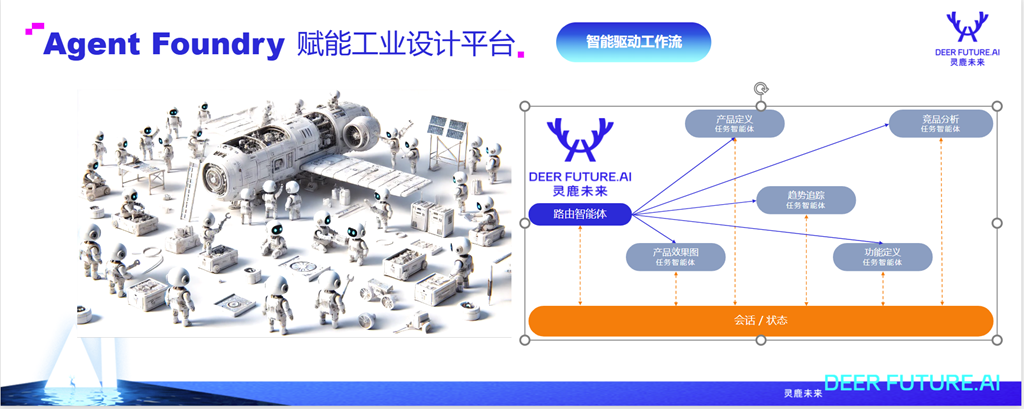
单Agent这块,简单封装提示词和使用函数调用就可以完成业务,OpenAI就一个 /api/chatcompletions 接口就帮我们搞定了,市场上大量的Agent 产品都停留在单Agent 上,但是「Handoffs」这块,Swarm的确做的非常优雅了。个人观点认为他的设计还没有我们的多智能体框架好用,OpenAI的Swarm是docker swarm,我们的多智能体框架就是k8s,我需要的是像k8s编排容器那样编排智能体,我们刚刚在9月26日对外发布了多智能体的工业设计产品,详见:智用研究院AI Agent Foundry赋能的首个多Agent驱动的工业设计平台圆满发布。
多智能体的核心难题其是不同智能体之间的通信问题。怎麼传递信息,传哪些信息,这些都很重要。多个智能体协作,也只需要在必要的时候被调用起来就可以了。看我们智能体协作图:
当我们多智能体应用接收到用户的请求,借用Semantic kernel的设计理念叫实现"目标导向"的AI应用,这意味着它能够帮助确定目标,然后寻找实现这些目标的方法和步骤。在"目标导向"的方法中,首先需要确定目标,然后通过规划器(Planner)将目标分解为一系列需要执行的任务。这些任务可以逐个执行,以实现最终目标。这个过程对于人类来说是很自然的,但对于机器来说则相对复杂。借助LLM AI的力量,我们可以更轻松地实现这一过程。
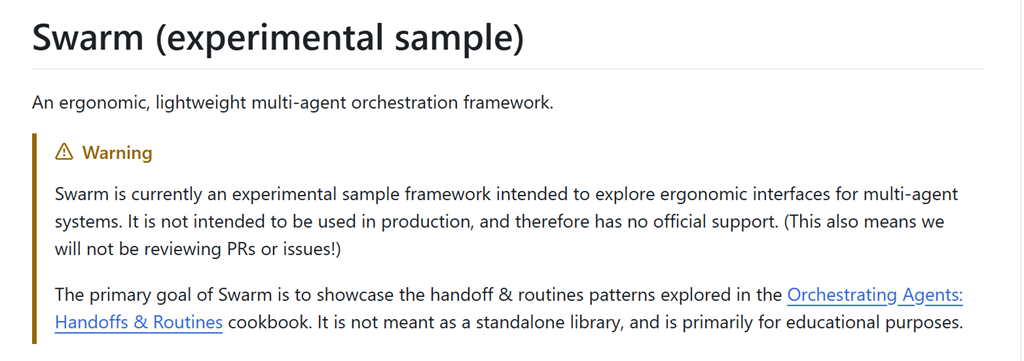
这个接收到用户请求的智能体我们叫做路由智能体,他负责路由到具体执行任务的任务智能体。我们的智能体框架的Planner 也是类似于OpenAI的Swarm的「Handoffs」处理了交接的逻辑,我们的Planner 要比Handoffs处理的更完美。OpenAI的Swarm 目前还处于实验阶段,期望他发展成为k8s 这样的一个多智能体编排框架:
这个框架是python写的,大家觉得用python 写多智能体应用是好选择吗? 我个人认为做应用开发,Python并不是好选择,Python之所以用的多,是因为这一波人工智能的主导者是算法工程师,他们习惯用的编程语言是Python罢了,随着复杂场景的人工智能应用需求的增加,控制权逐步要回归到应用开发者的手中,对于复杂度高、需要长期维护的应用系统还是需要用c# 、java等业务系统开发类的编程语言来主导。