对于ROS新手而言,可能会有疑问:学习机器人操作系统,实体机器人是必须的吗?答案是否定的,机器人一般价格不菲,为了降低机器人学习、调试成本,在ROS中提供了系统的机器人仿真实现,通过仿真,可以实现大部分需求,本章主要就是围绕"仿真"展开的,比如,本章会介绍:
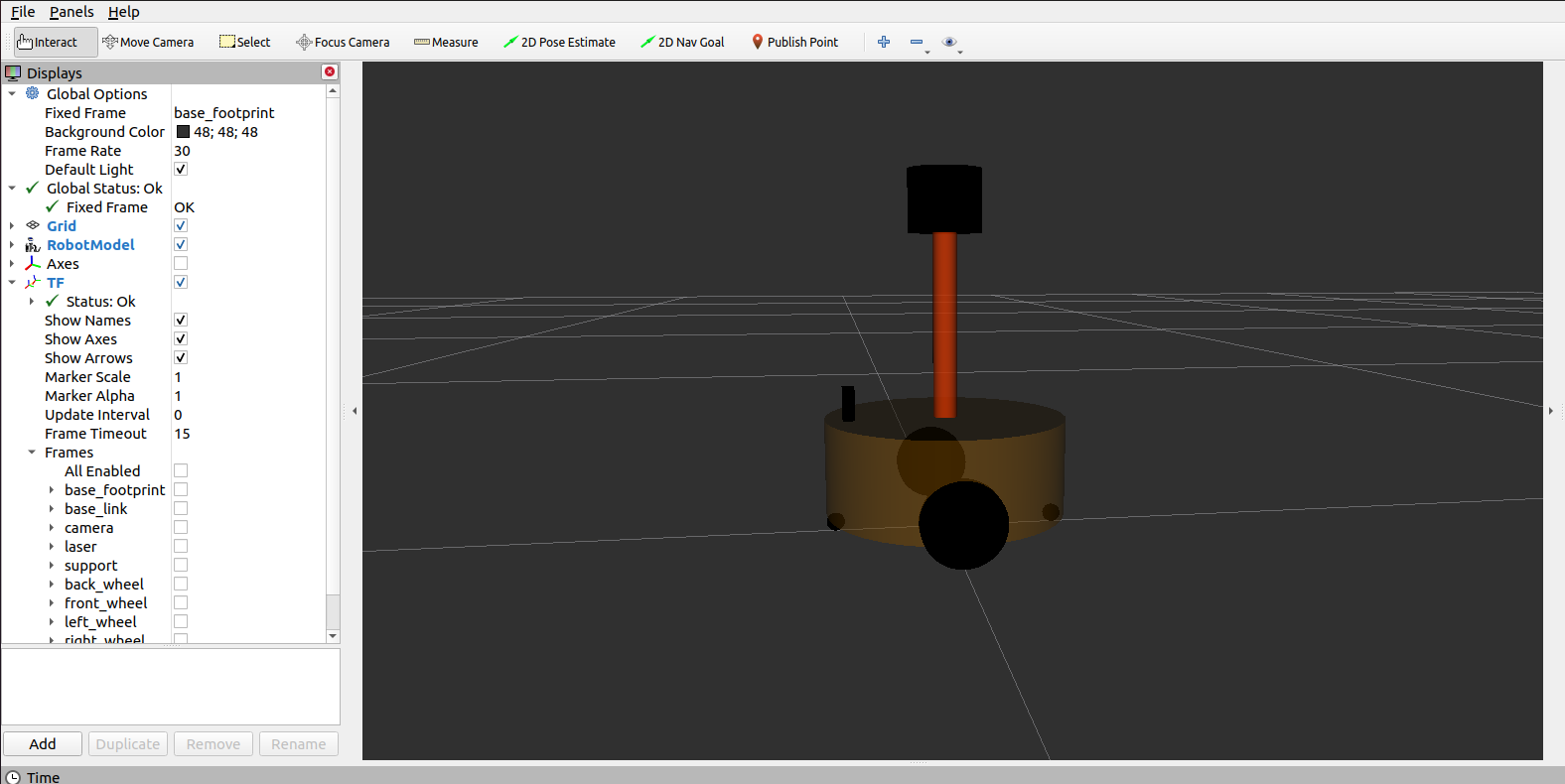
- 如何创建并显示机器人模型; URDF
- 如何搭建仿真环境;Gazebo
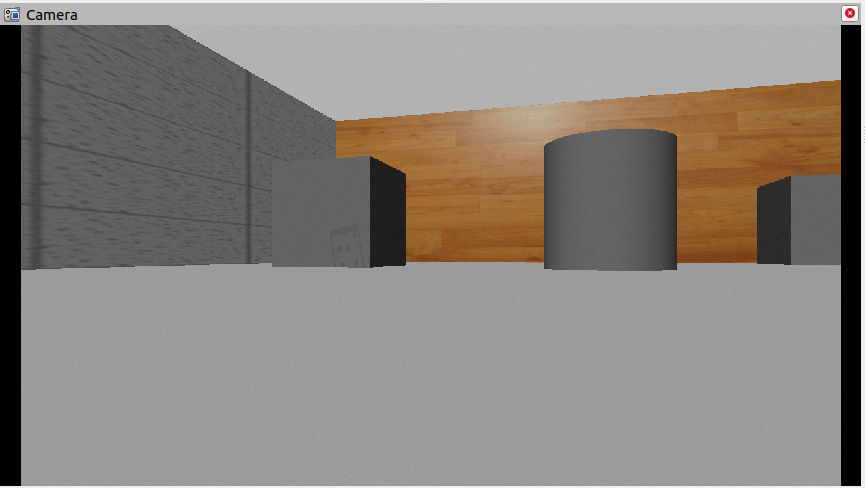
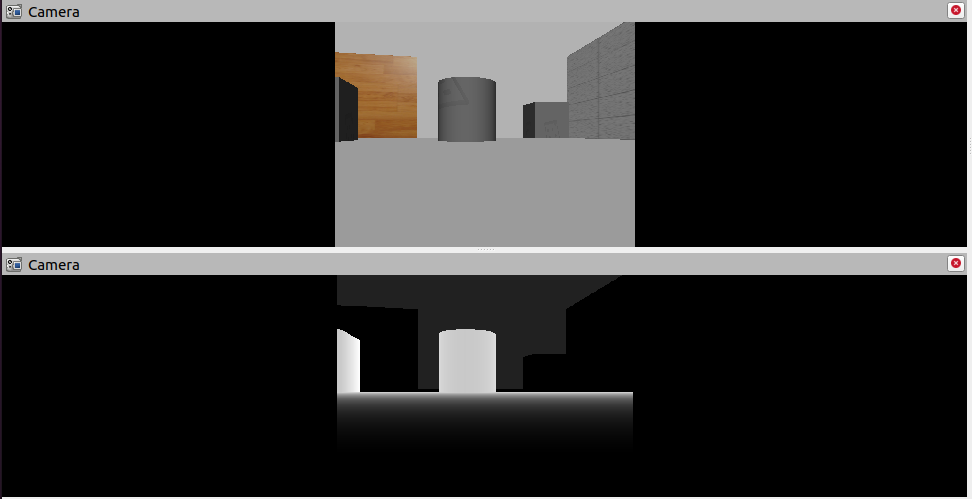
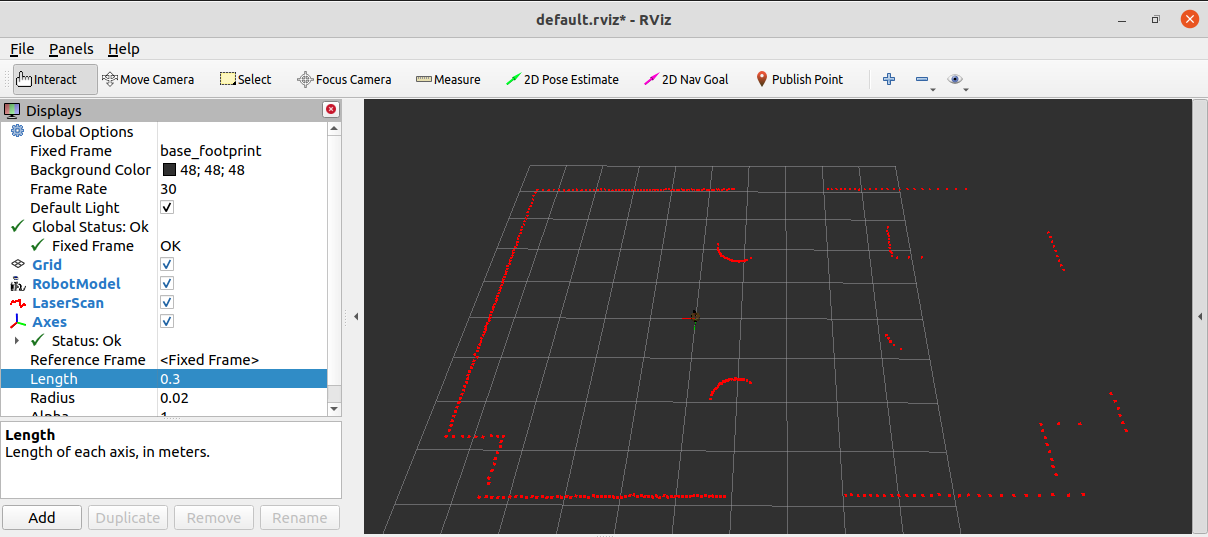
- 如何实现机器人模型与仿真环境的交互。如通过机器人的视角来观察它所看到的世界ruiz
本章预期的学习目标如下:
- 能够独立使用URDF创建机器人模型,并在Rviz和Gazebo中分别显示;
- 能够使用Gazebo搭建仿真环境;
- 能够使用机器人模型中的传感器(雷达、摄像头、编码器...)获取仿真环境数据。
案例演示:
1.创建并显示机器人模型
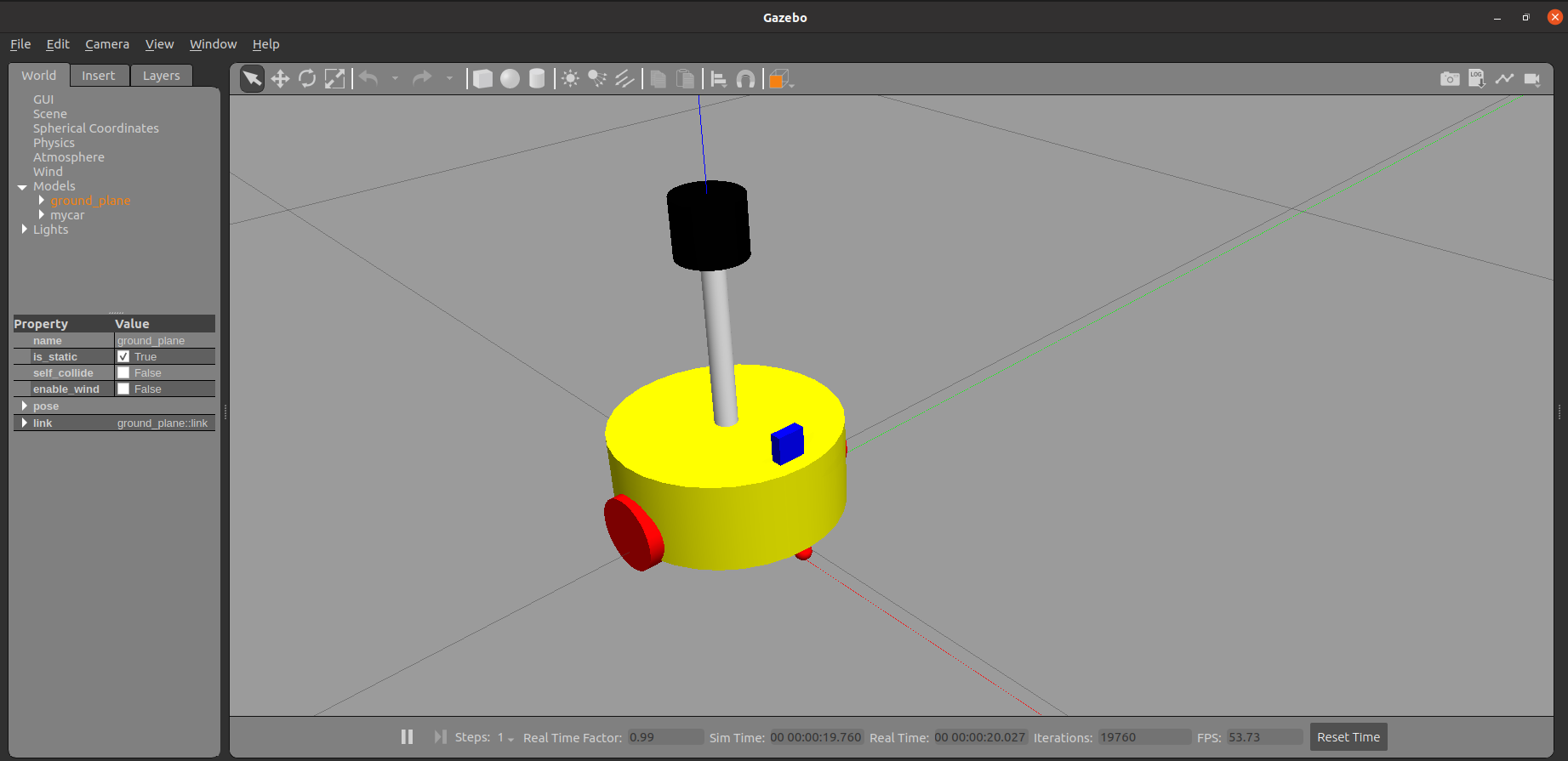
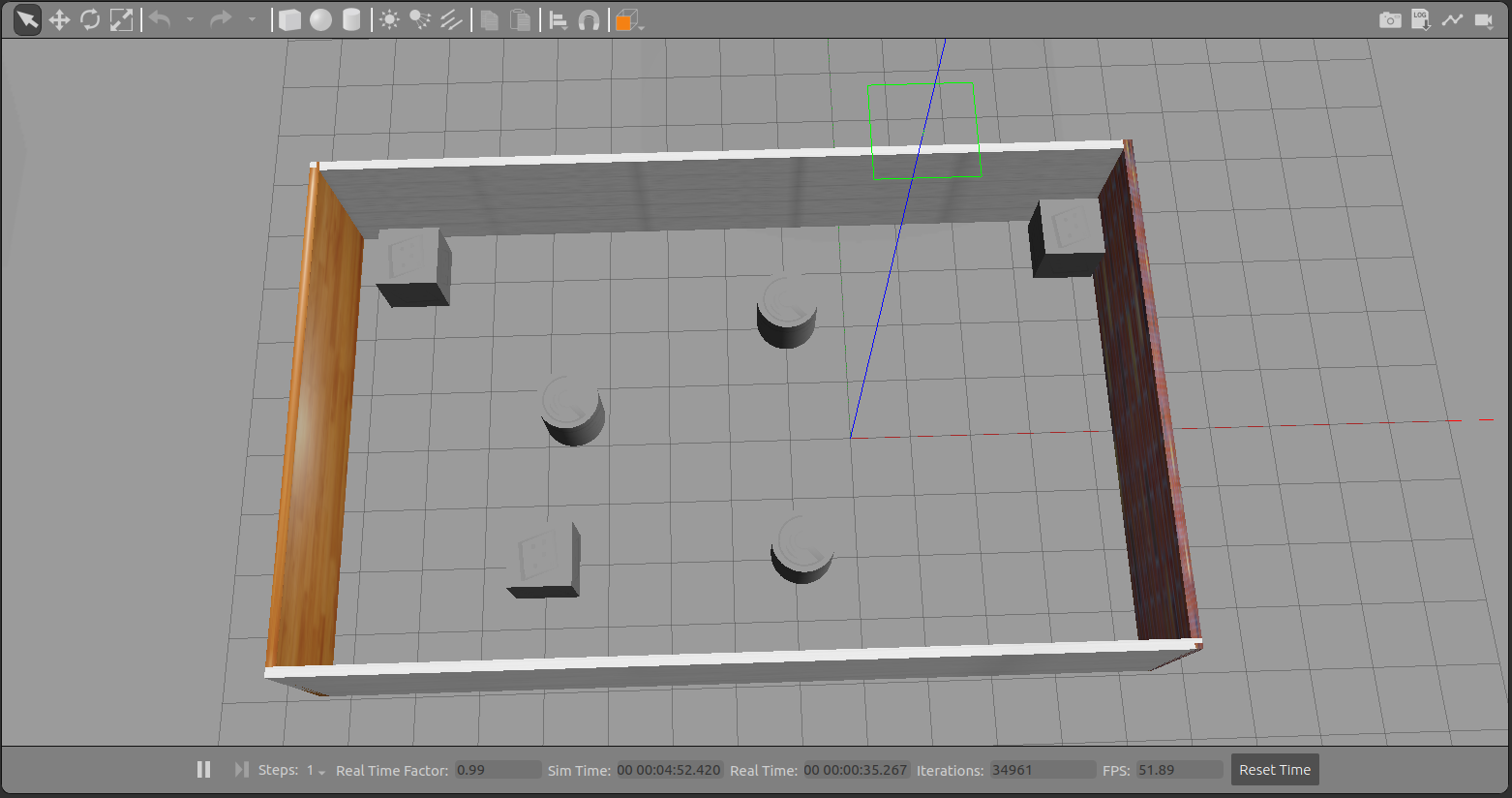
2.仿真环境搭建
3.控制机器人运动
4.雷达仿真
5.摄像头仿真