一、基本配置
访问并登录百度翻译开放平台:https://api.fanyi.baidu.com/
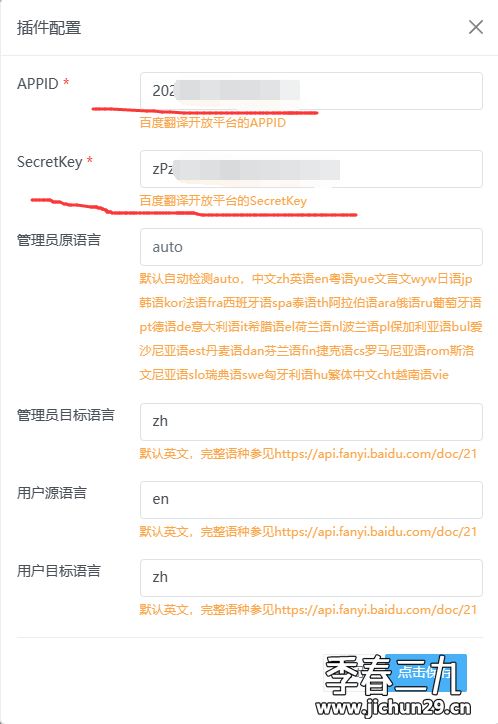
进入开发者信息获取 APP ID和密钥,并开通"通用文本翻译"服务

autMan应用市场->我的->找到"实时翻译"插件安装后去点击"配参"
二、使用示例
假如你和一个俄国人聊天,你可以这样设置:将俄国人、你真人、你的机器人拉到一个群里,记下群ID,记得要把你设置为机器人的管理员。实时翻译插件设置如下:
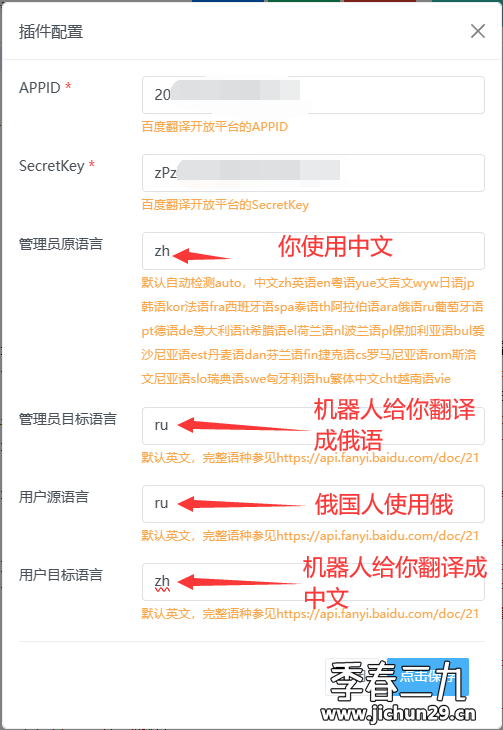
插件基本配置,关闭禁用,关闭管理员权限,设置你拉的这个群ID为白名单,防止其他群也开启翻译功能

当然如果你是和俄国人在tg上聊天,就不用拉你的tg机器人了,你的tg客户端账号和俄国人拉一个群就行了,而且你发出去的消息能自动带上翻译的俄语。
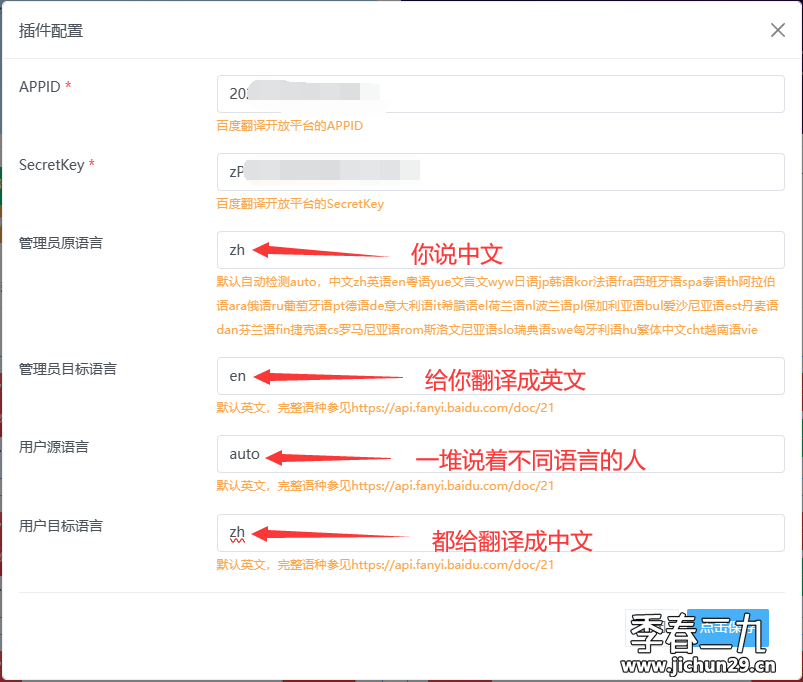
三、终极示例:
假如你和操着不同语言的一堆外国人在一个群里聊天,你机器人要在这个群里,可以这样设置