随着机器人技术的快速发展,遥操作机器人作为代替人类在危险环境中完成高危任务或在医疗领域完成远程精密手术的完美解决方案,正在快速进步,并有望成为拥有巨大潜力的机器人行业的全新发展方向。
本文将就推动机器人遥操作领域发展的力反馈手套展开讨论,带大家了解目前市场中几款热门的力反馈手套和其在遥操作机器人应用中的实际案例。
力反馈手套:在虚拟环境中身临其境遥操作机器人
SenseGlove Nova2力反馈手套
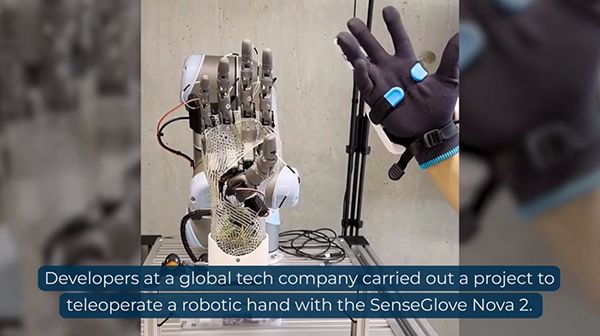
SenseGlove Nova 2是SenseGlove最新发布的一款触觉力反馈数据手套,手套结合了力反馈、振动触觉反馈和运动捕捉等功能,采用紧凑无线设计,佩戴、校准调试简单方便。

Senseglove Nova 2 首次加入了手掌主动式力反馈功能,这使得手套能够模拟在抓握情况下手掌部位的受力状态,为用户带来更加身临其境的操作体验。
精确的控制和交互
SenseGlove具备精确的手指追踪功能,能够准确地捕捉操作员手指的动作,这对于人形机器人的精细操作至关重要。例如,在进行复杂的装配任务或医疗手术辅助操作时,操作员可以通过手套精确地控制机器人的手指动作,完成各种复杂任务。
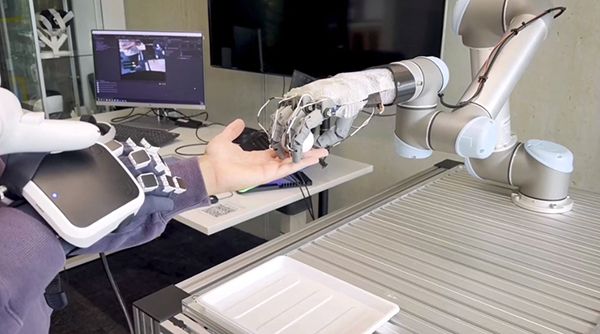
SenseGlove的力反馈系统能够在短时间内输出最大20N的阻力,让操作员在远程操作机器人时能够感受到机器人末端执行器握持物体的力度和触感。这使得操作员能够更准确地控制机器人的动作和力度,避免错误操作。
触觉反馈增强真实感
除了力反馈外,SenseGlove手套还具有振动触觉反馈功能,可以模拟按钮点击、冲击以及再现物体表面纹理等感觉。在控制机器人完成交互任务时,振动反馈功能可以让操作员更直观地感受机器人与周围环境的接触情况,例如机器人在抓取物体时是否稳定等。
SenseGlove Nova2力反馈手套结合了主动接触反馈、手掌冲击和手指追踪等先进的触觉反馈技术,使得操作员在远程操作时能够感受到物体的材质、纹理、重量以及大小和硬度等物理特性,从而增强了操作的真实感和沉浸感。
系统整合与通信
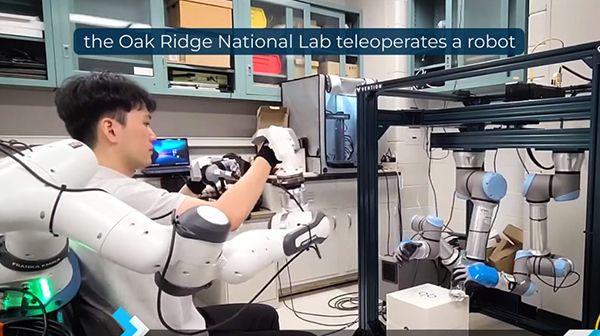
SenseGlove拥有强大的兼容性,可用于整合手套、机器人、虚拟现实头显等关键组件。以确保操作员能够在虚拟现实环境中对机器人进行直观的操作和控制。
SenseGlove的通信模块负责在手套、机器人手臂、虚拟现实头显等设备之间建立稳定、高效的通信连接。这确保了用户手部动作的信息能够及时、准确地传输到机器人手臂,同时机器人手臂的反馈信息和摄像机的图像信息也能够快速地传输给用户。
Dexta Robotics Dexmo力反馈手套
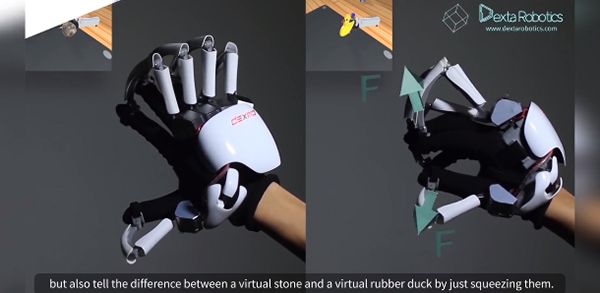
Dexmo是一款便携的力反馈手套,专为研究者,企业和消费者设计。它所提供的自然、直接的触感力反馈让每一位使用者都能真实与沉浸式VR世界中的物体完成交互。

Dexmo兼具手部动作捕捉与力反馈功能,为用户带来难忘的力反馈互动体验,手套可广泛应用于航空航天、工业培训、教育科研、医疗康复、仿真建模等领域。
功能与易用性兼备
Dexmo仅重300克左右。告别了市面其他产品笨重的体积和碍事的数据线,Dexmo提供无线的力反馈方案,外观简洁,荣获多个国际设计大奖。由1800毫安的锂电池供电,Dexmo可以无线连续工作6小时,电机可产生最大5 kg.cm的扭矩,这使得长时间、高性能的开发和使用体验成为可能。
真实、直接、自然的交互

Dexmo可捕捉11个自由度的手部动作。除了检测所有手指的弯曲和并拢动作外,它还为拇指引入了额外的旋转检测,使其能够最大限度地灵活捕捉手部动作。
多层刚度和可变力反馈

得益于高度定制的伺服电机,紧凑的电路设计和先进的控制算法,与其他同尺寸电机相比,Dexmo的直驱电机精度更高,扭矩输出更大,延迟更低,可模拟不同刚性物体抓握时的触感。Dexmo内置多个振动马达,这些马达可以产生真实的震动反馈,以模拟不同材质表面的触感。
CyberGlove CyberGrasp力反馈外骨骼系统
CyberGrasp系统是一个创新的手部力反馈系统。它可以让您"把手伸进你的电脑",抓住电脑生成的或远程操纵的物体。
外骨骼设备

CyberGrasp是一种轻型的力反射外骨骼设备,可以套在CyberGlove数据手套(有线版本)上,并为每个手指增加阻力反馈。通过CyberGrasp力反馈系统,用户能够在模拟的虚拟世界中感受计算机生成的3D对象的大小和形状。
五指单独编程
抓握力是由通过外骨骼传递到指尖的肌腱网络产生的。CyberGrasp有五个致动器,每个手指一个,可以单独编程,以防止用户的手指穿透或压碎虚拟固体物体。高带宽致动器位于小型致动器模块中,该模块可以放置在桌面上。此外,由于CyberGrasp系统不提供接地力,致动器模块也可以放在GraspPack背包中,便于携带操作,大大增加了有效工作空间。

该设备在整个运动范围内可施加垂直于指尖的抓握力,并且力可以单独指定。CyberGrasp系统允许手的全方位运动,并且不会妨碍佩戴者的运动。该设备完全可调,适合各种手型。
军事遥操作机器人应用
CyberGrasp系统最初被用于军事模拟训练和遥控机器人应用,它允许操作员控制远程机器人,并真实"感受"被操纵物体的尺寸、形状与刚性。