目录
[STM32 CAN控制器介绍](#STM32 CAN控制器介绍)
[CAN相关寄存器介绍(F1 / F4 / F7)](#CAN相关寄存器介绍(F1 / F4 / F7))
[CAN 标识符寄存器(CAN_(T/R)IxR)](#CAN 标识符寄存器(CAN_(T/R)IxR))
[CAN 过滤器FIFO关联寄存器(CAN_FFA1R)](#CAN 过滤器FIFO关联寄存器(CAN_FFA1R))
[CAN 过滤器组x寄存器(CAN_FxR(1/2))](#CAN 过滤器组x寄存器(CAN_FxR(1/2)))
CAN****介绍
CAN(Controller Area Network),是ISO国际标准化的串行通信协议。
为了满足汽车产业的"减少线束的数量"、"通过多个LAN,进行大量数据的高速通信"的需求。

低速CAN(ISO11519)通信速率10~125Kbps,总线长度可达1000米
高速CAN(ISO11898)通信速率125Kbps~1Mbps,总线长度≤40米(经典CAN)
CAN FD 通信速率可达5Mbps,并且兼容经典CAN,遵循ISO 11898-1 做数据收发
更多CAN的历史知识,可以上CAN in Automation(CiA) 官网了解。
CAN****总线拓扑图

终端电阻,用于阻抗匹配,以减少回波反射
CAN总线由两根线( CANL 和 CANH )组成,允许挂载多个设备节点(低速CAN:20 高速CAN:30)。
CAN****总线特点
1)多主控制 每个设备都可以主动发送数据
2)系统的柔软性 没有类似地址的信息,添加设备不改变原来总线的状态
3)通信速度 速度快,距离远
4)错误检测&错误通知&错误恢复功能
5)故障封闭 判断故障类型,并且进行隔离
6)连接节点多 速度与数量找个平衡
CAN****应用场景
CAN总线协议已广泛应用在汽车电子、工业自动化、船舶、医疗设备、工业设备等方面。
CAN****物理层
CAN使用差分信号进行数据传输,根据CAN_H和CAN_L上的电位差来判断总线电平。
总线电平分为显性电平(逻辑0)和隐性电平(逻辑1),二者必居其一。
显性电平具有优先权。发送方通过使总线电平发生变化,将消息发送给接收方。

|---------|-----------------------|---------------------------|
| 电平 | 高速CAN | 低速CAN |
| 显性电平(0) | UCAN_H -- UCAN_L= 2V | UCAN_H -- UCAN_L = 3V |
| 隐性电平(1) | UCAN_H -- UCAN_L = 0V | UCAN_H -- UCAN_L = - 1.5V |
CAN收发器芯片介绍

CAN****协议层
CAN总线以"帧"形式进行通信。CAN协议定义了5种类型的帧:数据帧、遥控帧、错误帧、过载帧、间隔帧,其中数据帧最为常用。

数据帧介绍
数据帧由7段组成。数据帧又分为标准帧(CAN2.0A)和扩展帧(CAN2.0B),主要体现在仲裁段和控制段。

CAN****位时序介绍
CAN总线以"位同步"机制,实现对电平的正确采样。位数据都由四段组成:同步段(SS)、传播时间段(PTS)、相位缓冲段1(PBS1)和相位缓冲段2(PBS2),每段又由多个位时序Tq组成。

注意 : 节点监测到总线上信号的跳变在SS段范围内,表示节点与总线的时序是同步,此时采样点的电平即该位的电平。
采样点是指读取总线电平,并将读到的电平作为位值的点。
根据位时序,就可以计算CAN通信的波特率。
数据同步过程
由于时钟频率误差、传输上的相位延迟引起偏差,所以需要数据同步
CAN为了实现对总线电平信号的正确采样,数据同步分为硬件同步和再同步。
硬件同步
节点通过CAN总线发送数据,一开始发送帧起始信号。总线上其他节点会检测帧起始信号在不在位数据的SS段内,判断内部时序与总线是否同步。
假如不在SS段内,这种情况下,采样点获得的电平状态是不正确的。所以,节点会使用硬件同步方式调整, 把自己的SS段平移到检测到边沿的地方,获得同步,同步情况下,采样点获得的电平状态才是正确的。
再同步
再同步利用普通数据位的边沿信号(帧起始信号是特殊的边沿信号)进行同步。
再同步的方式分为两种情况:超前和滞后,即边沿信号与SS段的相对位置。

再同步时,PSB1和PSB2中增加或者减少的时间被称为"再同步补偿宽度(SJW)",其范围:1~4 Tq。
限定了SJW值后,再同步时,不能增加限定长度的SJW值。SJW值较大时,吸收误差能力更强,但是通讯速度会下降。
CAN****总线仲裁
决定优先级
CAN总线处于空闲状态,最先开始发送消息的单元获得发送权。
多个单元同时开始发送时,从仲裁段(报文ID)的第一位开始进行仲裁。连续输出显性电平最多的单元可继续发送,即首先出现隐性电平的单元失去对总线的占有权变为接收。

竞争失败单元,会自动检测总线空闲,在第一时间再次尝试发送。
STM32 CAN****控制器介绍
STM32 CAN控制器(bxCAN),支持CAN 2.0A 和 CAN 2.0B Active版本协议。
CAN 2.0A 只能处理标准数据帧且扩展帧的内容会识别错误,而CAN 2.0B Active 可以处理标准数据帧和扩展数据帧。CAN 2.0B Passive只能处理标准数据帧且扩展帧的内容会忽略。
bxCAN主要特点:
波特率最高可达1M bps
支持时间触发通信(CAN的硬件内部定时器可以在TX/RX的帧起始位的采样点位置生成时间戳)
具有3级发送邮箱
具有3级深度的2个接收FIFO
可变的过滤器组(最多28个)(F1只有14个)
CAN****控制器模式
CAN控制器的工作模式有三种:初始化模式、正常模式和睡眠模式。

CAN****控制器模式
CAN控制器的测试模式有三种:静默模式、环回模式和环回静默模式。(初始化模式下进行配置)

CAN****控制器框图

1)CAN内核
包含各种控制/状态/配置寄存器,可以配置模式、波特率等
2)发送邮箱
用来缓存待发送的报文,最多可以缓存3个报文
3)接收FIFO
缓存接收到的有效报文
4)接收过滤器
筛选有效报文
发送处理

接收处理

接收过滤器
当总线上报文数据量很大时,总线上的设备会频繁获取报文,占用CPU。过滤器的存在,选择性接收有效报文,减轻系统负担。
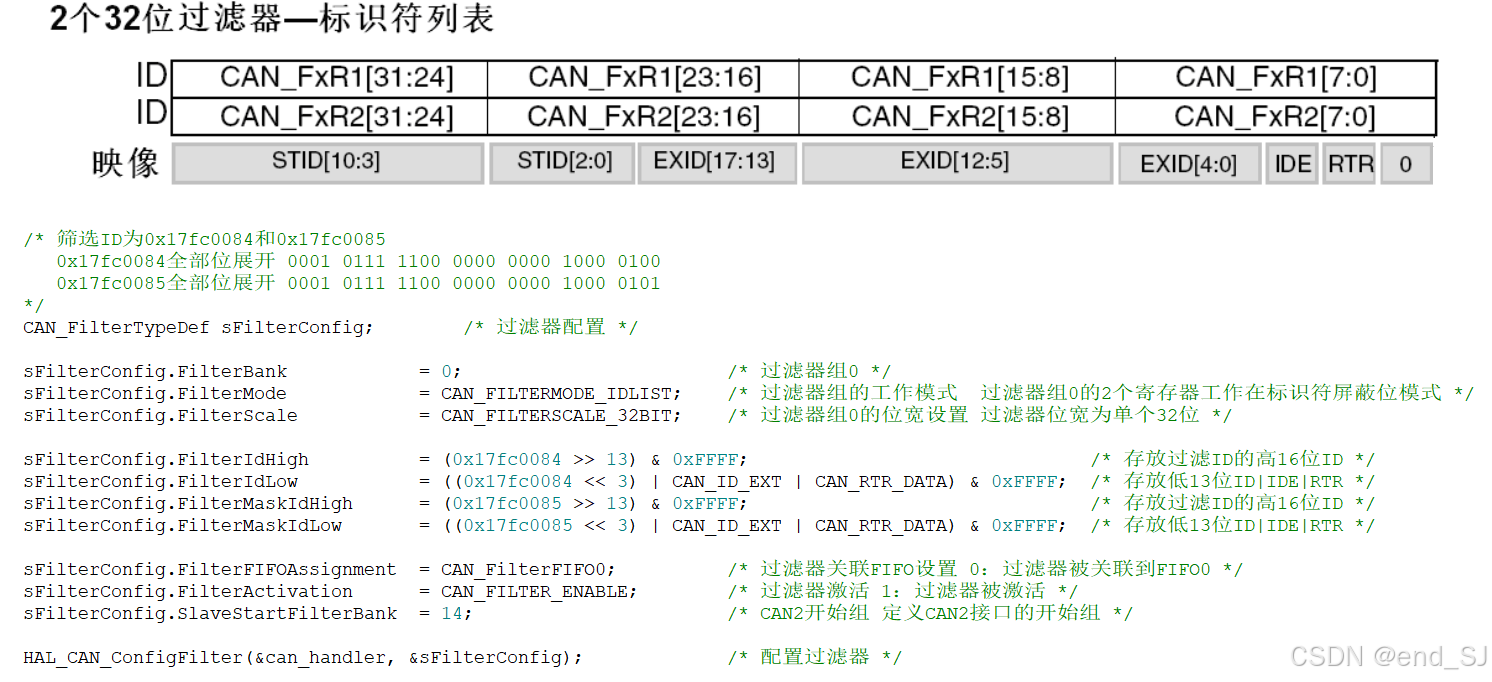
每个过滤器组都有两个32位寄存器CAN_FxR1和CAN_FxR2。根据过滤器组的工作模式(位宽和选择模式)不同,寄存器的作用不尽相同。

选择模式可设置屏蔽位模式或标识符列表模式,寄存器内容的功能就有所区别。
屏蔽位模式,可以选择出一组符合条件的报文。寄存器内容功能相当于是否符合条件。
标识符列表模式,可以选择出几个特定ID的报文。寄存器内容功能就是标识符本身。
REG中bit值代表的是匹配与否:1必须匹配 0不用关心


屏蔽位寄存器中位值为1,表示与ID要必须匹配;位值为0,表示可不与ID匹配。
在使能过滤器情况下,总线上广播的报文ID与过滤器的配置都不匹配,CAN控制器会丢弃该报文,不会进入到接收FIFO中。
注意:标识符选择位IDE和帧类型RTR需要一致。不同过滤器组的工作模式可以设置为不同。
CAN****控制器位时序

STM32的CAN外设位时序分为三段:
同步段 SYNC_SEG、 时间段1 BS1(PTS + PBS1)、 时间段2 BS2

STM32F103,设TS1=8、TS2=7、BRP=3,波特率 = 36000 / ( 9 + 8 + 1 ) \* 4 = 500Kbps。
STM32F407,设TS1=6、TS2=5、BRP=5,波特率 = 42000 / ( 7 + 6 + 1 ) \* 6 = 500Kbps。
注意:通信双方波特率需要一致才能通信成功。
CAN相关寄存器介绍(F1 / F4 / F7)

CAN****主控制寄存器(CAN_MCR)

 INRQ位,用于控制初始化请求。
INRQ位,用于控制初始化请求。
CAN****位时序寄存器(CAN_BTR)

STM32F103,设TS1=8、TS2=7、BRP=3,波特率 = 36000 / ( 9 + 8 + 1 ) \* 4 = 500Kbps
**CAN****标识符寄存器(**CAN_(T/R)IxR)
x范围:1~3,3个发送邮箱 x范围:1~2,2个接收FIFO邮箱

报文使用标准标识符,EXID17:0值无效
TxRQ位置1,请求邮箱发送
注意:报文使用扩展标识符时,STID10:0等效于EXID28:18,与EXID17:0组成29位扩展标识符。
**数据长度和时间戳寄存器(**CAN_(T/R)DTxR)
x范围:1~3,3个发送邮箱 x范围:1~2,2个接收FIFO邮箱

注意:DLC是多少,数据内容就有多少字节被发送,并不是每次都发送8个字节数据。
**CAN****低位数据寄存器(**CAN_(T/R)DLxR)

**CAN****高位数据寄存器(**CAN_(T/R)DHxR)
 使用时间戳功能DLC必须为8字节
使用时间戳功能DLC必须为8字节
CAN****过滤器模式寄存器(CAN_FM1R)

CAN****过滤器位宽寄存器(CAN_FS1R)

注意:CAN外设只能使用的有的过滤器组,不能使用没有的过滤器组。
CAN过滤器FIFO****关联寄存器(CAN_FFA1R)

该寄存器决定了哪个FIFO寄存器有效(即RIxR、RDTxR、RDLxR、RDHxR的'x')。
CAN过滤器组x寄存器(CAN_FxR(1/2))

CAN相关HAL库驱动介绍

CAN外设相关重要结构体:
CAN_InitTypeDef、CAN_FilterTypeDef和CAN_(T/R)xHeaderTypeDef
cpp
CAN_InitTypeDef
uint32_t Prescaler /* 预分频 */
uint32_t Mode /* 工作模式 */
uint32_t SyncJumpWidth /* 再次同步跳跃宽度 */
uint32_t TimeSeg1 /* 时间段1(BS1)长度 */
uint32_t TimeSeg2 /* 时间段2(BS2)长度 */
uint32_t TimeTriggeredMode /* 时间触发通信模式 */
uint32_t AutoBusOff /* 总线自动关闭 */
uint32_t AutoWakeUp /* 自动唤醒 */
uint32_t AutoRetransmission /* 自动重传 */
uint32_t ReceiveFifoLocked /* 接收FIFO锁定 */
uint32_t TransmitFifoPriority /* 传输FIFO优先级 */
cpp
CAN_FilterTypeDef
uint32_t FilterIdHigh /* ID高字节 */
uint32_t FilterIdLow /* ID低字节 */
uint32_t FilterMaskIdHigh /* 掩码高字节 */
uint32_t FilterMaskIdLow /* 掩码低字节 */
uint32_t FilterFIFOAssignment /* 过滤器关联FIFO */
uint32_t FilterBank /* 选择过滤器组 */
uint32_t FilterMode /* 过滤器模式*/
uint32_t FilterScale /* 过滤器位宽 */
uint32_t FilterActivation /* 过滤器使能 */
Uint32_t SlaveStartFilterBank /* 从CAN选择启动过滤器组 单CAN没有意义*/结构体成员与寄存器情况


CAN****基本驱动步骤
1、CAN参数初始化
工作模式、波特率等 HAL_CAN_Init
2、使能CAN时钟和初始化相关引脚
GPIO模式设为复用功能模式 HAL_CAN_MspInit
3、设置过滤器
HAL_CAN_ConfigFilter 完成过滤器的初始化
4、CAN数据接收和发送
HAL_CAN_AddTxMessage 发送消息
HAL_CAN_ GetRxMessage 接收数据
5、使能CAN相关中断/设置NVIC/编写中断服务函数
__HAL_CAN_ENABLE_IT (可选)
过滤器组设置实例:

关于CAN中断
启用 CAN 接收 FIFO0 消息挂起中断
cpp
__HAL_CAN_ENABLE_IT(&g_can_handle_struct, CAN_IT_RX_FIFO0_MSG_PENDING);__HAL_CAN_ENABLE_IT:这是 STM32 HAL 库提供的一个宏,用于启用 CAN 外设的中断。CAN_IT_RX_FIFO0_MSG_PENDING:这个参数表示启用 CAN 接收 FIFO0 消息挂起中断 。- 当 CAN 接收 FIFO0 中有新的消息并且该消息已经准备好时,控制器会触发一个中断,允许外部应用程序处理接收到的消息。
- FIFO(先进先出队列)用于存储接收到的 CAN 消息,FIFO0 是第一个 FIFO 队列,STM32 的 CAN 控制器通常有多个 FIFO 队列。
是的,您的理解是正确的。进入挂起中断后,您可以读取 can_rxheader_struct.StdId,因为当 CAN 控制器收到数据并通过过滤器后,会将其存放到 FIFO 队列中。中断会在 FIFO 中有新消息时触发,并通过 HAL 函数 HAL_CAN_GetRxMessage 将数据读取出来。
详细解释:
1. CAN 接收机制概述
- CAN 总线是一个广播式协议,当总线上有设备发送消息时,所有连接的设备都能接收到这条消息。
- 过滤器:CAN 控制器通常配置了过滤器来筛选感兴趣的消息,只有经过过滤器允许的消息才会被接收并存储到接收 FIFO 中。STM32 的 CAN 控制器可以通过配置多个过滤器来选择哪些消息应当接收。
- FIFO 队列:接收到的有效消息会被存储到接收 FIFO(如 FIFO0)。消息排队存储,等待被中断服务程序处理。
2. 中断触发
当接收到一条消息,并且通过了过滤器的检查后,消息就会被存储到 FIFO 中。此时,如果启用了接收中断(例如通过 CAN_IT_RX_FIFO0_MSG_PENDING),并且 FIFO 中有新消息,CAN 中断会被触发。
3. 读取接收的消息
- 在进入中断处理函数
USB_LP_CAN1_RX0_IRQHandler后,您可以通过HAL_CAN_GetRxMessage函数读取接收到的消息,并将消息的相关信息(如标识符)和数据存储到相应的结构体中。 - 读取的消息头信息(如
StdId、IDE、RTR、DLC等)通常存储在CAN_RxHeaderTypeDef结构体中
4. 总结
- 数据是被动接收的:当总线上有数据并且经过了过滤器的过滤,符合条件的消息会被存储到 FIFO 中。
- 进入中断后,可以读取
can_rxheader_struct.StdId:一旦中断被触发,您可以通过HAL_CAN_GetRxMessage读取消息的标识符和数据,标识符信息存储在can_rxheader_struct.StdId中。 - 过滤器的作用:过滤器用于筛选总线上接收到的消息,只有符合条件的消息才会存放到 FIFO 中,并触发中断。