算子var_threshold
名称
var_threshold --- 通过局部均值和标准差分析对图像进行阈值处理。
签名
var_threshold(Image : Region : MaskWidth, MaskHeight, StdDevScale, AbsThreshold, LightDark : )
描述
使用 var_threshold 算子,可以选择输入图像 Image 中满足以下条件的像素:
-
具有较高的局部标准差(当
StdDevScale为正值时),或者具有较低的局部标准差(当StdDevScale为负值时)。 -
根据
LightDark参数,在局部区域内为亮像素或暗像素。
因此,该算子能够在不均匀、有噪声或光照不均匀的背景下分割出目标区域。
输入参数提示
-
MaskWidth,MaskHeight:-
由
MaskWidth和MaskHeight定义的滤波模板大小决定了要分割对象的最大尺寸。然而,如果模板选择得过大,彼此非常接近的对象可能会被合并。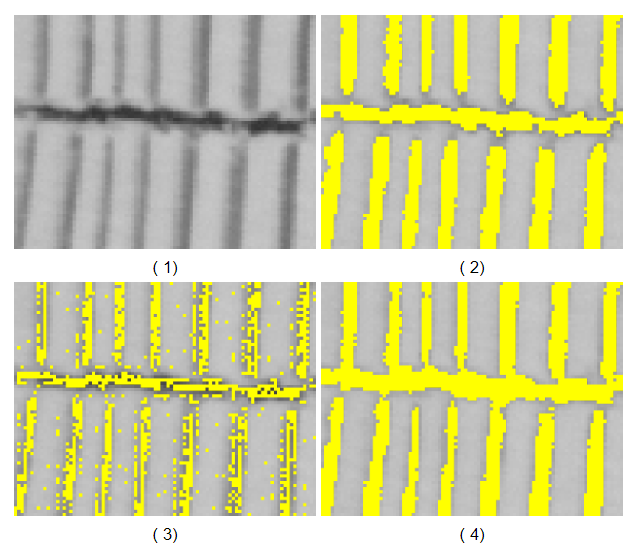
-
(1)原始图像;目标是对垂直线条进行计数。(2)
MaskWidth设为 12,MaskHeight设为 12,StdDevScale设为 0.1,所有垂直线条都被正确分割。(3)如果模板尺寸选择得过小(设为 3),则无法正确选择所需区域。(4)如果模板尺寸过大(设为 40),彼此非常接近的对象可能会被合并。 -
如果
MaskWidth或MaskHeight为偶数,则会使用下一个更大的奇数。总体而言,3 可以被认为是最小的合理值。
-
-
StdDevScale:-
局部标准差用于衡量图像中的噪声。可以通过
StdDevScale对其进行缩放,以反映所需的灵敏度。值越高,意味着只选择与周围像素差异非常大的像素。 -
对于参数
StdDevScale,取值在 -1.0 到 1.0 之间是比较合理的选择,建议值为 0.2。如果该参数设置得过高或过低,可能会返回空区域或全区域。
-
(1)如果
StdDevScale设置得过高(设为 1.3),算子会变得"挑剔",只选择与周围像素非常相似的像素。(2)如果StdDevScale设置得过低(设为 -0.3),会错误地选择过多与周围像素有些相似的像素。
-
-
AbsThreshold:- 在图像的均匀区域中,标准差较低,因此单个灰度值的影响较大。为了降低算子在均匀区域的灵敏度,可以调整
AbsThreshold参数。这样,就可以忽略均匀背景中较小的灰度值变化。需要注意的是,当StdDevScale为负值时,AbsThreshold也应选择负值。
- 在图像的均匀区域中,标准差较低,因此单个灰度值的影响较大。为了降低算子在均匀区域的灵敏度,可以调整
-
LightDark:-
'light'或'dark'分别返回比其周围像素更亮或更暗的所有像素。 -
'equal'返回未被上述两种选项选中的所有像素,即与周围像素相对相等的像素。 -
'not_equal'返回'light'和'dark'的组合结果,即所有与周围像素不同的像素。
-
计算过程
-
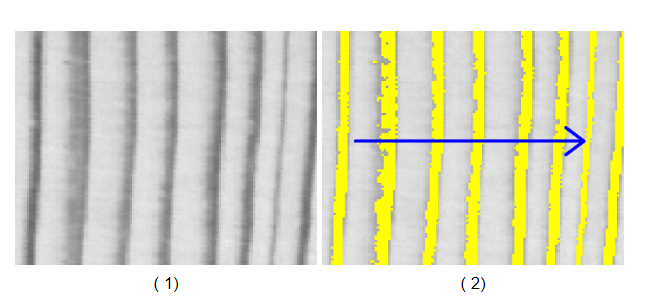
(1)初始图像。(2)经过阈值处理后的图像(
StdDevScale设为 0.6,MaskWidth设为 15,MaskHeight设为 15,AbsThreshold设为 10)。以下图像以示例方式展示了沿蓝色箭头方向的结果是如何得到的。 -
var_threshold算子从输入图像Image中选择满足阈值条件的区域Region。阈值是根据每个像素 (x, y) 周围大小为MaskWidthxMaskHeight的局部模板内的平均灰度值和标准差计算得出的。
设:
-
g(x,y)为输入图像Image中位置 (x, y) 处的灰度值。 -
m(x,y)为相应的平均灰度值。 -
d(x,y)为该像素周围模板内的相应标准差。

即这些像素周围模板内的原始灰度值、相应的平均灰度值和相应的标准差。
那么,可变阈值 v(x,y) 定义如下
v(x,y) = max(StdDevScale \* d(x,y), AbsThreshold) \\;\\ for \\;\\ StdDevScale \\geqslant 0
or
v(x,y) = min( StdDevScale \* d(x,y), AbsThreshold) \\;\\; for \\;\\; StdDevScale \\leqslant 0
- 解释:当
StdDevScale为正值时,会分析每个像素。确定用户定义的AbsThreshold和缩放后的标准差哪个更大,选择较大的值作为可变阈值v(x,y)。当StdDevScale为负值时,则选择相应的较小值。
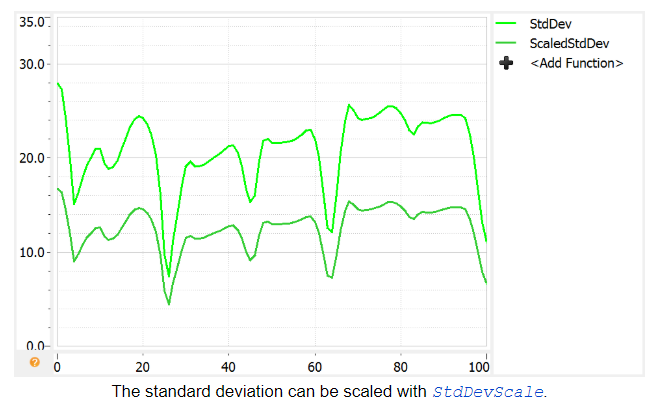
可以使用 StdDevScale 对标准差进行缩放。
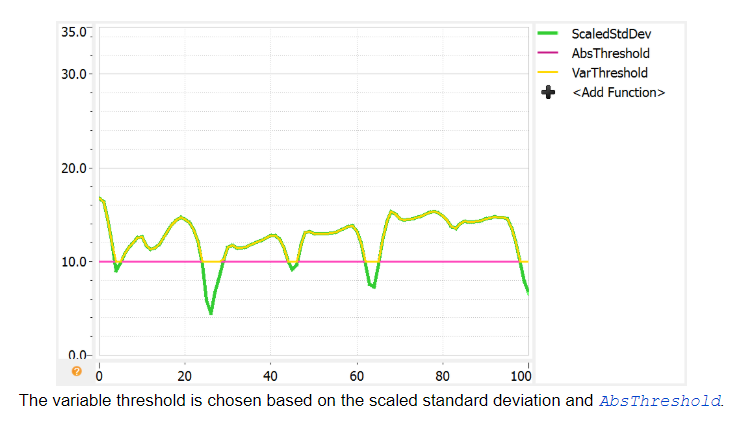
可变阈值是根据缩放后的标准差和 AbsThreshold 来选择的。
根据可变阈值选择哪些像素由参数 LightDark 决定:
-
'light':g(x,y) \\ge m(x,y)+v(x,y)
- 解释:如果某个像素比其周围像素亮
v(x,y)个灰度值,则该像素被选中。
- 解释:如果某个像素比其周围像素亮
-
'dark':g(x,y) \\le m(x,y)-v(x,y)
- 解释:如果某个像素比其周围像素暗
v(x,y)个灰度值,则该像素被选中。
- 解释:如果某个像素比其周围像素暗
-
LightDark = 'equal':m(x,y)-v(x,y)\\le g(x,y)\\le m(x,y)+v(x,y)
- 解释:精确选择那些未被
'light'和'dark'选中的像素,即与周围像素相对相等的像素。
- 解释:精确选择那些未被
-
'not_equal':m(x,y)-v(x,y)\\ge g(x,y) \\; \\or \\: g(x,y) \\ge m(x,y)+v(x,y)
-
解释:选择
'light'和'dark'两种情况下的所有像素,即所有与周围像素相差v(x,y)个灰度值的像素。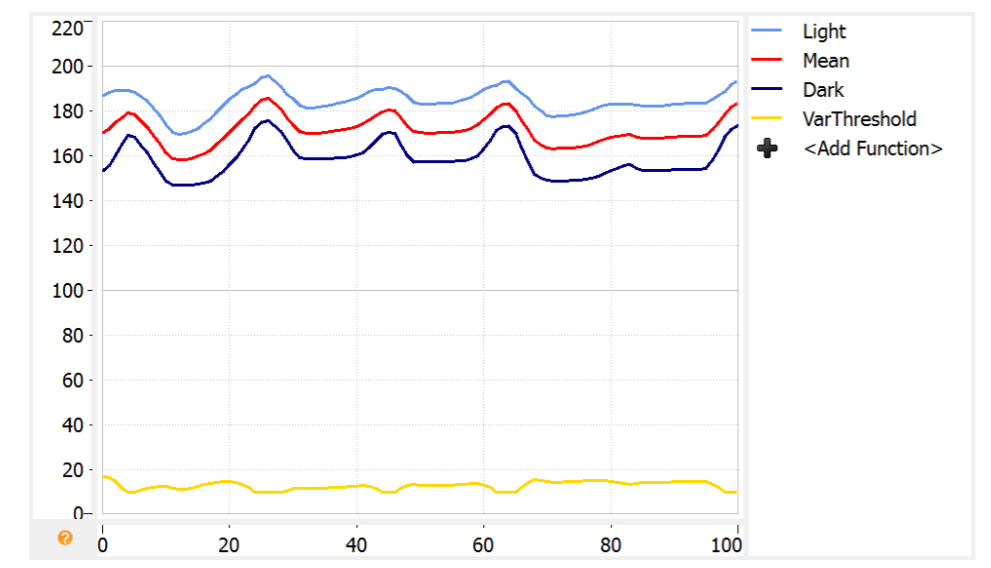
-
'light' 和 'dark' 是根据相应的平均灰度值和可变阈值计算得出的。
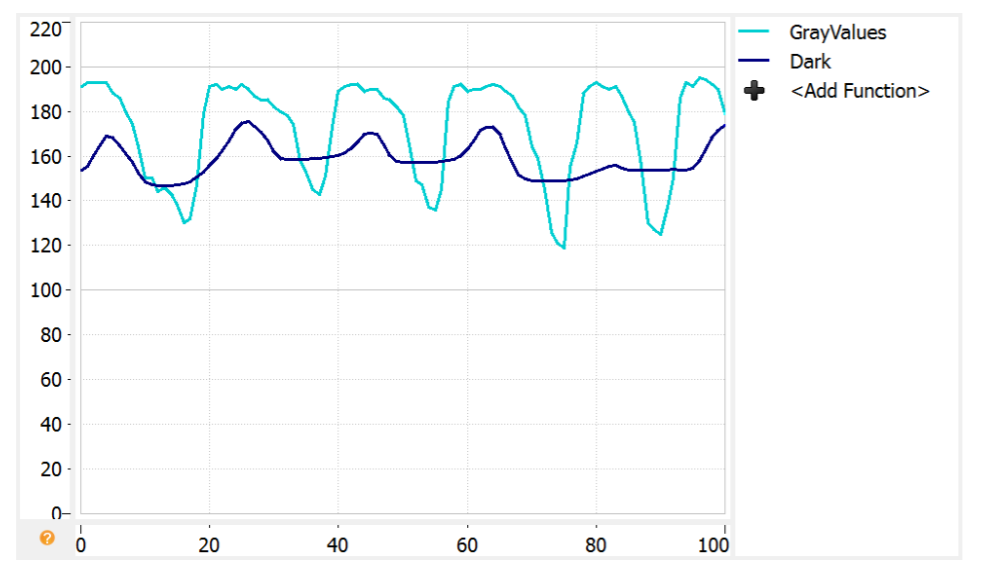
例如,如果选择了 "暗(dark)" 选项,那么所有 "暗曲线" 高于 "灰度值曲线" 的像素都会被选中
注意事项
请注意,如果使用具有缩小定义域的图像作为输入,滤波算子可能会返回意外结果。请参考"滤波器"章节。
参数
-
Image(输入对象) 单通道图像(数组) → 对象(byte/int2/int4/uint2/real)- 输入图像。
-
Region(输出对象) 区域(数组) → 对象- 分割后的区域。
-
MaskWidth(输入控制) 范围.x → (整数)-
用于计算均值和标准差的模板宽度。
-
默认值:15
-
建议值:9, 11, 13, 15
-
限制条件:
MaskWidth >= 1
-
-
MaskHeight(输入控制) 范围.y → (整数)-
用于计算均值和标准差的模板高度。
-
默认值:15
-
建议值:9, 11, 13, 15
-
限制条件:
MaskHeight >= 1
-
-
StdDevScale(输入控制) 数值 → (实数 / 整数)-
灰度值标准差的缩放因子。
-
默认值:0.2
-
建议值:-0.2, -0.1, 0.1, 0.2
-
-
AbsThreshold(输入控制) 数值 → (实数 / 整数)-
与均值的最小灰度值差异。
-
默认值:2
-
建议值:-2, -1, 0, 1, 2
-
-
LightDark(输入控制) 字符串 → (字符串)-
阈值类型。
-
默认值:
'dark' -
取值列表:
'dark','equal','light','not_equal'
-
复杂度
设 A 为输入区域的面积,则运行时间为 O(A)。
结果
如果所有参数正确,var_threshold 算子返回 2 (H_MSG_TRUE)。可以通过 set_system 函数设置标志 'no_object_result'、'empty_region_result' 和 'store_empty_region' 的值来确定对输入图像和输出区域的处理方式。必要时会抛出异常。
替代算子
dyn_threshold,threshold
参考文献
W.Niblack,《数字图像处理导论》,第 115 - 116 页,新泽西州恩格尔伍德克利夫斯,普伦蒂斯·霍尔出版社,1986 年
模块
基础模块
HDevelop 例程
-
var_threshold.hdev:使用根据局部均值和标准差计算得到的局部阈值对图像进行分割。 -
label_word_process_mlp.hdev:使用基于多层感知器(MLP)的 OCR 分类器和词典读取保质期标签,以提高识别结果。 -
check_smd_tilt.hdev:检查表面贴装器件(SMD)是否倾斜。 -
check_blister.hdev:检查自动填充的泡罩包装的内容物。