IMU
IMU(Inertial Measurement Unit ,惯性测量单元)是一种通过惯性传感器测量物体 三轴角速度 和 三轴线加速度 的电子设备。它是无人系统(如机器人、无人机、自动驾驶汽车)的核心传感器之一,用于实时感知运动状态。
MU 是什么:测量角速度和线加速度的惯性传感器组合。
IMU的作用
(1) 运动感知
-
角速度 (陀螺仪):
测量机器人绕 X/Y/Z 轴的旋转速度(如转弯、倾斜)。
示例:无人机翻滚时,陀螺仪检测到绕 X 轴的角速度。 -
线加速度 (加速度计):
测量机器人沿三轴的加速度(含重力)。
示例:汽车加速时,加速度计检测到正向加速度。
(2) 姿态估计
通过融合角速度和加速度数据,可计算机器人的 实时姿态(Roll俯仰、Pitch横滚、Yaw偏航角)。
-
短时精度:依赖陀螺仪积分(高频响应,但会漂移)。
-
长时稳定:依赖加速度计和磁力计校正(低频但无累积误差)。
(3) 辅助定位
-
在 GPS 失效时(如隧道、室内),IMU 通过 航位推算(Dead Reckoning)提供短期位置估计。
-
与轮式里程计融合,提升 SLAM 或 导航系统 的鲁棒性。
本质直接的目的就是为了测量物体在三个轴上的角速度和加速度。
鲁棒性
鲁棒性 (Robustness)是指系统在 参数波动、外部干扰或异常输入 下,仍能保持预期功能或性能的能力。简单来说,就是系统的"抗折腾"能力。
IMU的数学原理
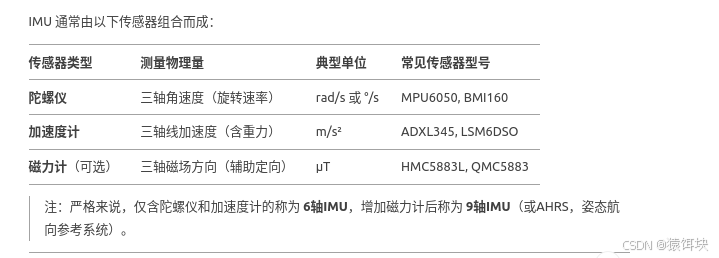
IMU的组成
IMU的噪声
IMU噪声不是声音层面的噪声,而是电信号,比如电流,典雅的波动。
IMU(惯性测量单元)的噪声是指传感器输出信号中存在的非理想扰动,它会干扰真实运动信息的提取。