1、macOS环境及版本

2、docker for macos版本

3、拉取ROS2镜像
bash
docker pull ros:iron 
4、查看容器
bash
docker images
5、启动 ROS2 容器
bash
docker run -it --rm ros:iron-it :以交互模式运行容器。
--rm :退出时自动删除容器(测试时推荐)。

6、在容器内安装必要工具
进入容器后,执行以下命令更新并安装工具:
bash
apt update && apt install -y ros-iron-ros2cli ros-iron-demo-nodes-cpp ros-iron-ros2cli :ROS2 命令行工具。
ros-iron-ros2cli :ROS2 命令行工具。
ros-iron-demo-nodes-cpp :C++ 示例节点。
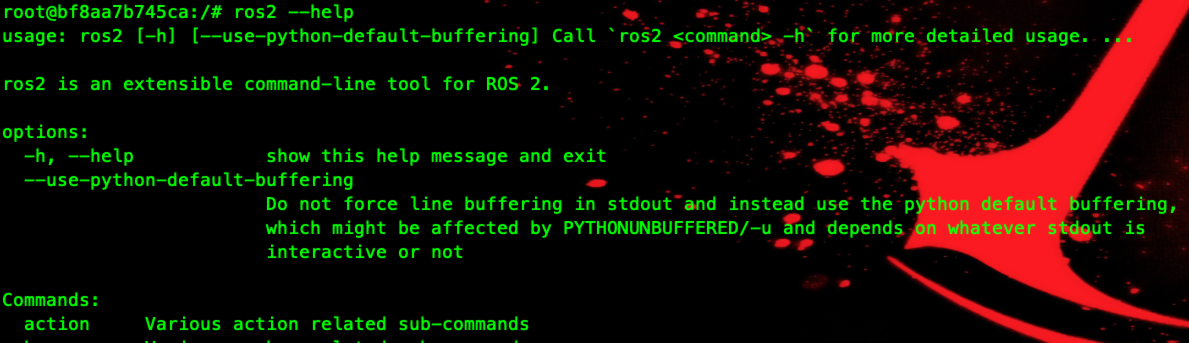
7、验证 ROS2 安装
检查 ROS2 版本 :ros2 --help
查看已安装的包 :ros2 pkg list | grep demo_nodes

8、新打开终端运行
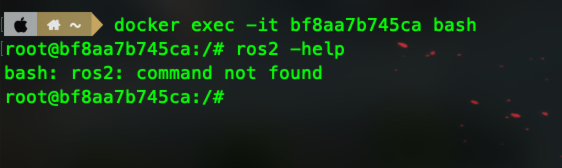
其中,bf8aa7b745ca,是对应容器ID
此时运行,ros2 -help 会报错,提示: bash: ros2: command not found
解决方式,就是手动加载 ROS2 环境,在终端输入:
bash
source /opt/ros/iron/setup.bash其中,iron 就是ros版本
此时,在两个终端分别输入:
终端1:
bash
ros2 run demo_nodes_cpp talker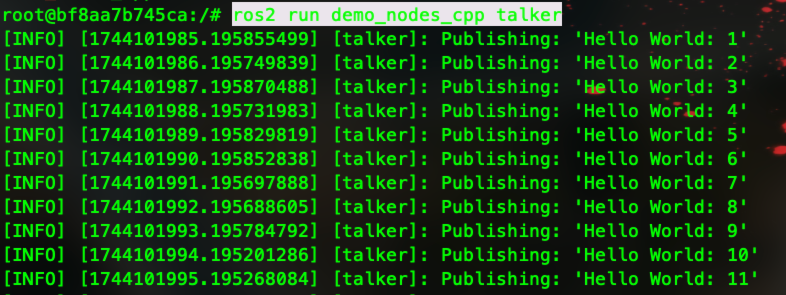
终端2:
bash
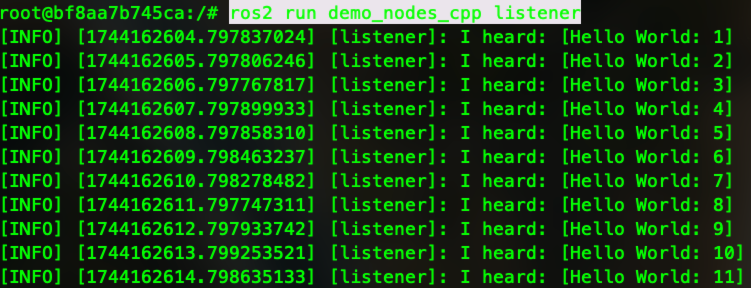
ros2 run demo_nodes_cpp listener