步骤一.创建虚拟环境
python
conda create -n yolov12 python=3.8.20注意:YOLOv12/YOLOv11/YOLOv10/YOLOv9/YOLOv8/YOLOv7a/YOLOv5 环境通用
步骤二.激活虚拟环境
python
conda activate yolov12 #激活环境步骤三.查询Jetpack出厂版本
Jetson系列平台各型号支持的最高Jetpack版本:
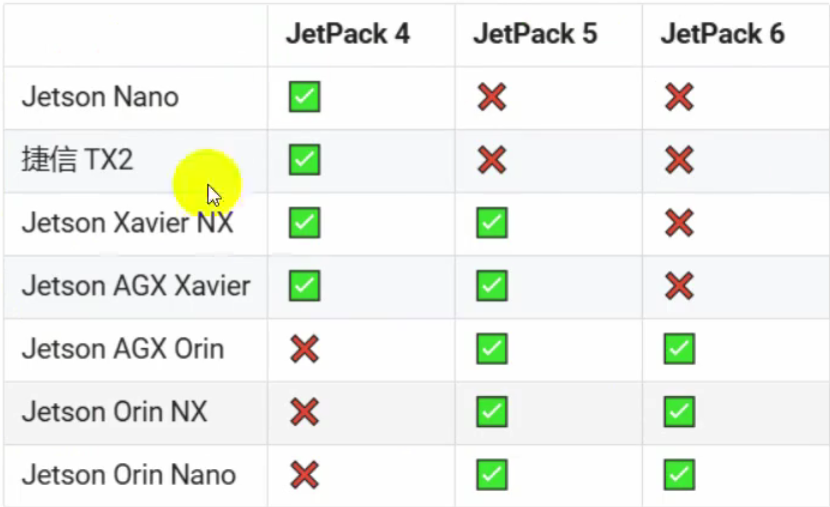
注意:涉及JetPack版本大升级5->6,需要用官方工具重做系统,
查看当前出厂版本
python
apt-cache show nvidia-jetpack #查看jetpack版本步骤四.Pytorch安装
安装流程(关键)
YOLOv12官方配置环境要求Pytorch版本为2.2.2,笔者JetsonOrinNX的出厂JetPack版本为5.1.3,故按照英伟达官方对于Jetson提供的预编译包链接,选择链接中最贴近2.2版本的torch进行离线下载,再用命令行进行安装。
离线安装:
Torch下载链接
http:// developer.download.nvidia.cn/compute/redist/jp/v51/pytorch/
注意:链接中的v51就是jetpack5.1版本,大家可根据自己版本修改此处,得到新链接内容,再选择需要的torch版本。
链接打开后如图所示:

安装指令
python
pip install path to xx.whl #安装该文件注意:此处的安装文件名中的cp38是python3.8版本的意思,故在虚拟环境中安装python版本时也要对应于此
在线安装
python
sudo python3 -m pip install --no-cache https://developer.download.nvidia.cn/compute/redist/jp/v51/pytorch/torch-2.0.0a0+8aa34602.nv23.03-cp38-cp38-linux_aarch64.whl验证是否安装成功
python
conda list torch #查看目标环境是否安装torch
python
python -c "import torch; print(torch.__version__)" #打印torch版本步骤五.安装其他依赖项
python
pip install -r requirements.txt #集群安装步骤六.运行YOLOv12
python
python detect.py #运行脚本最后.可能遇见的问题与解决方法
1.报错torch与torchvision不兼容
解决方法:删掉原版本,安装新版本
相关指令:
python
python -c "import torch; import torchvision; print(f'torch version: {torch.__version__}, torchvision version: {torchvision.__version__}')" #检查当前安装的 torch 和 torchvision 版本
python
pip uninstall torchvision #清理旧版本
rm -rf ~/.cache/pip
rm -rf /home/jetson/.local/lib/python3.8/site-packages/torchvision* #删除可能冲突的缓存文件
conda install torchvision=0.15 -c pytorch #指定安装版本
sudo apt-get install libjpeg-dev libpng-dev #torchvision 需要 libjpeg 和 libpng 库来支持图像处理功能,安装依耐项
#验证torchvision 的 C++ 扩展是否加载成功
import torchvision
print("Torchvision loaded successfully")解决此问题用了一些时间,最后在安装依赖项时,系统自动下载了torch2.3,手动升级了对应的torchvision到1.8,解决了该问题。
2.JetPack SDK官方参考资料
JetPack 是为 NVIDIA Jetson 平台设计的一系列库、API、工具和文档的集合。它简化了开发流程,使开发者能够更容易地构建高性能的人工智能应用。JetPack 包含了用于图像处理、计算机视觉、深度学习等领域的库,比如 VisionWorks, cuDNN, TensorRT 等。此外,它还包含了操作系统镜像、多媒体支持和其他必要的组件
参考链接:JetPack SDK Archive
总结:Jetson是按照Jetpack版本去下载对应的Torch,这一点要和常规的根据CUDA版本去下载对应Torch有一定区别,需要注意。
#笔者也是新手,欢迎各位读者批评指正,更多参考:YOLOv12环境配置,手把手教你使用YOLOv12训练自己的数据集和推理(附YOLOv12网络结构图),全文最详细教程