编辑:LL
12N60-ASEMI无人机专用功率器件12N60
型号:12N60
品牌:ASEMI
封装:TO-220F
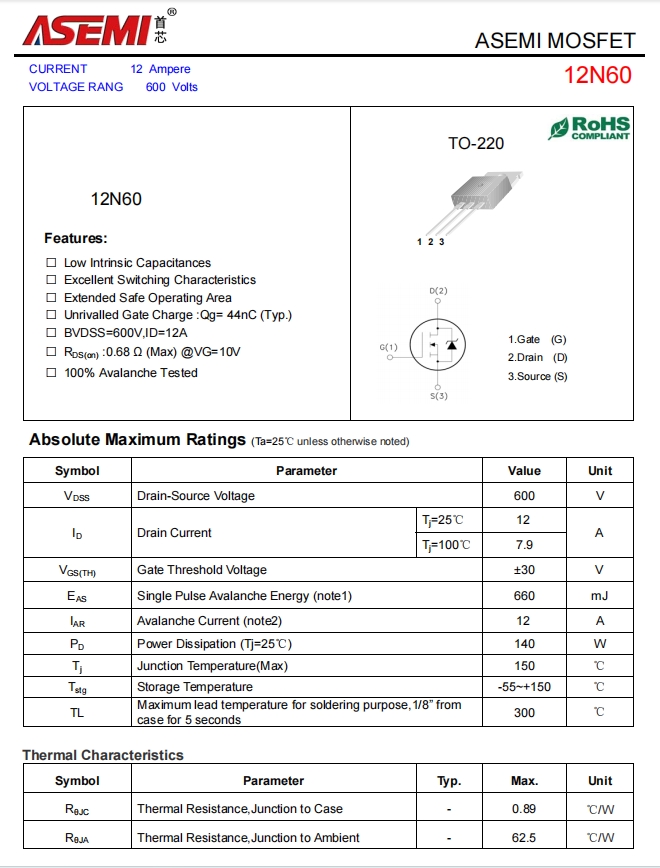
最大漏源电流:12A
漏源击穿电压:600V
批号:最新
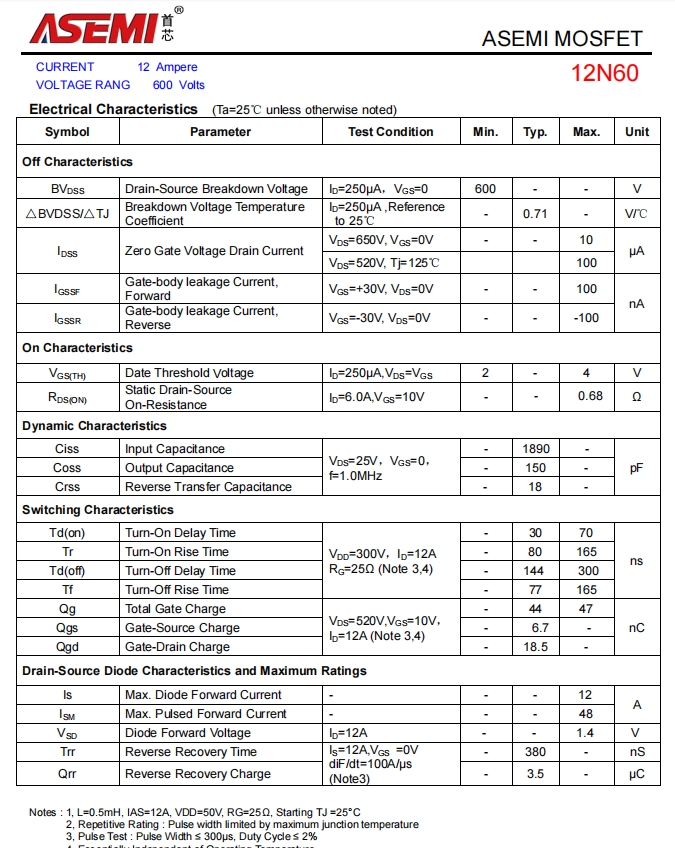
RDS(ON)Max:0.68Ω
引脚数量:3
沟道类型:N沟道MOS管
封装尺寸:如图
特性:MOS管、N沟道MOS管
工作结温:-55℃~150℃
高耐压与电流承载能力
漏源电压(VDS)达600V,漏极电流(ID)连续12A,脉冲电流可达48A,满足高压场景下的稳定运行需求。
部分型号(如AOT12N60FD-VB)击穿电压提升至650V,扩展了极端工况下的安全裕量。
低导通电阻与高效能
导通电阻(RDS(on))最低仅0.53Ω(KIA12N60H),显著降低导通损耗;其他型号如ASEMI 12N60为0.7Ω,平衡了成本与性能。
低栅极电荷(典型值52nC)和快速开关特性(上升/下降时间90ns),支持高频开关应用,提升整体效率。
可靠性与环境适应性
雪崩能量高达865mJ,耐受电压瞬态冲击;工作温度范围覆盖-55℃至+150℃,适应严苛环境。
二、典型应用场景
电源与储能设备
用于开关电源、UPS和储能电源,优化电能转换效率。
在LED驱动中实现高精度调光控制,降低能耗。
新能源与工业控制
适配太阳能/风能逆变器模块,支持中功率电能变换。
工业自动化系统中的电机驱动和电源开关,保障设备稳定运行。
消费与交通电子
电动工具(如电钻、切割机)的电机控制模块,提升响应速度和耐用性。
电动汽车充电桩的电源管理单元,确保高效、安全充电。