道通EVO MAX系列无人机-支持二次开发

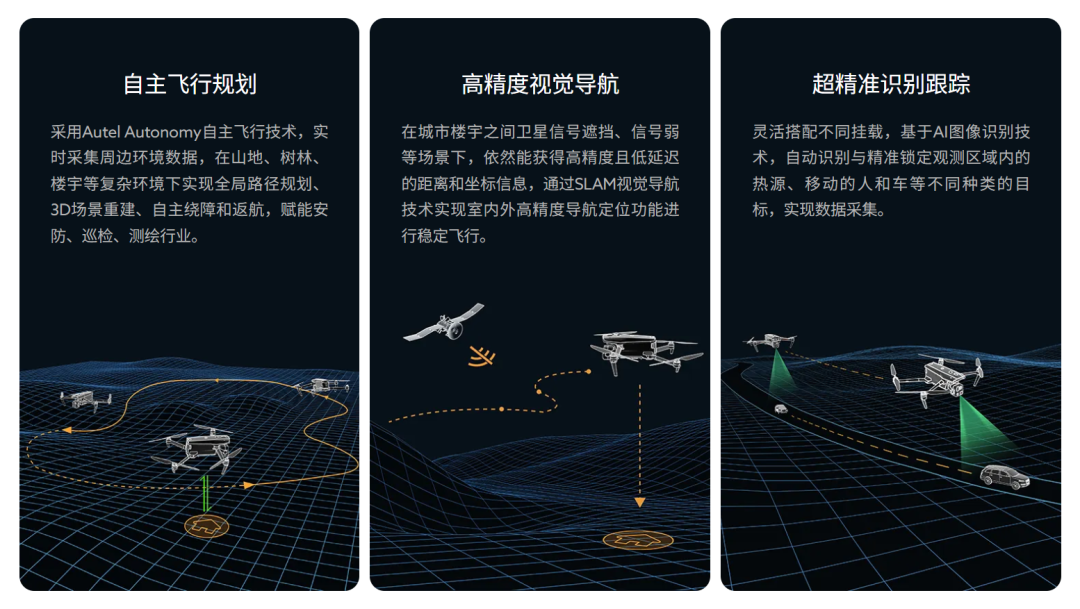
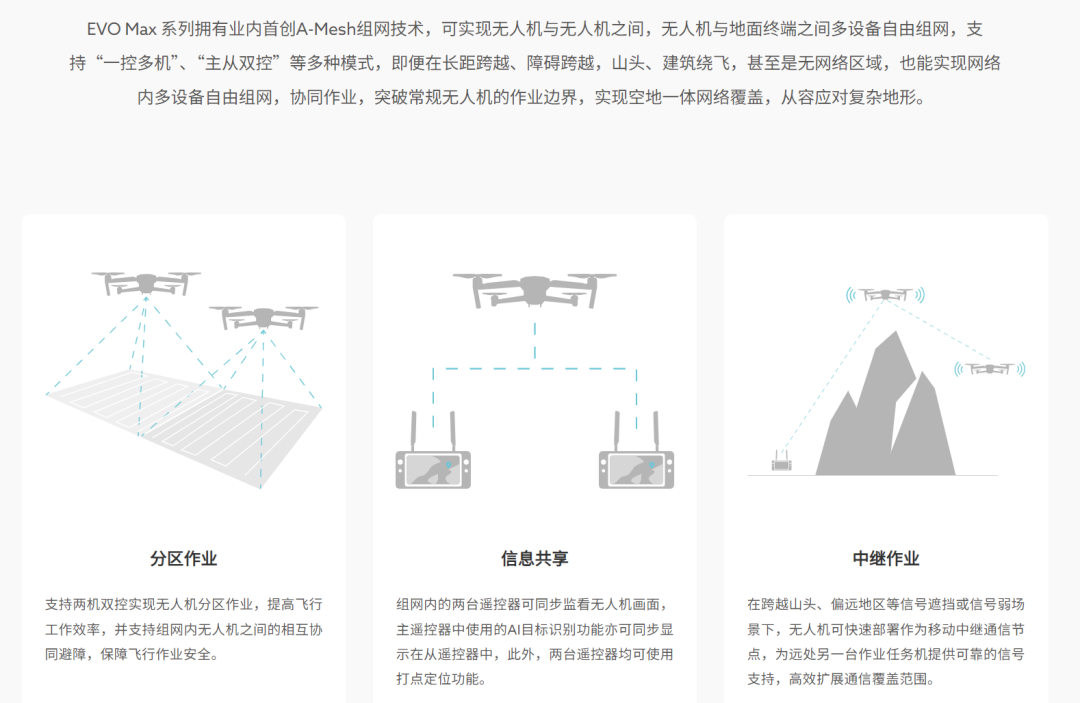
EVO Max 系列采用Autel Autonomy自主飞行技术,实现复杂环境下的全局路径规划、3D场景重建、自主绕障和返航;高精度视觉导航能力,使其在信号干扰强、信号遮挡、信号弱等复杂环境下,依然获得高精度、低延迟的导航定位进行稳定可靠飞行;业内首创A-Mesh组网技术,支持多设备自由组网,实现空地一体网络覆盖;"双目鱼眼视觉+毫米波雷达"的多源传感器融合感知技术,具备720°全方位感知和避障能力;EVO Max 系列配备融光相机4T、融光相机4T XE和融光相机4N,集成变焦相机、超星光级夜视相机、超感光广角相机、红外相机和激光测距仪,高效赋能公共安全、能源巡检、应急管理等领域,树立行业应用无人机新标杆。