CVPR 2021
单目纯视觉BEV检测模型
paper:https://arxiv.org/pdf/2103.01100
code:https://github.com/TRAILab/CaDDN
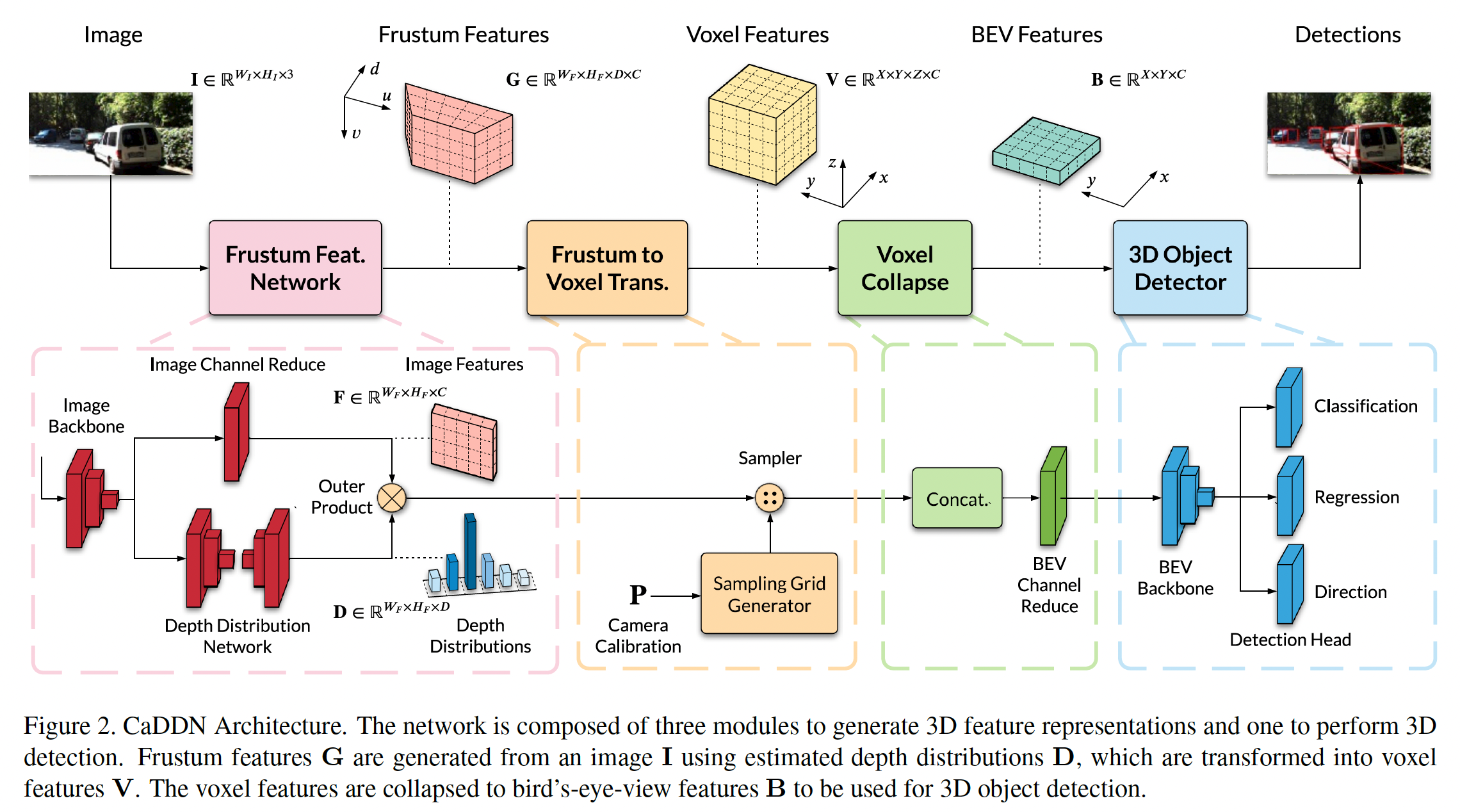
- 视椎特征网络(和LSS做法一致,对深度有监督学习)
- DNN模块,抽图像特征
- 输入:

- 输出:
 ,D:深度桶的数量,C:特征通道数
,D:深度桶的数量,C:特征通道数
- 输入:
- 深度特征模块
- 输入:图像特征
- 输出:
 ,对每个像素生成一个深度分布,再softmax后作为分桶结果
,对每个像素生成一个深度分布,再softmax后作为分桶结果 - 分桶方式:每个桶大小线性增加 linear-increasing discretization(LID)
 di:索引号
di:索引号
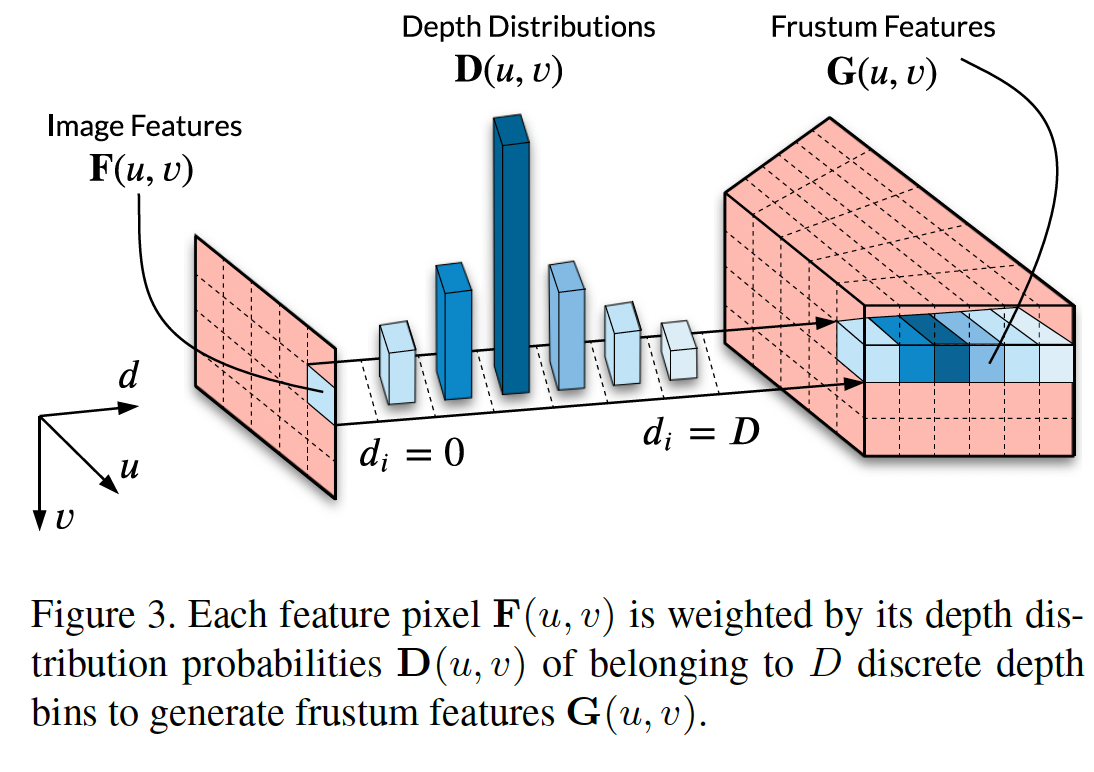
- 点乘融合

- 输入:图像特征(reduce降通道后),深度分布
- 输出:视椎特征G
- DNN模块,抽图像特征
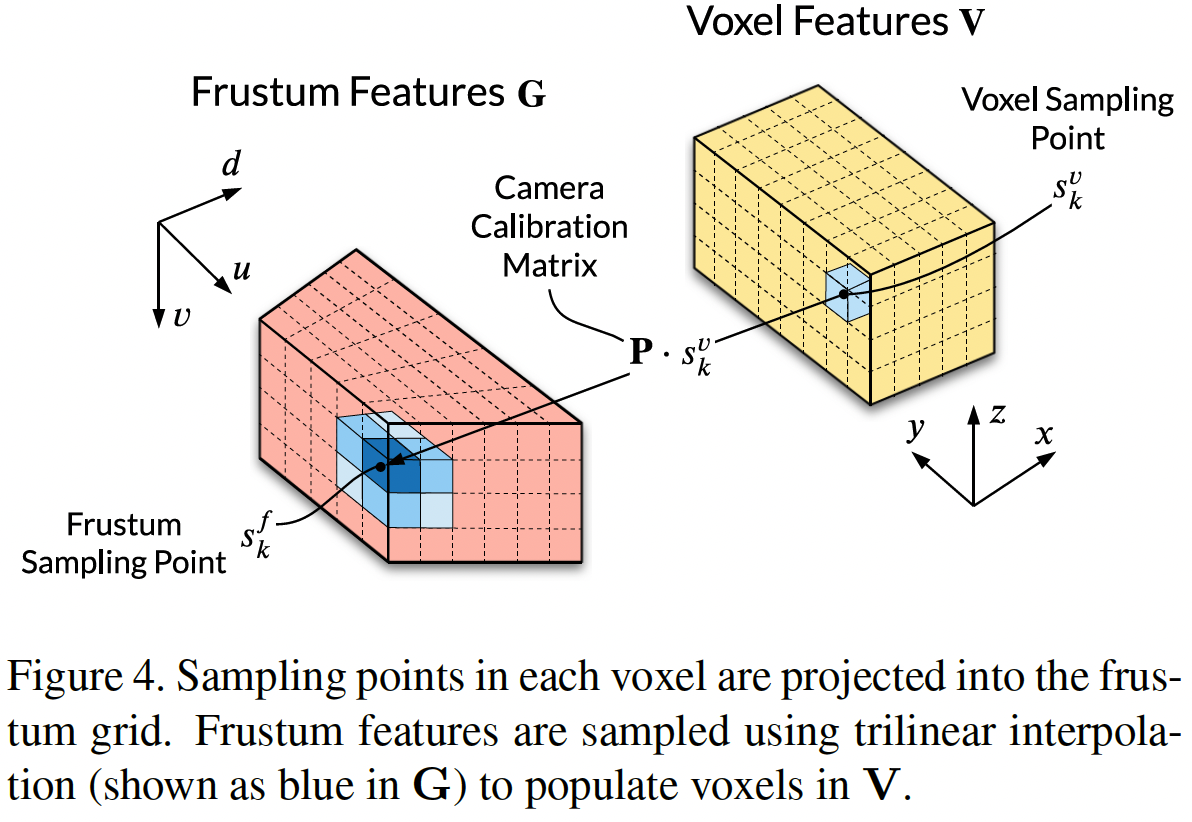
- 视椎特征转voxel特征(和LSS做法一致)
- 输入:,视椎采样点
 ,相机参数
,相机参数
- 输出:

- 做法:
- 视椎采样点用相机参数转到voxel索引
- 用上一阶段网络输出的深度(桶索引),去视椎特征G中抽取voxel特征V,在G对应位置周围用trilinear采样
- 输入:
- voxel特征转bev特征
- 输入:
- 输出:

- 做法:直接reshape
- 输入:
- DNN detector+head
- 采用PointPillars模块结构
- loss:
- 深度监督:

- focal loss,前背景像素α:3.25/0.25
- 整体模型:

- dir:回归框朝向
 0.2
0.2
- 深度监督:
其他附图:
感觉paper风格偏工程