无人机桥梁3D建模的拍摄频率

无人机桥梁3D建模的拍摄频率(每秒拍摄照片数)需根据建模精度、飞行速度、相机性能等因素综合确定。以下是专业级作业的详细参数分析:
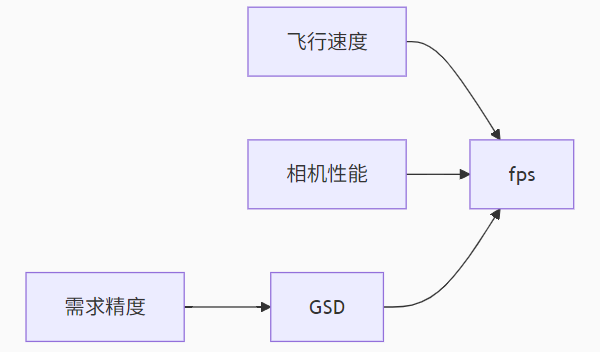
1. 核心计算公式
拍摄频率(fps)= \frac{飞行速度(m/s) × (1 - 航向重叠率)}{GSD(m/像素) × 传感器高度方向像素数}
关键参数关系:
-
飞行速度↑ → 需提高fps
-
航向重叠率↑ → 需提高fps
-
GSD要求↓(精度高)→ 需提高fps
2. 典型场景参数
(1)工程级建模(GSD=1cm)
| 无人机型号 | 飞行速度 (m/s) | 航向重叠率 | 推荐fps | 单公里照片量 |
|---|---|---|---|---|
| 大疆M300 RTK+P1 | 5 | 80% | 0.5 | 1,000-1,500 |
| 极飞V40 | 8 | 70% | 0.8 | 1,200-1,800 |
(2)检测级建模(GSD=3mm)
| 无人机型号 | 飞行速度 (m/s) | 航向重叠率 | 推荐fps | 单公里照片量 |
|---|---|---|---|---|
| 大疆M350+L2 | 3 | 85% | 2 | 3,000-5,000 |
3. 相机性能限制
-
机械快门:
-
最高约1/2000s(如索尼ILX-LR1)
-
理论极限5fps(实际建议≤2fps防畸变)
-
-
全局快门:
-
最高50fps(如PhaseOne iXM)
-
实际建模常用5-10fps
-
动态模糊控制公式:
最大飞行速度 = \frac{GSD × 像元尺寸}{曝光时间}
(例如:GSD=5mm,像元3.76μm,曝光1/1000s → 最大速度≈1.3m/s)
4. 最佳实践建议
-
常规桥梁建模:
-
采用0.5-1fps(飞行速度4-6m/s)
-
示例:大疆P1相机设置1fps,航高30m,80%重叠率
-
-
高精度检测:
-
采用2-3fps(飞行速度2-3m/s)
-
示例:ILX-LR1设置2fps,航高15m,85%重叠率
-
-
特殊结构补拍:
- 斜拉索/支座等局部区域可提升至5fps(悬停或0.5m/s贴飞)
5. 技术趋势
-
全局快门普及:如大疆新一代L2激光雷达相机支持10fps无损拍摄
-
AI动态调节:根据桥梁结构复杂度自动调整fps(如遇索塔自动升频)
-
计算摄影:多帧合成技术降低对高fps的依赖
总结
-
主流范围:0.5-3fps(90%桥梁项目适用)
-
关键选择依据:
-
设备参考:
-
普通建模:1fps(大疆P1)
-
毫米级检测:2fps(索尼ILX-LR1)
-
科研级:5fps+(PhaseOne iXM)
-
实际作业前建议进行20米试验段测试,通过ContextCapture等软件验证模型拼接效果后再确定最终参数。