本文介绍了大陆ARS548毫米波雷达的调试与测试流程,主要包括以下内容:
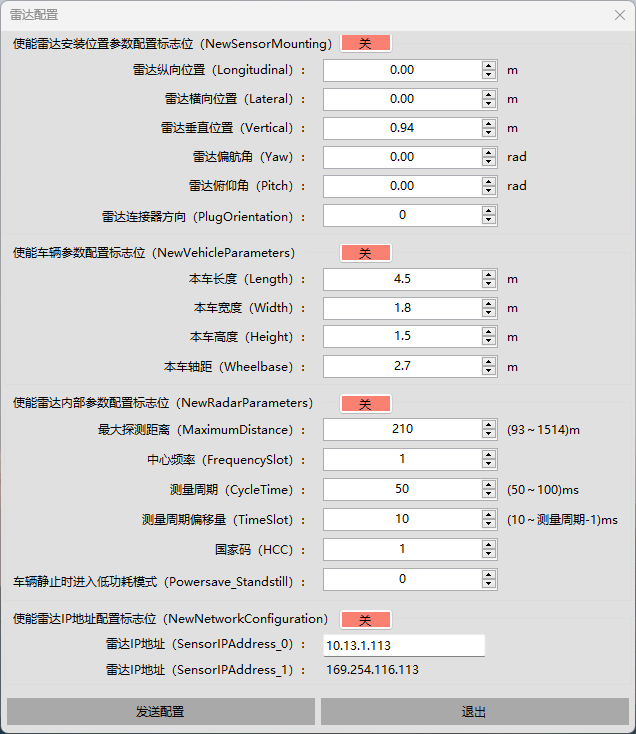
设备参数:最大检测距离301m(可调93-1514m),支持gPTP时间同步。
接线调试:
Windows需使用USB-RJ45转换器 Linux可直接连接网线 上位机测试:需注意Windows Intel网卡不兼容点云数据显示。
Wireshark配置:
需加载对应固件版本的Lua插件 当前实验室使用5.48.4版本 VLAN配置:
提供临时和永久两种修改方式 需将VLAN ID设为19以接收组播数据 时间同步:
使用linuxptp工具实现gPTP同步 需配置主从时钟关系 ROS集成:
需将解析包放入ROS工作空间编译 运行前需确保网络配置正确 文末提供了详细的操作命令和配置示例,并强调测试过程中的注意事项。
1、大陆ARS548手册
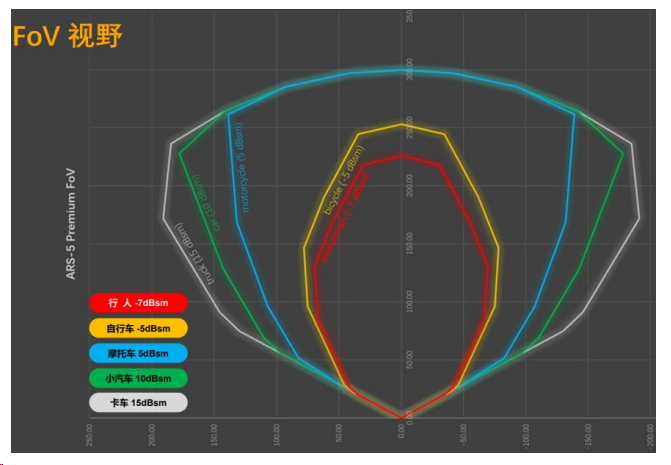
输出点云数

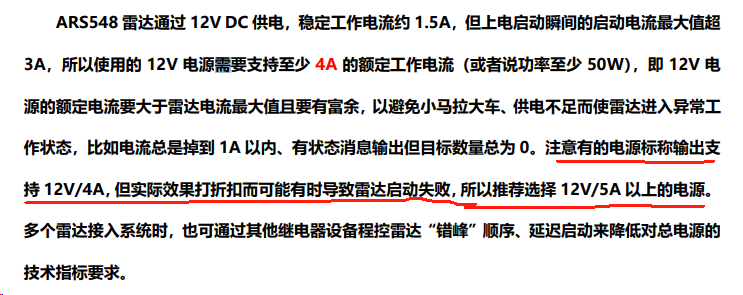
电源:
最大检测距离: 301m 93~1514m可调
时间同步:gPTP
2. 接线调试
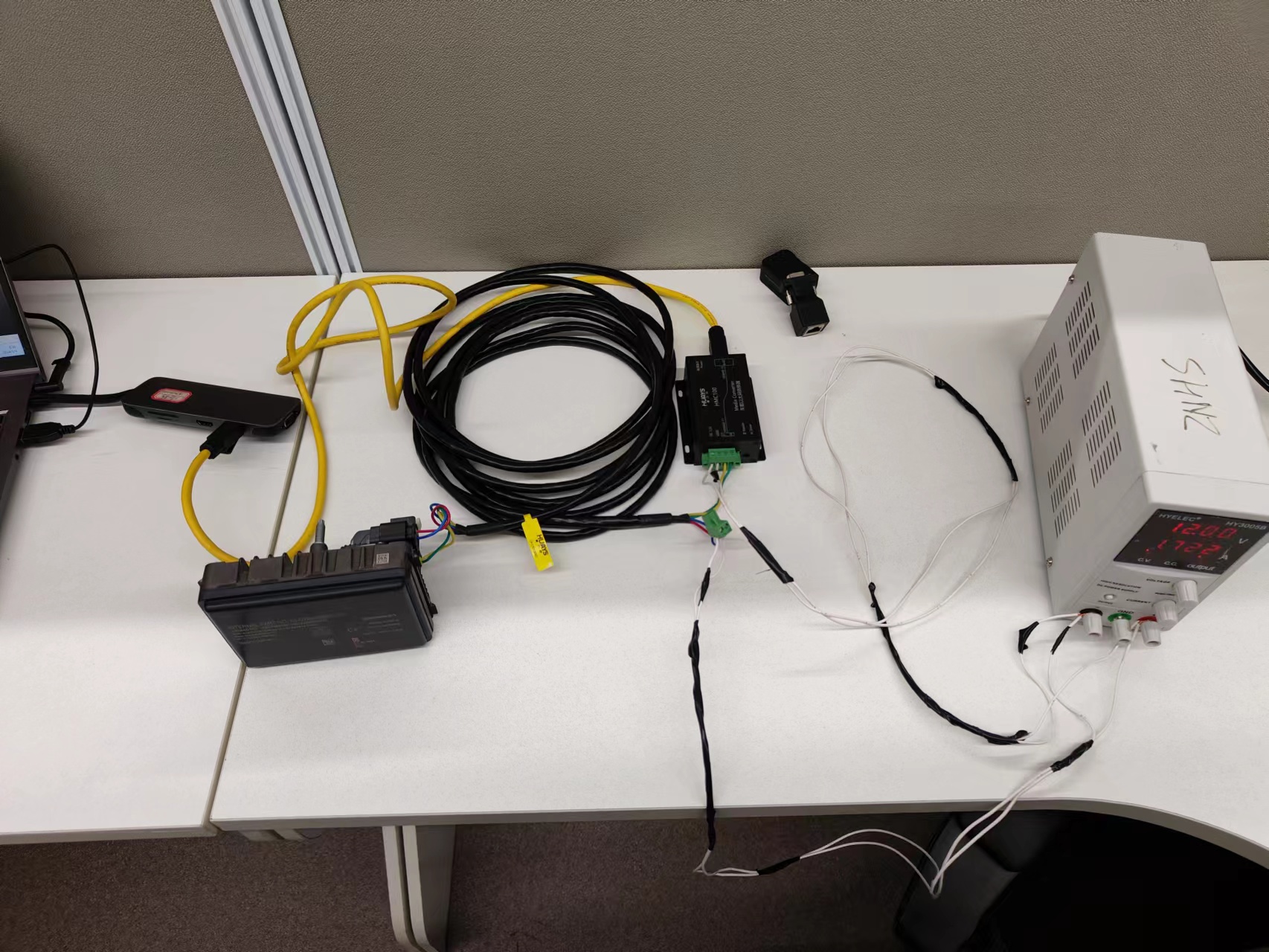
windows - 需要加一个Hub
Linux - 直接连网线就行
根据测试的实际结果,建议Windows 下测试时 加一个 RJ45 - USB的 hub 修改 hub 上的网卡 , linux 直接连接电脑修改eno1的网卡就行。
注:windows下 intel的网卡不支持点云数据的查看,需要使用绿联的以太转USB的hub,接到电脑上,设置相应的 VLAN ID 和 IP,防火墙可以不禁用。
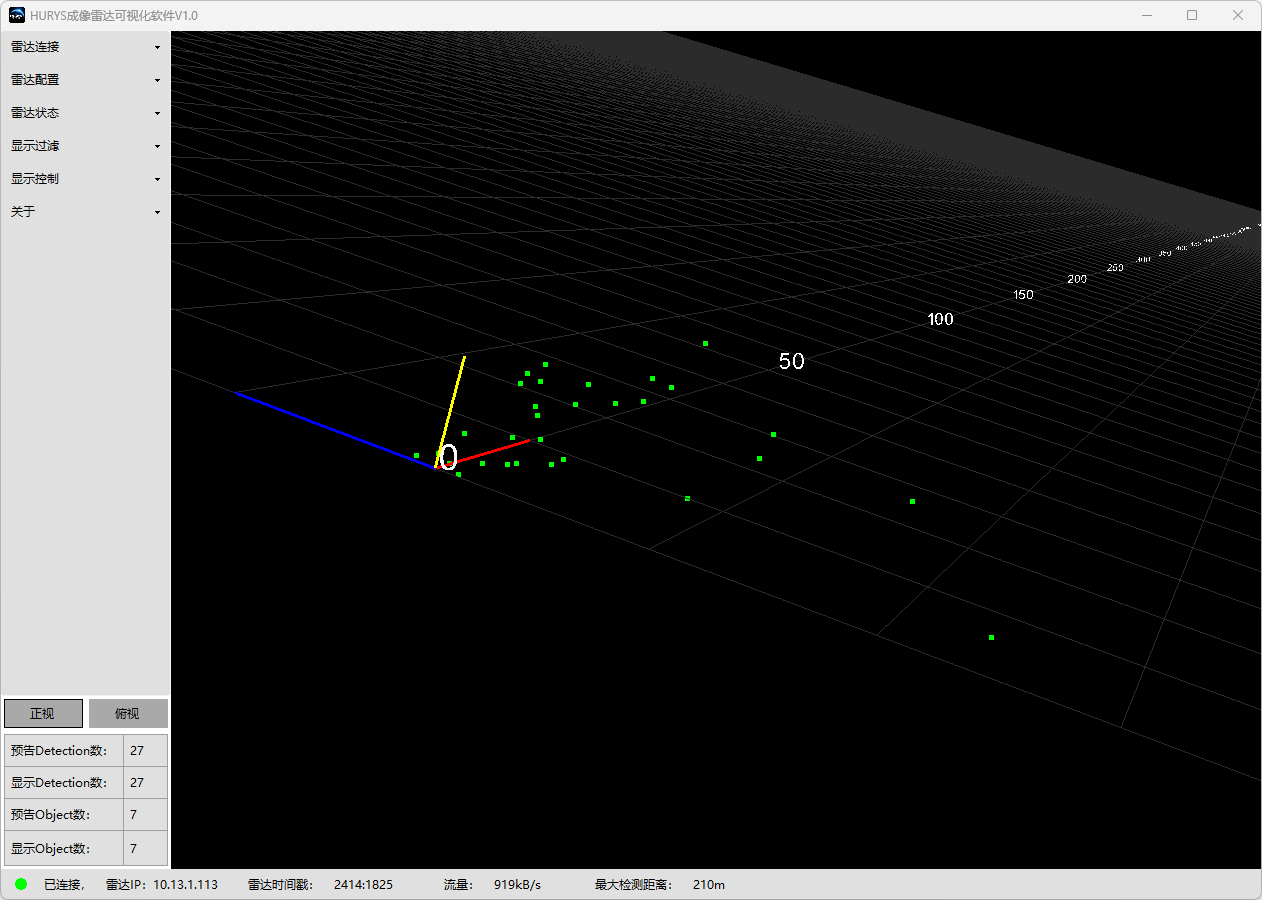
3. 上位机软件测试
2
4. Wireshark加载lua插件
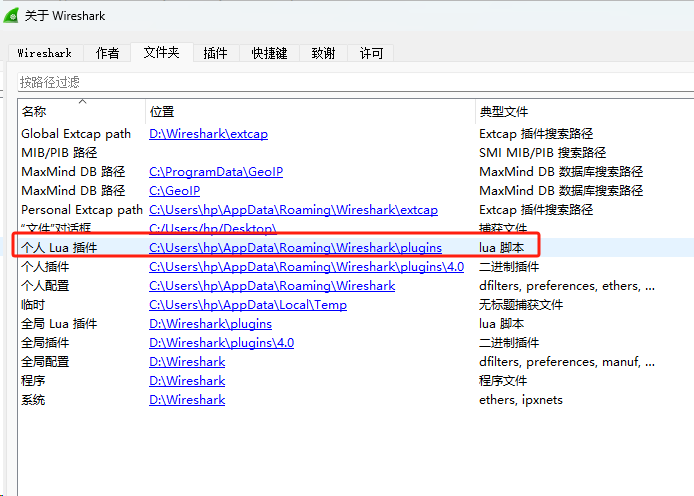
不同固件版本的雷达,需要加载不同固件对应的 lua 脚本;
帮助 >> 关于wireshark >> 文件夹 >> lua插件文件夹加载 >> 重启wireshark
实验室 目前 ARS548的毫米波雷达 需要加载 《5.ARS548_v5.48.4_20221214》 lua
加载后
5. 设备VLAN ID 19 修改
设备:ubuntu系统
(1) 设备 VLAN ID 19修改
由于ARS548雷达本身是组播模式传输数据,提供的上位机软件没有单播模式可修改。
因此,需要将电脑本身的IP添加到组播组中,修改VLAN ID为19.
提供了两种修改方式,建议采用第二种方式修改。
方式1 - 临时修改:
在 Ubuntu 系统下,可以使用 ip 命令来配置以太网卡的 VLAN。以下是配置以太网卡 VLAN ID 为
19 的步骤:
确认网络接口名称: 打开终端并运行以下命令,找到你要配置的网络接口的名称。
ip link

- 添加 VLAN: 使用以下命令将 VLAN 19 添加到你的以太网接口, 以太网接口名称为eno1 :
sudo ip link add link eno1 name eno1.19 type vlan id 19
这将创建一个名为 eth0.19 的虚拟接口,并将其与 VLAN 19 关联。
- 启用 VLAN 接口: 使用以下命令启用新创建的 VLAN 接口:
sudo ip link set dev eno1.19 up
up是开启,down是关闭。
- 验证配置: 运行以下命令验证 VLAN 配置:
ip link show
你应该能够看到 eth0 和 eth0.19 这两个接口,其中 eth0.19 是 VLAN 19 的子接口。
这样,以太网卡就配置了 VLAN ID 19。
方式2 - 永久修改:
上述更改在系统重启后将被重置。如果想要使其永久生效,需要将配置信息添加到网络配置文件中。
网络配置文件通常位于: /etc/network/interfaces 或 /etc/netplan/
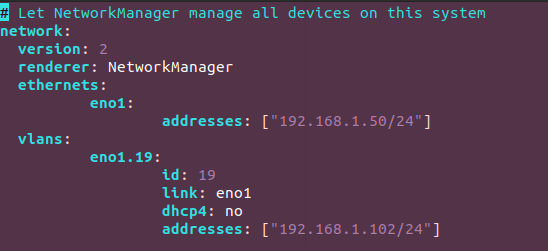
目录下,具体取决于你的系统和网络管理器。如果使 用 Netplan 进行网络配置,可以编辑 Netplan 配置文件,例如 /etc/netplan/01-netcfg.yaml,
修改前需要备份一下:

并在接口的 vlans 部分添加以下内容:
最后执行:
sudo netplan apply
这样配置将在系统重启后保持。
6. 时间同步测试
参考介绍博文:
- https://getiot.tech/zh/linux-command/ Linux命令大全 有 ptp4l + phc2sys的使用介绍
ARS548支持gPTP协议,采用 linuxptp 开源工具进行时间同步,PC机或者域控制器是主时钟,雷达是从时钟;
(1)安装linuxptp工具
linuxptp-4.2.tgz
1
一般直接sudo apt-get install linuxptp就行,但是在使用过程中发现报错:
unknown option BMCA at line 26 in global section
查资料发现,直接apt-get安装,不支持BMCA
2
随后从github上下载 git clone git://git.code.sf.net/p/linuxptp/code linuxptp
执行 sudo make | sudo make install 安装, 依旧报错
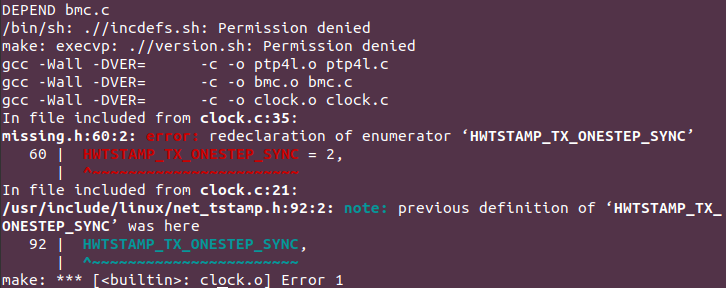
3
更换了一个安装包,
https://sourceforge.net/projects/linuxptp/
执行 cd linuxptp | sudo make | sudo make install 安装
(2) 安装完成之后,修改auto-Master.cfg 配置文件
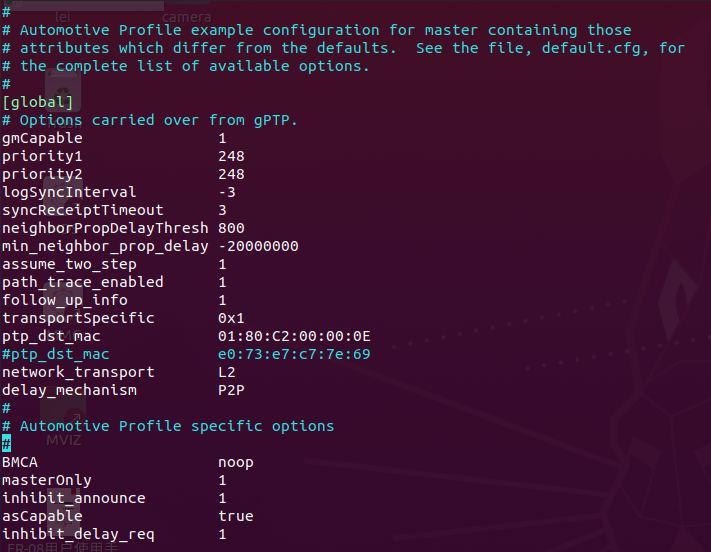
将 ptp_dst_mac 修改为 ARS548 雷达的 mac 地址。
然后 开一个终端 执行:
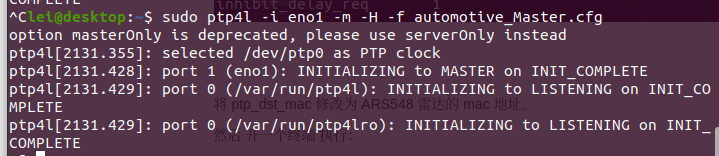
sudo ptp4l -i eno1 -m -H -f automotive_Master.cfg
结果如下:
再开一个终端 执行:
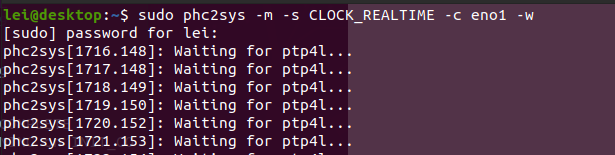
sudo phc2sys -m -s CLOCK_REALTIME -c eno1 -w
结果如下:
然后打开终端执行:
sudo wireshark
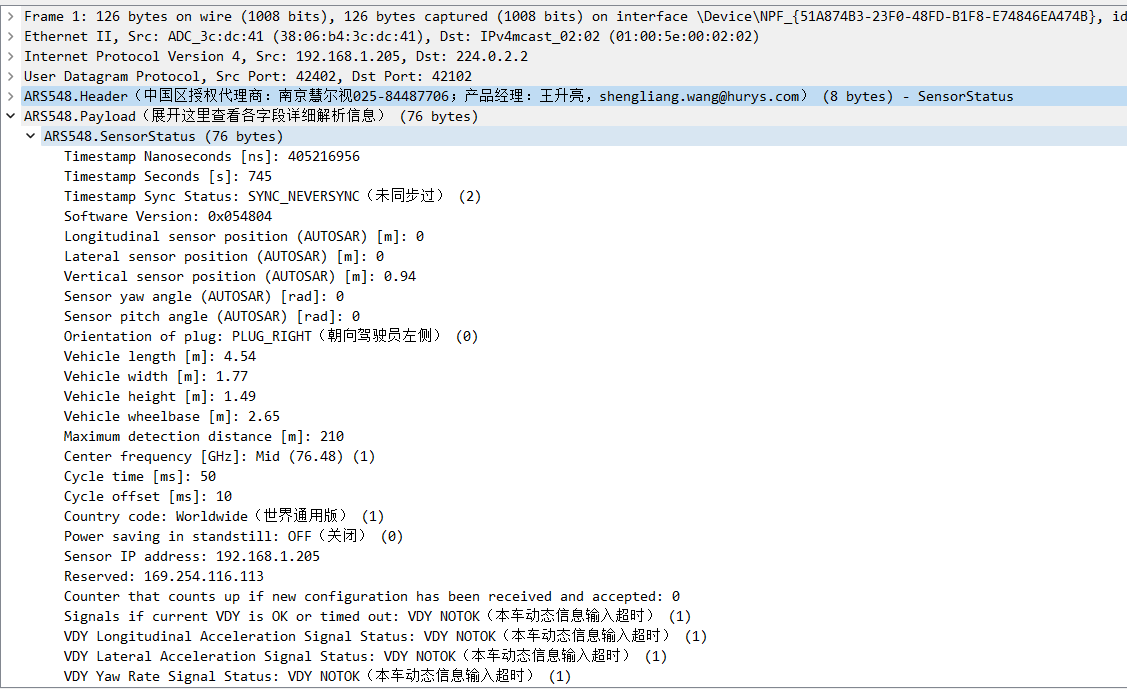
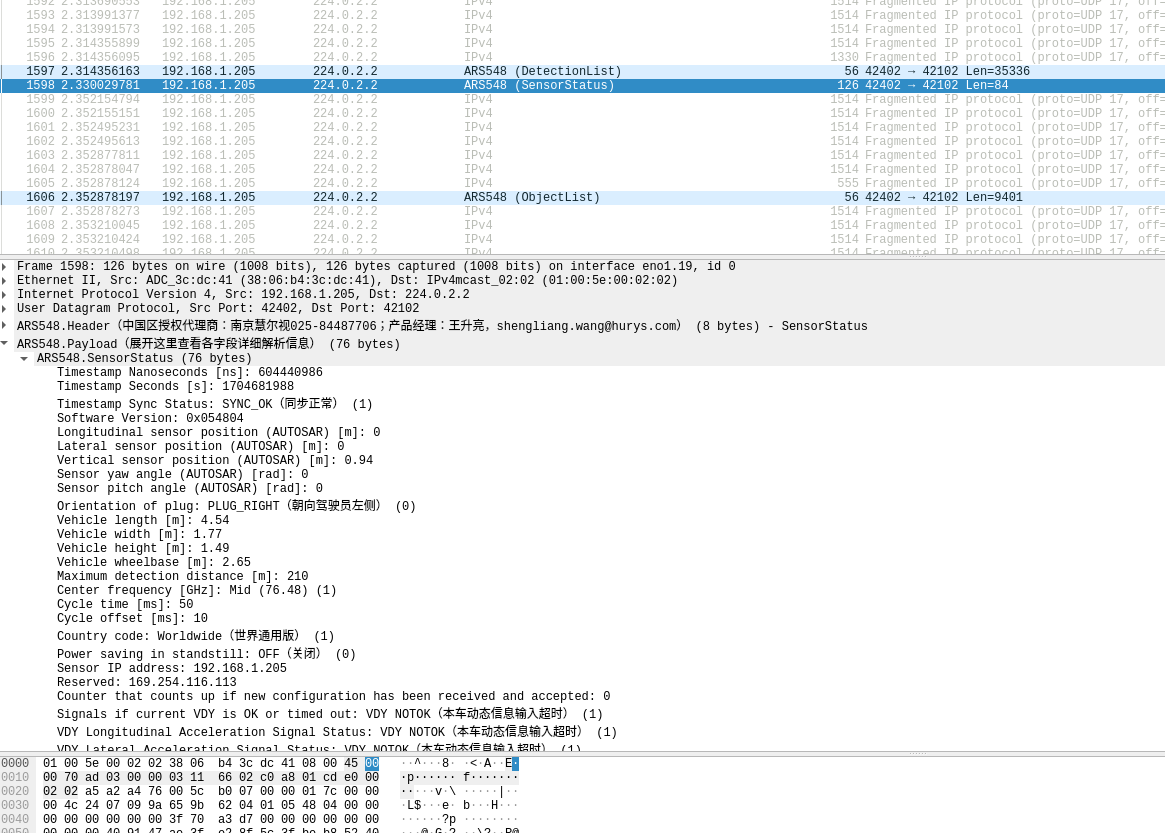
ARS548会以20HZ的速度发数据报文,三种类型,detectionlist、sensorstatus、objectlist。
主要查看其中的sensorsStatus : Sync Status 状态位为1 则表示 时间同步成功,此时同步正常。
注意:
-
测试过程中使用转接盒的话,ARS548发的包,其MAC 地址 是 转接盒的 MAC地址;
-
以上两条核心命令测试执行后,下次还需要再次输入,因此可以将其以服务的方式启动,每次系统自启,作为后台进程;
7. ROS 点云查看
需要将供应商提供的 parse 包放到ROS 的catkin_ws 的src下面
按照如下步骤,编译ros node节点
CATKIN_MAKE:
将parse文件夹拷贝至"${ROS_WORKSPACE}/src/"下
切换至WORKSPACE目录: cd ${ROS_WORKSPACE}
执行命令:catkin_make
若catkin_make忽略了parse项目,执行: catkin_make --only-pkg-with-deps parse
运行DEMO前确认以下步骤:
配置网卡IP与雷达IP在相同网段,配置网卡VLAN ID
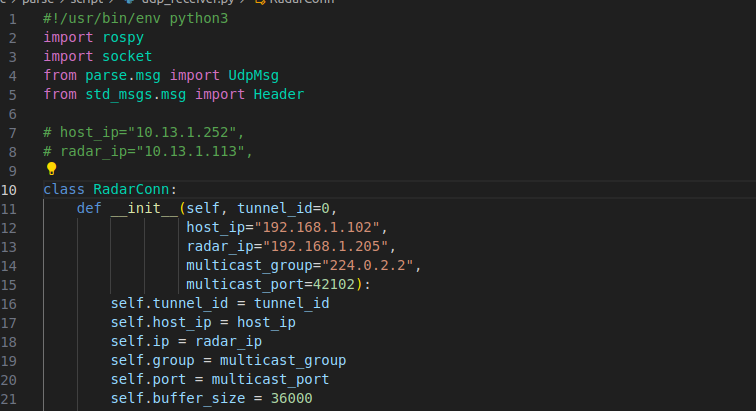
parse/script/udp_receiver.py, line 75 配置host_ip与radar_ip
host_ip : 192.168.1.102
radar_ip : 192.168.1.205
添加python脚本执行权限: chmod +x ${ROS_WORKSPACE}/src/parse/script/*
运行DEMO:
roslaunch parse single_radar_viz.launch
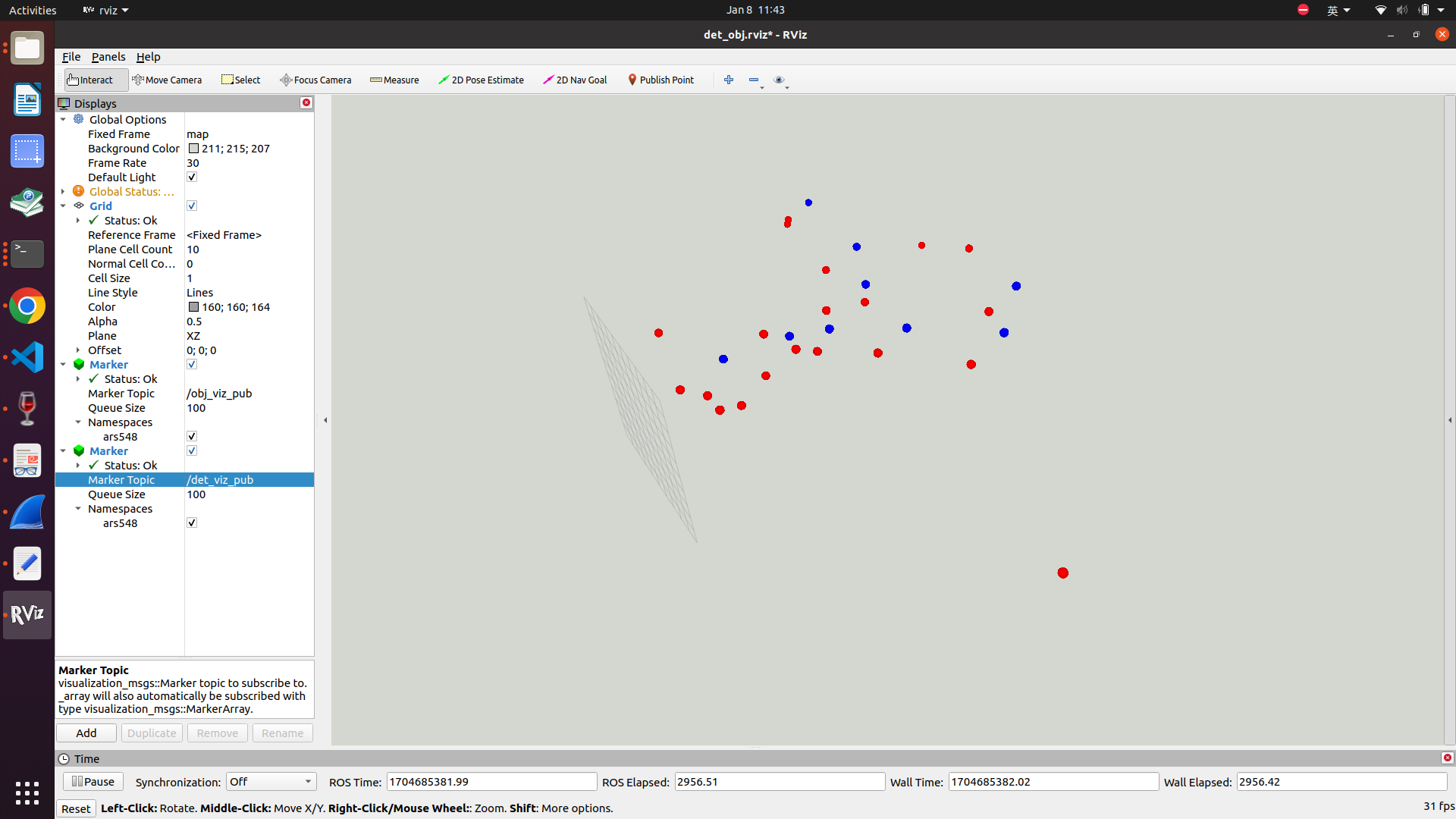
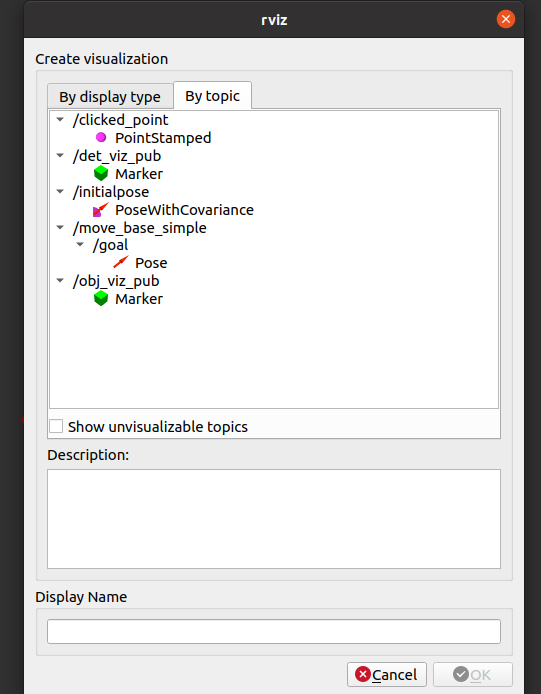
**核心有两种类型的 Topic : ** detection模式: /det_viz_pub | obj_viz_pub
可以选择显示某种类型的数据。
8. ROS点云数据采集
类似菜鸟教程的网站:https://getiot.tech/zh/
1. rosbag 使用说明:
https://blog.csdn.net/QLeelq/article/details/123201294
2. rosbag 播放数据, rviz查看数据
https://blog.csdn.net/qq_42585108/article/details/104853192
- 启动launch文件
roslaunch parse single_radar_viz.launch
- 记录所有的话题数据 (文件名会自动保存为日期)
rosbag record -a
- 播放bag文件
rosbag play xx.bag
- 打开rviz查看数据
rosrun rviz rviz
- 在rviz中订阅相关的topic即可查看
附录
1. VLAN + 组播 (云驰适配问题)
二层交换机和三层交换机的区别: https://zhuanlan.zhihu.com/p/379870366