启动Misson Planner 模拟程序
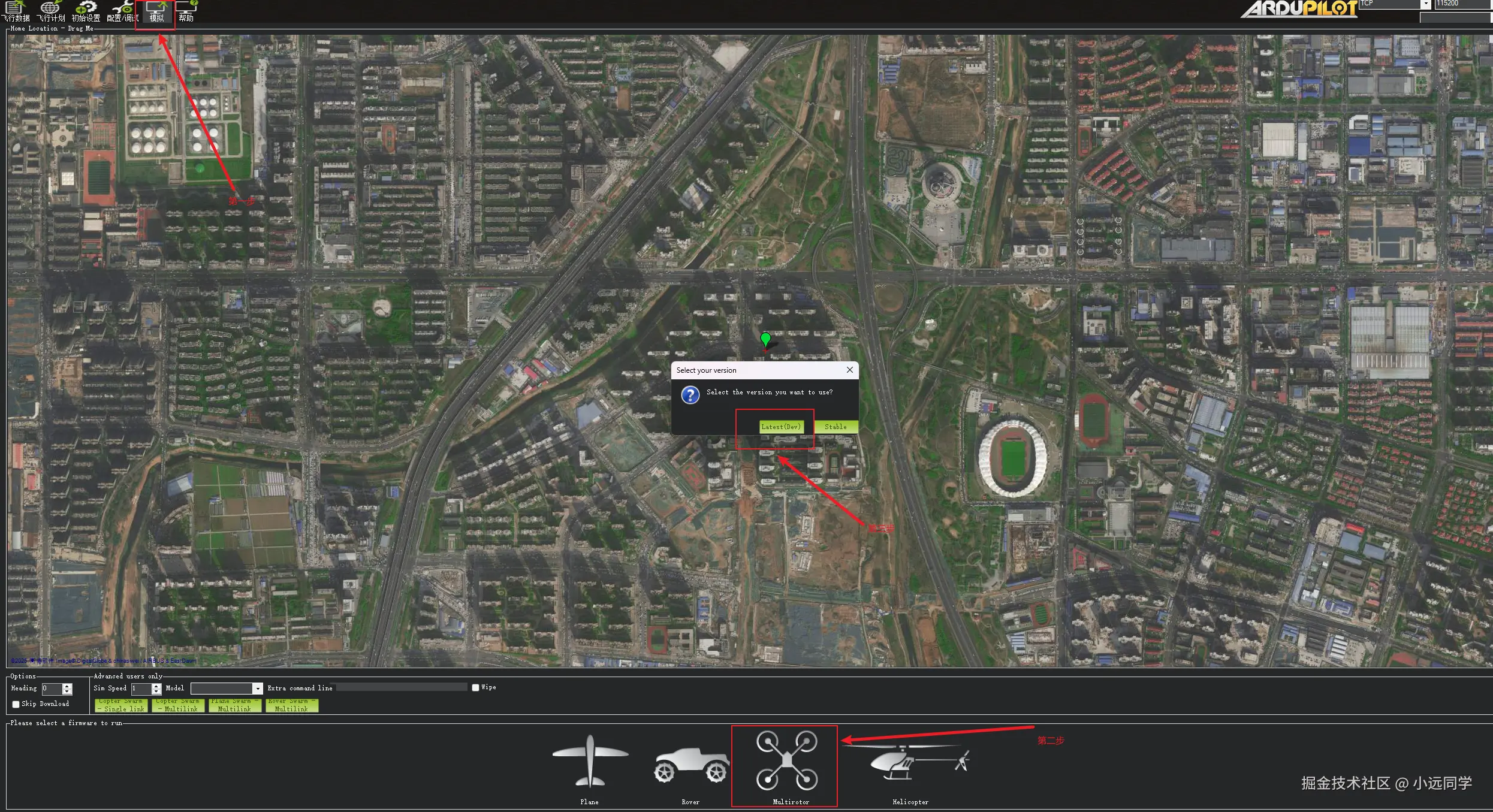
进入软件之后,点击模拟,选择 Multirotor 点击确定即可
启动成功后,软件会自动连接无人机,并出现控制台窗口,显示模拟器所开tcp端口概括 如下图所示,模拟器开启了 5760 5762 5763 三个端口,5760默认为软件所连接

模拟程序启动失败,连接之后,瞬间断开
此原因可能由于虚拟网卡导致,禁用虚拟网卡,再次启动模拟程序即可成功

起飞流程
- 1.设置模式为 自稳模式

- 2.解锁无人机
HUD会显示已解锁,解锁后指定时间内未起飞将会自动锁定

- 3.起飞 起飞成功后,高度和速度会有变化

飞行计划
在飞行计划栏中进行航线的规划
- 1.点击航点 直接在地图上面选择,每多一个航点,面板就会多一个航点信息

- 2.航点命令 1.起飞航点,正常第一个航点必须为起飞航点。 TAKEOFF:此类型航点为从无人机位置起飞,不需要设置经纬度 WAYPOINT: 此类型航点为普通航点需要设置经纬度,飞行高度,速度等信息,,也可以不进行设置,按照无人机默认值飞行

2.最后一个航点,必须时返回航点,设置此航点,无人机会自动返回到起飞时的位置 RETURN_TO_LAUNCH: 此类型航点无需设置经纬度信息

3.简单航线任务需包含该信息

4.写入航点

执行飞行计划
1.解锁无人机

2.设置模式为自动

3.执行 Mission Start 动作

4.就此无人机会按照航线进行飞行,飞行结束会自动回到起飞点