文章目录
引言:DOM更新的"隐形之手"
在现代前端框架的舞台上,Vue.js以其轻量、高效和易用性赢得了无数开发者的青睐。当我们享受着数据驱动视图带来的便捷时,是否曾好奇过,Vue是如何在数据变更时,以最小的代价更新真实DOM,从而保证应用流畅运行的?这背后,Diff算法扮演着至关重要的角色,它就像一位技艺高超的舞台调度,悄无声息地指挥着DOM元素的更新、创建与移除。今天,就让我们一同揭开Vue Diff算法的神秘面纱,探寻其核心实现的奥秘。
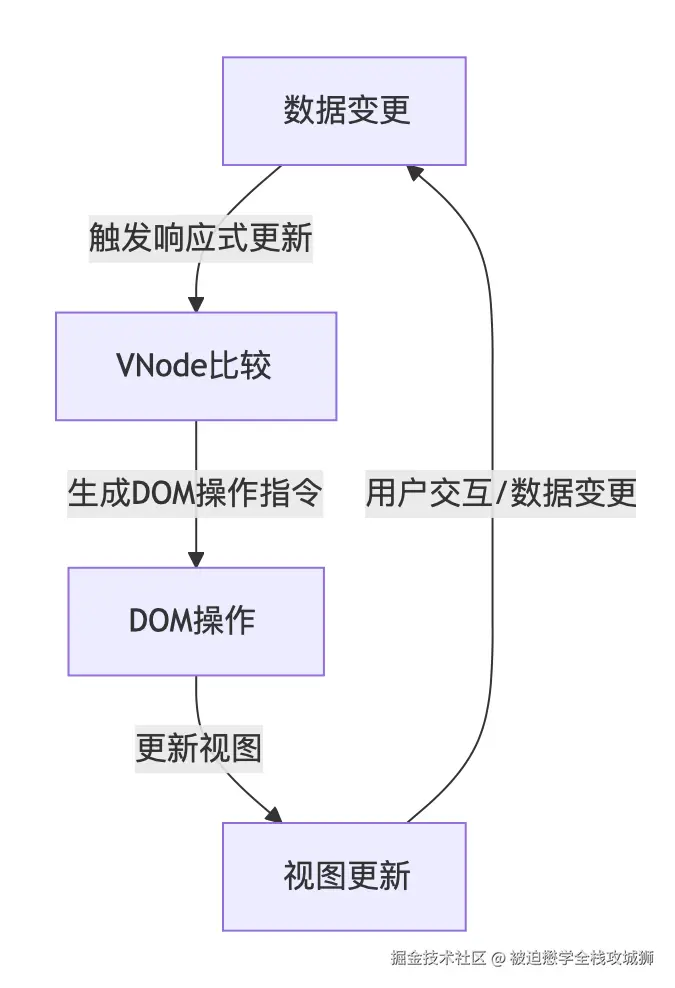
图1: Vue Diff算法工作流程示意
Diff算法:为何如此重要?
想象一下,如果每次数据变动都导致整个页面的重新渲染,那将是一场性能灾难。Diff算法的核心使命,就是在新旧虚拟DOM (VNode) 之间进行比较,找出最小的差异集合,然后只对这些差异部分进行实际的DOM操作。这极大地减少了不必要的浏览器重绘和回流,是前端框架实现高性能渲染的关键技术之一。Vue的Diff算法,尤其在处理列表等动态节点时,展现出了其设计的精妙与高效。
两条路径:Key的有无,命运的分野
在Vue源码中,当涉及到子节点的更新 (patchChildren),一个关键的决策点在于节点是否拥有key属性。这个小小的key,如同给每个VNode一个独特的身份ID,直接决定了Diff算法将采取截然不同的策略。这便是KEYED_FRAGMENT(有Key)和UNKEYED_FRAGMENT(无Key)两条分支的由来。
UNKEYED_FRAGMENT:简单直接的策略
当Vue的patchChildren检测到子节点列表没有使用key时,它会进入UNKEYED_FRAGMENT分支,采用一种相对简单直接的比较方式。这种方式的核心思想是:按位比较,多则增,少则删。
具体来说,patchUnkeyedChildren函数会:
- 计算新旧子节点列表的共同长度 (
commonLength)。 - 遍历这个共同长度的部分,对新旧子节点在相同位置的元素进行
patch操作。这意味着,无论内容是否真的匹配,只要位置相同,就会尝试更新。 - 如果旧子节点列表比新子节点列表长,那么多余的旧节点将被卸载 (
unmountChildren)。 - 反之,如果新子节点列表更长,那么多余的新节点将被挂载 (
mountChildren) 到容器中。
这种策略的优势在于实现简单,但在某些场景下效率不高。例如,如果仅仅是列表中的元素顺序发生了变化,无Key的Diff可能会进行大量的卸载和重新挂载操作,而不是更高效的移动操作。
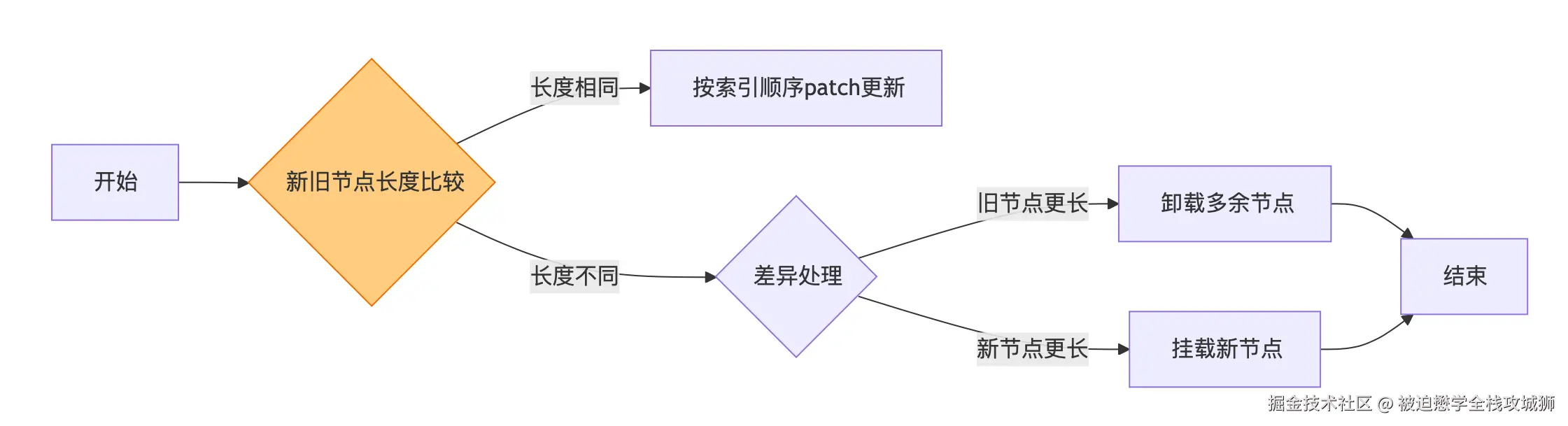
图2: 无Key Diff (UNKEYED_FRAGMENT) 工作方式
以下是patchUnkeyedChildren函数的部分源码片段(来源于Vue源码-02文档):
TypeScript
const patchUnkeyedChildren = (
c1: VNode[], // oldChildren
c2: VNodeArrayChildren, // newChildren
container: RendererElement, // 父容器元素
anchor: RendererNode | null, // 锚点元素,用于插入新节点
parentComponent: ComponentInternalInstance | null, // 父组件实例
parentSuspense: SuspenseBoundary | null, // 父级Suspense边界
isSVG: boolean, // 是否为SVG元素
slotScopeIds: string[] | null, // slot作用域ID数组
optimized: boolean // 是否为优化模式
) => {
c1 = c1 || EMPTY_ARR
c2 = c2 || EMPTY_ARR
const oldLength = c1.length
const newLength = c2.length
const commonLength = Math.min(oldLength, newLength)
let i
// 1. 遍历新旧子节点,对相同位置的元素进行patch操作
for (i = 0; i < commonLength; i++) {
const nextChild = (c2[i] = optimized
? cloneIfMounted(c2[i] as VNode)
: normalizeVNode(c2[i]))
patch(
c1[i],
nextChild,
container,
null,
parentComponent,
parentSuspense,
isSVG,
slotScopeIds,
optimized
)
}
if (oldLength > newLength) {
// 2. 如果旧子节点的长度大于新子节点的长度,则移除多余的旧节点
unmountChildren(
c1,
parentComponent,
parentSuspense,
true,
false,
commonLength
)
} else {
// 3. 如果旧子节点的长度小于新子节点的长度,则挂载新的子节点到容器中
mountChildren(
c2,
container,
anchor,
parentComponent,
parentSuspense,
isSVG,
slotScopeIds,
optimized,
commonLength
)
}
}
KEYED_FRAGMENT:精打细算的智慧
当节点拥有key时,Vue的Diff算法将展现其真正的威力,进入KEYED_FRAGMENT分支,执行patchKeyedChildren函数。key的存在使得Vue能够追踪每个节点的身份,从而在列表项发生变化(如增删、重排)时,尽可能地复用和移动现有元素,而不是粗暴地销毁和重建。
patchKeyedChildren的策略更为复杂和精细,大致可以分为几个核心步骤:
-
从头开始同步 (Sync from start) :
从新旧子节点列表的头部开始,逐个比较。如果节点类型和key都相同 (通过
isSameVNodeType判断),则对它们进行patch,然后指针向后移动。一旦遇到不同的节点,此阶段结束。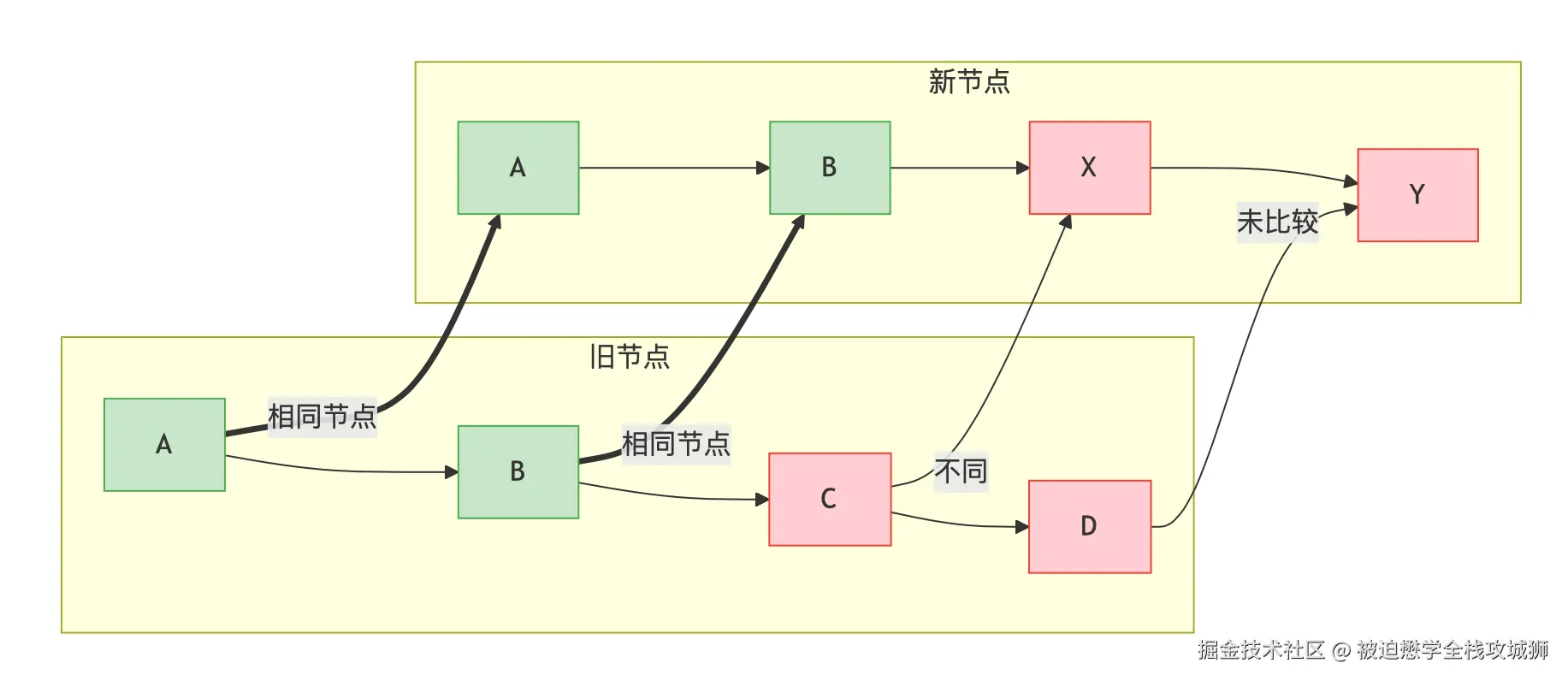
图3: Keyed Diff - 头部同步
-
从尾部开始同步 (Sync from end) :
接着,从新旧子节点列表的尾部开始,反向逐个比较。同样,如果节点类型和key相同,则
patch并移动指针。遇到不同节点则停止。
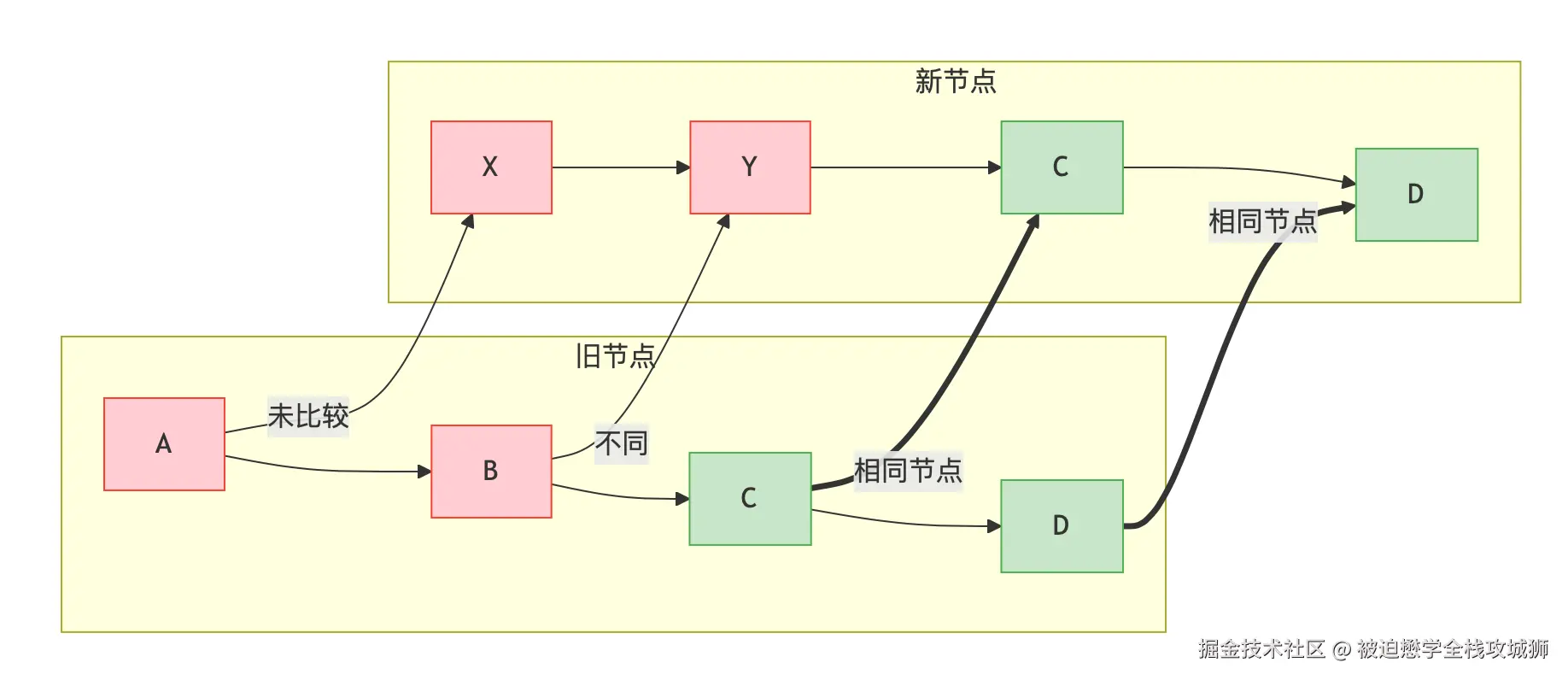
图4: Keyed Diff - 尾部同步
-
处理新增和删除的特殊情况:
- 如果经过头尾同步后,旧子节点列表已遍历完 (
i > e1),但新子节点列表仍有剩余 (i <= e2),则这些剩余的新节点需要被挂载。 - 反之,如果新子节点列表已遍历完 (
i > e2),但旧子节点列表仍有剩余 (i <= e1),则这些剩余的旧节点需要被卸载。
- 如果经过头尾同步后,旧子节点列表已遍历完 (
-
处理中间乱序部分 (Unknown sequence) :
这是最复杂的部分。当头尾同步都结束后,新旧列表的中间部分可能存在乱序、新增或删除的节点。此时:
-
为剩余的新子节点创建一个
key到其在新列表中的索引的映射 (keyToNewIndexMap)。 -
遍历剩余的旧子节点:
- 如果旧节点有
key,尝试在keyToNewIndexMap中查找。如果找到,说明该节点可以复用,对其进行patch,并记录其在新旧列表中的位置关系。 - 如果旧节点没有
key,或通过key未找到匹配的新节点,则尝试查找类型相同的无key新节点进行复用。 - 如果都找不到可复用的新节点,则卸载该旧节点。
- 如果旧节点有
-
根据记录的位置关系和新节点列表,利用最长递增子序列 (Longest Increasing Subsequence, LIS) 算法来最小化节点的移动次数。不在LIS中的节点需要被移动到正确的位置,而新节点中没有对应旧节点的部分则需要被挂载。
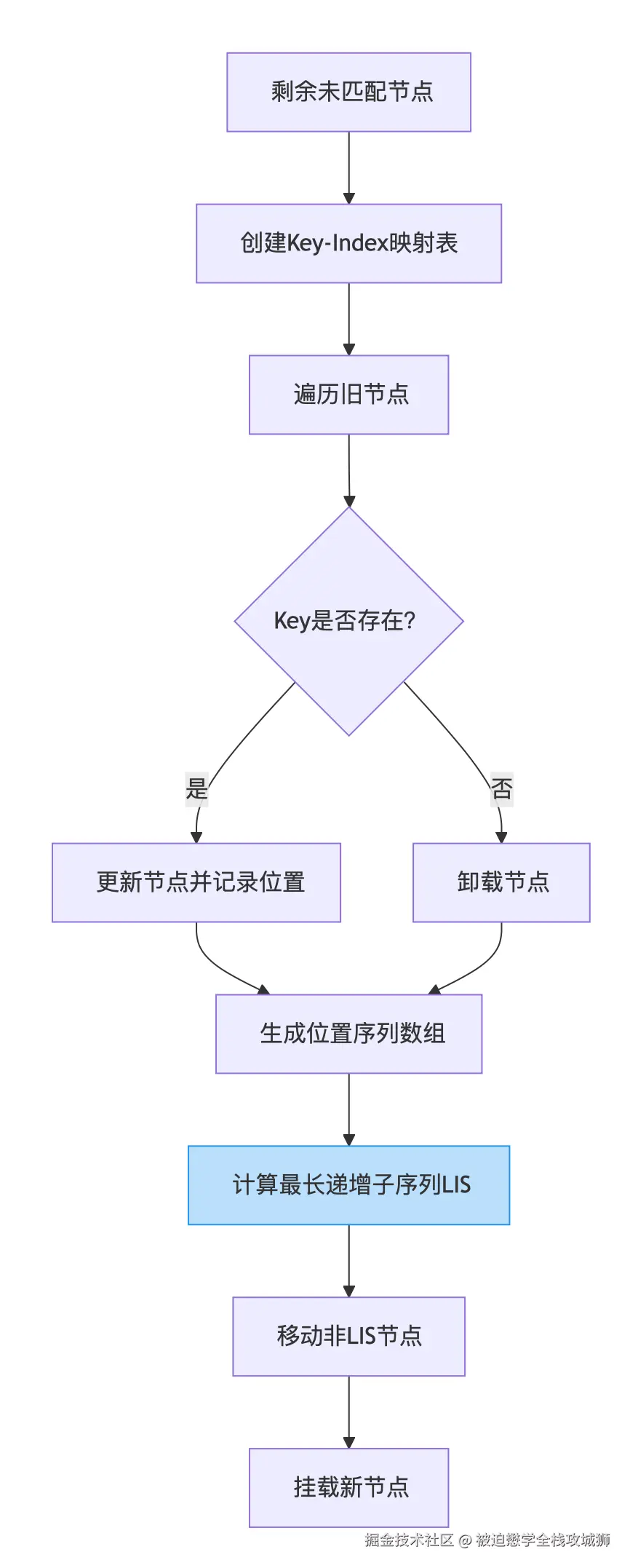
-
图5: Keyed Diff - 中间乱序处理与LIS优化
patchKeyedChildren的部分源码片段(来源于Vue源码-02文档):
TypeScript
// 伪代码展示核心逻辑阶段
const patchKeyedChildren = (c1, c2, container, ...) => {
let i = 0;
const l2 = c2.length;
let e1 = c1.length - 1; // prev ending index
let e2 = l2 - 1; // next ending index
// 1. 从头开始同步
while (i <= e1 && i <= e2) {
const n1 = c1[i];
const n2 = (c2[i] = optimized ? cloneIfMounted(c2[i]) : normalizeVNode(c2[i]));
if (isSameVNodeType(n1, n2)) {
patch(n1, n2, container, ...);
} else {
break;
}
i++;
}
// 2. 从尾部开始同步
while (i <= e1 && i <= e2) {
const n1 = c1[e1];
const n2 = (c2[e2] = optimized ? cloneIfMounted(c2[e2]) : normalizeVNode(c2[e2]));
if (isSameVNodeType(n1, n2)) {
patch(n1, n2, container, ...);
} else {
break;
}
e1--;
e2--;
}
// 3. 新增: 旧节点已遍历完,新节点有剩余
if (i > e1) {
if (i <= e2) {
// mount new
while (i <= e2) {
patch(null, (c2[i] = ...), container, anchor, ...);
i++;
}
}
}
// 4. 删除: 新节点已遍历完,旧节点有剩余
else if (i > e2) {
while (i <= e1) {
unmount(c1[i], ...);
i++;
}
}
// 5. 中间乱序部分
else {
const s1 = i; // prev starting index
const s2 = i; // next starting index
const keyToNewIndexMap = new Map();
for (i = s2; i <= e2; i++) {
// ... build keyToNewIndexMap ...
}
let patched = 0;
const toBePatched = e2 - s2 + 1;
let moved = false;
let maxNewIndexSoFar = 0;
const newIndexToOldIndexMap = new Array(toBePatched).fill(0);
for (i = s1; i <= e1; i++) {
const prevChild = c1[i];
// ... try to find prevChild in new children, patch or unmount ...
// ... update newIndexToOldIndexMap, moved, maxNewIndexSoFar ...
}
const increasingNewIndexSequence = moved ? getSequence(newIndexToOldIndexMap) : EMPTY_ARR;
let j = increasingNewIndexSequence.length - 1;
for (i = toBePatched - 1; i >= 0; i--) {
// ... move or mount nodes based on LIS ...
}
}
}
资料来源:本文中所有源码片段及核心原理解析均基于提供的 "Vue源码-02" 文档。
守门员:isSameVNodeType的职责
在Diff的过程中,无论是patchUnkeyedChildren还是patchKeyedChildren,我们都频繁看到一个关键的判断函数:isSameVNodeType。这个函数是Diff算法决定是否可以对两个节点进行patch(即就地更新)而不是销毁旧节点、创建新节点的"守门员"。
它的判断逻辑很简单却至关重要:只有当两个虚拟节点的type(类型,如 'div', 'span', 或组件构造函数)相同,并且它们的key属性也相同时(如果都有key的话),它们才被认为是相同类型的VNode。
TypeScript
export function isSameVNodeType(n1: VNode, n2: VNode): boolean {
// HMR (Hot Module Replacement) 相关的特殊处理,在生产环境中通常不执行
if (
__DEV__ &&
n2.shapeFlag & ShapeFlags.COMPONENT &&
hmrDirtyComponents.has(n2.type as ConcreteComponent)
) {
return false
}
return n1.type === n2.type && n1.key === n2.key
}
这个简单的判断,确保了Diff算法不会尝试去更新一个<div>到一个<p>,或者一个有特定key的列表项到另一个不同key的列表项,从而保证了更新的合理性和高效性。
性能的飞跃:Diff如何施展魔法?
Vue的Diff算法之所以高效,并非单一因素作用的结果,而是多种优化策略协同工作的成果:
- Key的妙用 :如前所述,
key是实现高效节点复用和移动的核心。它赋予了节点稳定的身份,使得Vue能够智能地识别哪些节点是"老朋友",哪些是"新面孔",哪些只是"换了个位置"。 - 头尾双端比较 :在
patchKeyedChildren中,首先进行的头尾同步操作,能够快速处理列表两端未发生变化或简单增删的场景,避免了对整个列表进行复杂比较的开销。 - 最长递增子序列 (LIS) :在处理中间乱序节点时,通过计算LIS,Vue能够找出那些相对位置保持不变的节点序列。这些节点不需要移动,只需要对其他节点进行最少次数的移动操作,就能达到最终的顺序。这大大减少了DOM的实际移动操作,是性能优化的一个重要环节。
- 只比较同层级节点:Vue的Diff算法是同层级比较,不会跨层级移动节点。这简化了算法复杂度,也符合Web应用中常见的DOM结构变化模式。如果一个组件的根元素类型改变了,那么整个组件树会被销毁并重建。
这些策略共同作用,使得Vue能够在数据变化时,以一种"精打细算"的方式更新DOM,避免了不必要的性能损耗,为用户带来了流畅的应用体验。
结语:Diff的启示与未来
通过对Vue Diff算法中UNKEYED_FRAGMENT和KEYED_FRAGMENT两种核心路径的剖析,我们不难发现其设计上的权衡与智慧。无Key模式追求简单,适用于结构固定的简单列表;而有Key模式则通过更复杂的逻辑,实现了对动态列表的高效更新,尤其是在节点重排、增删等场景下表现优异。
理解Diff算法的原理,不仅能帮助我们写出性能更优的Vue应用(例如,在v-for中正确使用key),更能让我们体会到前端框架在追求极致用户体验和开发效率背后所付出的努力。随着前端技术的不断演进,Diff算法本身也在持续优化,但其核心思想------最小化DOM操作,将始终是前端性能优化的重要基石。
希望本文能为你打开一扇深入Vue源码的窗,激发你对前端底层原理的探索热情!