本文发表在知乎,辛苦移步~~ 《mmdetection3d中激光雷达速度分割模型解析
》
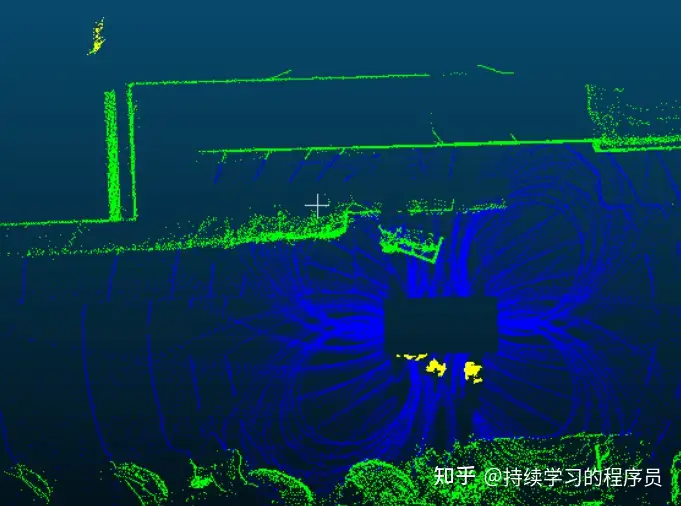
激光雷达速度分割使用的技术架构类似于上一篇所讲的《mmdetection3d中lidar semantic parsing(激光雷达语义分割)模型解析》,不同之处在于语义分割对每个点的类别进行分类(地面,绿植等),而速度分割是对每个点的动静态信息进行分类(本项目中分4类:动态,静态,噪声,地面,主要是使用前2类,如下图,黄色为动态,绿色为静态,蓝色为地面)。
本文发表在知乎,辛苦移步~~ 《mmdetection3d中激光雷达速度分割模型解析
》
激光雷达速度分割使用的技术架构类似于上一篇所讲的《mmdetection3d中lidar semantic parsing(激光雷达语义分割)模型解析》,不同之处在于语义分割对每个点的类别进行分类(地面,绿植等),而速度分割是对每个点的动静态信息进行分类(本项目中分4类:动态,静态,噪声,地面,主要是使用前2类,如下图,黄色为动态,绿色为静态,蓝色为地面)。