一.FreeRTOS移植到STM32F103C8T6
可参考下述链接:【FreeRTOS移植到STM32F103C8T6超详细教程-->>>基于标准库】_freertos stm32f103c8t6-CSDN博客
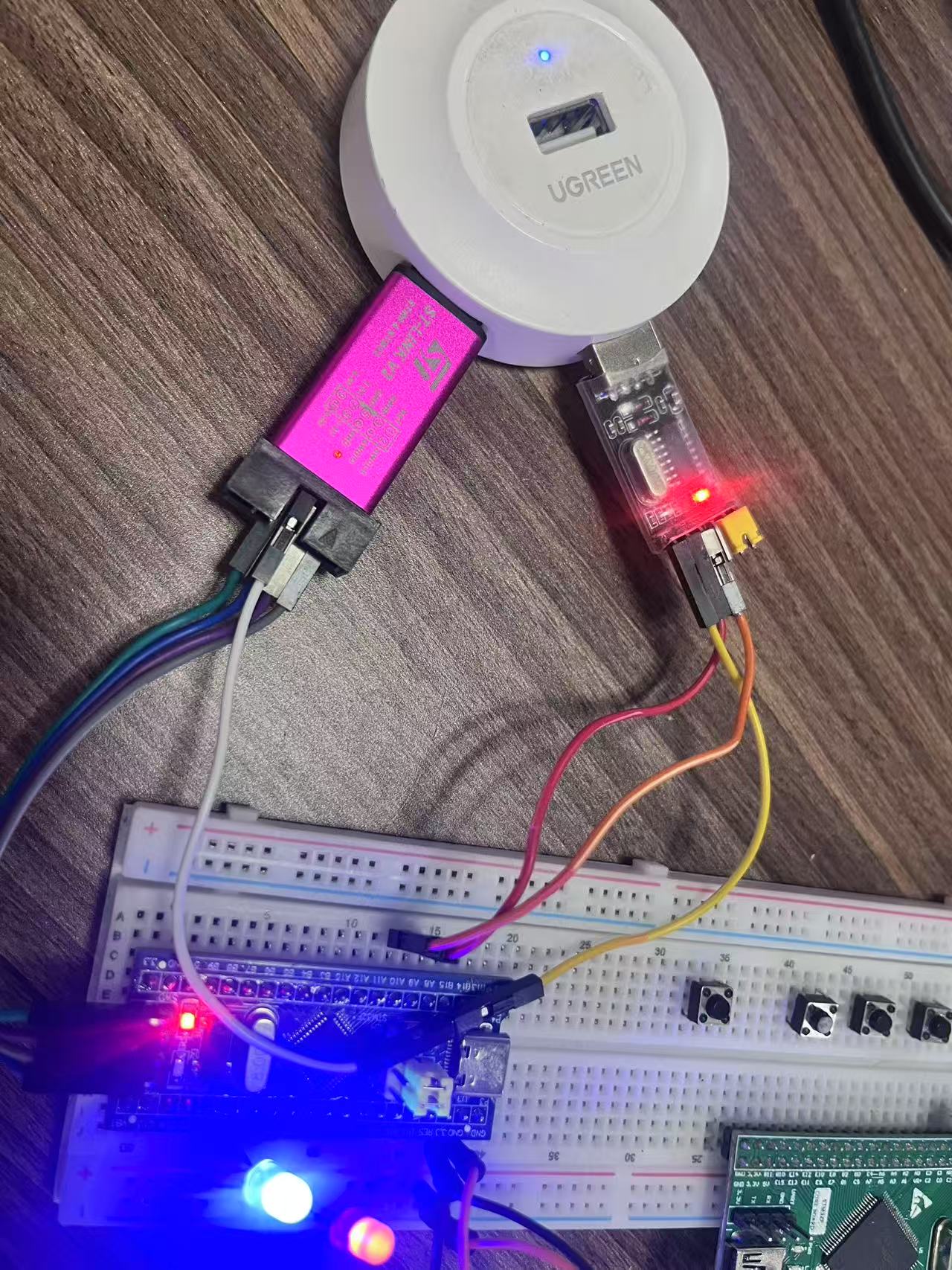
二.FreeRTOS移植硬件外设(串口/LED)
要学习的点:
vTaskDelete(xTask2Handle);
FreeRTOS_03_delete_task实验过程
所使用的是江科大的串口;
我们要做这些事情:
创建
任务1:任务1的大循环里,创建任务2,然后休眠一段时间
任务2:打印一句话,然后就删除自己
任务3:灯的闪烁
2.1 Serial.c
cpp
#include "stm32f10x.h" // Device header
#include <stdio.h>
#include <stdarg.h>
uint8_t Serial_RxData;
uint8_t Serial_RxFlag;
void Serial_Init(void)
{
RCC_APB2PeriphClockCmd(RCC_APB2Periph_USART1, ENABLE);
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA, ENABLE);
GPIO_InitTypeDef GPIO_InitStructure;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP;
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_9;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(GPIOA, &GPIO_InitStructure);
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IPU;
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_10;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(GPIOA, &GPIO_InitStructure);
USART_InitTypeDef USART_InitStructure;
USART_InitStructure.USART_BaudRate = 9600;
USART_InitStructure.USART_HardwareFlowControl = USART_HardwareFlowControl_None;
USART_InitStructure.USART_Mode = USART_Mode_Tx | USART_Mode_Rx;
USART_InitStructure.USART_Parity = USART_Parity_No;
USART_InitStructure.USART_StopBits = USART_StopBits_1;
USART_InitStructure.USART_WordLength = USART_WordLength_8b;
USART_Init(USART1, &USART_InitStructure);
USART_ITConfig(USART1, USART_IT_RXNE, ENABLE);
NVIC_PriorityGroupConfig(NVIC_PriorityGroup_2);
NVIC_InitTypeDef NVIC_InitStructure;
NVIC_InitStructure.NVIC_IRQChannel = USART1_IRQn;
NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE;
NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority = 1;
NVIC_InitStructure.NVIC_IRQChannelSubPriority = 1;
NVIC_Init(&NVIC_InitStructure);
USART_Cmd(USART1, ENABLE);
}
void Serial_SendByte(uint8_t Byte)
{
USART_SendData(USART1, Byte);
while (USART_GetFlagStatus(USART1, USART_FLAG_TXE) == RESET);
}
void Serial_SendArray(uint8_t *Array, uint16_t Length)
{
uint16_t i;
for (i = 0; i < Length; i ++)
{
Serial_SendByte(Array[i]);
}
}
void Serial_SendString(char *String)
{
uint8_t i;
for (i = 0; String[i] != '\0'; i ++)
{
Serial_SendByte(String[i]);
}
}
uint32_t Serial_Pow(uint32_t X, uint32_t Y)
{
uint32_t Result = 1;
while (Y --)
{
Result *= X;
}
return Result;
}
void Serial_SendNumber(uint32_t Number, uint8_t Length)
{
uint8_t i;
for (i = 0; i < Length; i ++)
{
Serial_SendByte(Number / Serial_Pow(10, Length - i - 1) % 10 + '0');
}
}
int fputc(int ch, FILE *f)
{
Serial_SendByte(ch);
return ch;
}
void Serial_Printf(char *format, ...)
{
char String[100];
va_list arg;
va_start(arg, format);
vsprintf(String, format, arg);
va_end(arg);
Serial_SendString(String);
}
uint8_t Serial_GetRxFlag(void)
{
if (Serial_RxFlag == 1)
{
Serial_RxFlag = 0;
return 1;
}
return 0;
}
uint8_t Serial_GetRxData(void)
{
return Serial_RxData;
}
void USART1_IRQHandler(void)
{
if (USART_GetITStatus(USART1, USART_IT_RXNE) == SET)
{
Serial_RxData = USART_ReceiveData(USART1);
Serial_RxFlag = 1;
USART_ClearITPendingBit(USART1, USART_IT_RXNE);
}
}2.2Serial.h
cpp
#ifndef __SERIAL_H
#define __SERIAL_H
#include <stdio.h>
void Serial_Init(void);
void Serial_SendByte(uint8_t Byte);
void Serial_SendArray(uint8_t *Array, uint16_t Length);
void Serial_SendString(char *String);
void Serial_SendNumber(uint32_t Number, uint8_t Length);
void Serial_Printf(char *format, ...);
uint8_t Serial_GetRxFlag(void);
uint8_t Serial_GetRxData(void);
#endif2.3 LED.c
cpp
#include "stm32f10x.h" // Device header
void LED_Init(void)
{
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA, ENABLE);
GPIO_InitTypeDef GPIO_InitStructure;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_Out_PP;
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_1 | GPIO_Pin_2;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(GPIOA, &GPIO_InitStructure);
GPIO_SetBits(GPIOA, GPIO_Pin_1 | GPIO_Pin_2);
}
void LED1_ON(void)
{
GPIO_ResetBits(GPIOA, GPIO_Pin_1);
}
void LED1_OFF(void)
{
GPIO_SetBits(GPIOA, GPIO_Pin_1);
}
void LED1_Turn(void)
{
if (GPIO_ReadOutputDataBit(GPIOA, GPIO_Pin_1) == 0)
{
GPIO_SetBits(GPIOA, GPIO_Pin_1);
}
else
{
GPIO_ResetBits(GPIOA, GPIO_Pin_1);
}
}
void LED2_ON(void)
{
GPIO_ResetBits(GPIOA, GPIO_Pin_2);
}
void LED2_OFF(void)
{
GPIO_SetBits(GPIOA, GPIO_Pin_2);
}
void LED2_Turn(void)
{
if (GPIO_ReadOutputDataBit(GPIOA, GPIO_Pin_2) == 0)
{
GPIO_SetBits(GPIOA, GPIO_Pin_2);
}
else
{
GPIO_ResetBits(GPIOA, GPIO_Pin_2);
}
}2.4 LED.h
cpp
#ifndef __LED_H
#define __LED_H
void LED_Init(void);
void LED1_ON(void);
void LED1_OFF(void);
void LED1_Turn(void);
void LED2_ON(void);
void LED2_OFF(void);
void LED2_Turn(void);
#endif2.5 main.c
cpp
#include "stm32f10x.h" // Device header
#include "LED.h"
#include "FreeRTOS.h"
#include "task.h"
#include "Serial.h"
TaskHandle_t xTask2Handle;
static void prvSetupHardware( void );
void vTask2( void *pvParameters )
{
/* 打印任务的信息 */
Serial_SendString("Task2 is running and about to delete itself\r\n");
// 可以直接传入参数NULL, 这里只是为了演示函数用法
vTaskDelete(xTask2Handle);
}
void vTask1(void *pvParameters)
{
const TickType_t xDelay100ms = pdMS_TO_TICKS(100UL);
BaseType_t ret;
while(1)
{
Serial_SendString("Task1 is running\r\n");
ret = xTaskCreate(vTask2, "Task 2", 1000, NULL, 2, &xTask2Handle);
if(ret != pdPASS)
Serial_SendString("Create Task2 Failed\r\n");
vTaskDelay(xDelay100ms);//任务1 Block期间,轮到Idle任务执行:它释放任务2的内存(TCB、栈)
}
}
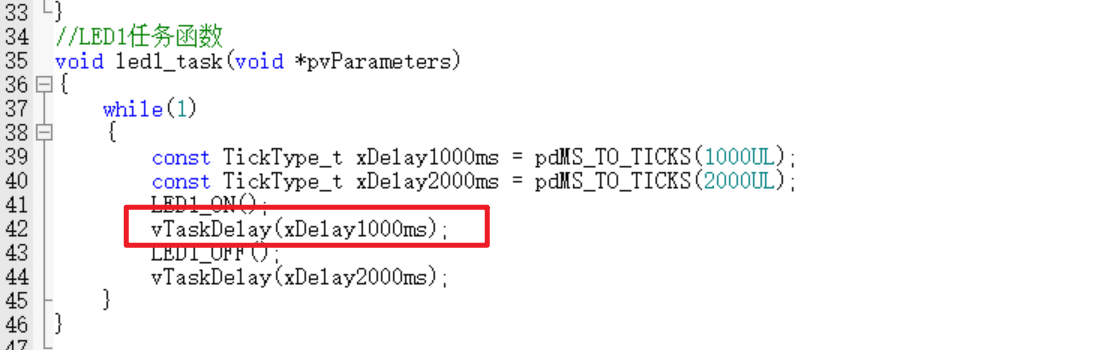
//LED1任务函数
void led1_task(void *pvParameters)
{
while(1)
{
const TickType_t xDelay1000ms = pdMS_TO_TICKS(1000UL);
const TickType_t xDelay2000ms = pdMS_TO_TICKS(2000UL);
LED1_ON();
vTaskDelay(xDelay1000ms);
LED1_OFF();
vTaskDelay(xDelay2000ms);
}
}
/*******************************************************************************
* 函 数 名 : main
* 函数功能 : 主函数
* 输 入 : 无
* 输 出 : 无
*******************************************************************************/
int main( void )
{
prvSetupHardware();
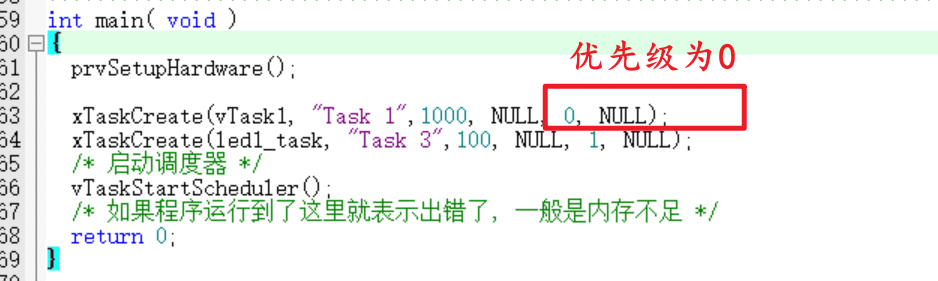
xTaskCreate(vTask1, "Task 1",1000, NULL, 1, NULL);
xTaskCreate(led1_task, "Task 3",100, NULL, 1, NULL);
/* 启动调度器 */
vTaskStartScheduler();
/* 如果程序运行到了这里就表示出错了, 一般是内存不足 */
return 0;
}
static void prvSetupHardware( void )
{
Serial_Init();
LED_Init();
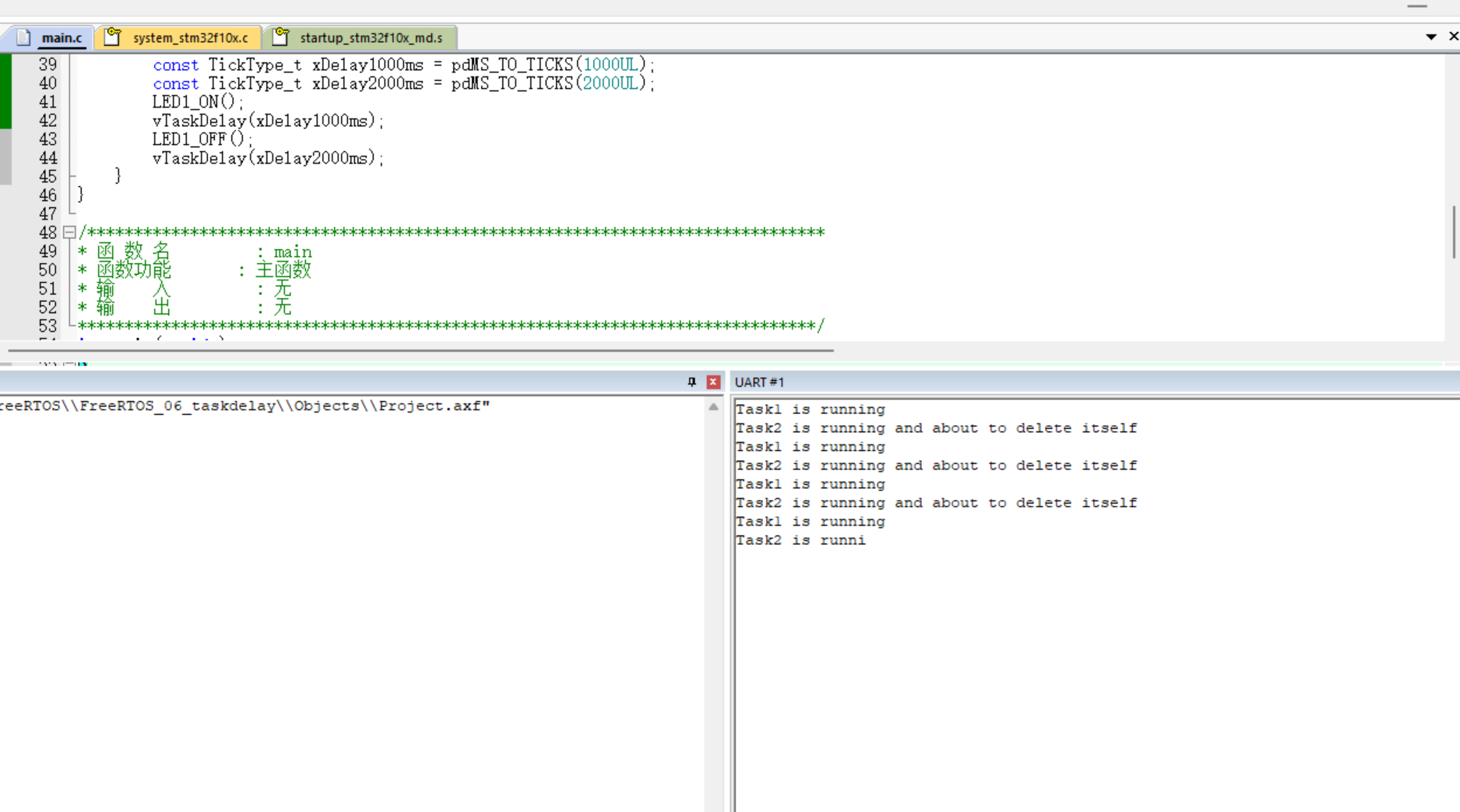
}结果
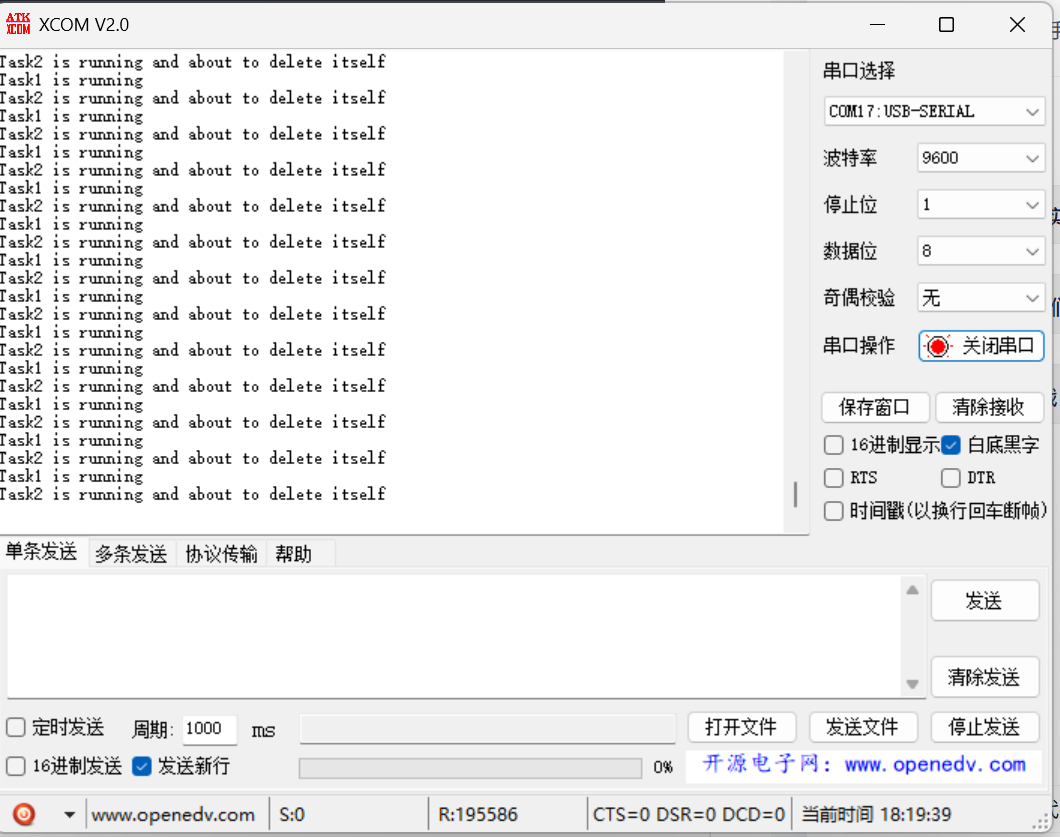
分析
main函数中创建任务1,优先级为1。LED的,优先级为1,
任务1运行时,它创建任务2,任务2的优先级是2。
任务2的优先级最高,它马上执行。
任务2打印一句话后,就删除了自己。
任务2被删除后,任务1的优先级和LED优先级一致,交替执行;轮到任务1继续运行,它调用 vTaskDelay() 进入Block状态;
任务1 Block期间,轮到Idle任务执行:它释放任务2的内存(TCB、栈),时间到后,任务1变为最高优先级的任务继续执行,如此循环。
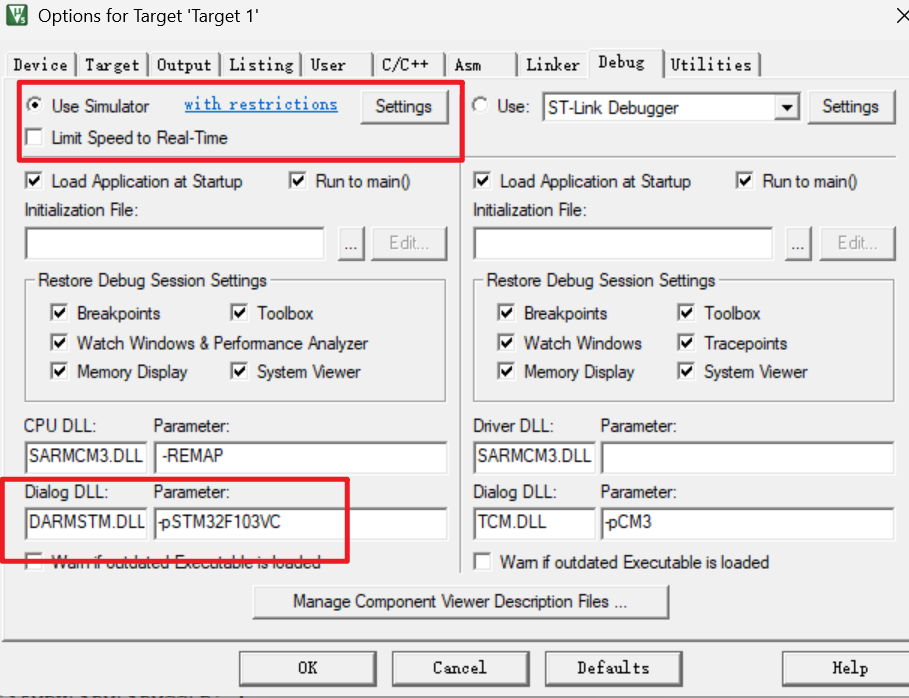
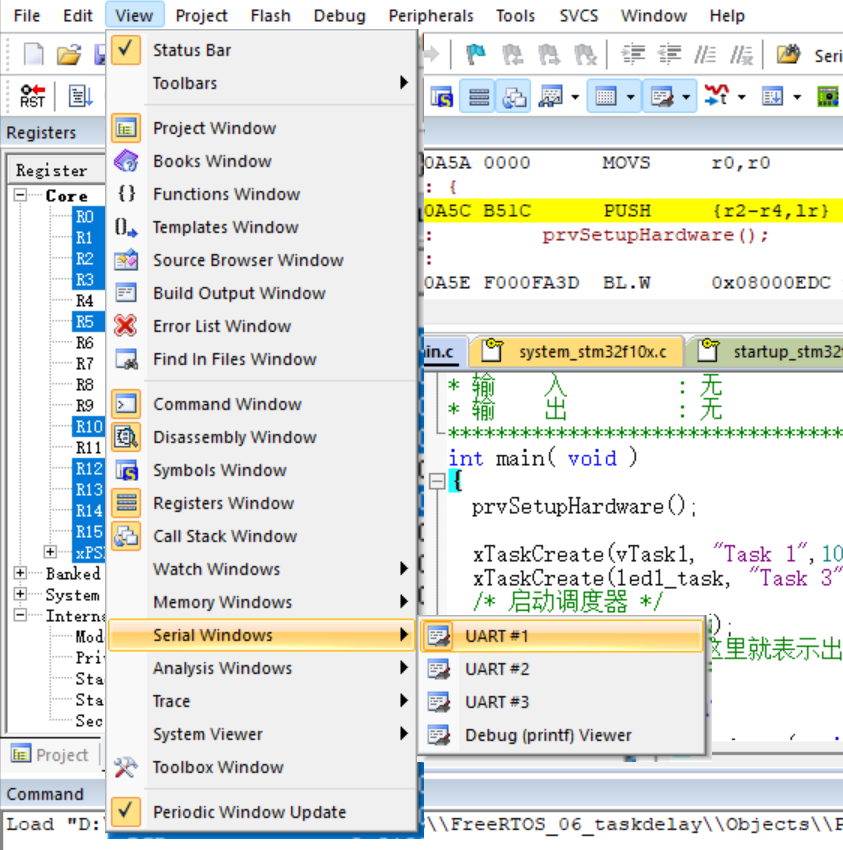
三.FreeRTOS Use Simulator
四.FreeRTOS钩子函数引发的思考
实验过程
还是针对上述
"二.FreeRTOS移植硬件外设(串口/LED)"
要学习的点:**vTaskDelete(xTask2Handle);**FreeRTOS_03_delete_task实验过程
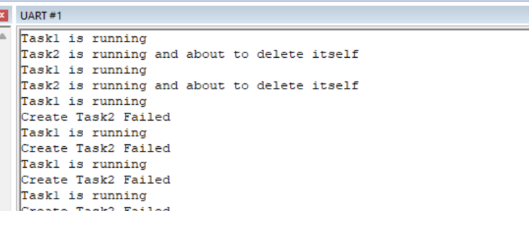
我们可以看到在vTask1里面有这句话 在vTask1 Delay阻塞 任务1 Block期间,轮到Idle任务执行:它释放任务2的内存(TCB、栈); 我如果把这句话注释掉呢,是不是就"Create Task2 Failed\r\n";
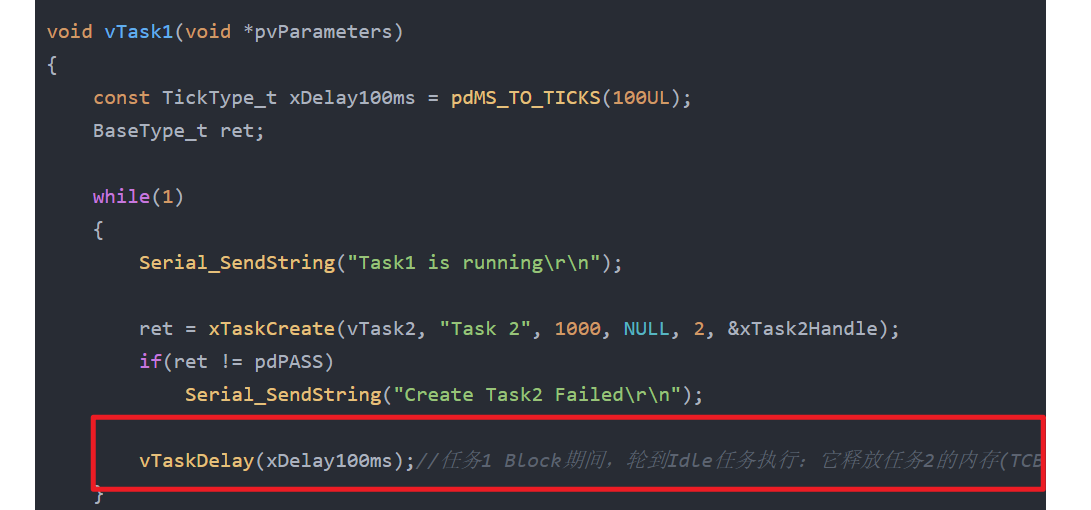
我如果把这句话注释掉呢,是不是就"Create Task2 Failed\r\n"; 试了一下还真是,如下图:
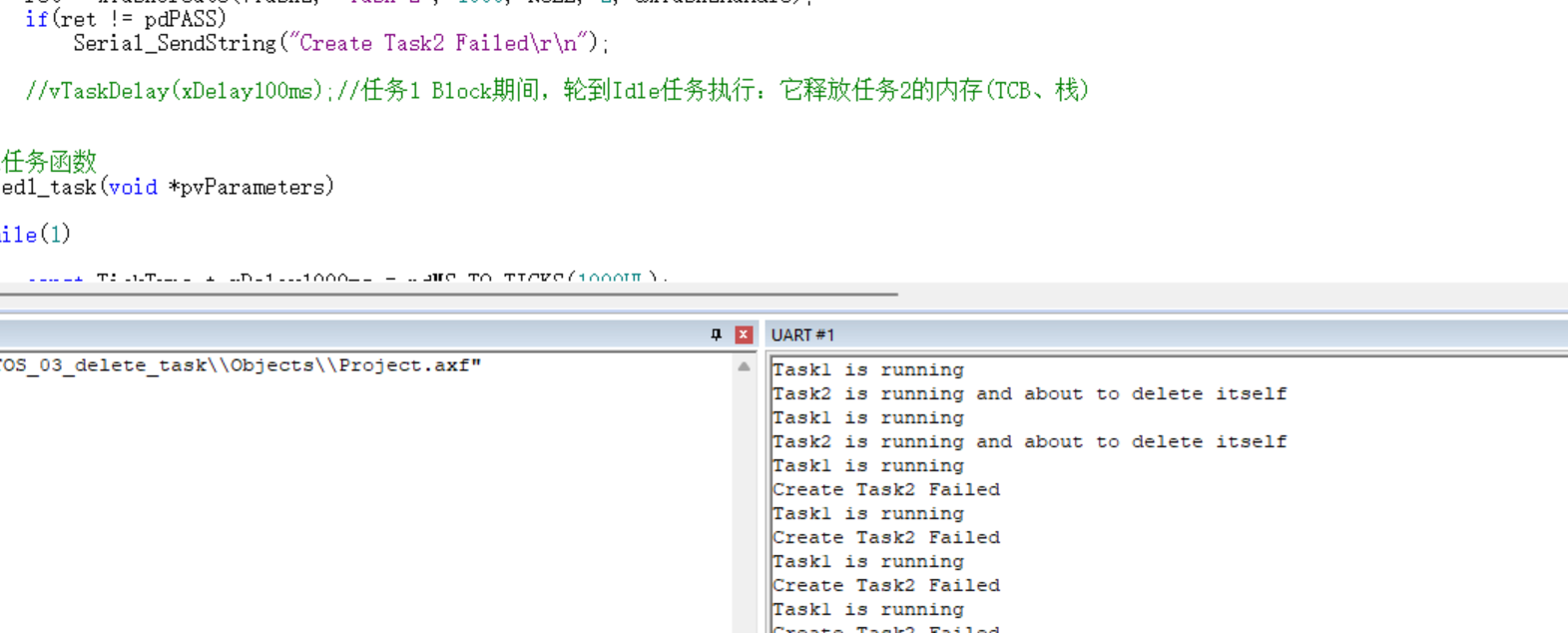
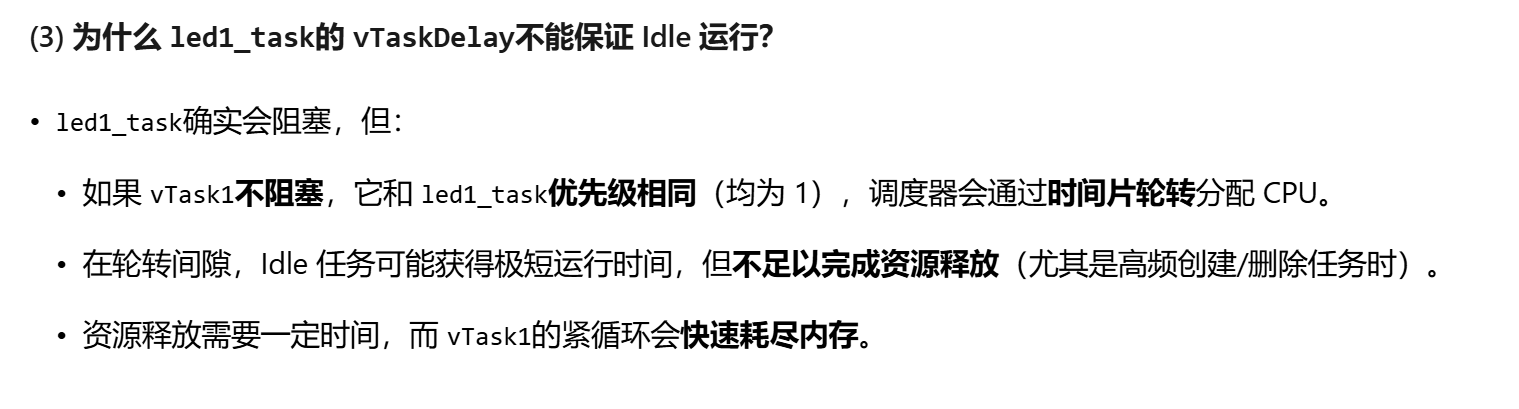
那我转过来一想 欸不对呀,led1_task不也有vTaskDelay吗 ,为啥"Create Task2 Failed\r\n" 空闲任务不会回收Task2的"尸体"吗;
问了一下Al 才想起来 都是1的优先级 ,原来 led1_task阻塞的时候,Task 1又开始了;idle任务根本没机会执行啊;所以会报"Create Task2 Failed\r\n"
xTaskCreate(vTask1, "Task 1",1000, NULL, 1, NULL);
xTaskCreate(led1_task, "Task 3",100, NULL, 1, NULL);
那钩子函数是干什么的呢;请看;今天看韦东山老师的课程和资料;看到
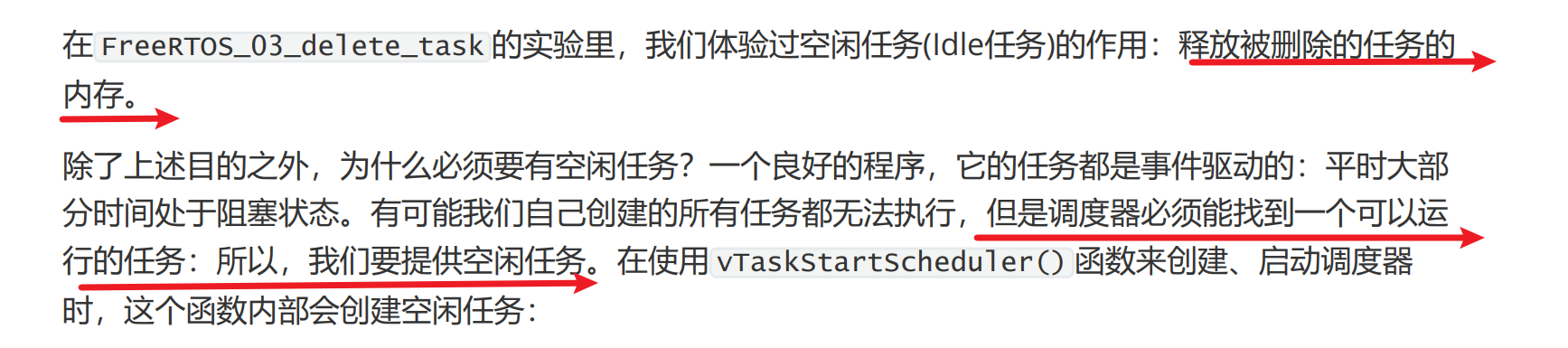
释放被删除的任务的内存,对于自杀来说 vTaskDelete(NULL);,那么由空闲任务 来清理"尸体"
只要有机会让空闲任务来执行

就是让由空闲任务来执行的机会;
空闲任务优先级与调度机制
空闲任务的优先级为0,是系统中最低优先级的任务。当任何用户任务进入就绪状态时,调度器会立即将空闲任务切换出去,让用户任务运行。这种机制称为用户任务对空闲任务的"抢占"(pre-emption)。
任务删除与内存释放
使用vTaskDelete()删除任务时,必须确保空闲任务有机会执行。因为被删除任务的内存释放是由空闲任务完成的。如果空闲任务无法运行,可能导致内存泄漏。
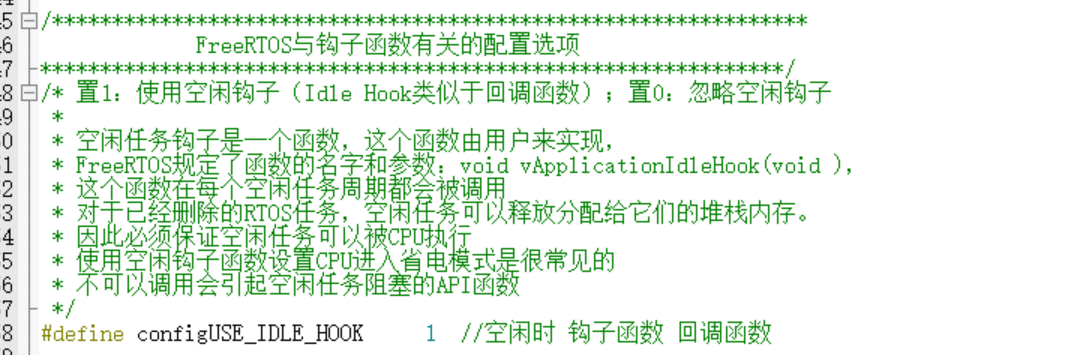
空闲任务钩子函数
空闲任务钩子函数(Idle Task Hook Functions)在空闲任务每次循环时被调用。它的主要用途包括:
-
执行低优先级、后台、连续执行的函数。这类函数不适合在高优先级任务中运行,但可以在空闲任务中处理。
-
测量系统空闲时间。空闲任务能够运行意味着所有高优先级任务都处于阻塞状态,通过测量空闲任务的执行时间可以计算处理器的占用率。公式如下: \\text{CPU占用率} = 100% - \\left(\\frac{\\text{空闲任务执行时间}}{\\text{总时间}}\\right) \\times 100%
-
进入省电模式。当空闲任务运行时,表明系统没有重要任务需要处理,此时可以触发低功耗模式以节省能源。
实现钩子函数的注意事项
- 钩子函数应尽可能简短,避免长时间阻塞空闲任务。
- 钩子函数中不应调用可能导致任务阻塞的API(如
vTaskDelay())。 - 如果启用钩子函数,需在FreeRTOS配置文件中设置
configUSE_IDLE_HOOK为1。