PCA降维
- [降维 Dimensionality Reduction](#降维 Dimensionality Reduction)
- PCA
-
- 投影值怎么计算
- 如何实现:朴素方法 (Naïve Implementation)
- 具体计算推导
-
- [1 PCA投影方差计算------max w T C w w^T C w wTCw,C协方差矩阵](#1 PCA投影方差计算——max w T C w w^T C w wTCw,C协方差矩阵)
- [2 max w T C w w^T C w wTCw------求解主成分方向 w w w](#2 max w T C w w^T C w wTCw——求解主成分方向 w w w)
- [PCA 在降维中的应用](#PCA 在降维中的应用)
-
- 方差贡献率 (Proportion of Variance, PoV)
- [如何选择 k k k](#如何选择 k k k)
- PCA:重建与重建误差 (Reconstruction & Error)
-
- [1. PCA 投影](#1. PCA 投影)
- [2. PCA 重建](#2. PCA 重建)
- [3. 重建误差](#3. 重建误差)
- [4. 含义](#4. 含义)
- PCA的缺陷
Principal Component Analysis (PCA) 主成分分析
降维 Dimensionality Reduction
矩阵 X X X 的维度为:
X ∈ R N × d X \in \mathbb{R}^{N \times d} X∈RN×d
N N N :样本数量 (number of samples)
d d d :特征维度 (number of features)
降维后, d d d会变小。
比如,10,1降维后变成10,直接删除一个维度,是最简单直接的降维方式(当然会有很多问题)。
PCA
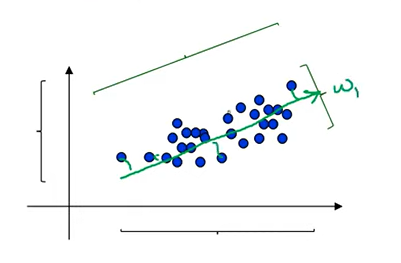
PCA 是投影,本质是降维。PCA是实现这一点的方法,一种数据变换的方法 (A method for transforming the data)
将数据投影到一组正交向量上,使得投影后数据的方差最大。
在方向 w w w 上的投影公式:
z = w T x z = w^T x z=wTx
目标是找到使投影方差最大的方向 w w w:
max w V a r ( z ) \max_w Var(z) wmaxVar(z)
PCA降维,投影到一个单位向量方向,各个数据点方差最大,这是第一主成分。与第一主成分的正交(垂直)的方向单位向量,是第二主成分。
投影值怎么计算
举个栗子
a 1 = 2 3 a_1 = \begin{bmatrix} 2 \\ 3 \end{bmatrix} a1=23
我们想要把它投影到 x x x 轴,于是点乘 w = 1 0 w = \begin{bmatrix} 1 \\ 0 \end{bmatrix} w=10,
w T a 1 = 1 0 2 3 = 2 w^T a_1 = \begin{bmatrix} 1 & 0 \end{bmatrix} \begin{bmatrix} 2 \\ 3 \end{bmatrix} = 2 wTa1=1023=2
如果我们想要把它投影到 y y y 轴,于是点乘 w = 0 1 w = \begin{bmatrix} 0 \\ 1 \end{bmatrix} w=01,
w T a 1 = 0 1 2 3 = 3 w^T a_1 = \begin{bmatrix} 0 & 1 \end{bmatrix} \begin{bmatrix} 2 \\ 3 \end{bmatrix} = 3 wTa1=0123=3
由此可见,如果想要把一个点投影到别的轴上,点乘这个轴的单位方向向量就可以了。
如何实现:朴素方法 (Naïve Implementation)
设置 p = 0 p = 0 p=0
对 p p p 从 0 0 0 到 π \pi π 进行迭代(分步):
-
计算投影向量 (projection vector):
w p = cos ( p ) sin ( p ) w_p = \begin{bmatrix} \cos(p) \\ \sin(p) \end{bmatrix} wp=cos(p)sin(p) -
将数据投影到该方向:
z i = w p T x i z_i = w_p^T x_i zi=wpTxi -
计算投影后数据的方差 (variance)。
-
绘制方差随 p p p 变化的曲线。
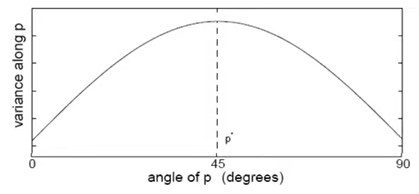
-
找到使方差最大的 p p p。
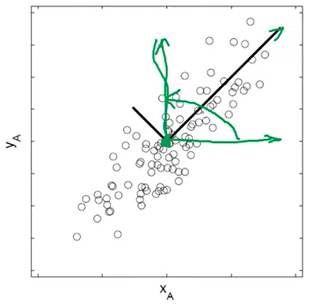
主成分分析 (PCA) 的直观实现:
通过不同角度 $p$ 的方向向量 $w_p$ 投影数据;
计算投影后的方差;
找到方差最大的方向,这个方向就是 **第一主成分**。
具体计算推导
1 PCA投影方差计算------max w T C w w^T C w wTCw,C协方差矩阵
投影方差最大------> max w T C w w^T C w wTCw,C是协方差矩阵,以下是推导过程,
主成分分析 (PCA):投影方差与协方差矩阵的关系
定义数据在方向 w w w 上的投影:
z = w T x z = w^T x z=wTx
投影的方差:
V a r ( z ) = V a r ( w T x ) = E ( w T x − w T μ ) 2 Var(z) = Var(w^T x) = E\big(w\^T x - w\^T \\mu)\^2\\big Var(z)=Var(wTx)=E(wTx−wTμ)2
展开:
= E ( w T ( x − μ ) ) ( w T ( x − μ ) ) = E w T ( x − μ ) ( x − μ ) T w = E\big(w\^T(x - \\mu))(w\^T(x - \\mu))\\big\\ = E\bigw\^T(x - \\mu)(x - \\mu)\^T w\\big =E(wT(x−μ))(wT(x−μ))=EwT(x−μ)(x−μ)Tw
提取常数 w w w:
= w T E ( x − μ ) ( x − μ ) T w = w^T E\big(x - \\mu)(x - \\mu)\^T\\big w =wTE(x−μ)(x−μ)Tw
协方差矩阵公式:
C o v ( x ) = E ( x − μ ) ( x − μ ) T = C Cov(x) = E(x - \\mu)(x - \\mu)\^T = C Cov(x)=E(x−μ)(x−μ)T=C
最终推出:
V a r ( z ) = w T C w Var(z) = w^T C w Var(z)=wTCw
数据在方向 w w w上的投影方差 = w T C w = w^T C w =wTCw,而 PCA 就是寻找让这个这个投影方差最大的方向 w w w。
2 max w T C w w^T C w wTCw------求解主成分方向 w w w
目标,希望找到一个单位向量 w w w,使得投影后的方差最大:
max w V a r ( z 1 ) = w T C w \max_w Var(z_1) = w^T C w wmaxVar(z1)=wTCw
约束条件是 w T w = 1 w^T w = 1 wTw=1
其中 C C C 是协方差矩阵。
拉格朗日乘子法 (Lagrange Multipliers)
将带约束的优化问题转化为拉格朗日函数(把带约束的优化问题转成无约束问题):
L ( w , α ) = w T C w − α ( w T w − 1 ) L(w, \alpha) = w^T C w - \alpha (w^T w - 1) L(w,α)=wTCw−α(wTw−1)
所求为 m a x w T C w max \quad w^T C w maxwTCw,也就是 m a x L ( w , α ) max\quad L(w, \alpha) maxL(w,α)。
对 w w w 求导
∂ L ∂ w = 2 C w − 2 α w = 0 \frac{\partial L}{\partial w} = 2 C w - 2 \alpha w = 0 ∂w∂L=2Cw−2αw=0
C w = α w C w = \alpha w Cw=αw
- w w w 是协方差矩阵 C C C 的 特征向量
- α \alpha α 是对应的 特征值
使方差最大的方向,就是 **最大特征值对应的特征向量**
最终,我们所要求最大化投影方差,只要求协方差矩阵的特征向量就行了。
PCA 在降维中的应用
协方差矩阵中较小的特征值对应的方向对总方差贡献很小,可以舍弃而不会丢失太多信息。
我们通常保留累计贡献率达到 90% 的前 k k k 个特征值和特征向量。
方差贡献率 (Proportion of Variance, PoV)
Proportion of Variance Explained (累计方差贡献率曲线)
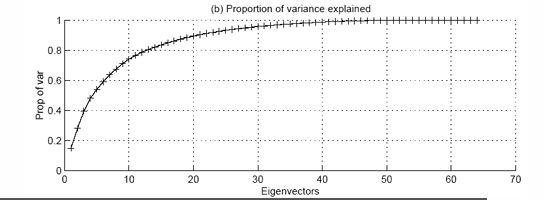
横轴 (Eigenvectors):主成分个数 k k k
纵轴 (Prop of Var):累计方差贡献率(PoV)
曲线随 k k k 增大而上升,并逐渐接近 1。
在图中,当 k≈20 时,累计方差贡献率已经接近 90%,说明只需保留前 20 个主成分,就能保留大部分信息。
P o V ( k ) = λ 1 + λ 2 + ⋯ + λ k λ 1 + λ 2 + ⋯ + λ d PoV(k) = \frac{\lambda_1 + \lambda_2 + \cdots + \lambda_k}{\lambda_1 + \lambda_2 + \cdots + \lambda_d} PoV(k)=λ1+λ2+⋯+λdλ1+λ2+⋯+λk
其中:
- λ i \lambda_i λi 为特征值,且按从大到小排序
- d d d 为原始数据的维度
- k < d k < d k<d 为选择保留的主成分数
如何选择 k k k
一般当 P o V > 0.9 PoV > 0.9 PoV>0.9 时可以停止。
也可以通过 碎石图 (Scree Plot) 找"肘点 (elbow)"来确定 k k k。
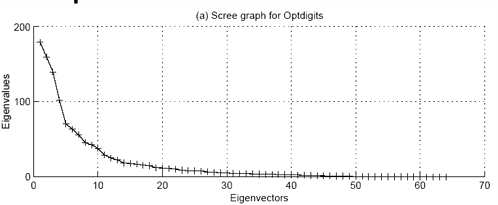
Scree Graph (碎石图)
横轴 (Eigenvectors):特征向量的索引(对应主成分的序号)。
纵轴 (Eigenvalues):对应的特征值大小(代表方差贡献)。
数据投影:将 d d d 维数据 x x x (均值向量为 μ \mu μ)投影到 k k k 维子空间,使用 k × d k \times d k×d 的投影矩阵 W W W
z = W T ( x − μ ) z = W^T (x - \mu) z=WT(x−μ)
其中:
- W W W 包含前 k k k 个特征向量
- z z z 是新的 k k k 维数据表示
PCA:重建与重建误差 (Reconstruction & Error)
1. PCA 投影
在 PCA 中,数据 x x x 被投影到低维空间:
z = W T ( x − μ ) z = W^T (x - \mu) z=WT(x−μ)
其中:
- x x x :原始 d d d 维数据向量
- μ \mu μ :均值向量
- W W W : d × k d \times k d×k 的投影矩阵(由前 k k k 个特征向量组成)
- z z z :新的 k k k 维数据表示
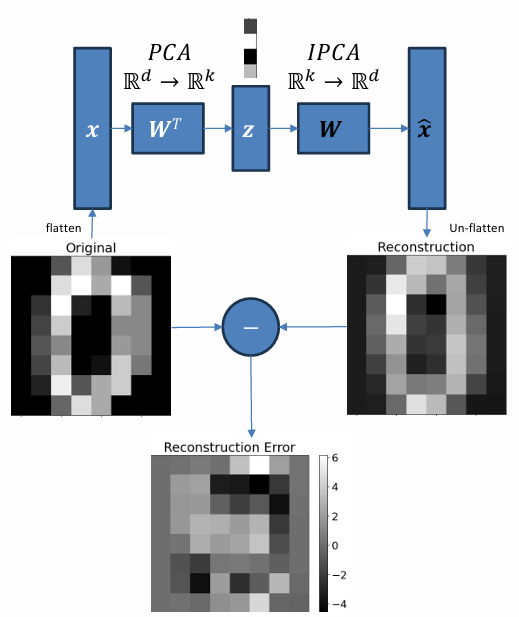
2. PCA 重建
从低维表示 z z z 还原回高维近似数据:
x ^ = W z + μ \hat{x} = W z + \mu x^=Wz+μ
因为 W W W 的列向量是正交的,有 W W T = I WW^T = I WWT=I。
3. 重建误差
定义为原始数据 x x x 与重建数据 x ^ \hat{x} x^ 的差异:
E r e c = ∑ t = 1 N ∥ x ^ t − x t ∥ E_{rec} = \sum_{t=1}^N \| \hat{x}^t - x^t \| Erec=t=1∑N∥x^t−xt∥
其中:
- N N N :样本总数
- x ^ t \hat{x}^t x^t :第 t t t 个样本的重建结果
- x t x^t xt :第 t t t 个原始样本
4. 含义
- 重建误差越小,说明保留的主成分越能代表原始数据。
- 当 k = d k=d k=d 时(即不降维),重建误差为 0。
- 当 k < d k<d k<d 时,误差取决于被舍弃的特征值大小。
PCA的缺陷
在图像中的应用
在不影响预测准确率的情况下,第一个主成分可能并不总是最佳主成分。
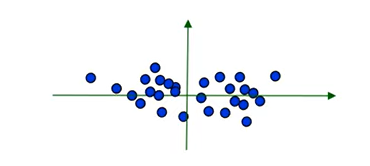
PCA的愚蠢
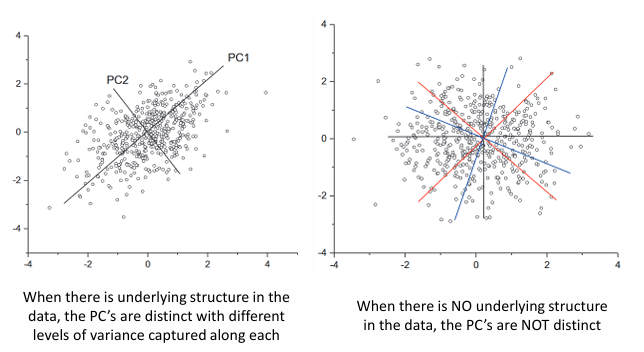
PCA是一种愚蠢的算法,它在代码中实现,你给它数据,它就会输出主成分。尽管有些数据被我们解释为最大方差的方向,但事实可能并不是,比如右图。这取决于数据集的选择。如果数据集类似左边,它可以给出一些最大方差的方向。但如果像右边这样,那就完全没有意义。