文章目录
- 前言
- 1.线扫相机的选型
-
- [1.1 线阵相机参数](#1.1 线阵相机参数)
- [1.2 线扫相机的选型:](#1.2 线扫相机的选型:)
-
- [1.2.1 计算实例一:](#1.2.1 计算实例一:)
- [1.2.2 计算实例二:](#1.2.2 计算实例二:)
- [1.3 行频调整](#1.3 行频调整)
- 2.线阵镜头选型
-
- [2.1 线阵镜头参数](#2.1 线阵镜头参数)
-
- [2.1.1 镜头接口类型](#2.1.1 镜头接口类型)
- [2.1.2 相机与镜头搭配注意事项](#2.1.2 相机与镜头搭配注意事项)
- [2.2 线阵镜头的选型](#2.2 线阵镜头的选型)
-
- [2.2.1 选型案例一:](#2.2.1 选型案例一:)
- [2.2.2 选型案例二:](#2.2.2 选型案例二:)
- 3.参考案例
前言
线阵与面阵区别

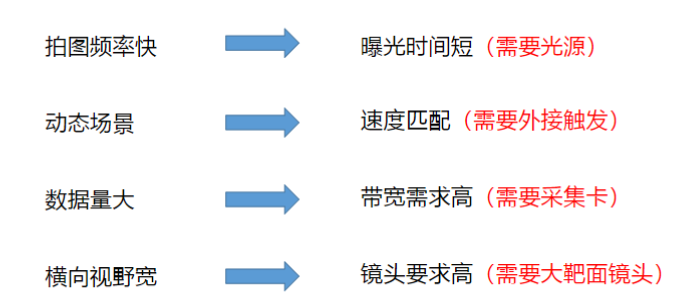
线阵相机的特性
1.线扫相机的选型
1.1 线阵相机参数
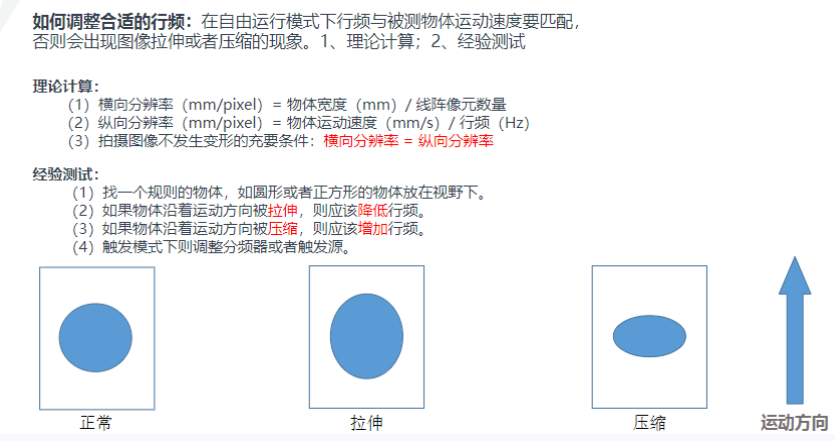
1.行频(Acquisition Line Rate):即相机每秒钟输出的图行数。在自由运行模式下,行频自行设定;在触发模式下,行频与输入的行信号有关。
2.行高(Height):行高是指拼成一帧图像所需要的行数,即一帧图像的纵向分辨率。
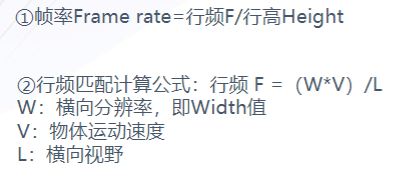
3.帧率:行高线阵相机的帧率与行频成正比,与行高成反比关系。即,帧率 = 行频 / 行高
1.2 线扫相机的选型:
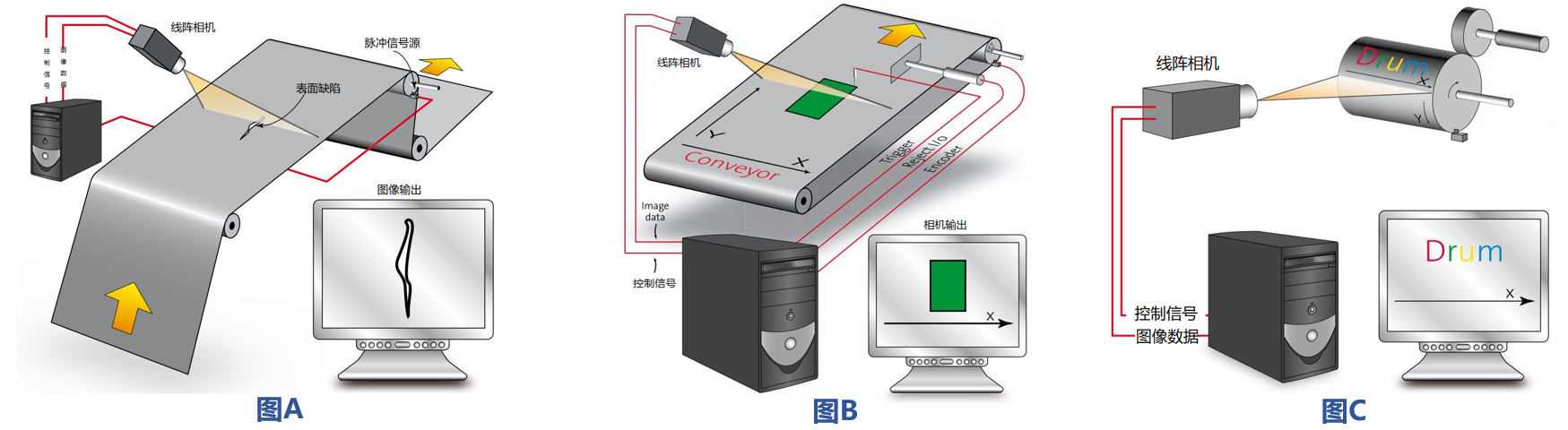
1.计算分辨率:幅宽/最小检测精度=每行需要的像素(图A:幅宽>>被拍摄物;图B:幅宽>被拍摄物;图C:幅宽≈被拍摄物 )
2.确定像素精度:幅宽/像素数=像素精度
3.确定行频:每秒运动速度/像素精度=理想行频
4.根据分辨率与行频,选定相机
1.2.1 计算实例一:
需求:幅宽为1800毫米、客户要求精度1毫米、运动速度25000mm/s
相机:1800/1=1800像素,最少2000像素,选定为2k相机。如想提高清晰度,则可用2-5个像素表达1mm,则在现有像素值上乘以2-5倍。
像素精度:1800/2048=0.9
理想行频:25000mm/0.9mm=27.8KHz
选择实际行频大于27.8KHz的2K相机即可
1.2.2 计算实例二:
1.3 行频调整
首先设定以下变量:
1.Hc:线阵相机的线数,如2K,4K,8K,16K等(单位:pixel)
2.Lo:目标物的幅宽(单位:mm)
3.Vo:目标物运行速率(单位:mm/s)
4.Vc:线阵相机线扫描速率(单位:Hz,即 线/s)
PH:横向精度(每个像素代表的实际宽度 单位:mm)
cpp
横向扫描精度:目标物的幅宽/线阵相机的线数,即PH=Lo/Hc ;PL:纵向精度(每个像素扫描的实际长度 单位:mm)
cpp
纵向扫描精度:目标物运行速率/线阵相机线扫描速率,即PL=Vo/Vc ;要想成像条件好,需要横向分辨率和纵向分辨率相等:
cpp
Lo/Hc=Vo/Vc相机的线扫描速率为:
cpp
Vc =(Hc ×Vo)/Lo其中Hc是线阵相机的线数, Lo目标物的幅宽,Vo目标物运行速率。
2.线阵镜头选型
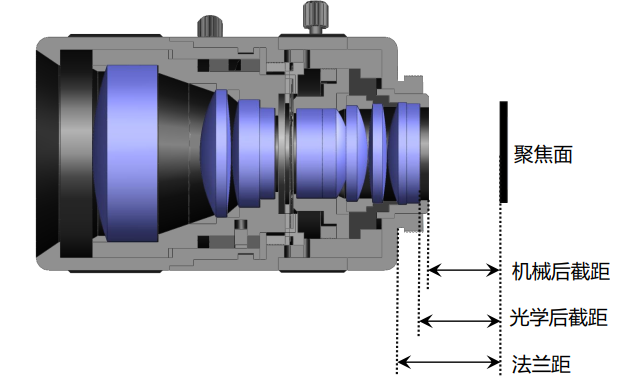
2.1 线阵镜头参数
法兰距 :相机接口定位面到像面的距离
机械后截距 :镜头最后的机械面到像面的距离
光学后截距 :镜头最后端镜片表面顶点到像面的距离
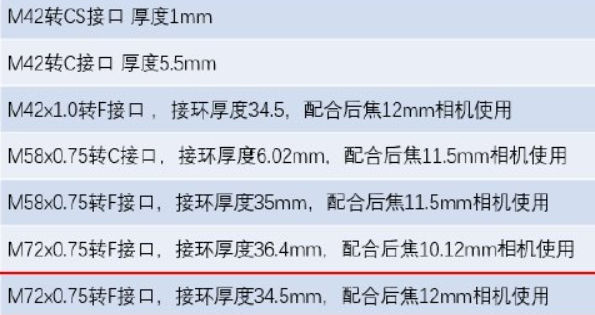
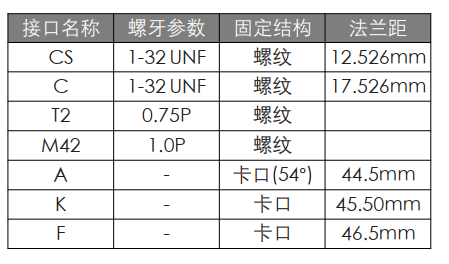
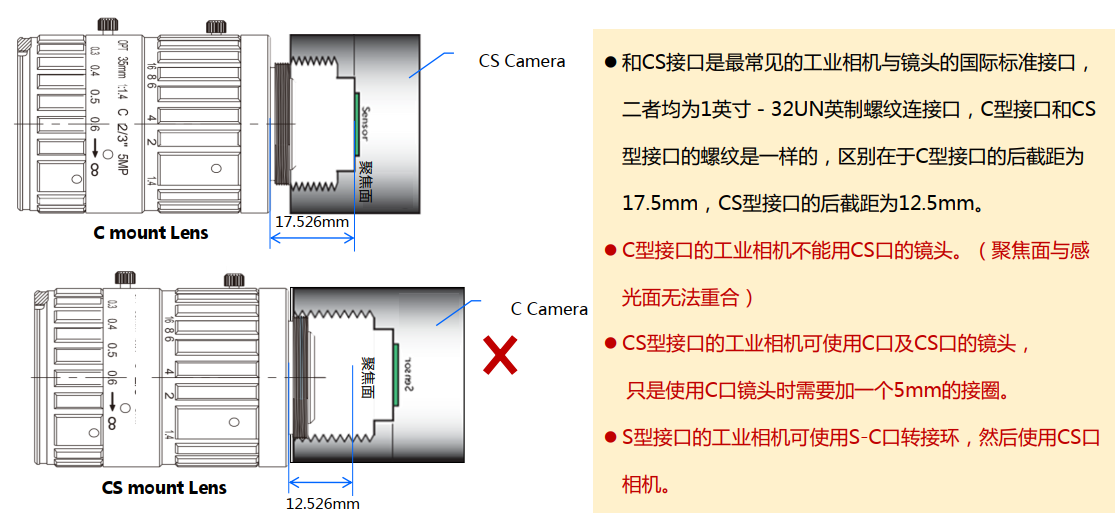
2.1.1 镜头接口类型
工业相机中有各种不同直径或法兰距的相机,相应地存在与其匹配的多种镜头。
镜头接口:相机和镜头的连接处,通常有C口、 CS口、 K口和F口等
2.1.2 相机与镜头搭配注意事项
待补充
2.2 线阵镜头的选型
2.2.1 选型案例一:

2.2.2 选型案例二:

3.参考案例
1.选型与参数计算