AUTOSAR BSW UML建模指南
AUTOSAR基础软件UML模型建模规范与最佳实践
目录
- [1. 概述](#1. 概述)
- [2. BSW UML模型结构](#2. BSW UML模型结构)
- [3. BSW模块建模](#3. BSW模块建模)
- [4. API函数建模](#4. API函数建模)
- [5. 模块依赖关系](#5. 模块依赖关系)
- [6. 数据类型建模](#6. 数据类型建模)
- [7. 服务建模](#7. 服务建模)
- [8. 总结](#8. 总结)
1. 概述
本文档基于AUTOSAR TR_BSWUMLModelModelingGuide规范,详细介绍了AUTOSAR基础软件(BSW)UML模型的建模方法和规范。BSW UML模型是AUTOSAR标准的重要组成部分,用于保持99+个文档的同步性,包括文件结构、接口定义、序列图和状态机等。
1.1 文档目的
BSW UML模型的主要目的是:
- 保持文档同步:确保所有相关文档在文件结构、接口、序列图等方面保持一致
- 自动化生成:通过AUTOSAR元模型工具(MMT)自动生成软件规范(SWS)文档
- 标准化建模:提供统一的建模规则和最佳实践
1.2 建模工具
AUTOSAR指定的UML建模工具是Sparx Systems的Enterprise Architect,版本要求7.5及以上。本指南专注于建模技术而非工具,使用UML概念进行描述。
2. BSW UML模型结构
2.1 模型根结构
AUTOSAR BSW UML模型采用分层包结构组织,主要包含四个核心包:
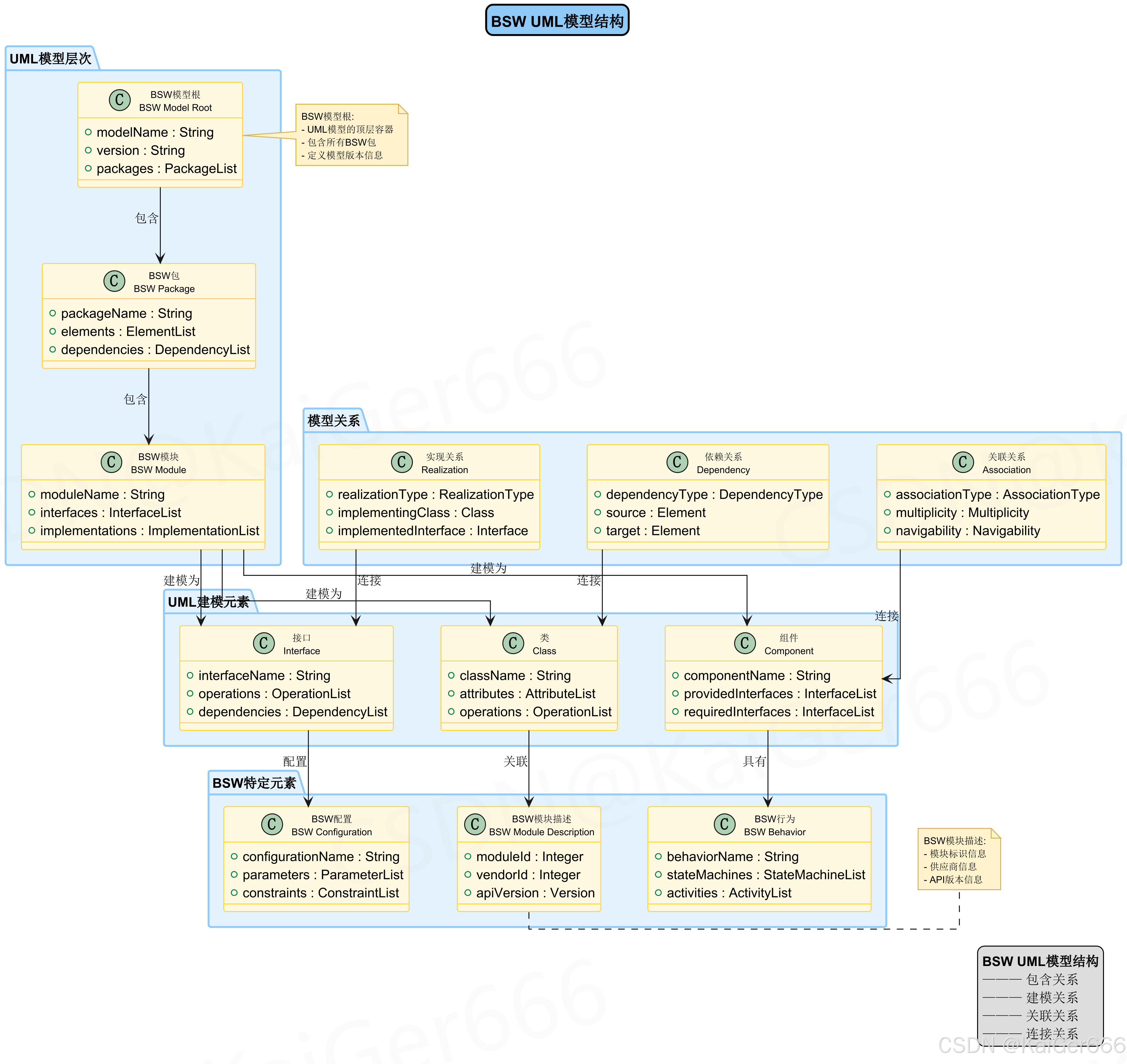
BSW UML模型结构图:展示了AUTOSAR BSW UML模型的整体架构和包组织方式
2.1.1 ReadMe包
职责:提供模型的基础信息和版本管理
- 版本信息:记录模型的版本号和发布信息
- 已知限制:列出当前版本的限制和已知问题
- 免责声明:包含法律声明和使用条款
2.1.2 交互视图包
职责:管理模块间的交互序列图
- 序列图集合:包含不同模块间交互的序列图
- 垂直排列:按堆栈层次垂直组织序列图
- 交互规范:定义标准化的交互模式和流程
2.1.3 软件包
职责:定义BSW模块的核心内容
- BSW模块定义:包含所有BSW模块的定义,按层次水平排列
- 接口定义:定义模块提供的接口和依赖的接口
- 类型定义:定义模块使用的数据类型和结构
- 状态图:描述模块的状态机和行为
- 头文件图:展示模块的文件包含结构
2.1.4 通用元素包
职责:提供可重用的通用定义
- 通用接口定义:定义跨模块使用的标准接口
- 可配置回调定义:定义可配置的回调函数接口
- 标准类型:定义AUTOSAR标准数据类型
2.2 包依赖关系
模型中的包之间存在明确的依赖关系:
- ReadMe包 → 交互视图包:提供基础信息支持
- 交互视图包 → 软件包:展示模块间的交互
- 软件包 → 通用元素包:使用通用定义
- 通用元素包 → 软件包:被模块引用
3. BSW模块建模
3.1 模块组件结构
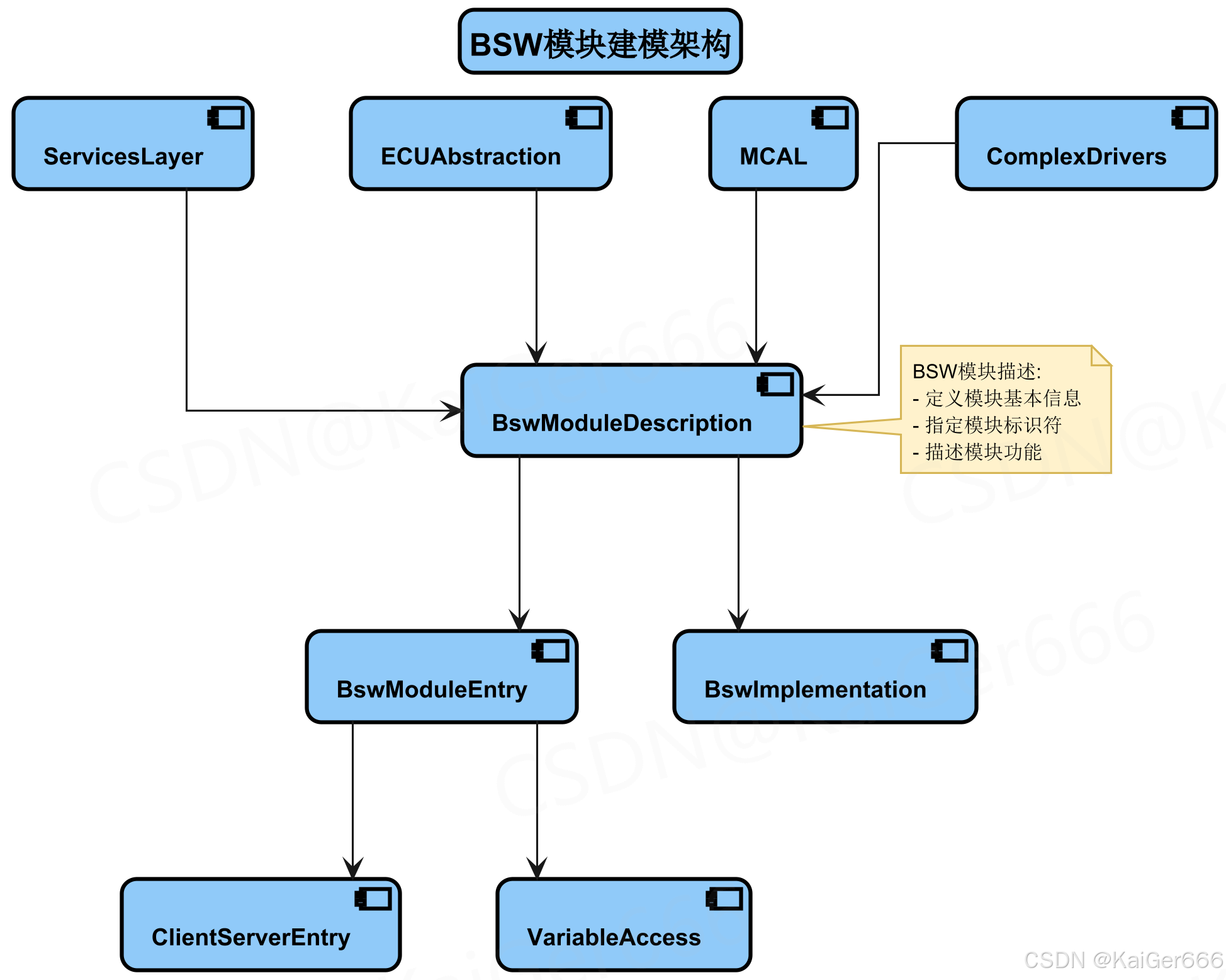
BSW模块建模结构图:展示了BSW模块的建模规则和组件关系
3.1.1 BSW模块组件
职责:表示AUTOSAR基础软件模块
- 构造型 :使用
<<module>>构造型标识 - 命名规则:使用模块缩写作为组件名称
- 标签值 :包含
bsw.moduleId标签值,指定模块ID - 位置:作为模块包的顶级元素
3.1.2 函数接口
职责:定义模块提供的API函数
- 命名规则:接口名称与实际函数名相同
- 构造型 :使用
<<interface>>构造型 - 关系 :模块通过
<<realize>>关系实现接口 - 内容:包含API函数的详细定义
3.1.3 虚拟接口
职责:合并多个API函数,简化模块依赖
- 命名格式 :
<依赖模块>_<提供模块>_<关系类型> - 支持递归:允许虚拟接口继承其他虚拟接口
- 依赖关系 :使用
<<mandatory>>和<<optional>>关系
3.1.4 回调接口
职责:定义上层模块实现的回调函数
- 构造型 :使用
<<callback>>构造型 - 调用方向:下层模块调用上层模块的回调
- 实现关系 :上层模块通过
<<realize>>关系实现回调
3.1.5 组件图和类型图
组件图:
- 命名:与模块组件名称相同
- 内容:包含模块组件和所有接口关系
- 用途:展示模块的架构和接口
类型图:
- 命名 :
<模块缩写> Types - 内容:包含模块定义的所有数据类型
- 用途:展示模块的数据结构
3.2 模块建模代码示例
c
/* BSW模块组件定义示例 */
typedef struct {
uint8 moduleId; /* 模块标识符 */
boolean moduleEnabled; /* 模块启用状态 */
uint8 maxInstances; /* 最大实例数量 */
Std_VersionInfoType versionInfo; /* 版本信息 */
} BSW_Module_ConfigType;
/* 函数接口定义示例 */
Std_ReturnType Module_Init(const BSW_Module_ConfigType* ConfigPtr);
Std_ReturnType Module_ServiceRequest(uint8 ServiceId);
Std_ReturnType Module_ServiceRelease(uint8 ServiceId);
Module_StateType Module_GetState(uint8 InstanceId, Module_StateType* StatePtr);
/* 回调接口定义示例 */
void Module_CallbackNotification(uint8 InstanceId, uint8 EventType);
void Module_ErrorIndication(uint8 InstanceId, uint8 ErrorCode);
/* 虚拟接口使用示例 */
/* 依赖模块通过虚拟接口访问提供模块的服务 */
Std_ReturnType DependentModule_RequestService(uint8 ServiceId)
{
/* 通过虚拟接口调用提供模块的服务 */
return ProviderModule_ServiceRequest(ServiceId);
}4. API函数建模
4.1 API函数结构

API函数建模结构图:展示了API函数的建模规则和参数结构
4.1.1 函数接口
职责:定义模块提供的函数接口
- 命名规则:接口名称与实际函数名相同
- 构造型 :使用
<<interface>>构造型 - 内容:包含函数名和接口类型信息
4.1.2 API函数操作
职责:定义具体的API函数
- 命名规则 :
<模块缩写>_<函数名> - 构造型 :支持多种构造型
<<function>>:普通函数<<scheduled_function>>:定时函数<<callback>>:回调函数
- 标签值 :
ServiceID:服务标识符(十六进制)Reentrant:可重入性(Reentrant/Non Reentrant/Conditionally Reentrant)Synchronous:同步性(Synchronous/Asynchronous)bsw.swsItemId:SWS项目IDbsw.traceRefs:需求追踪引用bsw.headerFile:头文件引用
4.1.3 函数参数
职责:定义函数的输入输出参数
- 必需属性:名称、类型、方向、描述
- 参数方向 :
in:输入参数out:输出参数(必须为指针类型)inout:输入输出参数(必须为指针类型)return:返回参数
- 构造型 :
<<optional>>:可选参数<<multiple>>:多重参数<<mutualexcl>>:互斥参数
4.1.4 返回参数
职责:定义函数的返回值
- 参数名 :
return - 方向 :
return - 位置:必须是第一个参数
- 描述:说明可能的返回值
4.1.5 特殊函数类型
定时函数:
- 构造型 :
<<scheduled_function>> - 用途:周期性执行的函数
- 特点:由操作系统调度执行
回调函数:
- 构造型 :
<<callback>> - 用途:上层模块实现的回调
- 特点:由下层模块调用
4.2 API函数建模代码示例
c
/* API函数接口定义示例 */
typedef struct {
uint8 serviceId; /* 服务标识符 */
uint8 instanceId; /* 实例标识符 */
uint32 timeout; /* 超时时间 */
boolean reentrant; /* 可重入标志 */
boolean synchronous; /* 同步标志 */
} API_Function_ConfigType;
/* 普通API函数示例 */
Std_ReturnType Module_Init(const Module_ConfigType* ConfigPtr)
{
/* 函数实现 */
if (ConfigPtr == NULL) {
return E_NOT_OK;
}
/* 初始化逻辑 */
Module_Internal_Initialize(ConfigPtr);
return E_OK;
}
/* 定时函数示例 */
void Module_MainFunction(void)
{
uint8 channel;
/* 周期性处理所有通道 */
for (channel = 0; channel < MODULE_NUMBER_OF_CHANNELS; channel++) {
Module_Internal_ProcessChannel(channel);
}
}
/* 回调函数示例 */
void Module_CallbackNotification(uint8 InstanceId, uint8 EventType)
{
/* 回调实现 */
switch (EventType) {
case MODULE_EVENT_DATA_READY:
/* 处理数据就绪事件 */
break;
case MODULE_EVENT_ERROR:
/* 处理错误事件 */
break;
default:
/* 处理其他事件 */
break;
}
}
/* 参数定义示例 */
Std_ReturnType Module_ProcessData(
uint8* DataPtr, /* in: 输入数据指针 */
uint32 DataLength, /* in: 数据长度 */
uint8* ResultPtr, /* out: 结果数据指针 */
uint32* ResultLengthPtr /* out: 结果长度指针 */
);
/* 互斥参数示例 */
Std_ReturnType Module_TransformData(
uint8* DataPtr, /* inout/out: 数据缓冲区 */
uint32 DataLength /* in: 数据长度 */
);5. 模块依赖关系
5.1 依赖关系结构
在这里插入图片描述
模块依赖关系图:展示了BSW模块间的依赖关系和接口类型
5.1.1 上层模块
职责:依赖下层模块的接口
- 依赖类型 :使用
<<mandatory>>和<<optional>>关系 - 接口实现:实现回调接口供下层模块调用
- 服务使用:使用下层模块提供的服务接口
5.1.2 下层模块
职责:提供函数接口给上层模块
- 接口提供 :通过
<<realize>>关系提供函数接口 - 回调调用:调用上层模块实现的回调接口
- 配置依赖 :使用
<<configurable>>关系配置回调
5.1.3 强制虚拟接口
职责:合并多个强制依赖
- 命名格式 :
<依赖模块>_<提供模块>_Mandatory - 关系类型 :
<<mandatory>> - 特点:必须实现,模块正常工作必需
5.1.4 可选虚拟接口
职责:合并多个可选依赖
- 命名格式 :
<依赖模块>_<提供模块>_Optional - 关系类型 :
<<optional>> - 特点:可选择实现,增强功能可选
5.1.5 回调接口
职责:上层模块实现的回调函数
- 调用方向:下层模块调用上层模块
- 配置关系 :使用
<<configurable>>关系 - 实现关系 :上层模块通过
<<realize>>关系实现
5.1.6 通用接口
职责:提供标准化的接口定义
- 继承关系:自定义接口继承通用接口定义
- 命名配置:通过标签值配置命名模式
- 使用方式:模块通过依赖关系使用自定义接口
5.2 依赖关系代码示例
c
/* 强制依赖示例 */
/* 上层模块依赖下层模块的强制接口 */
Std_ReturnType UpperModule_RequestService(uint8 ServiceId)
{
/* 通过强制虚拟接口调用下层模块服务 */
return LowerModule_ServiceRequest(ServiceId);
}
/* 可选依赖示例 */
/* 上层模块可选择使用下层模块的可选功能 */
Std_ReturnType UpperModule_OptionalFeature(void)
{
#ifdef LOWER_MODULE_OPTIONAL_FEATURE_ENABLED
/* 使用可选功能 */
return LowerModule_OptionalService();
#else
/* 可选功能未启用时的处理 */
return E_NOT_OK;
#endif
}
/* 回调接口示例 */
/* 上层模块实现回调接口 */
void UpperModule_CallbackNotification(uint8 InstanceId, uint8 EventType)
{
/* 处理来自下层模块的通知 */
switch (EventType) {
case LOWER_MODULE_EVENT_DATA_READY:
UpperModule_ProcessData(InstanceId);
break;
case LOWER_MODULE_EVENT_ERROR:
UpperModule_HandleError(InstanceId);
break;
}
}
/* 下层模块调用回调 */
void LowerModule_NotifyUpperLayer(uint8 InstanceId, uint8 EventType)
{
/* 调用上层模块的回调函数 */
if (UpperModule_CallbackNotification != NULL) {
UpperModule_CallbackNotification(InstanceId, EventType);
}
}
/* 通用接口使用示例 */
/* 自定义接口继承通用接口定义 */
typedef struct {
uint8 interfaceId; /* 接口标识符 */
uint8 version; /* 接口版本 */
void* functionTable; /* 函数表指针 */
} Custom_InterfaceType;
/* 模块使用自定义接口 */
Std_ReturnType Module_UseCustomInterface(const Custom_InterfaceType* InterfacePtr)
{
if (InterfacePtr == NULL) {
return E_NOT_OK;
}
/* 使用自定义接口 */
return InterfacePtr->functionTable->serviceFunction();
}5. 模块依赖关系
5.1 依赖关系结构
模块依赖关系图:展示了BSW模块间的依赖关系和接口类型
5.1.1 上层模块
职责:依赖下层模块的接口
- 依赖类型 :使用
<<mandatory>>和<<optional>>关系 - 接口实现:实现回调接口供下层模块调用
- 服务使用:使用下层模块提供的服务接口
5.1.2 下层模块
职责:提供函数接口给上层模块
- 接口提供 :通过
<<realize>>关系提供函数接口 - 回调调用:调用上层模块实现的回调接口
- 配置依赖 :使用
<<configurable>>关系配置回调
5.1.3 强制虚拟接口
职责:合并多个强制依赖
- 命名格式 :
<依赖模块>_<提供模块>_Mandatory - 关系类型 :
<<mandatory>> - 特点:必须实现,模块正常工作必需
5.1.4 可选虚拟接口
职责:合并多个可选依赖
- 命名格式 :
<依赖模块>_<提供模块>_Optional - 关系类型 :
<<optional>> - 特点:可选择实现,增强功能可选
5.1.5 回调接口
职责:上层模块实现的回调函数
- 调用方向:下层模块调用上层模块
- 配置关系 :使用
<<configurable>>关系 - 实现关系 :上层模块通过
<<realize>>关系实现
5.1.6 通用接口
职责:提供标准化的接口定义
- 继承关系:自定义接口继承通用接口定义
- 命名配置:通过标签值配置命名模式
- 使用方式:模块通过依赖关系使用自定义接口
5.2 依赖关系代码示例
c
/* 强制依赖示例 */
/* 上层模块依赖下层模块的强制接口 */
Std_ReturnType UpperModule_RequestService(uint8 ServiceId)
{
/* 通过强制虚拟接口调用下层模块服务 */
return LowerModule_ServiceRequest(ServiceId);
}
/* 可选依赖示例 */
/* 上层模块可选择使用下层模块的可选功能 */
Std_ReturnType UpperModule_OptionalFeature(void)
{
#ifdef LOWER_MODULE_OPTIONAL_FEATURE_ENABLED
/* 使用可选功能 */
return LowerModule_OptionalService();
#else
/* 可选功能未启用时的处理 */
return E_NOT_OK;
#endif
}
/* 回调接口示例 */
/* 上层模块实现回调接口 */
void UpperModule_CallbackNotification(uint8 InstanceId, uint8 EventType)
{
/* 处理来自下层模块的通知 */
switch (EventType) {
case LOWER_MODULE_EVENT_DATA_READY:
UpperModule_ProcessData(InstanceId);
break;
case LOWER_MODULE_EVENT_ERROR:
UpperModule_HandleError(InstanceId);
break;
}
}
/* 下层模块调用回调 */
void LowerModule_NotifyUpperLayer(uint8 InstanceId, uint8 EventType)
{
/* 调用上层模块的回调函数 */
if (UpperModule_CallbackNotification != NULL) {
UpperModule_CallbackNotification(InstanceId, EventType);
}
}
/* 通用接口使用示例 */
/* 自定义接口继承通用接口定义 */
typedef struct {
uint8 interfaceId; /* 接口标识符 */
uint8 version; /* 接口版本 */
void* functionTable; /* 函数表指针 */
} Custom_InterfaceType;
/* 模块使用自定义接口 */
Std_ReturnType Module_UseCustomInterface(const Custom_InterfaceType* InterfacePtr)
{
if (InterfacePtr == NULL) {
return E_NOT_OK;
}
/* 使用自定义接口 */
return InterfacePtr->functionTable->serviceFunction();
}6. 数据类型建模
6.1 数据类型结构
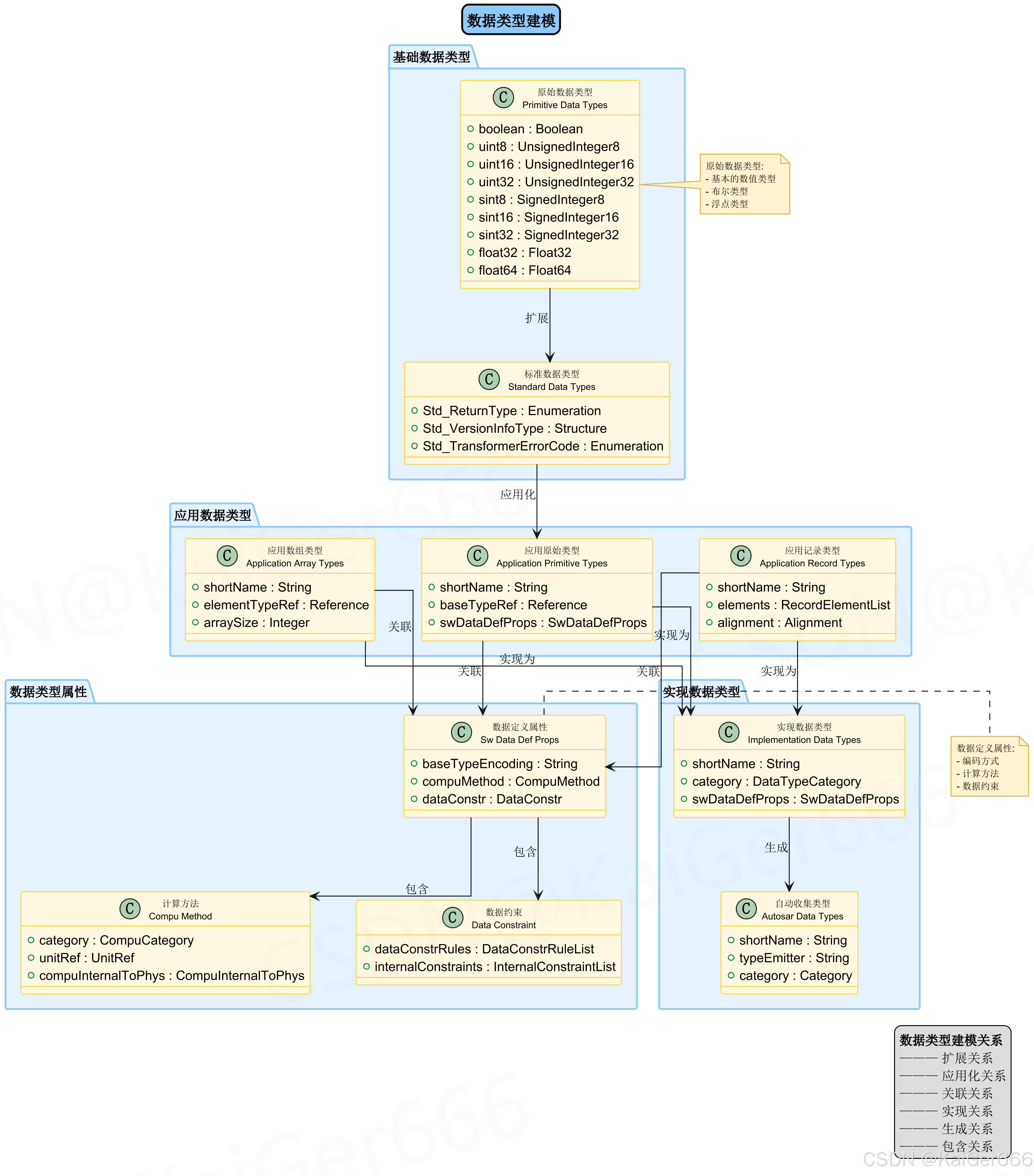
数据类型建模结构图:展示了AUTOSAR中各种数据类型的建模规则
6.1.1 简单类型
职责:定义基本数据类型
- 基础类型:基于标准C类型(uint8, uint16, uint32, sint8, sint16, sint32)
- AUTOSAR标准:支持AUTOSAR标准类型定义
- 用途:用于基本数据类型定义和参数传递
6.1.2 枚举类型
职责:定义有限值集合的类型
- 值集合:定义有限的有效值集合
- 可读性:提高代码可读性和维护性
- 用途:支持状态定义和选项配置
6.1.3 结构体类型
职责:组合多个相关数据
- 成员列表:包含多个相关数据成员
- 嵌套支持:支持嵌套结构体定义
- 用途:用于复杂数据类型的定义
6.1.4 位域类型
职责:定义位级别的数据结构
- 位域定义:定义具体的位域范围和含义
- 内存优化:节省内存空间
- 用途:用于寄存器映射和紧凑数据存储
6.1.5 Std_ReturnType扩展
职责:扩展标准返回类型
- 扩展值:定义模块特定的返回值
- 标准化:保持与AUTOSAR标准的兼容性
- 用途:提供模块特定的错误码和状态
6.1.6 可变性建模
职责:支持配置可变性
- 可变性类型 :
<<optional>>:可选元素<<multiple>>:多重元素<<mutualexcl>>:互斥元素
- 配置条件:定义元素出现的配置条件
- 用途:支持灵活的配置选项
6.2 数据类型建模代码示例
c
/* 简单类型定义示例 */
typedef uint8 Module_InstanceIdType; /* 模块实例ID类型 */
typedef uint16 Module_ChannelIdType; /* 模块通道ID类型 */
typedef uint32 Module_TimeoutType; /* 超时时间类型 */
/* 枚举类型定义示例 */
typedef enum {
MODULE_STATE_UNINIT = 0, /* 未初始化状态 */
MODULE_STATE_IDLE, /* 空闲状态 */
MODULE_STATE_ACTIVE, /* 活动状态 */
MODULE_STATE_ERROR /* 错误状态 */
} Module_StateType;
typedef enum {
MODULE_MODE_NORMAL = 0, /* 正常模式 */
MODULE_MODE_DEBUG, /* 调试模式 */
MODULE_MODE_TEST /* 测试模式 */
} Module_ModeType;
/* 结构体类型定义示例 */
typedef struct {
uint8 instanceId; /* 实例标识符 */
Module_StateType state; /* 当前状态 */
Module_ModeType mode; /* 操作模式 */
uint32 uptime; /* 运行时间 */
} Module_InstanceType;
typedef struct {
uint8 channelId; /* 通道标识符 */
uint16 dataLength; /* 数据长度 */
uint8* dataPtr; /* 数据指针 */
boolean dataValid; /* 数据有效标志 */
} Module_ChannelType;
/* 位域类型定义示例 */
typedef struct {
uint8 status; /* 状态寄存器 */
struct {
uint8 ready : 1; /* 就绪位 */
uint8 busy : 1; /* 忙位 */
uint8 error : 1; /* 错误位 */
uint8 reserved : 5; /* 保留位 */
} bits;
} Module_StatusType;
/* Std_ReturnType扩展示例 */
typedef enum {
MODULE_E_OK = 0, /* 操作成功 */
MODULE_E_NOT_OK, /* 操作失败 */
MODULE_E_NOT_INITIALIZED, /* 模块未初始化 */
MODULE_E_INVALID_PARAM, /* 参数无效 */
MODULE_E_TIMEOUT, /* 操作超时 */
MODULE_E_BUSY /* 模块忙 */
} Module_ReturnType;
/* 可变性建模示例 */
typedef struct {
Module_ConfigType baseConfig; /* 基础配置 */
#ifdef MODULE_OPTIONAL_FEATURE_ENABLED
Module_OptionalConfigType optionalConfig; /* 可选配置 */
#endif
#ifdef MODULE_MULTIPLE_CHANNELS_ENABLED
Module_ChannelConfigType channelConfigs[MODULE_MAX_CHANNELS]; /* 多重通道配置 */
#endif
#ifdef MODULE_MODE_A_ENABLED
Module_ModeAConfigType modeAConfig; /* 模式A配置 */
#elif defined(MODULE_MODE_B_ENABLED)
Module_ModeBConfigType modeBConfig; /* 模式B配置 */
#endif
} Module_VariableConfigType;
/* 数据类型使用示例 */
Std_ReturnType Module_Initialize(const Module_ConfigType* ConfigPtr)
{
Module_InstanceType* instance;
if (ConfigPtr == NULL) {
return MODULE_E_INVALID_PARAM;
}
/* 创建模块实例 */
instance = Module_Internal_CreateInstance();
if (instance == NULL) {
return MODULE_E_NOT_OK;
}
/* 初始化实例 */
instance->instanceId = ConfigPtr->instanceId;
instance->state = MODULE_STATE_IDLE;
instance->mode = ConfigPtr->mode;
instance->uptime = 0;
return MODULE_E_OK;
}
/* 位域操作示例 */
void Module_UpdateStatus(Module_StatusType* status, boolean ready, boolean busy, boolean error)
{
if (status == NULL) {
return;
}
/* 更新位域 */
status->bits.ready = ready ? 1 : 0;
status->bits.busy = busy ? 1 : 0;
status->bits.error = error ? 1 : 0;
/* 更新状态寄存器 */
status->status = (ready << 0) | (busy << 1) | (error << 2);
}7. 服务建模
7.1 服务建模结构
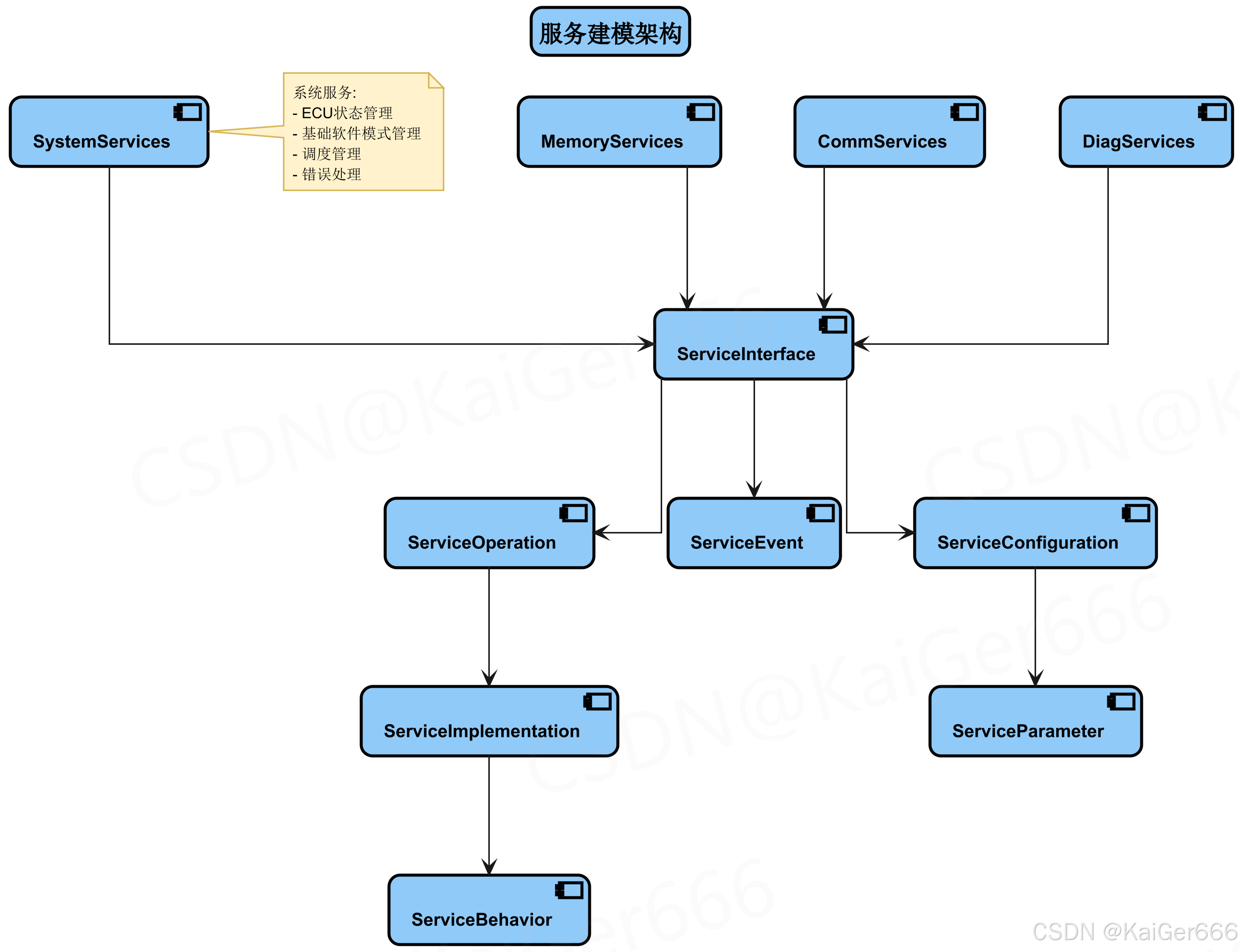
服务建模结构图:展示了AUTOSAR服务接口的建模规则
7.1.1 AUTOSAR服务
职责:提供标准化的服务接口
- 服务层:属于AUTOSAR服务层
- 标准化:提供标准化接口定义
- 软件组件模板:基于软件组件模板而非C语言接口
7.1.2 客户端-服务器接口
职责:提供同步调用模式
- 调用模式:同步调用,请求-响应模式
- 适用场景:适用于服务调用和函数调用
- 特点:客户端等待服务器响应
7.1.3 发送者-接收者接口
职责:提供异步通信模式
- 通信模式:异步通信,数据传递模式
- 适用场景:适用于事件通知和数据传递
- 特点:发送者不等待接收者响应
7.1.4 模式切换接口
职责:提供模式管理功能
- 管理功能:模式管理,状态转换控制
- 适用场景:适用于系统模式管理
- 特点:支持系统状态的动态切换
7.1.5 特殊类型
职责:增强接口表达能力
- 复杂数据结构:支持服务接口中的复杂数据类型
- 增强功能:增强接口的表达能力和灵活性
- 标准化:提供标准化的特殊类型定义
7.1.6 服务接口可变性
职责:支持配置选项
- 配置选项:支持接口的配置和定制
- 灵活性:允许接口根据需求进行调整
- 标准化:保持配置的标准化和一致性
7.2 服务建模代码示例
c
/* AUTOSAR服务接口定义示例 */
typedef struct {
uint8 serviceId; /* 服务标识符 */
uint8 interfaceId; /* 接口标识符 */
uint8 version; /* 接口版本 */
boolean enabled; /* 接口启用状态 */
} AUTOSAR_ServiceInterfaceType;
/* 客户端-服务器接口示例 */
typedef struct {
uint8 requestId; /* 请求标识符 */
uint8 serviceId; /* 服务标识符 */
uint32 timeout; /* 超时时间 */
void* requestData; /* 请求数据 */
uint16 requestLength; /* 请求数据长度 */
} ClientServer_RequestType;
typedef struct {
uint8 requestId; /* 请求标识符 */
uint8 resultCode; /* 结果代码 */
void* responseData; /* 响应数据 */
uint16 responseLength; /* 响应数据长度 */
} ClientServer_ResponseType;
/* 发送者-接收者接口示例 */
typedef struct {
uint8 senderId; /* 发送者标识符 */
uint8 messageId; /* 消息标识符 */
uint32 timestamp; /* 时间戳 */
void* messageData; /* 消息数据 */
uint16 messageLength; /* 消息长度 */
} SenderReceiver_MessageType;
/* 模式切换接口示例 */
typedef struct {
uint8 currentMode; /* 当前模式 */
uint8 targetMode; /* 目标模式 */
uint32 transitionTimeout; /* 切换超时时间 */
boolean immediateTransition; /* 立即切换标志 */
} ModeSwitch_RequestType;
/* 服务接口实现示例 */
/* 客户端-服务器服务实现 */
Std_ReturnType Service_ClientServerRequest(const ClientServer_RequestType* request,
ClientServer_ResponseType* response)
{
if (request == NULL || response == NULL) {
return E_NOT_OK;
}
/* 处理服务请求 */
switch (request->serviceId) {
case SERVICE_ID_DATA_PROCESSING:
return Service_ProcessData(request, response);
case SERVICE_ID_CONFIGURATION:
return Service_Configure(request, response);
default:
response->resultCode = SERVICE_E_UNKNOWN_SERVICE;
return E_NOT_OK;
}
}
/* 发送者-接收者服务实现 */
void Service_SendMessage(const SenderReceiver_MessageType* message)
{
if (message == NULL) {
return;
}
/* 发送消息到接收者 */
Service_Internal_DeliverMessage(message);
}
/* 模式切换服务实现 */
Std_ReturnType Service_ModeSwitch(const ModeSwitch_RequestType* request)
{
if (request == NULL) {
return E_NOT_OK;
}
/* 验证模式切换请求 */
if (!Service_Internal_IsValidModeTransition(request->currentMode, request->targetMode)) {
return E_NOT_OK;
}
/* 执行模式切换 */
return Service_Internal_ExecuteModeTransition(request);
}
/* 特殊类型使用示例 */
typedef struct {
uint8 typeId; /* 类型标识符 */
uint16 dataSize; /* 数据大小 */
uint8* dataPtr; /* 数据指针 */
uint32 checksum; /* 校验和 */
} Special_DataType;
/* 服务接口配置示例 */
typedef struct {
AUTOSAR_ServiceInterfaceType baseInterface; /* 基础接口 */
/* 客户端-服务器配置 */
uint16 maxConcurrentRequests; /* 最大并发请求数 */
uint32 defaultTimeout; /* 默认超时时间 */
/* 发送者-接收者配置 */
uint16 messageQueueSize; /* 消息队列大小 */
boolean enableTimestamp; /* 启用时间戳 */
/* 模式切换配置 */
uint8 supportedModes; /* 支持的模式 */
uint32 transitionDelay; /* 切换延迟 */
} Service_ConfigType;
/* 服务初始化示例 */
Std_ReturnType Service_Initialize(const Service_ConfigType* config)
{
if (config == NULL) {
return E_NOT_OK;
}
/* 初始化基础接口 */
Service_Internal_InitInterface(&config->baseInterface);
/* 初始化客户端-服务器服务 */
Service_Internal_InitClientServer(config->maxConcurrentRequests,
config->defaultTimeout);
/* 初始化发送者-接收者服务 */
Service_Internal_InitSenderReceiver(config->messageQueueSize,
config->enableTimestamp);
/* 初始化模式切换服务 */
Service_Internal_InitModeSwitch(config->supportedModes,
config->transitionDelay);
return E_OK;
}8. 总结
8.1 建模优势
AUTOSAR BSW UML建模方法具有以下显著优势:
- 文档同步性:确保99+个文档在结构、接口、序列图等方面保持同步
- 自动化生成:通过MMT工具自动生成SWS文档,减少人工错误
- 标准化规范:提供统一的建模规则和最佳实践
- 可维护性:清晰的模型结构便于维护和更新
- 可扩展性:支持新模块和功能的扩展
8.2 应用场景
BSW UML建模适用于以下场景:
- AUTOSAR标准开发:符合AUTOSAR标准的软件开发
- 汽车电子系统:汽车电子控制单元(ECU)的软件开发
- 嵌入式系统:需要标准化接口的嵌入式系统开发
- 模块化设计:需要清晰模块边界和接口定义的系统设计
- 文档管理:需要自动化文档生成的项目管理
8.3 最佳实践
在实施BSW UML建模时,应遵循以下最佳实践:
- 严格遵循规范:严格按照AUTOSAR建模规范进行设计
- 保持一致性:确保模型元素命名和关系的一致性
- 文档完整性:为所有重要元素提供完整的文档说明
- 版本控制:对模型进行版本控制,记录变更历史
- 工具集成:与开发工具链集成,实现自动化流程
通过遵循本指南的建模方法和最佳实践,可以建立高质量的AUTOSAR BSW UML模型,为汽车电子系统的开发提供可靠的基础。