基于 Arduino 主板的扫地机器人避障设计:从原理到细节实现
在智能家居设备快速发展的当下,扫地机器人凭借自动化清扫能力成为家庭必备品。基于 Arduino 主板设计的扫地机器人,以开源、低成本、易扩展的特点,成为机器人爱好者和学生实践的热门选择。本文聚焦这类扫地机器人的避障功能,从设计原理出发,详细阐述硬件选型、机械结构、电路连接、程序设计及调试优化等关键细节,为相关设计提供完整参考。
一、设计原理:Arduino 主控下的避障逻辑框架
基于 Arduino 主板的扫地机器人避障设计,核心是通过 "传感器感知 - 主板决策 - 执行器动作" 的闭环逻辑实现障碍物规避。与纯机械避障依赖物理碰撞不同,该设计通过电子传感器主动检测障碍物距离,由 Arduino 主板根据预设程序计算转向策略,再控制电机驱动轮完成避障动作,具有响应更快、转向更精准的优势。
具体流程为:超声波传感器或红外传感器实时向机身前方发射信号并接收反射波,将距离信息转化为电信号传输至 Arduino 主板;主板通过程序判断 "当前距离是否小于安全阈值(如 15cm)",若触发阈值则输出控制指令,使左右驱动轮产生转速差(如左轮停转、右轮正转),带动机身转向避开障碍物,转向完成后恢复直线行驶。
二、硬件选型与参数细节
1. 核心控制模块
- Arduino 主板:选用 Arduino Uno R3(价格约 30 元),其 ATmega328P 芯片具备 14 个数字输入 / 输出引脚(含 6 个 PWM 输出),足以满足传感器数据读取和电机控制需求;支持 USB 供电和外部电源输入,兼容性强,适合新手编程调试。
- 扩展板:搭配 L298N 电机驱动模块(价格约 10 元),该模块可通过 PWM 信号控制 2 路直流电机的转速和转向,最大输出电流 2A,能匹配扫地机器人常用的 6-12V 直流电机。
2. 避障传感器
- 超声波传感器(HC-SR04):作为主要避障检测元件,选用 HC-SR04(价格约 5 元),其检测距离范围 2-400cm,精度可达 0.3cm,响应时间短(≤30ms);需连接 Arduino 的 2 个数字引脚(Trig 触发端、Echo 接收端),通过发射 40kHz 超声波并计算回波时间得出障碍物距离。
- 辅助传感器(可选):在机身两侧加装 2 个红外接近传感器(如 GP2Y0A21YK,价格约 8 元),检测距离 10-80cm,用于补充检测侧方障碍物,避免机身贴墙或卡入家具缝隙。
3. 动力与移动系统
- 驱动电机:选用 2 个 6V 直流减速电机(转速 150-200rpm,价格约 12 元 / 个),带编码器(可选,用于精准控制转速),输出扭矩≥5kg・cm,确保机身在地毯等稍复杂地面不打滑;电机轴通过联轴器与驱动轮连接,传动效率≥90%。
- 轮子与支撑:驱动轮选用直径 6cm 的橡胶轮(宽度 1.5cm,增加摩擦力),前轮采用 1 个 3cm 万向轮(带滚珠轴承,转向阻力≤0.5N),形成 "两驱一轮" 的三点支撑结构,机身重心落在驱动轮中轴线与万向轮连线的交点处,保证行驶稳定性。
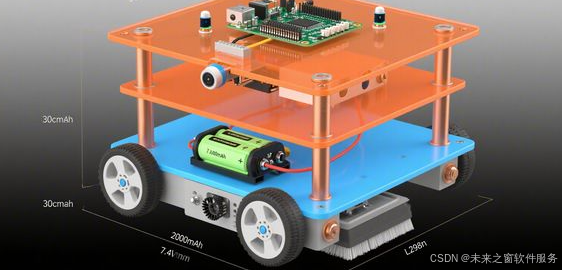
4. 供电与辅助部件
- 电源:采用 7.4V 锂电池组(容量 2000mAh,价格约 30 元),通过 DC-DC 降压模块输出 5V 给 Arduino 和传感器供电,直接输出 7.4V 给电机驱动模块;续航时间≥1.5 小时,满足家庭基础清扫需求。
- 吸尘组件:选用 1 个 3V 微型风扇(风量≥0.5m³/h),安装在机身底部前端,搭配 100ml 储尘盒(带 HEPA 滤网),吸风口高度 1-2mm,通过 Arduino 数字引脚控制开关,与移动动作同步启动。
三、机械结构设计细节
1. 机身框架
采用 3mm 厚亚克力板切割为 "长方形底盘"(尺寸 30cm×20cm),重量≤300g,通过 M3 螺丝固定各部件。底盘分为三层:底层安装驱动轮、万向轮和吸尘组件,中层固定电机、电池和驱动模块,顶层放置 Arduino 主板和传感器,层间用 4 根 10cm 高铜柱支撑,预留导线穿孔(直径 5mm)。
2. 传感器安装位置
- 超声波传感器通过支架固定在机身前端中心,距离地面 10cm(避免检测地面杂物误判),探测方向与地面平行,水平探测角度≤15°(减少旁瓣干扰)。
- 侧方红外传感器安装在机身两侧中部,距离前端 5cm 位置,探测方向与机身垂直,确保检测侧方 10-30cm 范围的障碍物。
3. 重心与平衡设计
电池安装在底盘尾部(占总重量 40%),Arduino 主板和传感器安装在中部(占 30%),驱动轮和吸尘组件占 30%;测试时将机身放在倾斜 15° 的平面,需能自行回正,无侧翻或滑动现象。
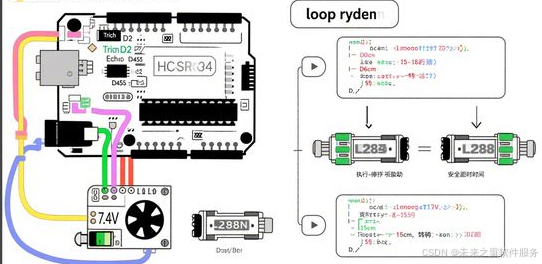
四、电路连接与程序设计
1. 电路接线细节
- 传感器与 Arduino 连接:HC-SR04 的 Trig 接 D2 引脚、Echo 接 D3 引脚;红外传感器的 OUT 端分别接 D4(左侧)、D5(右侧)引脚,VCC 接 5V,GND 接公共地。
- 电机驱动模块连接:L298N 的 IN1、IN2 接 D6、D7 引脚(控制左电机),IN3、IN4 接 D8、D9 引脚(控制右电机);12V 电源输入端接锂电池,GND 与 Arduino 共地;电机输出端分别连接左右电机。
- 吸尘风扇连接:风扇正极接 D10 引脚,负极接 GND,通过三极管(SS8050)控制开关,避免主板直接供电过载。
2. 核心程序逻辑(基于 Arduino IDE)
// 定义引脚
#define Trig 2
#define Echo 3
#define LeftIR 4
#define RightIR 5
#define LeftMotor1 6
#define LeftMotor2 7
#define RightMotor1 8
#define RightMotor2 9
#define Fan 10
// 变量初始化
int distance; // 前方距离
int safeDist = 15; // 安全距离15cm
void setup() {
// 初始化引脚模式
pinMode(Trig, OUTPUT);
pinMode(Echo, INPUT);
pinMode(LeftIR, INPUT);
pinMode(RightIR, INPUT);
pinMode(LeftMotor1, OUTPUT);
pinMode(LeftMotor2, OUTPUT);
pinMode(RightMotor1, OUTPUT);
pinMode(RightMotor2, OUTPUT);
}程序核心功能:通过getDistance()函数实时计算前方距离,结合红外传感器信号判断障碍物位置;当检测到障碍物时,调用stop()、turnLeft()或turnRight()函数控制电机动作,转向时间根据机身尺寸设定(1000ms 约转向 90°),确保避开障碍物后恢复前进。
五、调试与优化要点
1. 传感器校准
- 超声波传感器需在无障碍物环境下测试,确保输出距离稳定(误差≤1cm);若存在漂移,可在程序中增加多次测量取平均值的代码(如for(i=0;i<5;i++){distance+=getDistance();}distance/=5;)。
- 红外传感器需调整检测阈值,通过电位器将触发距离校准为 10cm,避免误检测地面或墙壁纹理。
2. 电机同步性调整
- 若机身直行时跑偏,可在forward()函数中通过 PWM 信号微调电机转速(如analogWrite(LeftMotor1, 200);analogWrite(RightMotor1, 220);),补偿电机性能差异。
- 转向角度需通过实际测试优化,例如在空旷地面标记起点,让机身转向后测量偏转角度,调整delay()函数的时间参数(每增加 100ms 约增加转向 10°)。
3. 功耗优化
- 非工作状态下关闭风扇(digitalWrite(Fan, LOW);),通过外部按键触发启动;电机驱动模块可增加散热片,避免长时间工作过热。
六、设计总结
基于 Arduino 主板的扫地机器人避障设计,通过 "传感器 + 主控板 + 执行器" 的协同工作,实现了比纯机械结构更智能的避障效果。其核心优势在于:硬件成本可控(总成本约 150-200 元),程序开源可二次开发(支持添加路径规划、远程控制等功能),机械结构模块化便于组装调试。
在实际应用中,可根据需求进一步优化:例如增加陀螺仪模块实现精准转向角度控制,或通过蓝牙模块连接手机 APP 调整安全距离参数。这种设计不仅适合作为毕业设计、创客项目,更能帮助理解嵌入式系统、传感器应用和自动控制的核心原理,为更复杂的机器人设计奠定基础。
阿雪技术观
在科技发展浪潮中,我们不妨积极投身技术共享。不满足于做受益者,更要主动担当贡献者。无论是分享代码、撰写技术博客,还是参与开源项目维护改进,每一个微小举动都可能蕴含推动技术进步的巨大能量。东方仙盟是汇聚力量的天地,我们携手在此探索硅基生命,为科技进步添砖加瓦。
Hey folks, in this wild tech - driven world, why not dive headfirst into the whole tech - sharing scene? Don't just be the one reaping all the benefits; step up and be a contributor too. Whether you're tossing out your code snippets, hammering out some tech blogs, or getting your hands dirty with maintaining and sprucing up open - source projects, every little thing you do might just end up being a massive force that pushes tech forward. And guess what? The Eastern FairyAlliance is this awesome place where we all come together. We're gonna team up and explore the whole silicon - based life thing, and in the process, we'll be fueling the growth of technology