导读
移动对象遍布于我们周围的世界,从天空中飞翔的鸟儿、道路上行驶的车辆,到海洋中游动的鱼群、海域中航行的船舶;从微观世界里不停运动的原子粒子,到浩瀚宇宙中运转的行星。它们源源不断的时空轨迹中蕴含着丰富有价值的时空运动模式。如何系统描述和分类这些模式,一直是地理信息科学、生态学、交通运输等领域的研究重点和难点。为此,本研究提出了一个新的移动对象时空模式分类框架,为跨领域如认知、描述与挖掘运动模式提供了统一的方法论指导。该研究成果已发表于GIS领域顶刊《International Journal of Geographical Information Science》。
文章目录

原文:Tang Jianbo, Deng Min, Peng Ju* et al. How to describe spatiotemporal patterns of moving objects: a new classification framework. International Journal of Geographical Information Science, 1--42.
https://doi.org/10.1080/13658816.2025.2548819
详细长摘要
定位与监测技术的快速发展,大幅提升了我们追踪动态移动对象的能力。作为时空数据挖掘领域的重要方向,完善的运动模式分类体系对于开展运动模式挖掘与分析至关重要。
本研究提出了基于5W1H1R原则的统一运动模式建模与分类框架,并构建了一个自下而上的多层次认知模型,可支持从微观到宏观不同层次的模式分类。该框架以第一性原理和组合思维为指导,从不同的基本维度和组合维度系统刻画与分类运动模式。在此基础上,提炼出 5类关键约束条件,对现有模式类型进行精炼与拓展。
该框架旨在解决四个具有挑战性的问题:
-
存在哪些类型的运动模式,如何对它们进行系统分类?
-
可以从哪些层次和维度对运动模式进行认知与分类?
-
这些模式可能会在哪些时空尺度或粒度上呈现?
-
所提出的分类框架在不同应用领域中的通用性如何?
本研究的贡献包括:
-
提出了一个新的本体模型,从七个维度对移动对象的运动模式进行概念化,并构建了一个多层次认知模型来认知这些模式。
-
提出了一个系统且可扩展的运动模式分类体系,给出了运动模式的形式化定义和示意图。
-
通过在三个具有代表性的领域中的实例化验证了所提分类框架的适用性和通用性。在每个案例中,我们都展示了如何在统一分类体系下识别和解释运动模式。
-
引入了"运动模式可挖掘性(mineability)"的概念,并探讨了该新型分类框架在实践中的应用方式。
该框架在城市交通、海上航运、野生动物迁徙三大领域得到验证,并与四个已有框架从五个方面进行了系统对比,结果表明其在覆盖范围、可扩展性与适应性方面均有优势。研究成果不仅可适配不同类型、不同尺度与分辨率的运动数据,还可作为多模态运动模式挖掘与分析的理论与本体论基础。
概念基础
移动对象的运动行为通常由其内部意图驱动,并通过与外部环境(包括其他对象、空间上下文以及时间约束)的交互作用共同塑造。由此形成的运动模式呈现出显著的多样性、尺度依赖性与层次可分解性。对移动对象及其运动行为的全面认知,是构建系统化、层次化运动模式分类框架的基础前提。为此,本研究提出了运动模式认知框架,主要包括两个核心组成部分:(1)面向移动对象行为特征认知的5W1H1R本体模型,用于从多维角度系统刻画运动模式的关键属性与语义要素;(2)用于认知不同层次运动模式的尺度自适应的多层次认知模型。上述概念性工具为运动模式的分类体系构建、形式化特征描述与挖掘算法设计提供了认知基础与理论支撑。
5W1H1R本体
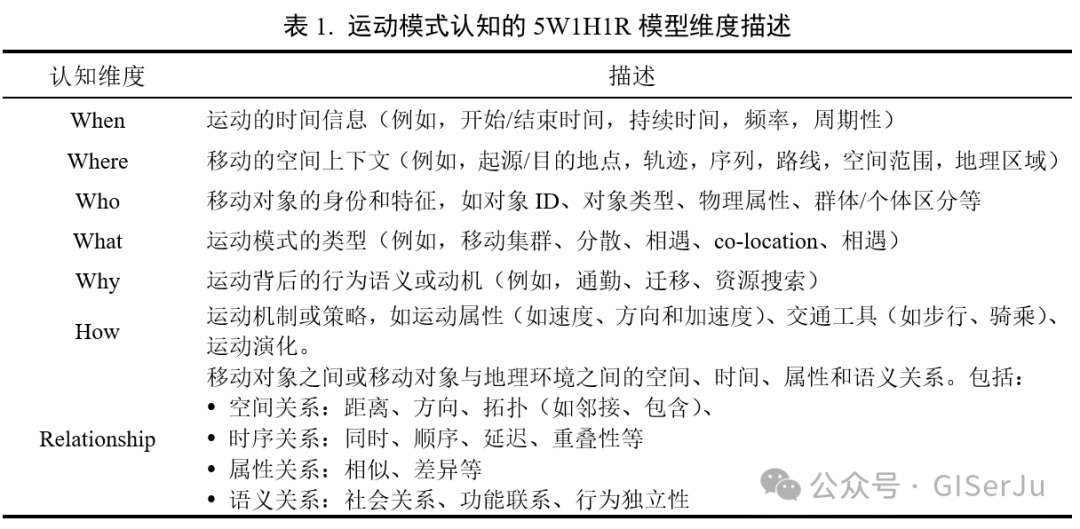
源自新闻传播领域的5W1H原则以及闾国年等人(2017)提出的地理信息六要素表达模型,代表了两类重要的本体论建模方法,广泛用于事件与地理现象的结构化表达。本研究通过融合5W1H原则与地理信息六要素模型的优势,引入面向移动对象行为关系的建模维度,提出了5W1H1R模型,在传统5W1H框架的基础上,新增"关系(Relationship)"作为核心维度(见表1)。该扩展使得模型能够刻画移动对象之间,或对象与环境之间在空间、时间、属性与语义等方面的交互关系,从而显著增强了运动模式表达的关联性与语义感知能力。该模型不仅为不同场景下移动对象运动过程的本体化描述提供了理论基础,还支持运动模式特征的结构化提取与形式化表达,提升了从感知到推理的语义链条完整性。通过与现有GIS本体模型的系统对比(见表2),可以看出5W1H1R模型在支持运动模式认知方面具备更强的维度完整性与语义表达力。结合表1和表2的对比结果可以发现,该模型在维度覆盖、表达精度及针对性等方面均优于现有方法。这使研究人员不仅能够基于传统的时空属性或统计特征来解释运动模式,还可以从意图驱动、过程建构和结果指向等多个角度深入分析运动行为,提供更丰富、系统的认知视角。
多层次认知模型
5W1H1R原则强调在给定的时空尺度和对象层次上,通过多个维度对运动模式进行本体表征。运动模式个体运动模式与群体运动模式之外,能够被识别的运动模式类型内在地受到时空尺度和数据粒度的影响。运动模式也可以以不同的规模和粒度出现。为了解决这个问题,本文提出了一个多层次的认知模型,从不同层次的运动抽象而不是固定的时空尺度来组织对运动模式的理解。如图1(b)所示,这个模型是分层递进的,由三个层次组成:原子、中观(事件级)、宏观(流级)。
(1)原子级别:该级别侧重于最细粒度的运动观察(即最小采样单元),通常在具有相对较高的时间频率和精细的空间粒度的轨迹点级别。
(2)中观(事件,episodic)级别:该层级将细粒度的移动抽象成有关键点/区域(例如,停止和移动)或轨迹片段。
(3)流/结构层:该层级忽略细粒度的运动细节(例如,精确路径),强调移动对象的整体运动规律。
原子、事件和流分别代表了三种不同粒度的运动抽象层次,其认知范围从微观的轨迹点级别延展到粗宏观的起源-目的地流动模式。在每一个层次上,均可基于5W1H1R模型对运动特征进行系统认知与语义描述,确保从微观行为到宏观结构的统一建模。该多层次认知模型的核心优势在于:不依赖固定的时空尺度或采样粒度,而是基于运动数据在不同层次上的抽象表示。运动模式的"层次"并非由绝对的时间采样间隔或空间覆盖范围决定,而是由特定应用领域中运动对象的行为特征所决定。这一特性使得模型具备良好的数据适应性和跨对象泛化能力,可灵活适配不同分辨率和时空范围的运动数据,从而支持不同类型移动对象在不同观测条件下的运动模式分析。
!图片(https://i-blog.csdnimg.cn/img_convert/f3d01b19eb3e6a7404e3faaa88e8d50b.png
运动模式的统一分类
运动模式分类概述
本研究依据空间、时间和运动属性三个基本维度,将复杂的运动模式分解为一组相对简单的基本模式。基本模式是指仅从单一维度刻画移动对象运动特征的最小模式单元,作为构建更复杂运动模式的基础组成块。在每个维度内,基本模式进一步按照移动对象或其运动元素之间的关系类型进行细分类,以确保该维度中所有潜在的变化情形得到系统覆盖。随后,遵循组合原则,通过跨维度地组合两个及以上基本模式,可构建出具有相对更复杂的复合运动模式。这一方式不仅增强了运动模式表达的灵活性,也提升了对复杂运动行为特征的建模能力。
上述分类准则(多维分解和层次组合)共同确保了所提出运动模式分类体系具备良好的灵活性、可扩展性与领域适应性。该体系不仅能够覆盖现有研究中广泛讨论的运动模式类型,也具备应对新兴应用场景下未知运动模式的能力。图4概述了所提出的运动模式分类结果。
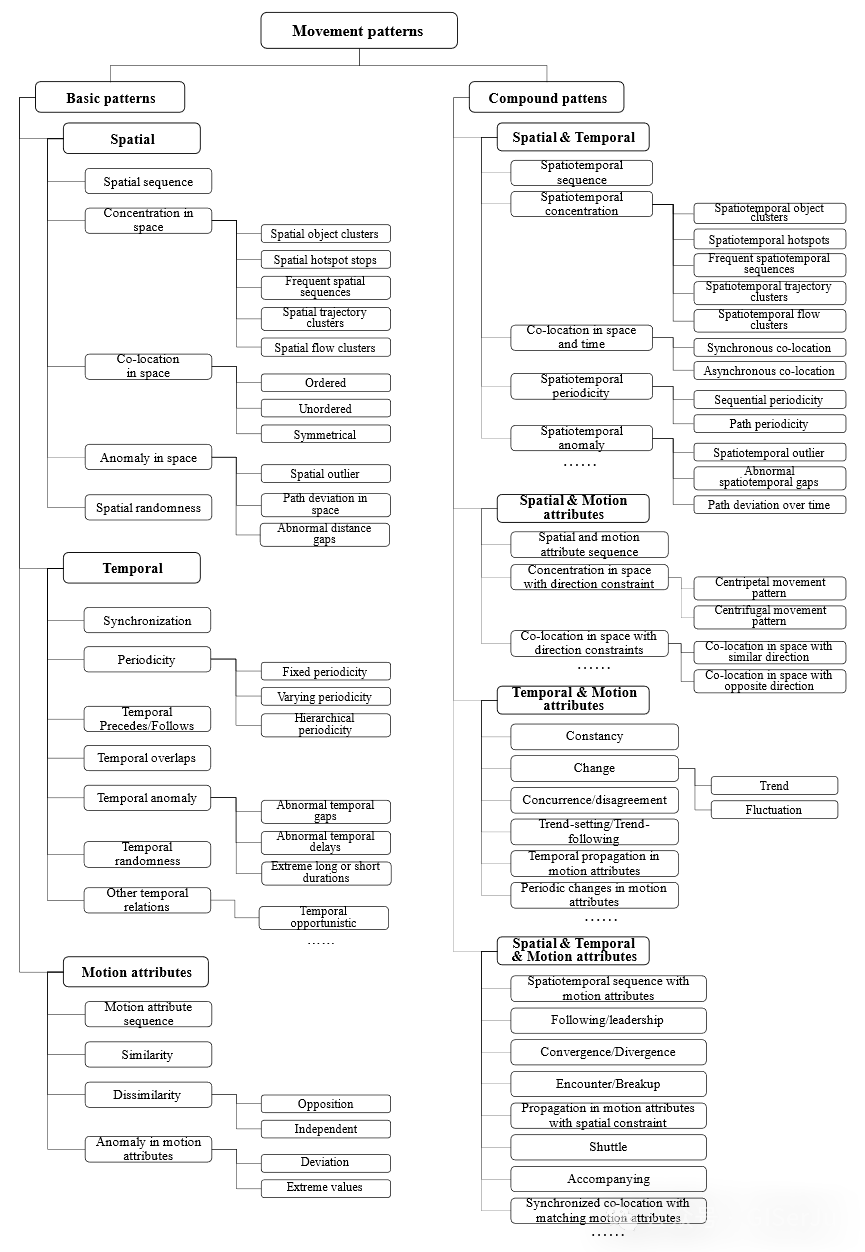
图2. 运动模式的总体分类.
基本运动模式
基本运动模式可依据空间、时间与运动属性三个核心维度进行系统分类。
(1)基本空间运动模式**
基本空间模式聚焦于移动对象的空间轨迹特征,特别是对象之间基于空间位置的关系,或单个对象在空间上的序列性行为。根据空间维度的特征结构,可将其划分为五种基本类型:空间序列 、**空间同位、****空间聚集、**空间异常 、空间随机。
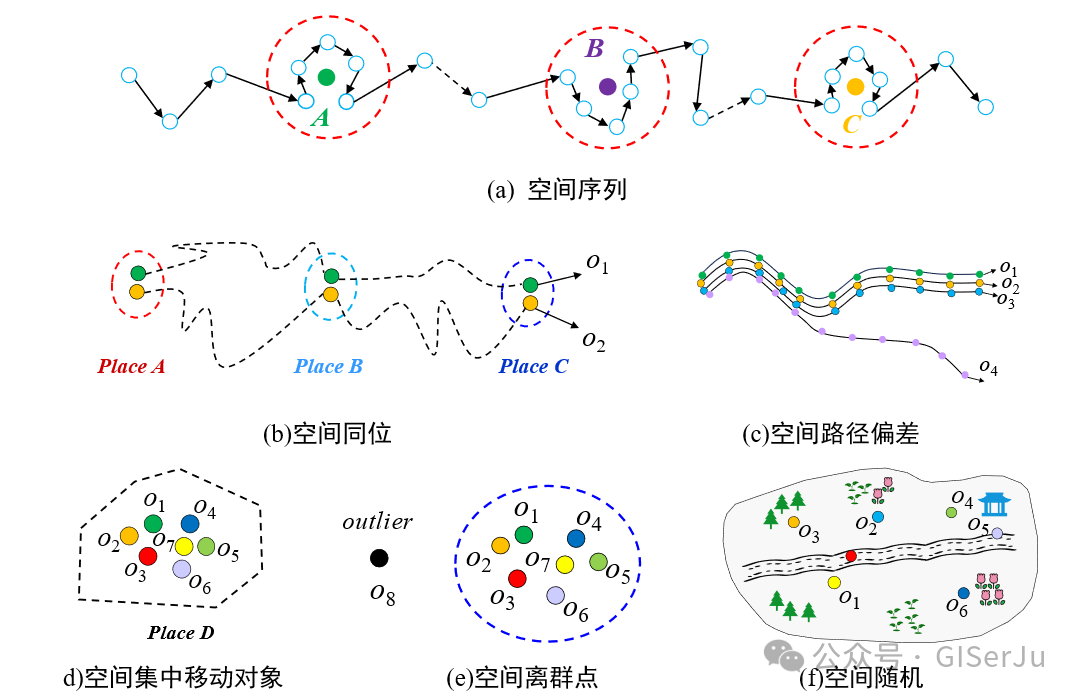
图. 基本空间模式的示意图(不同颜色的圆圈代表不同的移动物体)
(2)基本时间运动模式
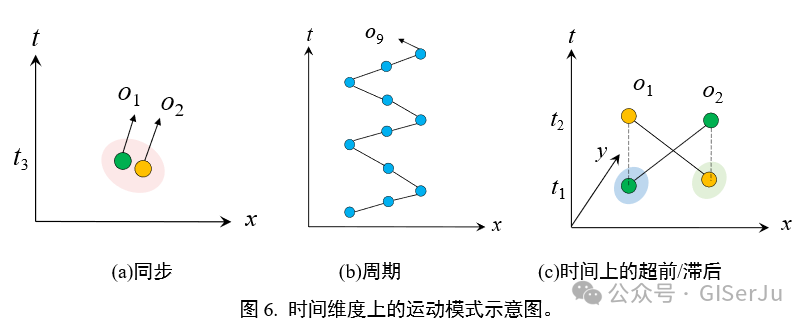
基本时间模式关注移动对象在时间维度上的相对关系,旨在揭示其运动的时序联系。根据时间行为的不同特征,可将其划分为七类基本类型:同步、周期性、时间超前/滞后、时间重叠、时间异常、其他时间关系(如时间机会主义)、时间随机性。
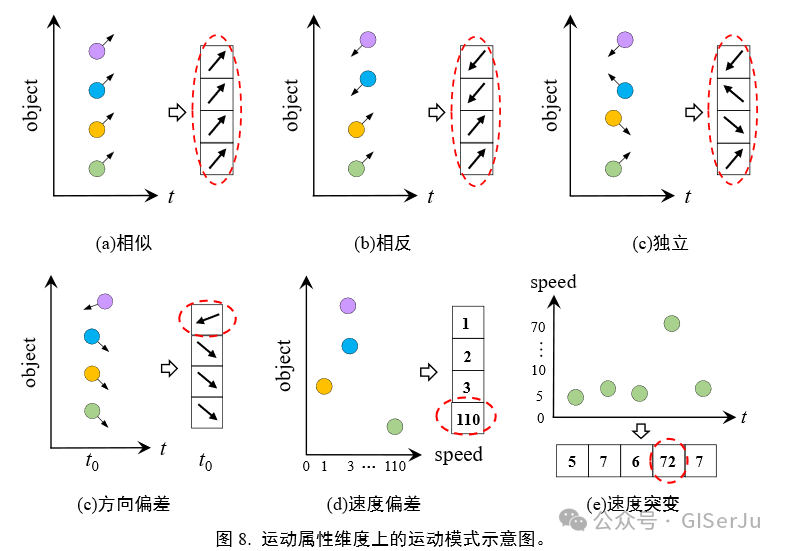
(3)基本运动属性模式
基本运动属性模式主要关键移动对象的关键运动属性(如速度、方向、加速度)。基于相对运动(Relative motion,REMO)理论,本研究将运动属性模式划分为四类基本类型:运动属性序列、相似、相异、运动属性异常。
复合运动模式
复合运动模式是两种或两种以上基本运动模式在不同维度上组合形成的相对复杂的运动模式。基于组合原则,本研究按照4个主要组合维度对复合模式进行分类。尽快理论上可以通过枚举所有可能的基本模式组合,推导出完成的复合运动模式体系,但由于篇幅有限和应用关注点的显著,本研究重点探讨现实世界应用中较为常见且研究广泛的复合运动模式类型。这并非意味着其他组成形成的复合模式不具价值,事实上,它们可能在特定领域或应用场景下具有重要意义。
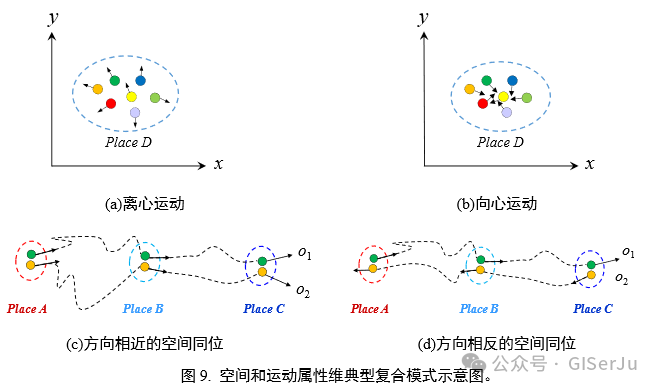
(1)跨空间和运动属性维度的复合运动模式
该类别的复合运动模式由空间维度和运动属性维度上的基本模式组合而成,可以从两个视角来理解:一是受到空间约束的基本运动属性模式,二是运动属性作为运动对象内部动力学特征嵌入的基本空间模式。通过将基本的空间模式和运动属性模式相组合,可生成二十多种余种复合运动模式,涵盖丰富的运动行为。典型代表模式包括:空间与运动属性序列、具有方向约束的空间聚集、具有方向约束的空间同位。
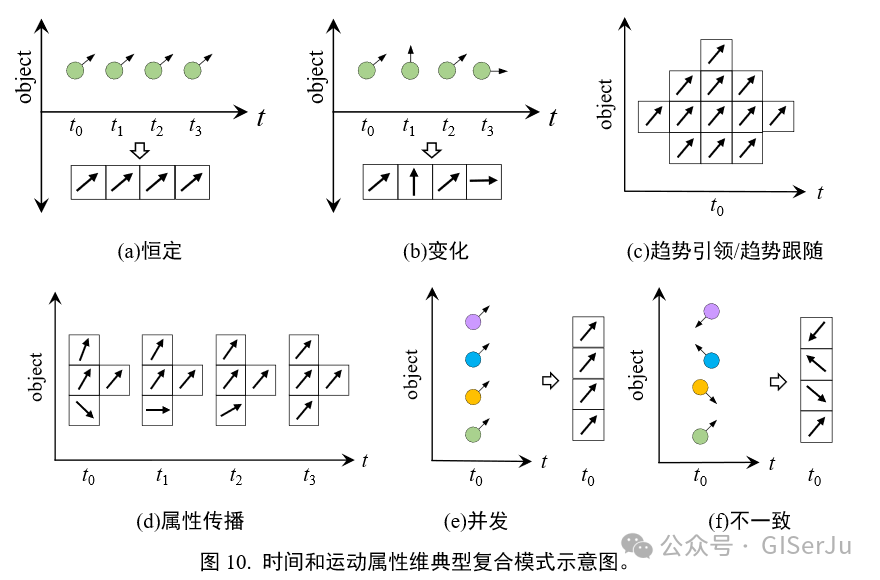
(2)跨时间和运动属性维度的复合运动模式**
基于基本时间模式和运动属性模式的组合,以及运动属性随时间的动态演化过程,可以构建跨空间维度和运动属性维度的复合运动模式。典型代表模式包括:恒定(constant)、变化(change)、并发/不一致、趋势引领/趋势跟随、运动属性传播、运动属性的周期性变化。
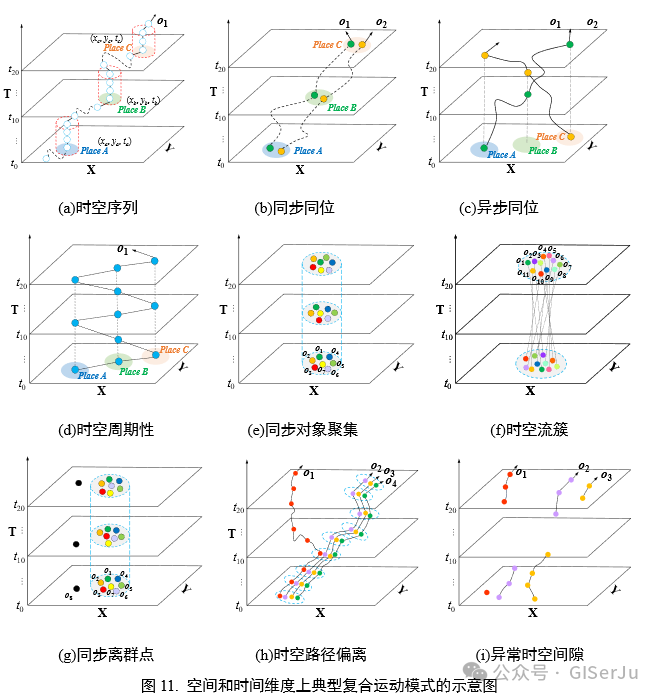
(3)跨时空维度的复合运动模式**
时空维度是研究运动模式的两个重要方面。将基本的空间模式与时间模式进行组合,可以得到丰富的跨时空维度复合运动模式,用于刻画移动对象在"何时""何地"运动的全过程。初步推导表明,该组合可产生超过40种模式类型。典型代表模式包括:时空序列、时空同现、时空周期性、时空聚集(如时空对象聚类、时空热点、频繁时空序列、时空轨迹簇、时空流簇)、时空异常(时空异常点、时空偏离和异常时空间隙)
(4)跨时空和运动属性维度的复合运动模式**
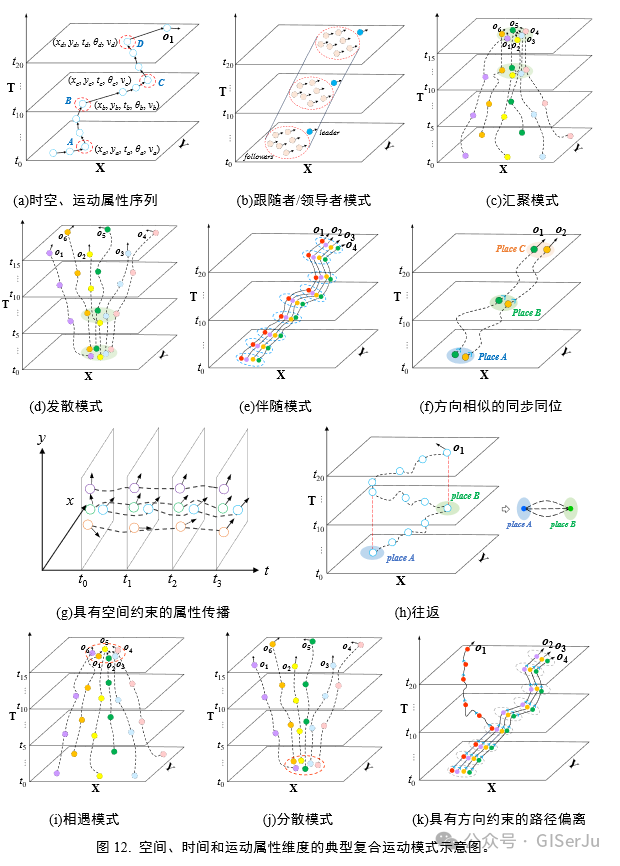
在所有复合运动模式中,跨空间、时间和运动属性三个基本维度的组合生成了相对最复杂的运动模式类型。这类模式能够同时捕捉移动对象在空间、时间动态以及运动属性(如速度、方向)等多个方面的交互特征。任何一个维度的基本模式都可以显式地增强对其他两个维度复合运动模式的刻画能力。典型代表模式包括:时空、运动属性序列、跟随/领导者模式、汇聚/发散模式、伴随模式、相遇/分离、具有空间约束的传播、往返(Shuttle)、运动属性约束的同步空间同位、运动属性约束的时空路径偏离
验证与分析
一个系统完备的运动模式分类体系为运动行为分析奠定了坚实的概念基本和理论支撑。为验证所提出分类体系的实用性和通用性,在三个涵盖不同类型移动对象的典型应用领域中进行了实例化研究,分别从五个关键方面系统分析了其适用性。此外,为评估本框架的覆盖能力和系统性,选取了四个具有代表性的现有运动模式分类体系作为对比对象,分别为:Laube 等人(2002年)、Andrienko 等人(2007年)、Dodge 等人(2008年)与 Li 等人(2014年)。
运动数据特征
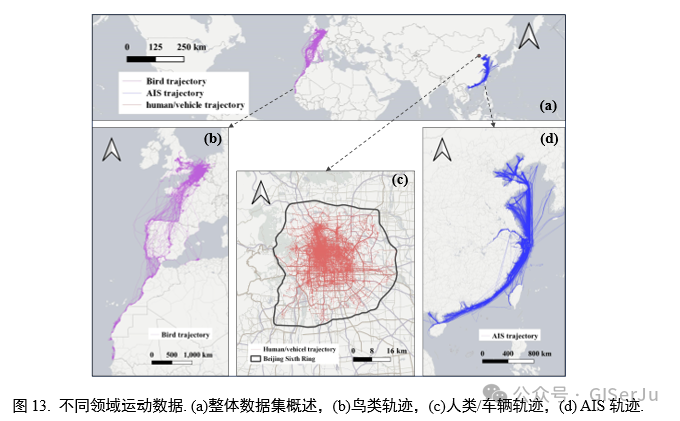
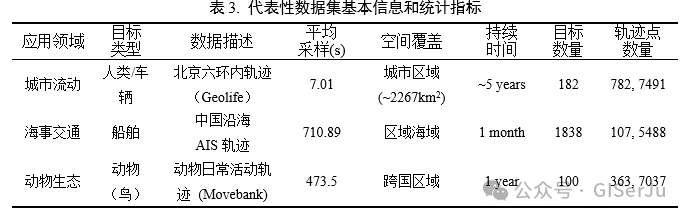
图13展示了三个应用领域中代表性移动对象的运动数据轨迹样本,表3进一步踪迹了各数据集的基本信息与统计特征。不同领域的运动数据在空间间范围、数据规模和时空粒度等方面存在显著差异。这种异质性对开发具备可扩展性与通用性的运动模式挖掘算法构成了重大挑战。在此背景下,所提出的运动模式分类体系通过构建统一的运动模式本体结构,为描述、比较和分析不同来源的运动数据提供了坚实的理论支撑与认知基础,进而促进了跨领域的运动行为建模和分析。
影响运动的因素
影响移动对象运动行为的因素具有显著的领域特异性。在城市环境中,人类的移动往往受社会经济活动的驱动,如通勤、教育和休闲等;而在生态系统中,动物的运动则主要由觅食、迁徙、繁殖等生理和生态需求决定;在海洋环境中,船舶的航行则受到航运规则、航行任务及海洋环境等多重因素的共同影响。
运动模式的认知与语义解读
在5W1H1R本体与多层次认知模型的支持下,本研究构建的分体体系提供了一种更为系统、全面的运动模式认知方式,弥补了现有基线框架在认知维度上的不足。与传统框架主要侧重时空特征的描述不同,5W1H1R模型引入了"Why(为何)"与"How(如何)"两个维度,从语义和上下文层面强化了对运动行为的解释能力,使观察到的运动模式得以更好地与具体领域情境关联,为深入理解运动背后的行为机制提供支持。
运动模式的时空尺度和粒度
图13和表1展示了不同应用领域的运动数据在时空尺度和粒度上的显著差,这表明运动模式可以在不同的时空层面上(尺度和粒度)显现。例如,在城市街区级别(小空间范围)与分钟至小时的短时间尺度上,可以观察到人类流簇和轨迹簇;而在海洋或野生动物领域,类似的运动模式则可能跨越更大的地理范围,并持续数天乃至数周。所提出的分类框架并不依赖固定的时空尺度或数据粒度,而是通过"自底向上"的多层次运动抽象机制实现跨尺度适应性。这使得其在面对异构数据和多领域应用时具有更强的鲁棒性和泛化能力。相比之下,基线框架讨论了尺度和粒度对运动模式的影响,但缺乏一种明确的机制来泛化具有不同数据特征的跨领域运动模式认知。
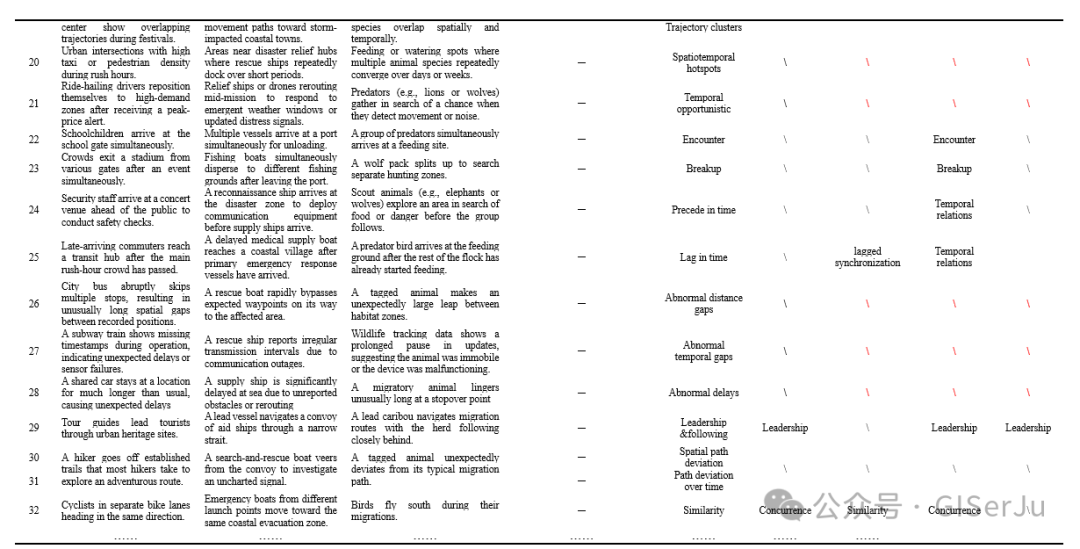
运动模式通用性与适应性
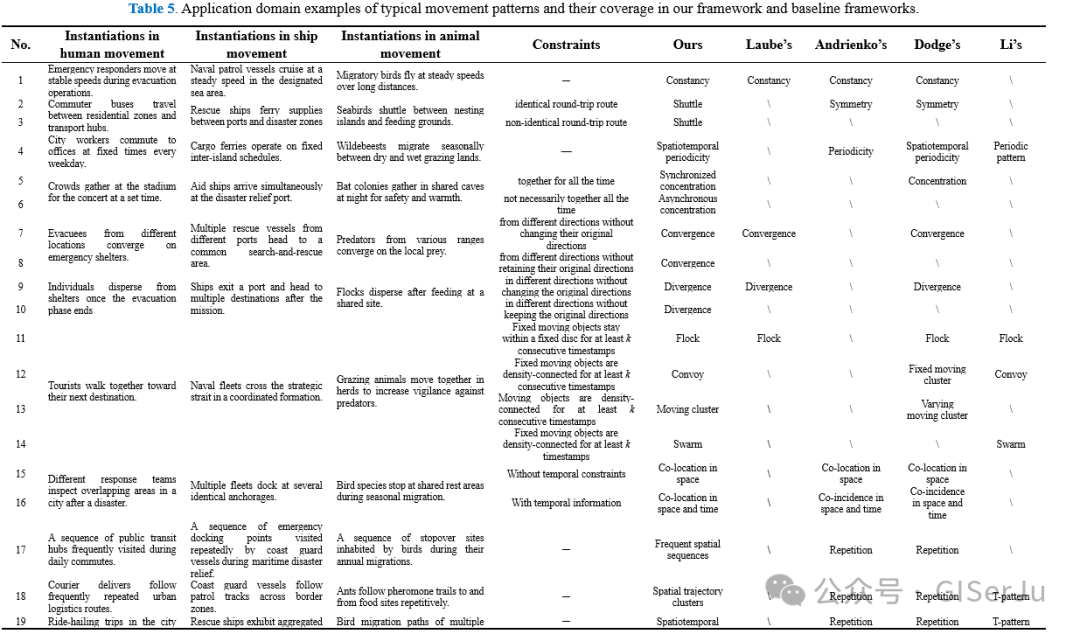
不同领域中均可以观测到丰富多样的运动模式,且同一类型的运动模式往往在不同的领域中存在。下表给出了 32 个具体示例,展示了典型运动模式在城市、海洋和野生动物领域中的表现形式。尽管现有分类框架亦能描述大部分现实世界中的移动行为,本研究的分类体系模式定义的精细化与适应性方面进行了扩展。例如,在我们的框架中,"汇聚(convergence)"模式并不限于移动路径在固定位置严格相交,且仅满足狭窄方位角与时间阈值的情况;相反,它能够容纳更丰富的汇聚行为,如多个移动对象从不同且变化的方向接近同一共享区域,尤其适用于受道路网络或自然地形限制的环境。这对于建模和发现潜在的群体事件非常有帮助,并可在应急/灾害响应、人群管理等应用中显著提升态势感知能力并支持及时决策。
讨论---多层次认知与运动模式可挖掘性
本研究所提出的分类框架可适用于多种类型的移动对象及其应用领域。运动模式的认知基于自下而上的三个运动抽象层次,而非固定或绝对的时空尺度或粒度。对于具有不同运动空间范围和时间长度的移动对象,其运动模式都可以在这三个层次上进行分类与分析。
运动模式与运动数据的尺度、粒度和分辨率之间存在密切关系。同一类型运动模式可能在不同的时空尺度(从小到大、从局部到整体)下出现。例如,"移动簇"既可以表现为公园内一起行走的小群体(小尺度),也可以表现为在海洋上编队航行的船队(大尺度)。需要强调的是,空间尺度与时间尺度并不总是成比例变化的。长期模式并不一定意味着大空间尺度或高流动层。例如,多艘船舶在两个月内协调航行,虽然具有较长的时间跨度和较大的空间覆盖范围,但仍然可能体现为原子层级的运动行为。反之,全国范围内的航空客流虽然在空间尺度和流动层级上很大,但在时间上却可能属于短期模式。因此,在本分类框架中不存在普遍适用或绝对的空间或时间尺度大小,空间与时间的关系具有领域特异性,必须根据具体应用情境灵活建模。
此外,由于运动数据的分辨率和粒度会影响可检测到的运动模式类型,我们提出了运动模式可挖掘性(mineability)的概念。在本研究中,它被定义为在给定时空尺度和数据分辨率的条件下,从运动数据中提取运动模式的可行性与准确性。类似的见解可在人类运动可预测性的研究中找到,已有研究表明,可预测性会随着数据的空间与时间分辨率变化而变化(Song 等,2010;Smolak 等,2022)。同样,在运动模式挖掘中,数据的时空分辨率与粒度会影响模式的可挖掘性。通常,较低分辨率的数据会降低某些运动模式的可挖掘性,因为识别这些模式(尤其是原子层模式)所需的空间或时间细节可能会丢失。例如,当具备足够的时间和空间粒度时,"移动簇"可以被更清晰地检测出来;然而,当数据分辨率降低时,该模式可能会变得模糊,甚至完全无法识别。
数据分辨率是一个相对概念。高分辨率或低分辨率应根据所研究移动对象的空间与时间特征来判断。例如,5 分钟的采样间隔对于跟踪海上船舶可能属于高分辨率,但对于研究城市车辆运动则显得过于粗糙。因此,分辨率的选择应综合考虑对象的运动特性以及所分析的运动模式层级。

彭举:中南大学地球科学与信息物理学院在读博士生,主要研究方向:时空数据挖掘,运动模式挖掘、地图综合
邮箱:daisy_pj@csu.edu.cn
END
我的GZH:GISerJu
让分享成为一种力量
搜索关注!