Isaac Sim机械臂教程 - 阶段3:行为系统与决策网络
阶段2链接 juejin.cn/post/755492...
本节效果演示
1. 理论基础
1.1 Isaac Sim行为系统架构
Isaac Sim的行为系统采用分层决策架构,核心组件包括:
- 行为模块(Behavior Module):定义具体的机械臂行为逻辑
- 决策网络(Decider Network):协调和管理行为的执行
- 状态监控(State Monitor):实时跟踪系统状态并提供诊断信息
- 上下文管理(Context Management):维护全局状态和信息传递
关键设计原则:
- 模块化:每个行为独立开发,可复用
- 响应式:根据环境变化实时调整决策
- 监控友好:提供丰富的状态信息用于调试
1.2 决策网络工作原理
决策网络是Isaac Sim行为系统的核心控制器:
markdown
环境感知 → 状态评估 → 行为选择 → 动作执行 → 状态更新
↑ ↓
──────────────── 反馈与监控 ──────────────────核心特性:
- 状态驱动:基于当前状态选择合适的行为
- 上下文感知:维护丰富的环境信息
- 监控集成:支持实时状态监控和诊断
1.3 Isaac Sim扩展模块系统
- Isaac Sim使用扩展(Extension)系统管理模块
isaacsim.cortex等核心模块只有在SimulationApp创建后才能导入- 模块路径需要在运行时动态配置
2. 状态监控系统详解
2.1 ContextStateMonitor核心机制
python
class ContextStateMonitor(DfDiagnosticsMonitor):
"""
上下文状态监控器
负责读取决策网络的状态信息并实时显示
"""
def __init__(self, print_dt, diagnostic_fn=None):
super().__init__(print_dt=print_dt)
# print_dt: 状态更新频率(秒)
def print_diagnostics(self, context):
# 从context对象中提取状态信息
if hasattr(context, "diagnostics_message"):
print("====================================")
print(context.diagnostics_message)工作原理:
- 定时监控:按指定频率检查决策网络状态
- 信息提取:从context对象获取诊断消息
- 状态显示:格式化输出当前行为状态
2.2 监控器集成机制
python
# 创建监控器
context_monitor = ContextStateMonitor(print_dt=0.25)
# 集成到决策网络
decider_network.context.add_monitor(context_monitor.monitor)3. 行为加载与选择系统
3.1 行为注册机制
Isaac Sim提供了预定义的行为模块字典:
python
behaviors = {
"block_stacking_behavior": block_stacking_behavior,
"peck_decider_network": peck_decider_network,
"peck_game": peck_game,
"peck_state_machine": peck_state_machine,
"simple_decider_network": simple_decider_network,
"simple_state_machine": simple_state_machine,
}行为分类:
- 简单行为 :
simple_decider_network,simple_state_machine(学习和测试用) - 交互行为 :
peck_game(人机交互场景) - 复杂任务 :
block_stacking_behavior(多步骤操作)
3.2 双路径加载机制
python
if args.behavior in behaviors:
# 路径1:预定义行为
decider_network = behaviors[args.behavior].make_decider_network(robot)
else:
# 路径2:动态加载外部行为模块
decider_network = load_behavior_module(args.behavior).make_decider_network(robot)设计优势:
- 灵活性:支持内置和自定义行为
- 扩展性:可以轻松添加新的行为模块
- 统一接口 :所有行为都通过
make_decider_network(robot)创建
4. 基于实战经验的解决方案
4.1 导入顺序修复方案
核心教训: isaacsim.cortex模块必须在SimulationApp`创建后才能导入。
python
# ✅ 正确的导入顺序
from isaacsim import SimulationApp
simulation_app = SimulationApp({"headless": False})
# 只有在SimulationApp创建后,才能导入Isaac扩展模块
from isaacsim.cortex.framework.cortex_world import CortexWorld
# ... 其他isaac模块导入4.2 路径配置优化方案
python
import sys
import os
def setup_isaac_paths():
"""
基于自己的进行路径配置
"""
# Isaac Sim基础路径
ISAACSIM_PATH = "/home/lwb/isaacsim" #以笔者本地路径为例
# 添加behaviors模块路径
BEHAVIORS_PATH = os.path.join(
ISAACSIM_PATH,
"standalone_examples/api/isaacsim.cortex.framework"
)
if BEHAVIORS_PATH not in sys.path:
sys.path.insert(0, BEHAVIORS_PATH)
print(f"已添加behaviors路径: {BEHAVIORS_PATH}")5. 第三阶段完整实现
python
# stage3_behavior_system.py
# 支持block_stacking_behavior的完整环境
import argparse
import sys
import os
from isaacsim import SimulationApp
def setup_isaac_paths():
"""配置Isaac Sim模块路径"""
ISAACSIM_PATH = "/home/lwb/isaacsim"
BEHAVIORS_PATH = os.path.join(
ISAACSIM_PATH,
"standalone_examples/api/isaacsim.cortex.framework"
)
if BEHAVIORS_PATH not in sys.path:
sys.path.insert(0, BEHAVIORS_PATH)
print(f"已添加behaviors路径: {BEHAVIORS_PATH}")
def create_behavior_selector():
"""创建行为选择器"""
parser = argparse.ArgumentParser("isaac_behavior_demo")
parser.add_argument(
"--behavior",
type=str,
default="simple_decider_network",
help="选择要运行的行为模块"
)
args, _ = parser.parse_known_args()
return args
def create_context_monitor():
"""创建状态监控器"""
class SimpleStateMonitor:
def __init__(self, update_freq=0.5):
self.update_freq = update_freq
def monitor(self, context):
"""监控回调函数"""
if hasattr(context, 'diagnostics_message'):
print("====================================")
print(context.diagnostics_message)
print("====================================")
return SimpleStateMonitor()
def load_behavior_safely(behavior_name):
"""安全加载行为模块"""
try:
from behaviors.franka.franka_behaviors import behaviors
if behavior_name in behaviors:
print(f" → 使用预定义行为: {behavior_name}")
return behaviors[behavior_name]
else:
print(f" → 行为 '{behavior_name}' 不在预定义列表中")
# 显示可用行为
print(" 可用行为:")
for name in behaviors.keys():
print(f" - {name}")
return None
except ImportError as e:
print(f" ❌ 行为模块加载失败: {e}")
return None
def create_complete_environment(world, robot):
"""
创建完整的方块环境(支持block_stacking_behavior)
与官方franka_examples_main.py保持一致
"""
import numpy as np
from isaacsim.core.api.objects import DynamicCuboid
# 定义方块规格(与官方一致)
class CubeSpec:
def __init__(self, name, color):
self.name = name
self.color = np.array(color)
obs_specs = [
CubeSpec("RedCube", [0.7, 0.0, 0.0]), # 红色方块
CubeSpec("BlueCube", [0.0, 0.0, 0.7]), # 蓝色方块
CubeSpec("YellowCube", [0.7, 0.7, 0.0]), # 黄色方块
CubeSpec("GreenCube", [0.0, 0.7, 0.0]), # 绿色方块
]
width = 0.0515 # 方块边长(与官方一致)
created_objects = []
print(f"创建完整方块环境,共{len(obs_specs)}个方块...")
# 使用线性分布创建方块(与官方逻辑一致)
for i, (x, spec) in enumerate(zip(np.linspace(0.3, 0.7, len(obs_specs)), obs_specs)):
print(f" 创建 {spec.name} at ({x:.3f}, -0.4, {width/2:.3f})")
obj = world.scene.add(
DynamicCuboid(
prim_path="/World/Obs/{}".format(spec.name),
name=spec.name,
size=width,
color=spec.color,
position=np.array([x, -0.4, width / 2]),
)
)
# 注册为障碍物
robot.register_obstacle(obj)
created_objects.append(obj)
print(f" ✅ {spec.name} 创建并注册成功")
return created_objects
def create_simple_environment(world, robot):
"""创建简化环境(适用于简单行为)"""
import numpy as np
from isaacsim.core.api.objects import DynamicCuboid
test_cube = world.scene.add(
DynamicCuboid(
prim_path="/World/TestCube",
name="TestCube",
size=0.05,
color=np.array([0.8, 0.2, 0.2]),
position=np.array([0.5, -0.3, 0.025]),
)
)
robot.register_obstacle(test_cube)
print("✅ 简化测试环境创建完成")
return [test_cube]
def create_test_environment(world, robot, behavior_name):
"""
根据行为类型创建合适的环境
"""
if behavior_name == "block_stacking_behavior":
return create_complete_environment(world, robot)
else:
return create_simple_environment(world, robot)
def print_behavior_info(behavior_name):
"""打印行为信息"""
behavior_descriptions = {
"simple_decider_network": "简单决策网络 - 基础行为演示",
"simple_state_machine": "简单状态机 - 状态转换演示",
"block_stacking_behavior": "方块堆叠行为 - 复杂操作任务",
"peck_decider_network": "啄击决策网络 - 精确定位任务",
"peck_game": "啄击游戏 - 交互式任务",
"peck_state_machine": "啄击状态机 - 组合行为"
}
description = behavior_descriptions.get(behavior_name, "未知行为")
print(f"当前行为: {behavior_name} ({description})")
def main():
"""主程序"""
print("="*60)
print("ISAAC SIM 行为系统架构演示 - 修复版")
print("="*60)
# 步骤1:配置路径
setup_isaac_paths()
# 步骤2:解析行为选择
args = create_behavior_selector()
print_behavior_info(args.behavior)
# 步骤3:创建仿真应用
print("初始化 Isaac Sim...")
print("重要提示: 只有在SimulationApp创建后,isaacsim.cortex模块才能正常导入")
simulation_app = SimulationApp({"headless": False})
try:
# 步骤4:导入Isaac模块
import numpy as np
from isaacsim.cortex.framework.cortex_world import CortexWorld
from isaacsim.cortex.framework.robot import add_franka_to_stage
print("✅ SimulationApp初始化成功,现在可以导入Isaac模块了")
# 步骤5:创建世界和机械臂
print("Step 1: 初始化仿真世界...")
world = CortexWorld()
robot = world.add_robot(
add_franka_to_stage(name="franka", prim_path="/World/Franka")
)
print("✅ 机械臂 'franka' 添加成功")
# 添加地面
world.scene.add_default_ground_plane()
# 根据行为类型创建合适的环境
print(f"Step 2: 为'{args.behavior}'创建合适的环境...")
test_objects = create_test_environment(world, robot, args.behavior)
# 步骤6:创建状态监控系统
print("Step 3: 创建状态监控系统...")
state_monitor = create_context_monitor()
print(f"✅ 状态监控器创建成功 (更新频率: {state_monitor.update_freq}秒)")
# 步骤7:加载和创建行为模块
print(f"Step 4: 加载行为模块 '{args.behavior}'...")
behavior_module = load_behavior_safely(args.behavior)
if behavior_module:
# 创建决策网络
print(" → 创建决策网络...")
decider_network = behavior_module.make_decider_network(robot)
# 集成状态监控器
print(" → 集成状态监控器...")
decider_network.context.add_monitor(state_monitor.monitor)
# 将决策网络添加到世界
print(" → 将决策网络注册到世界...")
world.add_decider_network(decider_network)
print(f"✅ 行为模块 '{args.behavior}' 加载成功!")
# 显示系统信息
print("\n" + "="*60)
print("行为系统信息")
print("="*60)
print(f"当前行为: {args.behavior}")
print(f"决策网络类型: {type(decider_network).__name__}")
print(f"监控器更新频率: {state_monitor.update_freq}秒")
print(f"机械臂名称: {robot.name}")
print(f"环境物体数量: {len(test_objects)}")
# 显示环境物体信息
if test_objects:
print("环境物体列表:")
for i, obj in enumerate(test_objects):
print(f" {i+1}. {obj.name}")
print("="*60)
# 步骤8:启动仿真
print("Step 5: 启动仿真...")
print("行为系统已激活,开始执行决策网络...")
print("注意观察控制台输出的状态信息!")
print("\n按 Ctrl+C 停止仿真\n")
# 运行世界仿真
world.run(simulation_app)
else:
print("❌ 无法加载行为模块,请检查行为名称是否正确")
return
except KeyboardInterrupt:
print("\n仿真被用户中断")
except Exception as e:
print(f"❌ 运行时错误: {e}")
import traceback
traceback.print_exc()
finally:
# 清理资源
simulation_app.close()
print("仿真已关闭")
if __name__ == "__main__":
main()6. 测试验证
6.1 运行测试
bash
# 激活环境
conda activate isaaclab_4_5_0
cd ~/isaacsim
source setup_conda_env.sh
cd ~/Project/CleanUp_Bench_SVSDF/franka/
# 测试block_stacking_behavior行为模块
python stage3_behavior_system.py --behavior=block_stacking_behavior6.2 预期成功输出
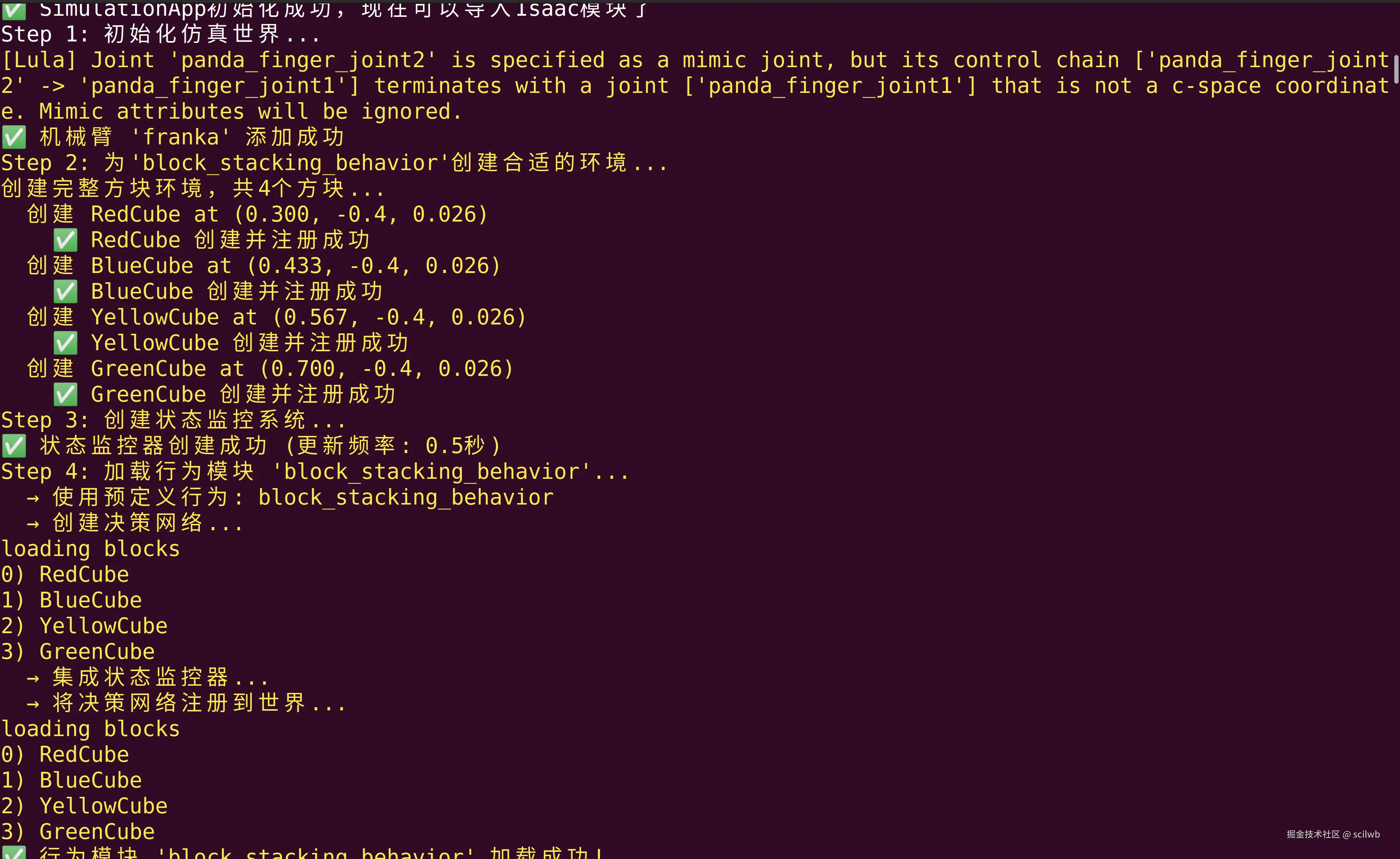
6.3 验证成功的关键标志
- ✅ 看到"SimulationApp初始化成功"消息
- ✅ 行为模块成功加载且无ImportError
- ✅ 机械臂和测试环境正确显示
- ✅ 开始输出实时状态监控信息
- ✅ Isaac Sim窗口显示机械臂开始执行行为
7. 行为模块深入分析
7.1 行为接口标准
每个行为模块都必须实现标准接口:
python
def make_decider_network(robot):
"""
创建决策网络的标准接口
Args:
robot: 机械臂实例,包含所有运动学和感知信息
Returns:
DeciderNetwork: 配置完成的决策网络实例
"""
# 实现具体的行为逻辑
pass7.2 不同行为的特点
- simple_decider_network: 基础决策演示,适合学习和调试
- simple_state_machine: 状态机模式,清晰的状态转换
- block_stacking_behavior : 复杂任务,包含感知、规划、执行(笔者的这个策略文件路径为
/home/lwb/isaacsim/exts/isaacsim.cortex.behaviors/isaacsim/cortex/behaviors/franka/block_stacking_behavior.py)
8. 小结
第三阶段核心收获:
理论层面:
- 深入理解Isaac Sim的行为系统架构
- 掌握决策网络的工作原理和状态管理
- 理解扩展模块系统的导入机制
实践层面:
- 掌握正确的模块导入顺序
- 实现了健壮的行为加载和错误处理机制
- 集成了实时状态监控系统
关键技术突破:
- 导入时序管理: 解决了Isaac Sim扩展模块的导入问题
- 行为模块化: 理解了可插拔的行为系统设计
- 状态监控: 实现了实时系统状态跟踪
- 错误处理: 建立了完善的异常处理机制
重要设计模式:
- 工厂模式 : 通过
make_decider_network统一创建决策网络 - 观察者模式: 状态监控器观察决策网络状态变化
- 策略模式: 不同行为代表不同的执行策略
现在你已经成功掌握了Isaac Sim行为系统的核心技术。第四阶段我们将学习固定在移动底盘时的动态抓取,将所有组件整合成完整的智能机械臂系统!